Область техники
[0001]
Настоящее изобретение относится к способу содействия движению и устройству содействия движению.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известна технология, которая предписывает транспортному средству двигаться вручную во время движения вблизи перекрестка, например, определяет, движется ли транспортное средство в предполагаемой полосе движения посредством автоматического вождения при въезде на участок, позволяющий транспортному средству двигаться автономно, и начинает автоматическое вождение, когда транспортное средство определено как движущееся в предполагаемой полосе движения (см. патентный документ 1).
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: Непрошедшая экспертизу японская патентная публикация № 2016-050901
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Транспортное средство, движущееся в предполагаемой полосе движения, все еще может вызывать неправильное поведение, когда текущий путь движения переключается на путь движения на основе карты высокой четкости для автоматического вождения, если текущий путь движения отклоняется от пути движения на основе карты высокой четкости в соответствующей полосе движения.
[0005]
Чтобы решить вышеупомянутую традиционную проблему, настоящее изобретение предоставляет способ содействия движению и устройство содействия движению, позволяющие транспортному средству предотвращать неправильное поведение при переключении с пути движения, по которому транспортное средство в настоящее время движется, на путь движения на основе карты высокой четкости.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Аспект настоящего изобретения обеспечивает устройство содействия движению и способ содействия движению для обнаружения окружения рассматриваемого транспортного средства, генерирования первого пути движения на основе упомянутого окружения и выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения, причем устройство содействия движению и способ содействия движению выполнены с возможностью генерирования второго пути движения на основе информации карты высокой четкости вблизи окрестности рассматриваемого транспортного средства, определения того, имеют ли первый путь движения и второй путь движения сходство, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство.
[0007]
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
ФИГ. 1 является блок-схемой, иллюстрирующей устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения;
ФИГ. 2А является принципиальной схемой, иллюстрирующей случай переключения путей движения при смене полос движения;
ФИГ. 2B является принципиальной схемой, продолженной с фиг. 2А, иллюстрирующей случай переключения путей движения;
ФИГ. 2C является принципиальной схемой, продолженной с фиг. 2B, иллюстрирующей случай переключения путей движения;
ФИГ. 3 является принципиальной схемой, иллюстрирующей пример обработки определения сходства;
ФИГ. 4 является принципиальной схемой, иллюстрирующей пример обработки определения сходства;
ФИГ. 5 является принципиальной схемой, иллюстрирующей пример обработки определения сходства;
ФИГ. 6А является принципиальной схемой, иллюстрирующей случай переключения путей движения при повороте;
ФИГ. 6B является принципиальной схемой, продолженной с фиг. 6А, иллюстрирующей случай переключения путей движения;
ФИГ. 6C является принципиальной схемой, продолженной с фиг. 6B, иллюстрирующей случай переключения путей движения;
ФИГ. 7 является принципиальной схемой, иллюстрирующей пример обработки определения сходства при выполнении поворота;
ФИГ. 8 является принципиальной схемой, иллюстрирующей случай переключения путей движения при замедлении;
ФИГ. 9А является принципиальной схемой, иллюстрирующей профиль скорости первого пути движения и второго пути движения;
ФИГ. 9B является принципиальной схемой, иллюстрирующей пример обработки определения сходства при замедлении;
ФИГ. 10 является блок–схемой, иллюстрирующей способ содействия движению в соответствии с вариантом осуществления настоящего изобретения;
ФИГ. 11А является принципиальной схемой, иллюстрирующей случай переключения путей движения на перекрестке;
ФИГ. 11B является принципиальной схемой, продолженной с фиг. 11А, иллюстрирующей случай переключения путей движения;
ФИГ. 12А является принципиальной схемой, иллюстрирующей случай переключения путей движения при выполнении поворота;
ФИГ. 12B является принципиальной схемой, продолженной с фиг. 12А, иллюстрирующей случай переключения путей движения;
ФИГ. 13А является принципиальной схемой, иллюстрирующей случай переключения путей движения при смене полос движения; и
ФИГ. 13B является принципиальной схемой, продолженной с фиг. 13А, иллюстрирующей случай переключения путей движения.
Описание вариантов осуществления
[0009]
В дальнейшем вариант осуществления согласно настоящему изобретению будет описан со ссылкой на чертежи. В описаниях чертежей ниже одинаковые или похожие элементы обозначены одинаковыми или похожими ссылочными позициями. Следует понимать, что чертежи проиллюстрированы схематично, а не в масштабе. Описанный ниже вариант осуществления иллюстрирует устройство и способ для воплощения технических идей настоящего изобретения, которые не предназначены для ограничения структурами или компоновками элементов, как описано в данном документе. Технические идеи настоящего изобретения должны охватывать различные модификации, попадающие в объем изобретения, как определено в прилагаемой формуле изобретения.
[0010]
(Устройство содействия движению)
Устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения установлено на транспортном средстве (в дальнейшем транспортное средство, на котором установлено устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения, называется «рассматриваемым транспортным средством»). Устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения может выполнять обработку содействия движению, включая автономное вождение, которое управляет рассматриваемым транспортным средством для автономного движения по пути движения, и руководство, чтобы побудить водителя предписывать рассматриваемому транспортному средству двигаться вдоль пути движения. Автономное вождение включает в себя как случаи выполнения всех операций вождения, торможения и рулевого управления рассматриваемого транспортного средства без участия пользователя (водителя), вовлеченного в какую-либо операцию, так и выполнения по меньшей мере одной из операций вождения, торможения и рулевого управления. Автономное вождение может выполнять любое из управления следованием за предшествующим транспортным средством, управления расстоянием до транспортного средства и управления предотвращением отклонения с полосы движения, например. Ручное вождение относится к состоянию вождения с помощью операций водителя, в то время как устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения не выполняет какие-либо операции вождения, торможения и рулевого управления на рассматриваемом транспортном средстве.
[0011]
Устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения включает в себя устройство 1 определения переключения пути движения (схема обработки), датчик 2 транспортного средства, датчик 3 периферии, запоминающее устройство 4, пользовательский интерфейс (I/F) 5, исполнительный механизм 6 и устройство 7 управления транспортным средством. Схема 1 обработки, датчик 2 транспортного средства, датчик 3 периферии, запоминающее устройство 4, пользовательский I/F 5, исполнительный механизм 6 и устройство 7 управления транспортным средством могут связываться друг с другом для передачи и приема данных и сигналов проводным способом, таким как шина сети контроллеров (CAN), или беспроводным способом.
[0012]
Датчик 2 транспортного средства обнаруживает текущее положение и состояние движения рассматриваемого транспортного средства. Датчик 2 транспортного средства включает в себя приемник 21 глобальной навигационной спутниковой системы (GNSS), датчик 22 скорости транспортного средства, датчик 23 ускорения и гироскопический датчик (гиродатчик) 24. Типы и количество датчиков 2 транспортного средства не ограничиваются вышеуказанным случаем. Приемник 21 GNSS является, например, приемником системы глобального позиционирования (GPS), который принимает радиоволны от множества навигационных спутников для получения текущего положения рассматриваемого транспортного средства и выводит полученное текущее положение рассматриваемого транспортного средства в схему 1 обработки. Датчик 22 скорости транспортного средства обнаруживает скорость вращения колеса рассматриваемого транспортного средства, обнаруживает скорость транспортного средства на основании обнаруженной скорости вращения колеса и выводит обнаруженную скорость транспортного средства в схему 1 обработки. Датчик 23 ускорения обнаруживает ускорение в направлении вперед-назад рассматриваемого транспортного средства и, например, в направлении ширины транспортного средства и выводит обнаруженное ускорение в схему 1 обработки. Гиродатчик 24 обнаруживает угловую скорость рассматриваемого транспортного средства и выводит обнаруженную угловую скорость в схему 1 обработки.
