Техническое решение относится к колесным самоходным транспортным средствам с гидрообъемной трансмиссией привода всех колес. Оно касается управления насосами и гидромоторами гидрообъемной трансмиссии многоколесной транспортной машины.
Из патентной документации известны различные системы управления гидрообъемными трансмиссиями колесных машин (охранные документы, выданные в Германии, №№3543073, 3820717, 19930056, МПК В 60 К 17/10, в США №4672811, НКИ 60/449, №№5184466, 5561979, НКИ 60/448, ЕПВ №1079153, во Франции №2803889, МПК F 16 H 61/46, в Японии №№2861466, 2874339, МПК F 16 H 61/40, №2882296, МПК В 60 К 41/16).
В патенте №736708, МПК F 16 H 61/46, выданном ЕПВ, представлено устройство регулирования рабочего объема насоса, содержащее электронный блок управления, к входам которого подключены электрические цепи подачи сигналов от датчика перемещения педали управления подачей топлива к двигателю, от датчика частоты вращения вала двигателя и от датчика перемещения штока гидроцилиндра изменения рабочего объема насоса, а с выходами электронного блока соединены электромагниты перемещения золотника гидрораспределителя. В другом патенте №1020314, МПК В 60 К 17/10, выданном ЕПВ, представлена система управления гидрообъемной трансмиссией, содержащая электронный блок, к входам которого подключены датчик положения педали подачи топлива двигателю и датчик частоты вращения вала двигателя, а с выходами соединены электрические средства изменения рабочего объема насоса и гидромотора. Указанные охранные документы касаются гидрообъемных трансмиссий, содержащих только один насос. Однако в гидрообъемных трансмиссиях полноприводных колесных машин целесообразно использовать большее число насосов, образующих с гидромоторами несколько гидравлических контуров, что позволяет продолжить движение машины в случае неисправности гидроагрегатов одного из гидравлических контуров. Такие гидрообъемные трансмиссии показаны в патенте №468956, МПК F 16 H 61/46, выданном в Швеции, в заявке №2741130, МПК F 16 H 61/42, на выдачу патента во Франции на систему управления гидрообъемной трансмиссией четырехколесного трактора с нерегулируемыми гидромоторами привода передних колес.
В качестве ближайшего аналога принята "Система управления многоосным транспортным средством", имеющим множество колес с приводом от нерегулируемых гидромоторов гидрообъемной трансмиссии, соединенных гидролиниями с насосами, оснащенными регуляторами мощности, управляемыми от давления нагнетания рабочей жидкости (см. выданное в СССР авторское свидетельство №1065251, МПК В 60 К 17/10, 1980 г.). Эта гидрообъемная трансмиссия имеет сложное управление, осуществляемое путем выключения из работы части насосов и гидромоторов и переключения ступеней в колесных редукторах, соединяющих гидромоторы с колесами, при этом во время работы всех ее гидроагрегатов возможна разная нагрузка на них, из-за чего срок их службы получается разным.
Решаемая задача - создание надежной системы управления гидрообъемной трансмиссией полноприводной многоколесной транспортной машины с тремя парами колес, имеющих привод от регулируемых гидромоторов, попарно включенных в отдельные гидравлические контуры, снабжаемые рабочей жидкостью под давлением отдельными регулируемыми насосами, с обеспечением одинакового срока службы гидроагрегатов трансмиссии и возможности удобного активного выбора оптимального режима работы двигателя и гидрообъемной трансмиссии в зависимости от дорожной ситуации, складывающейся во время движения машины.
Решение этой задачи обеспечено тем, что система управления гидрообъемной трансмиссией многоколесной транспортной машины, имеющей шесть колес с приводом от регулируемых гидромоторов, связанных гидролиниями, образующими циркуляционные гидравлические контуры, с насосной станцией, состоящей из трех регулируемых насосов, имеющих привод от двигателя машины, содержит электрические средства изменения рабочего объема насосов и гидромоторов, датчик частоты вращения вала насосной станции, электрическую цепь между датчиком и электрическими средствами изменения рабочего объема насосов, в которой расположены переменный резистор и выключатель, управляемые педалью подачи топлива двигателю, резистор, включенный параллельно выключателю, и пороговый регулирующий элемент, электрическую цепь между датчиком и электрическими средствами изменения рабочего объема гидромоторов, в которой расположен пороговый регулирующий элемент с изменяемым педалью посредством переменного резистора и выключателя порогом, корректоры сигналов, передаваемых к электрическим средствам изменения рабочего объема насосов и гидромоторов привода крайних колес, управляемые датчиками разности давлений в гидравлических контурах привода средних колес и привода каждой пары крайних колес.
При такой системе управления гидрообъемной трансмиссией обеспечена возможность выбора педалью в зависимости от дорожной ситуации либо экономичного режима движения машины, при котором двигатель работает при средней частоте вращения его вала, при которой получается меньший расход топлива, либо динамичного режима, при котором двигатель работает при большой частоте вращения его вала, развивая большую мощность, при этом на всех режимах обеспечена одинаковая нагрузка на гидроагрегаты вследствие выравнивания давления в гидравлических контурах посредством корректоров сигналов, передаваемых к электрическим средствам изменения рабочего объема насосов и гидромоторов привода крайних колес.
Корректоры сигналов, передаваемых к электрическим средствам изменения рабочего объема насоса и гидромоторов привода каждой пары крайних колес, выполнены в виде переменных резисторов, подвижные элементы которых имеют привод упомянутыми датчиками разности давлений, выполненными в виде гидравлического мотора двухстороннего действия диафрагменного типа, рабочие полости которого сообщены с гидравлическим контуром привода средних колес и с гидравлическим контуром привода пары крайних колес.
Для регулирования рабочих объемов гидромоторов в зависимости от наклона машины для повышения ее проходимости система управления гидрообъемной трансмиссией снабжена датчиками продольного и бокового крена машины, имеющими электрическую связь параллельно переменным резисторам корректоров сигналов со средствами изменения рабочего объема гидромоторов, причем электрические средства изменения рабочего объема гидромоторов привода пары крайних колес подключены к датчику продольного крена машины в сторону другой пары крайних колес, а электрические средства изменения рабочего объема гидромоторов привода колес, расположенных вдоль борта машины, подключены к датчику бокового крена машины в сторону противоположного борта.
Для обеспечения равенства давлений в гидравлических контурах после завершения процесса регулирования рабочего объема гидроагрегатов система управления гидрообъемной трансмиссией снабжена двухпозиционными клапанами для сообщения гидролиний гидравлических контуров привода крайних колес с гидролиниями гидравлического контура привода средних колес, имеющими электрические средства управления посредством реле, подключенного параллельно переменным резисторам корректоров сигналов к выходу порогового регулирующего элемента, расположенного в электрической цепи между датчиком частоты вращения вала насосной станции и электрическими средствами изменения рабочего объема гидромоторов.
На фигуре 1 представлена кинематическая схема гидрообъемной трансмиссии полноприводной шестиколесной транспортной машины.
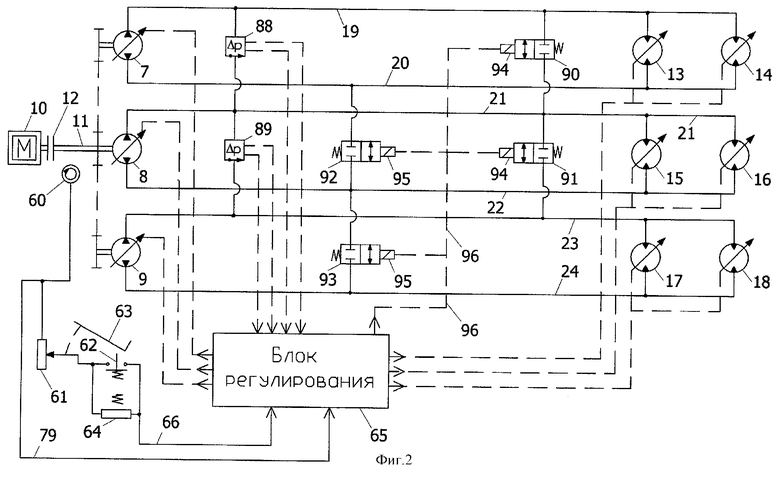
На фигуре 2 показана схема гидрообъемной трансмиссии машины с изображением связей между ее гидравлическими контурами.
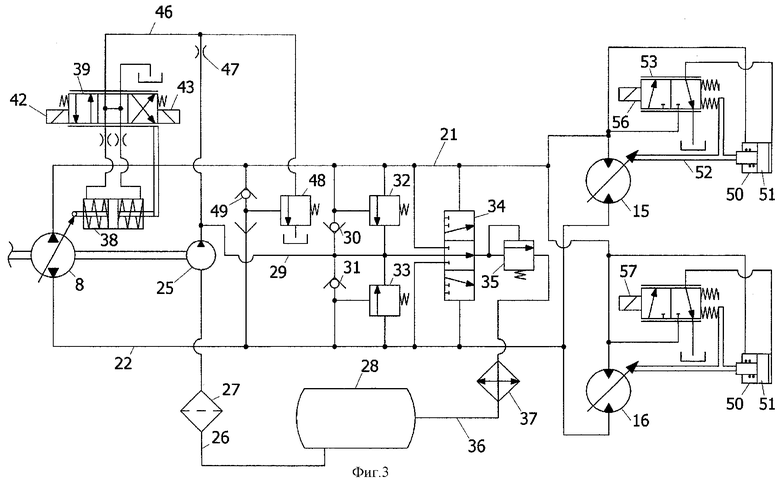
На фигуре 3 показан гидравлический контур привода пары колес машины вместе с используемой в нем гидравлической аппаратурой.
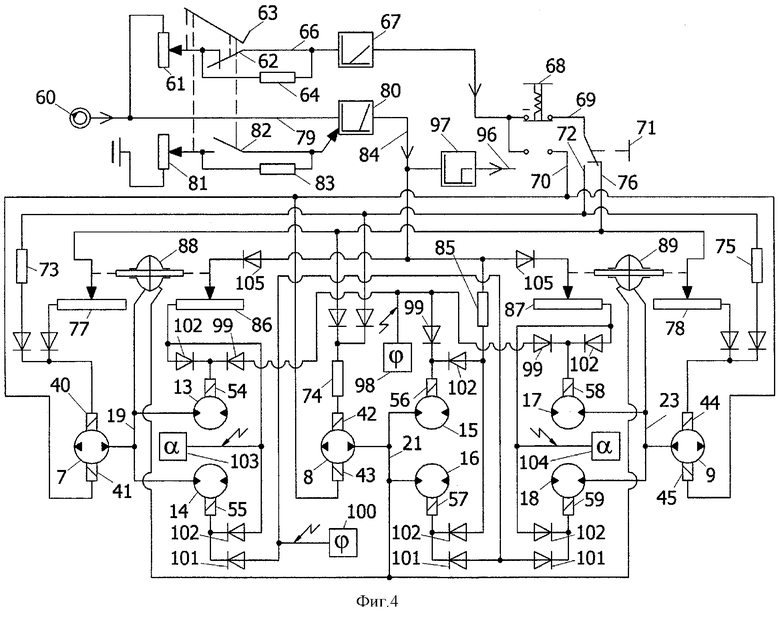
На фигуре 4 показана система управления гидрообъемной трансмиссией машины.