[0013]
Датчик 3 периферии обнаруживает окружение (окружающие условия) рассматриваемого транспортного средства, включая состояния передней стороны рассматриваемого транспортного средства. Датчик 3 периферии включает в себя камеру 31, радар 32 и устройство 33 связи. Типы и количество датчиков 3 периферии не ограничиваются вышеуказанным случаем. Камера 31 может быть, например, ПЗС–камерой. Камера 31 может быть либо монокулярной камерой, либо стереокамерой. Камера 31 захватывает окружение рассматриваемого транспортного средства, обнаруживает данные окружения рассматриваемого транспортного средства из захваченного изображения, включая относительное положение между рассматриваемым транспортным средством и объектом, таким как транспортные средства (другие транспортные средства), такие как предшествующее транспортное средство, пешеход или велосипед, расстояние между объектом и рассматриваемым транспортным средством, и структуру дороги, такую как границы полосы движения (белые линии) на дороге, и выводит обнаруженные данные окружения в схему 1 обработки.
[0014]
Радар 32 может быть радаром миллиметрового диапазона, ультразвуковым радаром или лазерным дальномером (LRF), например. Радар 32 обнаруживает данные окружения рассматриваемого транспортного средства, такие как относительное положение между объектом и рассматриваемым транспортным средством, расстояние между объектом и рассматриваемым транспортным средством и относительную скорость между объектом и транспортным средством, и выводит обнаруженные данные окружения в схему 1 обработки. Устройство 33 связи принимает данные окружения, такие как положения других транспортных средств и скорости других транспортных средств, посредством связи между транспортными средствами с другими транспортными средствами, связи между транспортными средствами и дорогой с блоком на стороне дороги или связи с информационным центром дорожного движения, например, и выводит обнаруженные данные окружения в схему 1 обработки.
[0015]
Запоминающее устройство 4 может быть, например, полупроводниковым запоминающим устройством, магнитным запоминающим устройством или оптическим запоминающим устройством и может быть включено в схему 1 обработки. Запоминающее устройство 4 включает в себя блок 41 хранения информации карты навигации для хранения информации карты для навигации (в дальнейшем называемой «информацией карты навигации») и блок 42 хранения информации карты высокой четкости для хранения информации карты высокой четкости. База данных информации карты навигации и информации карты высокой четкости может управляться на сервере, и данные разницы информации карты навигации и информации карты высокой четкости после обновления могут быть получены посредством телематики, чтобы обновить информацию карты навигации, хранящуюся в блоке 41 хранения информации карты навигации, и информацию карты высокой четкости, хранящуюся в блоке 42 хранения информации карты высокой четкости. Альтернативно, информация карты навигации и информация карты высокой четкости могут быть получены посредством связи между транспортными средствами или связи между транспортными средствами и дорогой в зависимости от положения, в котором движется рассматриваемое транспортное средство. Использование телематики (связь между транспортными средствами или связь между транспортными средствами и дорогой) устраняет необходимость хранения информации карты навигации и информации карты высокой четкости, требующей большого объема данных, с тем чтобы сохранить объем памяти. Использование телематики (связь между транспортными средствами или связь между транспортными средствами и дорогой) дополнительно позволяет получать информацию карты навигации и информацию карты высокой четкости, подлежащую обновлению, чтобы точно распознавать фактические условия движения, такие как изменение структуры дороги и наличие или отсутствие ремонта или строительства дороги. Использование телематики (связь между транспортными средствами или связь между транспортными средствами и дорогой) также позволяет получать точную информацию карты навигации и информацию карты высокой четкости, сгенерированную на основе данных, собранных от множества транспортных средств, помимо рассматриваемого транспортного средства.
[0016]
Информация карты навигации, хранящаяся в блоке 41 хранения информации карты навигации, включает в себя фрагменты информации для каждой дороги. Примеры информации для каждой дороги, включенной в информацию карты навигации, включают в себя дорожные узлы, указывающие опорные точки на опорной линии дороги (например, осевой линии дороги), и дорожные межсоединения, указывающие аспекты участков между соответствующими дорожными узлами. Информация о дорожных узлах включает в себя соответствующий идентификационный номер, позиционные координаты, количество дорожных межсоединений, с которыми необходимо соединиться, и идентификационный номер соответствующих дорожных межсоединений, с которыми необходимо соединиться. Информация о дорожных межсоединениях включает в себя соответствующий идентификационный номер, атрибут дороги, длину межсоединения, количество полос движения, ширину дороги и ограничение скорости. Информация карты навигации не включает в себя информацию о полосе движения. Предполагается, что информация карты навигации, хранящаяся в блоке 41 хранения информации карты навигации, не включает в себя информацию для каждой полосы движения, которая является более конкретной, чем информация для каждой дороги.
[0017]
Информация карты высокой четкости, хранящаяся в блоке 42 хранения информации карты высокой четкости, является информацией карты более точной, чем информация карты навигации, и включает в себя фрагменты информации для каждой полосы движения, более конкретной, чем информация для каждой дороги. Примеры информации для каждой полосы движения, включенной в информацию карты высокой четкости, включают в себя узлы полос движения, указывающие опорные точки на контрольной линии полосы движения (например, среднюю линию в полосе движения), и межсоединения полос движения, указывающие аспекты участков между соответствующими узлами полос движения. Информация об узлах полос движения включает в себя соответствующий идентификационный номер, позиционные координаты, количество межсоединений полос движения, с которыми необходимо соединиться, и идентификационный номер соответствующих межсоединений полос движения, с которыми необходимо соединиться. Информация о межсоединениях полос движения включает в себя соответствующий идентификационный номер, тип полосы движения, ширину полосы движения, тип границы полосы движения, форму полосы движения, а также форму опорной линии полосы движения. Информация карты высокой четкости дополнительно включает в себя информацию об объектах на земле, такую как тип и позиционные координаты объектов на земле, включая светофор, линию остановки, знак, здание, телеграфный столб, бордюр и пешеходный переход, присутствующий на полосах движения или вблизи них, и идентификационный номер каждого узла полос движения и идентификационный номер каждого межсоединения полос движения, соответствующие позиционным координатам объектов на земле.
[0018]
Поскольку карта высокой четкости включает в себя информацию об узлах и межсоединениях для каждой полосы движения, может быть указана полоса, в которой рассматриваемое транспортное средство в настоящее время движется по пути движения. Карта высокой четкости имеет координаты, указывающие каждое положение в направлении расширения и направлении ширины каждой полосы движения. Карта высокой четкости также имеет координаты, указывающие каждое положение в трехмерном пространстве (например, долготу, широту и высоту), и каждая полоса движения и вышеуказанные объекты на земле могут быть указаны соответствующими формами в трехмерном пространстве.
[0019]
Схема 1 обработки и устройство 7 управления транспортным средством каждое служат в качестве контроллера, такого как электронный блок управления (ECU), для выполнения операций арифметической логики, необходимых для соответствующих операций устройства содействия движению в соответствии с вариантом осуществления настоящего изобретения, и могут включает в себя процессор, запоминающее устройство и I/F ввода-вывода. Процессор может представлять собой микропроцессор, эквивалентный центральному процессору (CPU), например, включающий в себя арифметико-логический блок (ALU), схему управления (устройство управления) и различные типы регистров. Внутреннее или внешнее запоминающее устройство, включенное в каждую из схемы 1 обработки и устройства 7 управления транспортным средством, может быть, например, полупроводниковым запоминающим устройством или дисковым носителем и может включать в себя регистр, кэш-память и носитель данных, такой как ROM или RAM в качестве основного запоминающего устройства. Например, процессор может выполнять программу (программу содействия движению), предварительно сохраненную в запоминающем устройстве и включающую в себя последовательность обработки, необходимую для операций устройства содействия движению в соответствии с вариантом осуществления настоящего изобретения.
[0020]
Схема 1 обработки включает в себя логические блоки в качестве функциональных или физических аппаратных ресурсов, таких как блок 11 генерирования первого пути, блок 12 генерирования второго пути, блок 13 сравнения путей, блок 14 получения скорости транспортного средства, блок 15 сравнения скорости, блок 16 переключения пути и блок 17 управления представлением. Эти логические блоки могут физически реализовывать программируемое логическое устройство (PLD), такое как программируемая полем вентильная матрица (FPGA), или могут реализовывать функциональную логическую схему, эквивалентно заданную путем обработки программного обеспечения в полупроводниковой интегральной схеме общего назначения.