Представленная гидрообъемная трансмиссия многоколесной транспортной машины, имеющей шесть колес 1-6, расположенных парами равномерно вдоль машины (фигуры 1, 2), содержит насосную станцию, состоящую из трех регулируемых реверсивных обратимых аксиально-плунжерных насосов 7-9, имеющих привод от теплового двигателя 10, а именно от двигателя внутреннего сгорания. Валы насосов 7-9 имеют кинематическую связь зубчатыми передачами раздаточного редуктора с ведущим валом 11 насосной станции, который соединен с валом двигателя управляемой фрикционной муфтой 12.
С насосами 7-9 попарно имеют гидравлическую связь регулируемые обратимые аксиально-поршневые гидромоторы 13-18 привода колес машины. С насосом 7 магистральными гидролиниями 19,20, образующими гидравлический контур, связаны гидромоторы 13, 14 привода управляемых передних колес 1, 2 машины. С насосом 8 магистральными гидролиниями 21, 22, образующими другой циркуляционный гидравлический контур, имеют связь гидромоторы 15, 16 привода неуправляемых средних колес 3, 4 машины. С насосом 9 магистральными гидролиниями 23, 24, образующими третий циркуляционный гидравлический контур, связаны гидромоторы 17, 18 привода управляемых задних колес 5, 6 машины. При переднем ходе машины гидролинии 19, 21, 23 являются напорными, то есть гидролиниями высокого давления, а гидролинии 20, 22, 24 являются возвратными, то есть гидролиниями низкого давления.
Каждый гидравлический контур, например гидравлический контур привода средних колес машины (фигура 3), содержит подпиточный насос 25, имеющий привод от ведущего вала 11 насосной станции. Полость всасывания насоса 25 всасывающей гидролинией 26 через фильтр 27 очистки рабочей жидкости сообщена с гидробаком 28. С полостью нагнетания подпиточного насоса сообщена нагнетательная гидролиния 29. Нагнетательная гидролиния 29 имеет гидравлическую связь с магистральными гидролиниями через обратные клапаны 30, 31 для поддержания избыточного давления в гидравлическом контуре. Параллельно обратным клапанам 30, 31 расположены аварийные предохранительные клапаны 32, 33 для перепуска рабочей жидкости в случае ее чрезмерного давления из магистральной гидролинии в гидролинию 29. Нагнетательная гидролиния 29 соединена с одним из входов трехпозиционного перекидного клапана 34, управляемого давлением в магистральных гидролиниях, с которыми соединены два других его входа. Выход клапана 34 через подпорный клапан 35 соединен со сливной гидролинией 36, соединенной через теплообменник 37 с гидробаком 28.
Механизм изменения рабочего объема каждого из насосов 7-9 содержит гидроцилиндр 38 двухстороннего действия и четырехлинейный трехпозиционный с пружинным нульустановителем реверсивный гидрораспределитель 39. Гидрораспределитель 39 имеет управление от двух электромагнитов, которые являются электрическими средствами изменения рабочего объема насоса. Насос 7 имеет электрические средства 40 и 41 (фигура 4) изменения его рабочего объема, насос 8 имеет электрические средства 42, 43 изменения рабочего объема, насос 9 имеет электрические средства 44, 45 изменения рабочего объема. Вход гидрораспределителя 39 питающей гидролинией 46 через дроссель 47 соединен с нагнетательной гидролинией 29. Два выхода гидрораспределителя 39 соединены с рабочими полостями гидроцилиндра 38, расположенными по разные стороны его поршня, а третий его выход сообщен со сливом. Для ограничения максимального давления, создаваемого насосом во время трогания машины, когда расход рабочей жидкости через гидромоторы очень мал, каждый гидравлический контур снабжен отсечным клапаном 48, соединяющим со сливом гидролинию 46, понижая в ней давление рабочей жидкости. Управляющий вход клапана 48 соединен с магистральными гидролиниями через клапан " ИЛИ" 49.
Механизм изменения рабочего объема каждого гидромотора содержит гидроцилиндр 50 с поршнем 51, подпружиненным в сторону поршневой полости. Штоковая полость гидроцилиндра 50 сообщена с той магистральной гидролинией, которая является напорной при переднем ходе машины. Со штоком 52 гидроцилиндра 50 имеет упругую связь запорный элемент трехлинейного двухпозиционного гидрораспределителя 53. Вход гидрораспределителя 53 соединен с магистральной гидролинией, являющейся напорной при переднем ходе машины, а выходы соединены с поршневой полостью гидроцилиндра 50 и со сливом. Каждый гидрораспределитель 53 имеет управление от электромагнита, который является электрическим средством изменения рабочего объема гидромотора. Гидромоторы 13, 14 имеют электрические средства 54, 55 изменения их рабочего объема, гидромоторы 15, 16 снабжены электрическими средствами 56, 57 изменения рабочего объема, гидромоторы 17, 18 имеют электрические средства 58, 59 изменения рабочего объема.
Система управления гидрообъемной трансмиссией содержит датчик 60 частоты вращения ведущего вала 11 насосной станции, создающий электрический сигнал, пропорциональный частоте вращения вала 11. Последовательно с датчиком 60 в электрической цепи между ним и электрическими средствами изменения рабочего объема насосов последовательно расположены переменный резистор 61 и выключатель 62, управляемые педалью 63 управления подачей топлива двигателю 10 машины. Параллельно выключателю 62 расположен резистор 64. Выключатель 62 и резистор 64 подключены к входу блока 65 регулирования насосов и гидромоторов электрической цепью 66. В этой электрической цепи последовательно с выключателем 62 и резистором 64 расположен пороговый регулирующий элемент 67, например, триод, смещающий поступление электрического сигнала от датчика 60 в область более высокой частоты вращения вала насосной станции, превышающей частоту вращения вала двигателя на холостом ходу. Последовательно с пороговым регулирующим элементом 67 расположен селектор 68 с ручным управлением, предназначенный для изменения направления движения машины изменением направления подачи рабочей жидкости под давлением насосами 7-9, обеспечивающий подачу сигнала либо по электрической цепи 69 к электрическим средствам 40, 42, 44 изменения рабочего объема насосов 7-9 для осуществления переднего хода машины, либо по электрической цепи 70 к другим электрическим средствам 41, 43, 45 изменения рабочего объема насосов для осуществления заднего хода машины. В электрической цепи 69 расположен переключатель 71 с ручным приводом для соединения в одной из его позиций электрических средств 40, 42, 44 изменения рабочих объемов насосов 7-9 с селектором 68 через электрическую цепь 72 и постоянные резисторы 73, 74, 75 и для соединения в другой его позиции с селектором 68 электрического средства 42 изменения рабочего объема насоса 8 через резистор 74, а электрических средств 40 и 44 изменения рабочего объема насосов 7 и 9 гидравлических контуров привода крайних колес через электрическую цепь 76 и переменные резисторы 77 и 78, которые являются корректорами сигналов, передаваемых от порогового регулирующего элемента 67 к электрическим средствам изменения рабочих объемов насосов 7 и 9.
В электрической цепи 79, соединяющей с датчиком 60 электрические средства 54-59 изменения рабочего объема гидромоторов 13-18, расположен пороговый регулирующий элемент 80, например, триод, имеющий высокий порог начала передачи сигнала, смещающий его поступление от датчика 60 в область большой частоты вращения вала насосной станции для того, чтобы уменьшение рабочего объема гидромоторов начиналось после окончания увеличения рабочего объема насосов. Причем у порогового регулирующего элемента 80 регулируемый порог начала передачи сигнала от датчика 60, изменяемый педалью 63. Для регулирования этого порога в электрической цепи между источником электрического тока и управляющей сеткой триода расположены переменный резистор 81, например, потенциометр, имеющий привод от оси педали 63, и выключатель 82, замыкаемый педалью 63 в конце ее хода одновременно с размыканием выключателя 62. Параллельно выключателю 82 включен постоянный резистор 83.
С выходом порогового регулирующего элемента 80 электрической цепью 84 соединены электрические средства 54-59 изменения рабочих объемов гидромоторов. Электрические средства 56, 57 изменения рабочих объемов гидромоторов 15 и 16 привода средних колес 3, 4 подключены к пороговому регулирующему элементу 80 через постоянный резистор 85, а электрические средства 54, 55 и 58, 59 изменения рабочего объема гидромоторов 13, 14 и 17, 18 привода крайних колес 1, 2 и 5, 6 подключены к пороговому регулирующему элементу 80 через переменные резисторы 86 и 87, которые являются корректорами сигналов, передаваемых к электрическим средствам изменения рабочих объемов гидромоторов 13, 14 и 17, 18.
Подвижные элементы резисторов 77 и 86 имеют привод от датчика 88 разности давлений в магистральных гидролиниях 19 и 21. Датчик 88 выполнен в виде гидравлического мотора двухстороннего действия диафрагменного типа, осуществляющего привод подвижных элементов резисторов 77 и 86 штоками от мембраны, расположенной в двухполостной камере, одна полость которой сообщена с гидролинией 19 гидравлического контура привода передних колес 1, 2, а другая полость сообщена с гидролинией 21 гидравлического контура привода средних колес 3, 4.
Подвижные элементы переменных резисторов 78, 87 имеют привод от датчика 89 разности давлений в магистральных гидролиниях 21 и 23. Датчик 89 выполнен в виде гидравлического мотора двухстороннего действия диафрагменного типа, имеющего камеру, разделенную мембраной, полость с одной стороны которой сообщена с гидролинией 23 гидравлического контура привода задних колес 5, 6, а полость с другой стороны мембраны сообщена с гидролинией 21 гидравлического контура привода средних колес 3, 4.
Гидрообъемная трансмиссия машины содержит двухпозиционные клапаны 90, 91 для сообщения напорных при переднем ходе машины гидролиний гидравлических контуров привода крайних колес с напорной гидролинией гидравлического контура привода средних колес и двухпозиционные клапаны 92, 93 для сообщения между собой возвратных при переднем ходе машины гидролиний гидравлических контуров. С гидролинией 21 гидравлического контура привода средних колес 3, 4 соединены клапанами 90 и 91 гидролинии соответственно 19 и 23 гидравлических контуров привода передних и задних колес. А с гидролинией 22 гидравлического контура привода средних колес 3, 4 клапанами 92 и 93 соединены гидролинии соответственно 20 и 24 гидравлических контуров привода крайних колес 1, 2 и 5, 6. Клапаны 90, 91 снабжены электрическими средствами 94 управления (электромагнитами или соленоидами), а клапаны 92, 93 снабжены такими же электрическими средствами 95 управления. Для автоматического включения клапанов 90-93 после завершения регулирования гидромоторов они подключены электрической цепью 96 к реле 97, соединенному с выходом порогового регулирующего элемента 80, расположенного в электрической цепи между датчиком 60 и электрическими средствами изменения рабочего объема гидромоторов. Реле 97 может быть выполнено электромагнитным, состоящим из обмотки, подключенной к выходу порогового регулирующего элемента 80, и контакта, расположенного в электрической цепи 96 между электрическими средствами 94, 95 управления клапанами 90-93 и источником электрического тока.