[0021]
Блок 11 генерирования первого пути, блок 12 генерирования второго пути, блок 13 сравнения путей, блок 14 получения скорости транспортного средства, блок 15 сравнения скорости, блок 16 переключения пути и блок 17 управления представлением, включенные в схему 1 обработки могут быть реализованы одним элементом аппаратного обеспечения, или каждый может быть реализован отдельным аппаратным обеспечением. Устройство 7 управления транспортным средством может быть включено в схему 1 обработки. Схема 1 обработки может быть реализована автомобильной навигационной системой, такой как информационно-развлекательная система (IVI) в транспортном средстве, а устройство 7 управления транспортным средством может быть реализовано системой содействия движению, такой как усовершенствованная система содействия водителю (ADAS).
[0022]
Блок 11 формирования первого пути генерирует первый путь P1 движения, по меньшей мере, на основании окружения рассматриваемого транспортного средства, обнаруженного камерой 3 периферии. Первый путь P1 движения является возможностью в качестве пути движения при выполнении управления содействием движению на рассматриваемом транспортном средстве. Например, при выполнении управления следованием за предшествующим транспортным средством, блок 11 генерирования первого пути вычисляет траекторию движения предшествующего транспортного средства, обнаруженного датчиком 3 периферии, и генерирует первый путь движения, используя вычисленную траекторию движения предшествующего транспортного средства (путь следования за автомобилем: CFP). Например, траектория, следующая за центральным положением в направлении ширины транспортного средства предшестующего транспортного средства, рассчитывается как траектория движения предшествующего транспортного средства. Первый путь движения на основе траектории движения предшествующего транспортного средства установлена, например, на длину около 100 метров и последовательно обновляется по мере продвижения предшествующего транспортного средства. Блок 11 генерирования первого пути может напрямую использовать траекторию движения предшествующего транспортного средства для генерирования первого пути движения или может генерировать первый путь P1 движения на основе смещенной траектории, смещенной от траектории движения предшествующего транспортного средства в направлении ширины полосы движения.
[0023]
Когда не выполняется управление следованием за предшествующим транспортным средством на рассматриваемом транспортном средстве, блок 11 генерирования первого пути может ссылаться на информацию карты навигации, хранящуюся в блоке 41 хранения информации карты навигации, чтобы генерировать первый путь движения. Например, блок 11 генерирования первого пути устанавливает пункт назначения в информации карты навигации, хранящейся в блоке 41 хранения информации карты навигации, в соответствии с информацией направления, введенной пользователем. Блок 11 генерирования первого пути выполняет поиск предполагаемого пути движения от текущего положения (начальное положение) до пункта назначения рассматриваемого транспортного средства в информации карты навигации, хранящейся в блоке 41 хранения информации карты навигации, посредством алгоритма Дейкстры. Блок 11 генерирования первого пути генерирует первый путь движения вдоль середины в полосе движения, например, на основе окружения рассматриваемого транспортного средства, такого как положения границ полосы движения, обнаруженные датчиком 3 периферии, чтобы предписывать рассматриваемому транспортному средству следовать по искомому предполагаемому маршруту движения, чтобы ехать прямо или повернуть направо или налево.
[0024]
Блок 11 генерирования первого пути может вычислять целевую траекторию на основе окружения рассматриваемого транспортного средства, такого как положения границ полосы движения, обнаруженных датчиком 3 периферии, без обращения к информации карты навигации, хранящейся в блоке 41 хранения информации карты навигации, чтобы сгенерировать первый путь движения, используя рассчитанную целевую траекторию. Блок 11 генерирования первого пути может генерировать первый путь движения в пределах предварительно определенного участка из текущего положения рассматриваемого транспортного средства в положение, имеющее предварительно определенное расстояние от текущего положения. Предварительно определенный участок может быть установлен соответствующим образом в пределах диапазона, позволяющего датчику 3 периферии обнаруживать окружение, необходимое для управления содействием движению для рассматриваемого транспортного средства.
[0025]
Блок 12 генерирования второго пути генерирует второй путь движения (навигационный путь вождения; NDP) по меньшей мере на основе информации карты высокой четкости, хранящейся в блоке 42 хранения информации карты высокой четкости. Второй путь движения является возможностью в качестве пути движения при выполнении управления содействием движению на рассматриваемом транспортном средстве. Например, блок 12 генерирования второго пути задает положение рассматриваемого транспортного средства на карте высокой четкости на основе информации карты высокой четкости, хранящейся в блоке 42 хранения информации карты высокой четкости, и окружения рассматриваемого транспортного средства, такого как структура дороги, обнаруженная датчиком 3 периферии, для генерирования второго пути движения, проходящего в пределах полосы движения на основе положения рассматриваемого транспортного средства. Второй сгенерированный путь движения может проходить через середину в полосе движения.
[0026]
Блок 12 генерирования второго пути может генерировать второй путь движения, чтобы предписывать рассматриваемому транспортному средству следовать по предполагаемому пути движения, чтобы ехать по прямой или повернуть направо или налево в пределах участка на предполагаемом пути движения от начального положения до места назначения в информации карты навигации, хранящейся в блоке 41 хранения информации карты навигации. Блок 12 генерирования второго пути может генерировать второй путь движения в пределах предварительно определенного участка из текущего положения рассматриваемого транспортного средства в положение, имеющее заранее определенное расстояние от текущего положения. Предварительно определенный участок может быть установлен соответствующим образом в пределах диапазона, который охватывает информация карты высокой четкости.
[0027]
Пример управления содействием движению устройством содействия движению согласно варианту осуществления настоящего изобретения описан ниже со ссылкой на фиг. 2А-2C. Как показано на фиг. 2A, рассматриваемое транспортное средство C1 управляется так, чтобы следовать за предшествующим транспортным средством C2 на дороге с двумя полосами движения, включающей в себя полосы L1 и L2 движения, параллельные друг другу и проходящие в том же направлении, и изменяется от полосы L1 движения на левой стороне к полосе движения L2 движения на правой стороне. Предполагается, что путь движения для следования переключается с первого пути P1 движения на основе траектории движения предшествующего транспортного средства C2 на второй путь P2 движения на основе карты высокой четкости.
[0028]
Первый путь P1 движения генерируется в полосе L2 движения на правой стороне, а второй путь P2 движения генерируется в полосе L1 движения на левой стороне. Первый путь P1 движения отклоняется от второго пути P2 движения, чтобы не иметь сходства между собой (определение сходства между первым путем P1 движения и вторым путем P2 движения описано ниже). Поскольку переключение с первого пути P1 движения на второй путь P2 движения в этой точке вызовет неправильное поведение рассматриваемого транспортного средства C1, такое как блуждание, обработка переключения с первого пути P1 движения на второй путь P2 движения, таким образом, находится в режиме ожидания в моменты времени, показанные на фиг. 2А.
[0029]
Как показано на фиг. 2B, рассматриваемое транспортное средство C1 выполняет смену полосы движения с полосы L1 движения на левой стороне на полосу L2 движения на правой стороне. Первый путь P1 движения генерируется в полосе L2 движения на правой стороне, а второй путь P2 движения генерируется в полосе L1 движения на левой стороне. Поскольку первый путь P1 движения не имеет никакого сходства со вторым путем P2 движения, обработка переключения с первого пути P1 движения на второй путь P2 движения все еще находится в режиме ожидания в момент времени, показанный на фиг. 2B.
[0030]
Как показано на фиг. 2C, второй путь P2 движения затем генерируется в полосе L2 движения на правой стороне из-за смены полосы движения рассматриваемого транспортного средства C1 на полосу L2 движения на правой стороне. Таким образом, обработка переключения с первого пути P1 движения на второй путь P2 движения выполняется, когда отклонение между первым путем P1 движения и вторым путем P2 движения уменьшается, чтобы привести соответствующие пути, сгенерированные в той же полосе L2 движения, к подобию друг друга. Эта обработка может предотвратить неправильное поведение рассматриваемого транспортного средства C1, например, блуждание при переключении с первого пути P1 движения на второй путь P2 движения.