Для регулирования поворотных моментов на колесах машины при ее поперечных наклонах, при которых уменьшается нагрузка на колеса приподнятого борта и становится возможным нежелательное их буксование в случае слабого сцепления с грунтом, система управления гидрообъемной трансмиссией снабжена датчиком 98 поперечного крена машины в сторону левого борта, к которому через диоды 99 подключены электрические средства 54, 56, 58 изменения рабочих объемов гидромоторов 13, 15, 17 привода колес, расположенных вдоль правого борта, и датчиком 100 поперечного крена машины в сторону правого борта, к которому через диоды 101 подключены электрические средства 55, 57, 59 изменения рабочих объемов гидромоторов 14, 16, 18 привода колес, расположенных вдоль левого борта. Для локализации сигнала, передаваемого датчиками 98, 100 поперечного крена машины, электрические средства 54-59 изменения рабочего объема всех гидромоторов имеют связь с пороговым регулирующим элементом 80 через отдельные диоды 102.
Так как электрические средства изменения рабочего объема гидромоторов 13, 15, 17, расположенных вдоль правого борта, подключены непосредственно к датчику 98 поперечного крена машины влево, а электрические средства изменения рабочего объема гидромоторов 14, 16, 18, расположенных вдоль левого борта, подключены к датчику 100 поперечного крена машины вправо, то обеспечено автоматическое снижение поворотного момента на колесах, расположенных вдоль приподнятого борта, при поперечных наклонах машины для предотвращения их буксования в случае слабого сцепления с грунтом.
Для уменьшения поворотного момента (силы тяги) на передних колесах машины при выезде ее из брода на реке или из оврага передним ходом, во время которого нагрузка на передние колеса от веса машины существенно уменьшается и становится возможным нежелательное их буксование с потерей нужного сцепления с грунтом, система управления гидрообъемной трансмиссией снабжена датчиком 103 продольного крена машины в сторону ее задка, имеющим электрическую связь параллельно переменному резистору 86 со средствами 54, 55 изменения рабочего объема гидромоторов 13, 14 привода передних колес 1, 2. А для уменьшения поворотного момента на задних колесах 5, 6 в случае выезда из реки или оврага задним ходом система управления снабжена датчиком 104 продольного крена машины в сторону ее передка, имеющим электрическую связь параллельно переменному резистору 87 со средствами 58, 59 изменения рабочего объема гидромоторов 17, 18 привода задних колес. При этом для локализации электросигнала, передаваемого датчиками 103, 104 продольного крена машины, между выходом порогового регулирующего элемента 80 и переменными резисторами 86, 87 расположены диоды 105.
Так как электрические средства изменения рабочего объема гидромоторов 13, 14 привода передних колес 1, 2 подключены непосредственно к датчику 103 продольного крена машины в сторону ее задка, а электрические средства регулирования рабочего объема гидромоторов 17, 18 привода задних колес 5, 6 подключены к датчику 104 продольного крена машины в сторону ее передка, то обеспечено автоматическое снижение поворотного момента на передних колесах во время подъема машины передним ходом по крутому склону и автоматическое снижение поворотного момента на задних колесах при выезде машины из оврага задним ходом для предотвращения буксования колес в случае слабого их сцепления с грунтом.
Датчики 98, 100 и 103, 104 крена машины могут быть выполнены в виде горизонтально расположенной трубки с жидкостью, например с ртутью, заключенной между мембранами, взаимодействующими с пьезоэлементами, подключенными через преобразователи к блоку сравнения, выдающему при наклоне трубки электрический сигнал, пропорциональный углу наклона машины.
Насосы 7-9 при малой частоте вращения двигателем ведущего вала 11 насосной станции имеют нулевой рабочий объем и поэтому не создают давление в гидравлических контурах. При этом рабочий объем гидромоторов перед троганием машины максимальный. Для движения машины нажатием на педаль 63 подачи топлива увеличивают частоту вращения вала двигателя 10 и соответственно ведущего вала 11 насосной станции. Датчик 60 частоты вращения вала 11 подает электрический сигнал через переменный резистор 61 и выключатель 62 по электрической цепи 66 к пороговому регулирующему элементу 67. Когда величина поступающего сигнала становится больше установленного порога, сигнал от порогового регулирующего элемента 67 через селектор 68 по электрическим цепям 69, 76 через переключатель 71 и резисторы 77, 74, 78 поступает к электрическим средствам 40, 42, 44 изменения рабочего объема насосов. Чем больше частота вращения вала 11, тем больше величина сигнала (напряжения электрического тока), создаваемого датчиком 60, и, значит, тем значительнее величина электрического сигнала, поступающего от порогового регулирующего элемента 67, обеспечивая увеличение рабочего объема насосов. При этом во время трогания машины, пока частота вращения колес мала и, значит, расход рабочей жидкости через гидромоторы мал, давление, создаваемое насосами 7-9 в напорных гидролиниях 19, 21, 23, получается очень большим. Тогда в каждом гидравлическом контуре отсечный клапан 48, сообщая со сливом гидролинию 46, питающую через гидрораспределитель 39 гидроцилиндры 38, понижает давление в ней и тем самым ограничивает увеличение рабочего объема насоса и, значит, количество подаваемой им жидкости. Причем величина рабочего объема насосов зависит также от величины перемещения педали 63, изменяющего сопротивление резистора 61 и, значит, величину сигнала, поступающего к электрическим средствам изменения рабочего объема насосов, для обеспечения работы двигателя при частичной и полной нагрузке на экономичном режиме.