[0031]
Блок 13 сравнения путей, показанный на фиг. 1 сравнивает первый путь P1 движения, сгенерированный блоком 11 генерирования первого пути, со вторым путем P2 движения, сгенерированным блоком 12 генерирования второго пути, и определяет, имеют ли первый путь P1 движения и второй путь P2 движения сходство друг с другом. Как используется в варианте осуществления настоящего изобретения, термин «сходство» охватывает значение «тождество». Таким образом, определение того, что первый путь P1 движения и второй путь P2 движения имеют сходство, охватывает случай, в котором первый путь P1 движения и второй путь P2 движения соответствуют друг другу и полностью совпадают.
[0032]
Например, блок 13 сравнения путей может определить, меньше ли расхождение между первым путем P1 движения и вторым путем P2 движения, чем предварительно определенное пороговое значение, чтобы определить, имеют ли первый путь P1 движения и второй путь P2 движения сходство по форме. В частности, блок 13 сравнения путей может определить, что первый путь P1 движения и второй путь P2 движения не имеют сходства, когда расхождение между первым путем P1 движения и вторым путем P2 движения, является предварительно определенным пороговым значением или больше, и определить, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда расхождение между первым путем P1 движения и вторым путем P2 движения меньше предварительно определенного порогового значения. Предварительно определенное пороговое значение может быть установлено соответствующим образом и может быть предварительно сохранено, например, в запоминающем устройстве 4.
[0033]
Например, как показано на фиг. 3, блок 13 сравнения путей вычисляет кратчайшее расстояние Di (i=0 до n: n - положительное число) между первым путем P1 движения и вторым путем P2 движения в каждой точке на всем участке либо первого пути P1 движения, либо второго пути P2 движения, имеющего более короткое расстояние впереди рассматриваемого транспортного средства C1, который в этом случае является первым путем P1 движения (весь участок, в котором первый путь P1 движения и второй путь P2 движения перекрываются друг с другом) и определяет, все ли вычисленные кратчайшие расстояния Di меньше, чем предварительно определенное пороговое значение Dt. Блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда все самые короткие расстояния Di меньше предварительно определенного порогового значения Dt, и определяет, что первый путь P1 движения и второй путь P2 движения не имеют сходства, когда по меньшей мере одно из самых коротких расстояний Di равно предварительно определенному пороговому значению Dt или больше. Число точек, в которых вычисляются кратчайшие расстояния Di, может быть бесконечным, поскольку большее число увеличивает точность определения, или может быть рассчитано с помощью конечного числа с заданными интервалами с учетом расчетной нагрузки. Первый путь P1 движения и второй путь P2 движения определяются как имеющие сходство, когда все самые короткие расстояния меньше, чем предварительно определенное пороговое значение Dt, независимо от того, является ли, например, первый путь P1 движения извилистым.
[0034]
Предварительно определенное пороговое значение Dt, которое нужно сравнить с кратчайшим расстоянием Di, может быть рассчитано в соответствии со следующим уравнением (1), чтобы быть значением, необходимым для определения того, что оба пути находятся в пределах одной полосы L2:
Dt=WL/2 - WC/2 (1)
где WL - ширина полосы L2 движения, а WC - ширина предшествующего транспортного средства C2, как показано на фиг. 4.
[0035]
По сравнению со случаем, показанным на фиг. 3, когда второй путь P2 движения имеет меньшую длину, чем первый путь P1 движения, кратчайшее расстояние D1 между первым путем P1 движения и вторым путем P2 движения в каждой точке может быть рассчитано во всем участке второго пути P2 движения. Вместо вычисления кратчайших расстояний Di во всем участке, в котором первый путь P1 движения и второй путь P2 движения перекрываются друг с другом, кратчайшие расстояния Di могут быть вычислены в пределах предварительно определенного участка от переднего конца до предварительно определенной точки перед самым дальним концом перекрывающегося участка.
[0036]
Блок 13 сравнения путей может вычислять кратчайшие расстояния Di между первым путем P1 движения и вторым путем P2 движения в пределах предварительно определенного участка впереди рассматриваемого транспортного средства C1, исключая текущее положение. Например, как показано на фиг. 5, блок 13 сравнения путей может вычислять кратчайшие расстояния Di между первым путем P1 движения и вторым путем P2 движения на участке перед точкой наблюдения передней стороны, имеющей расстояние L0 от рассматриваемого транспортного средства C1, исключая область от текущего положения рассматриваемого транспортного средства C1 до точки, имеющей расстояние, меньшее чем расстояние L0 точки наблюдения передней стороны. Расстояние L0 точки наблюдения передней стороны может быть рассчитано так, что скорость рассматриваемого транспортного средства C1 умножается на предварительно определенную постоянную времени, предварительно установленную, например, для скорости рассматриваемого транспортного средства C1. Наименьшее расстояние Di может быть рассчитано в предварительно определенном положении или в пределах заранее определенного участка в области от положения, удаленного от рассматриваемого транспортного средства C1 на расстояние L0 точки наблюдения передней стороны, до задней позиции предшествующего транспортного средства C2. Фиг. 5 иллюстрирует случай вычисления кратчайшего расстояния Di в положении, удаленном от рассматриваемого транспортного средства C1 на расстояние L0 точки наблюдения передней стороны.
[0037]
Блок 13 сравнения путей может вычислять заранее предварительно определенное пороговое значение Dt, которое должно сравниваться с кратчайшим расстоянием Di, в соответствии со следующим уравнением (2):
Dt=L0 × Vs/V (2)
где L0 - расстояние точки наблюдения передней стороны в качестве контрольной целевой точки при следовании по пути движения, V - текущая скорость рассматриваемого транспортного средства C1, а Vs - скорость поперечного перемещения, как поведение рассматриваемого транспортного средства C1, допустимое при переключении пути движения (например, Vs=0,2 м/с).
[0038]
Когда, по меньшей мере, один из первого пути P1 движения и второго пути P2 движения имеет длину, меньшую чем предварительно определенное пороговое значение (например, 10 метров), блок 13 сравнения путей может определить, что первый путь P1 движения и второй путь Р2 движения не имеют сходства, поскольку определение сходства между первым путем Р1 движения и вторым путем Р2 движения не может быть выполнено точно. Например, длина первого пути P1 движения обычно уменьшается, когда рассматриваемое транспортное средство C1 приближается к предшествующему транспортному средству C2. Длина второго пути P2 движения может уменьшаться вблизи границы диапазона, который охватывает информация карты высокой четкости.
[0039]
Другой пример управления содействием движению с помощью устройства содействия движению согласно варианту осуществления настоящего изобретения описан ниже со ссылкой на фиг. 6А-6C. Фиг. 6А иллюстрирует случай, в котором рассматриваемое транспортное средство С1 следует за предшествующим транспортным средством С2 и поворачивает налево на перекрестке (Т-образный перекресток), чтобы войти в полосу L1 движения. Предполагается, что путь движения для следования переключается с первого пути P1 движения на основе траетории движения предшествующего транспортного средства C2 на второй путь P2 движения на основе карты высокой четкости. Как показано на фиг. 6B, переключение с первого пути P1 движения на второй путь P2 движения при повороте вызывает неправильное поведение рассматриваемого транспортного средства C1, поскольку направление (ориентация) первого пути P1 движения в текущем положении рассматриваемого транспортного средства C1 отклоняется от направления (ориентации) второго пути P2 движения. Таким образом, устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения выполняет обработку переключения с первого пути P1 движения на второй путь P2 движения после того, как первый путь P1 движения и второй путь P2 движения определены как имеющие сходство, как показано на фиг. 6C.
[0040]
Блок 13 сравнения путей может определять, имеют ли соответствующие направления (ориентации) первого пути P1 движения и второго пути P2 движения сходство друг с другом, чтобы определять, имеют ли первый путь P1 движения и второй путь P2 движения сходство по форме. Например, как показано на фиг. 7, блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда угол θ между касательной LA к первому пути P1 движения в точке p1 и касательной LB ко второму пути P2 движения в точке p2, причем две точки имеют самое короткое расстояние друг от друга в предварительно определенной позиции перекрытия между первым путем P1 движения и вторым путем P2 движения, меньше предварительно определенного порогового значения θt и определяет, что первый путь P1 движения и второй путь P2 движения не имеет сходства, когда угол θ равен предварительно определенному пороговому значению θt или больше. Предварительно определенное пороговое значение θt может быть установлено соответствующим образом и может быть предварительно сохранено, например, в запоминающем устройстве 4. Когда угол θ вычисляется во множестве положений, в которых первый путь P1 движения и второй путь P2 движения приближаются друг к другу, блок 13 сравнения путей может определить, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда все углы θ меньше предварительно определенного порогового значения θt и определяют, что первый путь P1 движения и второй путь P2 движения не имеют сходства, когда любой из углов θ равен предварительно определенному пороговому значению θt или больше.
[0041]
Предварительно определенный участок впереди рассматриваемого транспортного средства C1 устанавливается на весь участок либо первого пути P1 движения, либо второго пути P2 движения, имеющего более короткую длину. Блок 13 сравнения путей может определять, имеют ли соответственные направления первого пути P1 движения и второго пути P2 движения сходство в текущем положении рассматриваемого транспортного средства C1. Альтернативно, блок 13 сравнения путей может определять, имеют ли соответствующие направления первого пути P1 движения и второго пути P2 движения сходство в точке, удаленной от рассматриваемого транспортного средства C1 на расстояние точки наблюдения передней стороны.
[0042]
Фиг. 8 иллюстрирует случай генерирования первого пути P1 движения на основе траектории движения предшествующего транспортного средства C2 и второго пути P2 движения на основе карты высокой четкости, в котором второй путь P2 движения должен повернуть направо. Предполагается, что путь движения для следования переключается с первого пути P1 движения на второй путь P2 движения. Когда скорость (расчетная скорость) при движении по второму пути P2 движения низкая, и текущая скорость рассматриваемого транспортного средства C1, следующего по первому пути P1 движения на основании траектории движения предшествующего транспортного средства C2, отличается от скорости при движении по второму пути P2 движения, переключение с первого пути P1 движения на второй путь P2 движения приводит к внезапному замедлению, вызывая неправильное поведение рассматриваемого транспортного средства C1. Таким образом, устройство содействия движению в соответствии с вариантом осуществления настоящего изобретения выполняет обработку переключения с первого пути P1 движения на второй путь P2 движения, принимая во внимание сходство между текущей скоростью рассматриваемого транспортного средства C1 и скоростью при движении по второму пути P2 движения.
[0043]
Блок 14 получения скорости транспортного средства получает текущую скорость рассматриваемого транспортного средства C1, обнаруженную датчиком 22 скорости транспортного средства. Блок 14 получения скорости транспортного средства дополнительно получает скорость (расчетную скорость), предназначенную для движения по второму пути P2 движения, сгенерированному блоком 12 генерирования второго пути. Расчетная скорость при движении по второму пути P2 движения может быть рассчитана в соответствии с информацией об ограничении скорости, включенной в информацию карты навигации, сохраненную в блоке 41 хранения информации карты навигации, или информацию карты высокой четкости, сохраненную в блоке 42 хранения информации карты высокой четкости. Альтернативно, расчетная скорость при движении по второму пути P2 движения может быть рассчитана в соответствии с информацией о скоростях других транспортных средств вблизи рассматриваемого транспортного средства C1, обнаруженных датчиком 3 периферии. Расчетная скорость при движении по второму пути P2 движения также может быть рассчитана в соответствии со структурой дороги (изображением дороги), полученной из информации карты высокой четкости, хранящейся в блоке 42 хранения информации карты высокой четкости, или из структуры дороги (изображения дороги), включенной в окружение, обнаруженное датчиком 3 периферии. Расчетная скорость при движении по второму пути P2 движения может быть рассчитана либо постоянно, либо по-разному во всем участке второго пути P2 движения.
[0044]
Блок 15 сравнения скорости сравнивает текущую скорость рассматриваемого транспортного средства C1, полученную блоком 14 получения скорости транспортного средства, с расчетной скоростью при движении по второму пути P2 движения, полученной блоком 14 получения скорости транспортного средства, чтобы определить, имеют ли соответствующие скорости сходство, чтобы определить, может ли рассматриваемое транспортное средство C1 изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения при переключении с первого пути P1 движения на второй путь P2 движения. В частности, блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может изменять текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, когда текущая скорость рассматриваемого транспортного средства C1 и расчетная скорость при движении по второму пути P2 движения имеют сходство и определяет, что рассматриваемое транспортное средство C1 не может изменять текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, когда текущая скорость рассматриваемого транспортного средства C1 и расчетная скорость при движении на второму пути P2 движения не имеют сходства.
[0045]
Например, блок 15 сравнения скорости вычисляет разницу между текущей скоростью рассматриваемого транспортного средства C1 и расчетной скоростью при движении по второму пути P2 движения, полученной блоком 14 получения скорости транспортного средства. Когда абсолютное значение вычисленной разности меньше предварительно определенного порогового значения, блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, поскольку текущая скорость рассматриваемого транспортного средства C1 и расчетная скорость при движении по второму пути P2 движения имеют сходство. Когда абсолютное значение разности вычисления равно предварительно определенному пороговому значению или больше, блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 не может изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, поскольку текущая скорость рассматриваемого транспортного средства C1 и расчетная скорость при движении по второму пути P2 движения не имеют сходства. Предварительно определенное пороговое значение может быть установлено соответствующим образом и может быть предварительно сохранено, например, в запоминающем устройстве 4.
[0046]
В качестве альтернативы, как показано на фиг. 9А и фиг. 9B, блок 15 сравнения скорости вычисляет замедление α, необходимое для замедления от текущей скорости V1 рассматриваемого транспортного средства C1 до расчетной скорости V2, прежде чем достичь самой дальней точки из текущего положения рассматриваемого транспортного средства C1, в соответствии с текущей скоростью V1 рассматриваемого транспортного средства C1, полученной блоком 14 получения скорости транспортного средства, расстоянием Lc от текущего положения рассматриваемого транспортного средства C1 до самой дальней точки на участке, в котором первый путь P1 движения и второй путь P2 движения перекрываются друг с другом и расчетной скоростью V2 при движении по второму пути P2 движения в самой дальней точке. Блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может следовать расчетной скорости, когда вычисленное замедление α меньше предварительно определенного порогового значения αt, и определяет, что рассматриваемое транспортное средство C1 не может следовать расчетной скорости, когда вычисленное замедление α равно предварительно определенному пороговому значению αt или больше. Предварительно определенное пороговое значение αt может быть установлено соответствующим образом и может быть предварительно сохранено, например, в запоминающем устройстве 4.
[0047]
Хотя на фиг. 9А и фиг. 9B иллюстрируют случай выполнения управления замедлением на рассматриваемом транспортном средстве C1, управление ускорением может выполняться на рассматриваемом транспортном средстве C1 аналогичным образом. В частности, когда текущая скорость рассматриваемого транспортного средства C1, полученная блоком 14 получения скорости транспортного средства, ниже, чем расчетная скорость при движении по второму пути P2 движения, и когда разница между текущей скоростью рассматриваемого транспортного средства C1 и расчетной скоростью при движении по второму пути P2 движения составляет предварительно определенное пороговое значение или больше, блок 15 сравнения скорости вычисляет ускорение, необходимое для ускорения от текущей скорости рассматриваемого транспортного средства C1 до расчетной скорости. Блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может следовать расчетной скорости, когда вычисленное ускорение меньше предварительно определенного порогового значения (максимального ускорения). Блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может следовать расчетной скорости, когда вычисленное ускорение меньше предварительно определенного порогового значения, и определяет, что рассматриваемое транспортное средство C1 не может следовать расчетной скорости, когда вычисленное ускорение равно предварительно определенному пороговому значению или больше. Предварительно определенное пороговое значение может быть установлено соответствующим образом и может быть предварительно сохранено, например, в запоминающем устройстве 4.