Когда частота вращения вала двигателя по мере разгона машины достигает величины, при которой насосы имеют максимальный рабочий объем, сигнал, поступающий от датчика 60, становится достаточным, чтобы преодолеть порог, установленный пороговым регулирующим элементом 80, и тогда сигнал по электрической цепи 79 через резисторы 85-87 проходит к электрическим средствам 54-59 изменения рабочих объемов гидромоторов. Под действием этих электрических средств распределители 53, включаясь в работу, направляют рабочую жидкость под давлением в поршневую полость гидроцилиндров 50, перемещая шток 52. При перемещении штока 52 в сторону штоковой полости гидроцилиндра 50 рабочий объем гидромоторов по мере роста частоты вращения вала двигателя и соответственно увеличения скорости движения машины уменьшается.
Для обеспечения динамичного разгона машины педалью 63 нажимают на подвижный элемент выключателя 62, размыкая его контакт, и тогда вследствие прохождения электрического сигнала через резистор 64 величина этого сигнала, поступающего от датчика 60, с ростом частоты вращения вала двигателя увеличивается в меньшей степени. В результате в этом случае рабочий объем насосов достигает максимальной величины при большой частоте вращения вала двигателя, когда двигатель развивает большую мощность, при этом давление, создаваемое насосами в напорных гидролиниях, получается больше. Кроме того, в данном случае вследствие замыкания педалью 63 контакта выключателя 82 увеличивается ступенчато напряжение на сетке триода, образующего собой пороговый регулирующий элемент 80, отчего уменьшение рабочего объема гидромоторов и, значит, понижение передаваемого ими к колесам машины поворотного (крутящего) момента начинается при большей частоте вращения вала двигателя. Поэтому при размыкании педалью 63 выключателя 62 и замыкании выключателя 82 ускорение машины происходит интенсивнее.
С помощью датчиков 88, 89 во время движения машины передним ходом производится сопоставление давления в напорных гидролиниях 19, 23 гидравлических контуров привода крайних колес 1, 2 и 5, 6 с давлением в напорной гидролинии 21 гидравлического контура привода средних колес.Если величина давлений в них по какой-либо причине оказывается разной, то под действием получающейся разности давлений датчики 88, 89 изменяют сопротивление переменных резисторов 77, 78 и 86, 87, изменяя величину сигнала, поступающего к электрическим средствам изменения рабочих объемов насосов или гидромоторов. Так, если давление в гидролинии 19 гидравлического контура привода передних колес 1, 2 оказывается меньше давления в гидролинии 21 гидравлического контура привода средних колес 3, 4, то датчик 88 перемещает штоками подвижные элементы переменных резисторов 77 и 86, уменьшая их сопротивление. При уменьшении сопротивления резисторов 77, 86 величина сигнала, поступающего к электрическим средствам 40 изменения рабочего объема насоса 7 и к электрическим средствам 54, 55 изменения рабочего объема гидромоторов 13, 14, увеличивается. Происходит либо увеличение рабочего объема насоса 7, либо уменьшение рабочего объема гидромоторов 13, 14. В результате давление в гидролинии 19 становится больше и происходит его уравнивание с давлением в гидролинии 21. Если же давление в гидролинии 19 оказывается больше давления в гидролинии 21, то датчик 88 перемещает подвижные элементы резисторов 77 и 86 в обратную сторону, увеличивая их сопротивление. Тогда величина сигнала, поступающего к электрическим средствам изменения рабочего объема насоса 7 и гидромоторов 13, 14, уменьшается. Происходит либо уменьшение рабочего объема насоса 7, либо увеличение рабочего объема гидромоторов 13, 14 до тех пор, пока давление в гидролинии 19 не понизится до величины, равной величине давления в гидролинии 21. Аналогичным образом с помощью датчика 89 и имеющих от него привод переменных резисторов 78 и 87 происходит уравнивание давления в гидролинии 23 гидравлического контура привода задних колес 5, 6 с давлением в гидролинии 21. При максимальном рабочем объеме гидромоторов, когда сигнал от порогового регулирующего элемента 80 к электрическим средствам изменения их рабочего объема еще не поступает, уравнивание давлений в напорных гидролиниях 19, 21, 23 производится изменением рабочего объема насосов 7, 9 путем изменения датчиками 88, 89 сопротивления переменных резисторов 77 и 78. Когда рабочий объем насосов 7-9 при увеличении частоты вращения вала двигателя достигает максимальной величины, уравнивание давлений в напорных гидролиниях 19, 23 с давлением в гидролинии 21 осуществляется изменением рабочего объема гидромоторов 13, 14 и 17, 18 путем изменения теми же датчиками 88, 89 сопротивления переменных резисторов 86, 87, изменяющих величину сигнала, поступающего к электрическим средствам 54, 55 и 58, 59 изменения рабочего объема этих гидромоторов.
Когда сигнал, поступающий от порогового регулирующего элемента 80 к электрическим средствам 54-59 изменения рабочего объема гидромоторов 13-18, при увеличении частоты вращения вала двигателя достигает такой величины, при которой рабочий объем гидромоторов становится минимальным и, значит, завершается процесс регулирования гидроагрегатов, происходит включение реле 97 и передача сигнала от него по электрической цепи 96 к электрическим средствам 94, 95 управления клапанами 90-93. При поступлении электрического сигнала клапаны 90, 91 сообщают гидролинии 19, 23 гидравлических контуров привода управляемых передних и задних колес с гидролинией 21 гидравлического контура привода средних колес, а клапаны 92, 93 соединяют между собой возвратные гидролинии 20, 22, 24. После сообщения между собой упомянутых гидролиний рабочая жидкость свободно проходит из гидравлического контура привода средних колес в гидравлические контуры привода крайних колес и обратно при движении машины по извилистой дороге с крутыми поворотами, когда средние и крайние колеса катятся по траекториям разной длины. Вследствие возможности свободного перетекания рабочей жидкости давление во всех трех гидравлических контурах получается одинаковым.
При замедлении машины из-за увеличения сопротивления ее движению и соответственно уменьшении частоты вращения вала двигателя, когда сигнал, поступающий от порогового регулирующего элемента 80 к электрическим средствам 54-59 изменения рабочего объема гидромоторов, становится меньше величины, установленной реле 97, поступление сигнала к двухпозиционным клапанам 90-93 прекращается, и они разобщают гидравлические контуры, а электрические средства 54-59, получая электрический сигнал пониженной величины, начинают действия по увеличению рабочего объема гидромоторов для увеличения поворотного момента на колесах машины. Во время увеличения рабочего объема гидромоторов датчики 88, 89 производят коррекцию сигналов, поступающих к электрическим средствам 54, 55 и 58, 59 изменения рабочего объема гидромоторов 13, 14 и 17, 18 привода крайних колес, для обеспечения равенства давлений во всех гидравлических контурах. А после того, как рабочий объем гидромоторов по мере его увеличения становится максимальным, происходит уменьшение рабочего объема насосов и повышение создаваемого ими давления.
При подъеме машины на холм или выезде из реки на берег после преодоления брода, когда происходит перераспределение нагрузки на колеса, при котором нагрузка на передние колеса 1, 2 становится меньше, а на задние колеса 5, 6 получается больше, датчик 103 продольного крена машины посылает электрический сигнал к электрическим средствам 54, 55 изменения рабочего объема гидромоторов 13, 14 привода передних колес, вследствие чего рабочий объем этих гидромоторов уменьшается. Соответственно становится меньше поворотный момент на передних колесах 1, 2, а поворотный момент на остальных колесах машины получается больше из-за возрастания давления в гидравлических контурах. Это уменьшает вероятность буксования передних колес при указанных условиях движения машины. Аналогично с помощью датчика 104 уменьшается рабочий объем гидромоторов привода задних колес в случае, например, выезда машины из оврага задним ходом.
При движении машины поперек холма с креном, например, влево, когда нагрузка от веса машины на колеса, расположенные у правого борта, уменьшается, датчик 98 поперечного крена посылает электросигнал к электрическим средствам 54, 56, 58 изменения рабочего объема гидромоторов 13, 15, 17 привода колес 2, 4, 6, расположенных вдоль правого борта, отчего рабочий объем этих гидромоторов уменьшается и соответственно становится меньше передаваемый ими поворотный момент. Причем, так как мощность двигателя остается при этом прежней, то происходит увеличение давления в гидравлических контурах и соответственно возрастание поворотного момента на колесах 1, 2, 3, расположенных вдоль левого борта, на которые при крене машины влево нагрузка от веса машины получается больше. Аналогичным образом с помощью датчика 100 происходит изменение поворотного момента на колесах, расположенных вдоль левого борта, при наклоне машины вправо.
Таким образом, с помощью датчиков 103, 104 продольного крена машины и датчиков 98, 100 поперечного ее крена обеспечено непрерывное регулирование поворотного момента (силы тяги) на колесах машины при ее продольных и поперечных наклонах при движении по холмистой и вообще по пересеченной местности, что повышает ее проходимость.
При переезде машины через канаву или траншею выключателем 71 электрические средства 40, 42, 44 изменения рабочего объема насосов через постоянные резисторы 73, 74, 75 соединяют непосредственно с селектором 68 для предотвращения снижения поворотных моментов на крайних колесах при вывешивании над канавой средних колес.
Для движения машины задним ходом селектором 68 подают электрический сигнал от порогового регулирующего элемента 67 по электрической цепи 70 к электрическим средствам 41, 43, 45 изменения рабочего объема насосов 7-9 и тогда эти реверсивные насосы подают рабочую жидкость к гидромоторам под давлением по гидролиниям 20, 22, 24, которые в этом случае становятся напорными, а гидролинии 19, 21, 23 становятся возвратными.