[0048]
Блок 16 переключения пути определяет, нужно ли рассматриваемому транспортному средству C1 переключать путь движения для следования посредством управления содействием движению с первого пути P1 движения, по которому рассматриваемое транспортное средство C1 в настоящее время движется, на второй путь P2 движения, который является возможностью в качестве пути движения для следования. Например, когда второй путь P2 движения не генерируется блоком 12 генерирования второго пути, поскольку информация карты высокой четкости отсутствует в участке дороги впереди рассматриваемого транспортного средства C1, блок 16 переключения пути определяет, что нет необходимости переключать путь движения для следования. Когда первый путь P1 движения основан на траектории движения предшествующего транспортного средства C2, и когда генерируется второй путь P2 движения, блок 16 переключения пути определяет, что путь движения для следования необходимо переключить, поскольку предшествующее транспортное средство C2 могло бы двигаться в направлении, отличном от направления к месту назначения рассматриваемого транспортного средства C1. Блок 16 переключения пути может определять, что переключение пути движения для следования необходимо в каждом случае, когда генерируется второй путь P2 движения.
[0049]
Блок 16 переключения пути переключает путь движения для следования с помощью управления содействием движению в заданный момент времени с первого пути P1 движения, по которому рассматриваемое транспортное средство C1 в настоящее время движется, на второй путь P2 движения, который является возможностью в качестве пути движения для следования, в соответствии с результатом определения сходства между первым путем P движения и вторым путем P2 движения посредством блока 13 сравнения путей и результатом определения сходства между соответствующими скоростями блоком 15 сравнения скорости.
[0050]
Например, когда блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, и когда блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, блок 16 переключения пути может переключать путь движения для следования с первого пути P1 движения на второй путь P2 движения. Блок 16 переключения пути может переключать путь движения для следования от первого пути P1 движения на второй путь P2 движения, либо когда блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, либо когда блок 15 сравнения скорости определяет, что рассматриваемое транспортное средство C1 может изменять текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения. Блок 16 переключения пути может запросить подтверждение у пользователя перед переключением пути движения с первого пути P1 движения на второй путь P2 движения и выполнить переключение при приеме разрешения.
[0051]
Когда блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения не имеют сходства, блок 16 переключения пути находится в режиме ожидания, не переключая путь движения для следования с первого пути P1 движения на второй путь P2 движения. В частности, предполагается, что предшествующее транспортное средство движется по существу в середине полосы движения, когда первый путь P1 движения генерируется на основе траектории движения предшествующего транспортного средства. Второй сгенерированный путь P2 движения обычно проходит через середину полосы движения. Блок 16 переключения пути предполагает, что отклонение между первым путем P1 движения и вторым путем P2 движения может уменьшаться, чтобы иметь сходство позже, даже если первый путь P1 движения и второй путь P2 движения в настоящее время не имеют сходства, и, таким образом, находится в режиме ожидания, пока блок 13 сравнения пути не определит, что первый путь P1 движения и второй путь P2 движения имеют сходство.
[0052]
Когда определено, что первый путь P1 движения и второй путь P2 движения имеют сходство, блок 16 переключения пути переключается с первого пути P1 движения на второй путь P2 движения в заранее определенный момент времени во время движения по первому пути P1 движения и второму пути P2 движения, намеченному при определении сходства. Например, при определении сходства в предварительно определенном участке из текущего положения рассматриваемого транспортного средства C1 в положение, имеющее заранее определенное расстояние, блок 16 переключения пути может переключаться с первого пути P1 движения на второй путь P2 движения во время движения в предварительно определенном участке. В качестве альтернативы, при определении сходства в предварительно определенном положении в пределах участка, в котором первый путь P1 движения и второй путь P2 движения перекрываются друг с другом, блок 16 переключения пути может переключать путь движения в момент времени при достижении предварительно определенного положения. Например, как показано на фиг. 5, при определении сходства в положении впереди точки наблюдения передней стороны, имеющей расстояние L0 от рассматриваемого транспортного средства C1, за исключением области, имеющей расстояние от текущего положения рассматриваемого транспортного средства C1, которое меньше расстояния L0 точки наблюдения передней стороны, блок 16 переключения пути может переключать путь движения в точке, достигающей положения впереди точки наблюдения передней стороны, имеющей расстояние L0 от рассматриваемого транспортного средства C1.
[0053]
Блок 16 переключения пути может переключать путь движения для следования со второго пути P2 движения на первый путь P1 движения после переключения с первого пути P1 движения на второй путь P2 движения. Например, блок 16 переключения пути может переключать путь движения для следования со второго пути P2 движения на первый путь P1 движения, когда рассматриваемое транспортное средство C1 въезжает на участок дороги, не покрытый информацией карты высокой четкости, или когда точность информация карты высокой четкости ниже предварительно определенного порога.
[0054]
Блок 17 управления представлением выводит управляющий сигнал для управления дисплеем 52 и громкоговорителем 53 пользовательского I/F 5, чтобы представить информацию руководства пользователю в соответствии с результатом переключения пути движения блоком 16 переключения пути. Блок 17 управления представлением может побуждать пользователя двигаться по первому пути P1 движения до того, как блок 16 переключения пути переключается с первого пути P1 движения на второй путь P2 движения. Блок 17 управления представлением может предоставлять уведомление пользователю, когда блок 16 переключения пути переключается с первого пути P1 движения на второй путь P2 движения.
[0055]
Пользовательский I/F 5 включает в себя устройство 51 ввода, дисплей 52 и громкоговоритель 53. Примеры устройства 51 ввода включают в себя переключатель, кнопку, клавиатуру, микрофон и сенсорную панель. Устройство 51 ввода принимает от пользователя различную информацию, такую как установка пункта назначения рассматриваемого транспортного средства C1, инструкции для переключения между автономным вождением и ручным вождением и разрешение на переключение с первого пути P1 движения на второй путь P2 движения. Дисплей 52 может быть жидкокристаллическим дисплеем (LCD), например, и отображает изображение, указывающее текстовые данные или значки, в соответствии с управляющим сигналом от блока 17 управления представлением. Громкоговоритель 53 выводит голос или звук уведомления в соответствии с управляющим сигналом от блока 17 управления представлением.
[0056]
Устройство 7 управления транспортным средством вычисляет величину управления для управления исполнительным механизмом 6 на основе траектории движения, генерируемой блоком генерирования первого пути или блоком генерирования второго пути. Рассчитанная величина управления отправляется на исполнительный механизм 6.
[0057]
Устройство 7 управления транспортным средством выдает управляющий сигнал для управления исполнительным механизмом 6 для движения по первому пути P1 движения, прежде чем блок 16 переключения пути переключает путь движения для следования с первого пути P1 движения на второй путь P2 движения. Устройство 7 управления транспортным средством может выполнять автономное вождение для автономного вождения без участия пользователя, участвующего в какой–либо операции, или выполнять автономное вождение для управления по меньшей мере одной из операций вождения, торможения и рулевого управления.
[0058]
Устройство 7 управления транспортным средством выдает управляющий сигнал для управления исполнительным механизмом 6 для движения по второму пути P2 движения, когда блок 16 переключения пути переключает путь движения для следования с первого пути P1 движения на второй путь P2 движения. Устройство 7 управления транспортным средством может выполнять автономное вождение для автономного вождения без участия пользователя, участвующего в какой-либо операции, или выполнять автономное вождение для управления по меньшей мере одной из операций вождения, торможения и рулевого управления. Устройство 7 управления транспортным средством может выполнять управление ускорением/замедлением на рассматриваемом транспортном средстве C1, чтобы приблизить текущую скорость рассматриваемого транспортного средства C1 к расчетной скорости при движении по второму пути P2 движения перед тем, как блок 16 переключения пути переключит путь движения для следования с первого пути P1 движения на второй путь P2 движения.
[0059]
Исполнительный механизм 6 управляет состоянием движения рассматриваемого транспортного средства C1 в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Исполнительный механизм 6 содержит исполнительный механизм 61 приведения в движение, исполнительный механизм 62 тормоза и исполнительный механизм 63 рулевого управления. Исполнительный механизм 61 приведения в движение представляет собой, например, дроссельный клапан с электронным управлением и управляет акселератором рассматриваемого транспортного средства C1, чтобы регулировать степень открытия в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Исполнительный механизм 62 тормоза является, например, гидравлическим контуром и управляет операцией торможения тормоза рассматриваемого транспортного средства C1 в соответствии с управляющим сигналом от устройства 7 управления транспортным средством. Исполнительный механизм 63 рулевого управления управляет рулевым управлением рассматриваемого транспортного средства C1 в соответствии с управляющим сигналом от устройства 7 управления транспортным средством.