Таким образом, с помощью пороговых регулирующих элементов 67 и 80, имеющих разные пороги начала передачи сигнала от датчика 60 частоты вращения ведущего вала насосной станции, производится последовательное четкое регулирование насосов и гидромоторов, вследствие чего исключено наложение погрешностей в регулировании этих гидроагрегатов и тем самым обеспечено четкое изменение их рабочих объемов. Причем вследствие того, что у порогового регулирующего элемента 69 принудительно изменяемая педалью 63 сначала постепенно и затем скачком крутизна характеристики, а пороговый регулирующий элемент 80 в цепи 84 передачи электрического сигнала к электрическим средствам 54-59 изменения рабочего объема гидромоторов имеет изменяемый педалью 63 порог начала передачи сигнала, при нажатии на педаль 63 сначала постепенно изменяемый ею, а затем увеличивающийся скачком при срабатывании выключателя 82, то обеспечена работа двигателя в зависимости от условий движения машины либо, в основном, на экономичном режиме, либо на режиме большой мощности для быстрого разгона машины. При этом на всех режимах обеспечена равная нагрузка на гидроагрегаты всех трех гидравлических контуров трансмиссии вследствие наличия корректоров сигналов, передаваемых к электрическим средствам изменения рабочего объема насоса и гидромоторов привода каждой пары крайних колес, выполненных в виде переменных резисторов, подвижные элементы которых имеют привод от датчиков разности давлений в гидравлическом контуре привода средних колес и в гидравлическом контуре привода пары крайних колес, и наличия двухпозиционных клапанов, автоматически соединяющих между собой все гидравлические контуры после завершения регулирования рабочих объемов насосов и гидромоторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ КОЛЕСНОЙ МАШИНЫ | 2004 |
|
RU2264571C1 |
| МНОГОКОНТУРНАЯ ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2006 |
|
RU2309056C1 |
| ТРАНСМИССИЯ ГИДРОХОДА | 2004 |
|
RU2271943C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФРИКЦИОННОЙ МУФТОЙ ПРИВОДА НАСОСНОЙ СТАНЦИИ ГИДРООБЪЕМНОЙ ТРАНСМИССИИ ГИДРОХОДА | 2004 |
|
RU2271944C1 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ С УПРАВЛЯЕМОЙ ФРИКЦИОННОЙ МУФТОЙ ПРИВОДА НАСОСНОЙ СТАНЦИИ | 2005 |
|
RU2280796C1 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ | 2003 |
|
RU2256564C1 |
| Гидрообъемная трансмиссия для многоприводного транспортного средства | 2018 |
|
RU2692298C1 |
| Гидрообъемная трансмиссия с объемным делителем для многоприводного транспортного средства | 2018 |
|
RU2683984C1 |
| СИСТЕМА КОНТРОЛЯ ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИИ МАШИНЫ | 2013 |
|
RU2545144C2 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в управлении насосами и гидромоторами гидрооъемной трансмиссии многоколесной транспортной машины. Система управления гидрообъемной трансмиссией многоколесной транспортной машины, имеющей шесть колес с приводом от регулируемых гидромоторов 13-18, связанных гидролиниями с насосной станцией, состоящей из трех регулируемых насосов, содержит электрические средства изменения рабочего объема насосов и гидромоторов и датчик 60 частоты вращения вала насосной станции. В электрической цепи между датчиком 60 и электрическими средствами 40-45 изменения рабочего объема насосов расположены переменный резистор 61 и выключатель 62, управляемые педалью 63 подачи топлива двигателю, резистор 64, включенный параллельно выключателю, и пороговый регулирующий элемент 67. В электрической цепи между датчиком и электрическими средствами 54-59 изменения рабочего объема гидромоторов расположен пороговый регулирующий элемент 80 с изменяемым педалью 63 порогом. Технический результат - обеспечение четкого регулирования насосов и гидромоторов многоконтурной гидрообъемной трансмиссии при экономичном и динамичном режимах движения с обеспечением одинаковой нагрузки на гидроагрегаты путем коррекции сигналов, передаваемых к электрическим средствам изменения рабочего объема насосов и гидромоторов гидравлических контуров привода крайних колес. 3 з.п. ф-лы, 4 ил.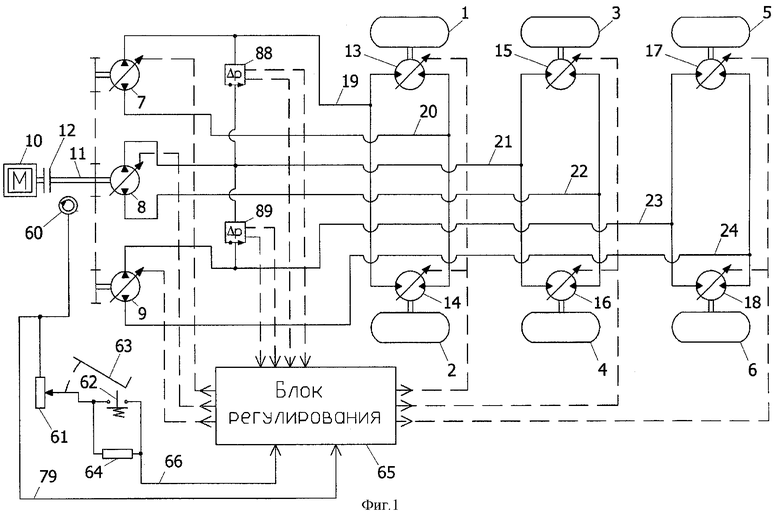
| Система управления многоосным транспортным средством | 1980 |
|
SU1065251A1 |
| СПОСОБ СОДЕЙСТВИЯ ДВИЖЕНИЮ И УСТРОЙСТВО СОДЕЙСТВИЯ ДВИЖЕНИЮ | 2017 |
|
RU2741130C1 |
| Теплообменник с псевдоожиженным слоем | 1971 |
|
SU468956A1 |
| Мусоровоз | 1981 |
|
SU1020314A1 |
| ЕР 0736708 A1, 09.10.1996. | |||