[0060]
(Способ содействия движению)
Способ содействия движению в соответствии с вариантом осуществления настоящего изобретения иллюстрируется ниже со ссылкой на блок–схему последовательности операций на фиг. 10. Предполагается, что рассматриваемое транспортное средство C1, проиллюстрированное ниже, движется при этом следуя по первому пути P1 движения, сгенерированному блоком 11 генерирования первого пути.
[0061]
На этапе S1 датчик 3 периферии обнаруживает окружение рассматриваемого транспортного средства C1. Блок 11 генерирования первого пути генерирует первый путь P1 движения, по которому движется рассматриваемое транспортное средство C1, в соответствии с окружением рассматриваемого транспортного средства C1, обнаруженным датчиком 3 периферии. Например, блок 11 генерирования первого пути вычисляет траекторию движения предшествующего транспортного средства C2, обнаруженного датчиком 3 периферии, и генерирует первый путь P1 движения на основе вычисленной траетории движения предшествующего транспортного средства C2. Траектория движения предшествующего транспортного средства C2 обновляется последовательно в связи с движением предшествующего транспортного средства C2, так что первый путь P1 движения генерируется последовательно.
[0062]
На этапе S2 блок 12 генерирования второго пути генерирует второй путь P2 движения, который является возможностью в качестве пути движения, которому должно следовать рассматриваемое транспортное средство C1, в соответствии с информацией карты высокой четкости, хранящейся в блоке 42 хранения информации карты высокой четкости. Например, блок 12 генерирования второго пути извлекает структуру дороги впереди рассматриваемого транспортного средства C1 из информации карты высокой четкости, хранящейся в блоке 42 хранения информации карты высокой четкости, чтобы сгенерировать второй путь P2 движения на основе извлеченной структуры дороги.
[0063]
На этапе S3 датчик 22 скорости транспортного средства последовательно обнаруживает скорость рассматриваемого транспортного средства C1. Блок 14 получения скорости транспортного средства получает скорость рассматриваемого транспортного средства C1, обнаруженную датчиком 22 скорости транспортного средства. Датчик 3 периферии обнаруживает расчетную скорость при движении по второму пути P2 движения, сгенерированному блоком 12 генерирования второго пути. Блок 14 получения скорости транспортного средства получает расчетную скорость при движении по второму пути P2 движения, обнаруженную датчиком 3 периферии.
[0064]
На этапе S4 блок 16 переключения пути определяет, нужно ли рассматриваемому транспортному средству C1 переключать путь движения для следования с первого пути P1 движения, сгенерированного блоком 11 генерирования первого пути, на второй путь P2 движения, сгенерированный блоком генерирования второго пути. 12. Например, блок 16 переключения пути определяет, что нет необходимости переключать путь движения для следования, когда отсутствует второй путь P2 движения, и определяет, что путь движения необходимо переключать, когда присутствует второй путь P2 движения. Когда определено, что переключение пути для следования необходимо, процесс переходит к этапу S5.
[0065]
На этапе S5 и этапе S6 блок 13 сравнения пути выполняет обработку определения сходства, чтобы определить, имеют ли сходство первый путь P1 движения, сгенерированный блоком 11 генерирования первого пути, и второй путь P2 движения, сгенерированный блоком 12 генерирования второго пути. На этапе S5 блок 13 сравнения пути определяет, меньше ли расхождение между первым путем P1 движения и вторым путем P2 движения, чем предварительно определенное пороговое значение, чтобы определить, имеют ли первый путь P1 движения и второй путь Р2 движения сходство по форме. Блок 13 сравнения путей может определять, что первый путь P1 движения и второй путь P2 движения не имеют сходства, когда по меньшей мере один из первого пути P1 движения и второго пути P2 движения имеет длину, которая меньше предварительно определенного порогового значения. Когда расхождение между первым путем P1 движения и вторым путем P2 движения равно предварительно определенному пороговому значению или больше, и, таким образом, определяется, что первый путь P1 движения и второй путь P2 движения не имеют сходства по форме, обработка находится в режиме ожидания без переключения с первого пути P1 движения на второй путь P2 движения, и процесс переходит к этапу S10. Когда расхождение между первым путем P1 движения и вторым путем P2 движения меньше предварительно определенного порогового значения на этапе S5, первый путь P1 движения и второй путь P2 движения определяются как имеющие сходство по форме, и процесс переходит к этапу S6.
[0066]
На этапе S6 блок 13 сравнения путей определяет, меньше ли угол между соответствующими касательными к первому пути P1 движения и второму пути P2 движения в предварительно определенных точках, имеющих наименьшее расстояние друг от друга, чем предварительно определенное пороговое значение, чтобы определять, имеют ли сходство направления (ориентации) первого пути P1 движения и второго пути P2 движения. Когда угол между соответствующими касательными равен предварительно определенному пороговому значению или больше, определяют, что направления (ориентации) первого пути P1 движения и второго пути P2 движения не имеют сходства, чтобы привести обработку в режим ожидания без переключения с первого пути P1 движения на второй путь P2 движения, и процесс переходит к этапу S10. Когда угол между соответствующими касательными меньше предварительно определенного порогового значения на этапе S6, направления (ориентации) первого пути P1 движения и второго пути P2 движения определяются как имеющие сходсвто, и процесс переходит к этапу S7.
[0067]
На этапе S7 блок 15 сравнения скорости сравнивает текущую скорость рассматриваемого транспортного средства C1 с расчетной скоростью при движении по второму пути P2 движения, полученной блоком 14 получения скорости транспортного средства, чтобы определить, имеют ли соответствующие скорости сходство, так чтобы определить, может ли рассматриваемое транспортное средство C1 изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения при переключении с первого пути P1 движения на второй путь P2 движения. Например, блок 15 сравнения скорости определяет, что соответствующие скорости имеют сходство и что рассматриваемое транспортное средство C1 может следовать расчетной скорости, когда разница между текущей скоростью рассматриваемого транспортного средства C1 и расчетной скоростью при движении по второму пути P2 движения меньше предварительно определенного порогового значения и определяет, что соответствующие скорости не имеют сходства и что рассматриваемое транспортное средство C1 не может следовать расчетной скорости, когда разница между текущей скоростью рассматриваемого транспортного средства C1 и расчетной скоростью при движении по второму пути P2 движения равна предварительно определенному пороговому значению или больше. Процесс переходит к этапу S8, когда определяется, что рассматриваемое транспортное средство C1 способно следовать расчетной скорости.
[0068]
На этапе S8 блок 16 переключения пути переключает путь движения в качестве цели, которой рассматриваемое транспортное средство C1 следует, с первого пути P1 движения на второй путь P2 движения в предварительно определенный момент времени. Устройство 7 управления транспортным средством выполняет управление содействием движению на рассматриваемом транспортном средстве C1, чтобы следовать второму пути P2 движения. Устройство 7 управления транспортным средством выполняет управление ускорением/замедлением на рассматриваемом транспортном средстве C1, чтобы приблизить текущую скорость рассматриваемого транспортного средства C1 к расчетной скорости, чтобы изменить текущую скорость рассматриваемого транспортного средства C1 на расчетную скорость при движении по второму пути P2 движения.
[0069]
Когда на этапе S7 определено, что рассматриваемое транспортное средство C1 неспособно следовать расчетной скорости, процесс переходит к этапу S9. На этапе S9 управление ускорением/замедлением выполняется на рассматриваемом транспортном средстве C1 для приближения текущей скорости рассматриваемого транспортного средства C1 к расчетной скорости, чтобы рассматриваемое транспортное средство C1 могло изменять текущую скорость для следования заданной скорости при движении по второму пути P2 движения. Управление ускорением/замедлением выполняется на рассматриваемом транспортном средстве C1 для приближения скорости рассматриваемого транспортного средства C1 к расчетной скорости, так что путь движения для следования переключается на второй путь P2 движения в точке, когда скорость рассматриваемого транспортного средства C1 достигает допустимой скорости для следования расчетной скорости. Когда ускорение или замедление, необходимое для того, чтобы позволить рассматриваемому транспортному средству C1 изменять текущую скорость для следования заданной скорости при движении по второму пути P2 движения, является предварительно определенным пороговым значением или больше, обработка может быть в режиме ожидания без переключения с первого пути P1 движения на второй путь P2 движения.
[0070]
На этапе S10 определяется, должно ли быть выключено зажигание. Процесс заканчивается, когда определяется, что зажигание должно быть выключено. Процесс возвращается к этапу S1, когда определяется, что зажигание еще не должно быть выключено. Когда блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения не имеют сходства ни на этапе S5, ни на этапе S6, блок 11 генерирования первого пути может снова генерировать первый путь P1 движения на этапе S1 после этапа S10 так что первый путь P1 движения имеет сходство со вторым путем P2 движения. Например, повторное генерирование первого пути P1 движения с помощью блока 11 генерирования первого пути таким же образом, как и предыдущий этап S1, увеличивает вероятность того, что первый путь P1 движения будет иметь сходство со вторым путем P2 движения в связи с движением рассматриваемого транспортного средства C1 и предшествующего транспортного средства. В качестве альтернативы, блок 11 генерирования первого пути может привести к смещению первого пути P1 движения, чтобы уменьшить величину отклонения от второго пути P2 движения, когда расстояние от рассматриваемого транспортного средства C1 увеличивается.
[0071]
(Преимущественные эффекты)
Согласно варианту осуществления настоящего изобретения блок 11 генерирования первого пути генерирует первый путь P1 движения, по которому следует рассматриваемое транспортное средство, и устройство 7 управления транспортным средством выполняет управление содействием движению на рассматриваемом транспортном средстве на основе первого пути P1 движения. Блок 12 генерирования второго пути также генерирует второй путь P2 движения на основе информации карты высокой четкости вблизи окрестности рассматриваемого транспортного средства, и блок 13 сравнения путей определяет, имеют ли сходство первый путь P1 движения и второй путь P2 движения. Когда определено, что первый путь P1 движения и второй путь P2 движения имеют сходство, блок 16 переключения пути переключает путь движения в качестве цели, которой рассматриваемое транспортное средство следует, с первого пути P1 движения на второй путь P2 движения. Переключение пути движения, когда первый путь P1 движения и второй путь P2 движения имеют сходство и величина взаимного отклонения мала, может предотвратить неправильное поведение, такое как блуждание при переключении.
[0072]
Если блок 16 переключения пути переключает путь движения в качестве цели, которой рассматриваемое транспортное средство следует, с первого пути P1 движения на второй путь P2 движения, в то время как первый путь P1 движения и второй путь P2 движения не имеют сходства, путь движения будет переключаться, когда величина взаимного отклонения велика, что может вызвать неправильное поведение, например блуждание при переключении. Кроме того, для переключения пути движения в качестве цели, которой рассматриваемое транспортное средство следует, с первого пути P1 движения на второй путь P2 движения, в то время как первый путь P1 движения и второй путь P2 движения не имеют сходства, требуется большее расстояние для перехода с первого пути P1 движения на второй путь P2 движения. Увеличение расстояния движения, необходимого для переключения с первого пути P1 движения на второй путь P2 движения, дополнительно требует точной цели управления и пути переключения, которые должны генерироваться непрерывно в положение, удаленное от рассматриваемого транспортного средства, чтобы предотвратить неправильное поведение, такое как как блуждание при переключении. Увеличение расстояния движения также требует непрерывного точного получения окружающих условий до положения, удаленного от рассматриваемого транспортного средства. Было бы трудно добиться непрерывного генерирования точной цели управления и пути переключения и непрерывного точного получения условий окружающей среды в положении, удаленном от рассматриваемого транспортного средства, в зависимости от условий окружающей среды рассматриваемого транспортного средства или мощности датчиков. Такая ситуация увеличивает вероятность возникновения неправильного поведения, например, блуждания при переключении. Согласно настоящему варианту осуществления путь движения может переключаться, когда первый путь P1 движения и второй путь P2 движения имеют сходство, и величина взаимного отклонения мала, чтобы предотвратить неправильное поведение, такое как блуждание при переключении.
[0073]
Схема 1 обработки определяет наличие или отсутствие информации карты высокой четкости, чтобы покрыть дорогу, по которой движется рассматриваемое транспортное средство, и генерирует второй путь движения на основе информации карты высокой четкости, определенной как присутствующей вблизи окрестности рассматриваемого транспортного средства, когда присутствует информация карты высокой четкости. Таким образом, путь движения может переключаться с первого пути P1 движения на второй путь P2 движения, когда присутствует информация карты высокой четкости. Определение наличия или отсутствия информации карты высокой четкости позволяет надежно переключаться с первого пути P1 движения на второй путь P2 движения после въезда на дорогу, покрытую информацией карты высокой четкости. Определение наличия или отсутствия информации карты высокой четкости может выполняться с заранее определенными интервалами (например, 100 мс).
[0074]
Блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда расхождение между первым путем P1 движения и вторым путем P2 движения меньше предварительно определенного порогового значения. Определение, основанное на расхождении между первым путем P1 движения и вторым путем P2 движения, может позволить переключать путь движения, когда величина отклонения между первым путем P1 движения и вторым путем P2 движения мала, чтобы предотвратить неправильное поведение, такое как блуждание при переключении.
[0075]
Блок 13 сравнения путей определяет, меньше ли расхождение между первым путем P1 движения и вторым путем P2 движения, чем предварительно определенное пороговое значение на участке перед точкой наблюдения передней стороны, имеющей расстояние L0 от рассматриваемого транспортного средства C1, как показано на фиг. 5. Установка участка впереди точки наблюдения передней стороны в качестве контрольной цели позволяет постоянно учитывать стабильность, чтобы достичь стабильного движения после переключения по сравнению со случаем фокусировки на мгновенной величине управления. Вычислительная нагрузка также может быть уменьшена по сравнению со случаем определения расхождения между первым путем P1 движения и вторым путем P2 движения на всем участке, включая область от положения за точкой наблюдения передней стороны, имеющей расстояние L0, до рассматриваемого транспортного средства С1.
[0076]
Блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения имеют сходство, когда угол θ меньше предварительно определенного порогового значения между касательной LA к первому пути P1 движения в точке p1 и касательной LB ко второму пути P2 движения в точке p2, имеющей кратчайшее расстояние до точки p1, как показано на фиг. 7. Таким образом, путь движения может переключаться с первого пути P1 движения на второй путь P2 движения, когда направления (ориентации) первого пути P1 движения и второго пути P2 движения имеют сходство, чтобы обеспечить плавное переключение с первого пути P1 движения на второй путь P2 движения, избегая, например, внезапного переключения с криволинейного участка на прямой участок.
[0077]
Когда блок 13 сравнения путей определяет, что первый путь P1 движения и второй путь P2 движения не имеют сходства, блок 11 генерирования первого пути снова генерирует первый путь P1 движения, так что первый путь P1 движения и второй путь P2 движения имеют сходство для соответствия условию переключения. Это может препятствовать тому, чтобы рассматриваемое транспортное средство потерпело неудачу в переключении с первого пути P1 движения на второй путь P2 движения.
[0078]
Определяется, имеют ли сходство текущая скорость рассматриваемого транспортного средства C1 и расчетная скорость при движении по второму пути P2 движения, чтобы определить, может ли рассматриваемое транспортное средство C1 изменять текущую скорость, чтобы следовать расчетной скорости при движении по второму пути Р2 движения при переключении с первого пути Р1 движения на второй путь Р2 движения. Когда определено, что рассматриваемое транспортное средство C1 способно изменить текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, первый путь P1 движения переключается на второй путь P2 движения. Это позволяет плавно переключаться с первого пути P1 движения на второй путь P2 движения также с точки зрения скорости.
[0079]
Когда определено, что рассматриваемое транспортное средство C1 неспособно изменять текущую скорость, чтобы следовать расчетной скорости при движении по второму пути P2 движения, управление ускорением/замедлением выполняется на рассматриваемом транспортном средстве C1, чтобы приблизить скорость рассматриваемого транспортного средства C1 к расчетной скорости при движении по второму пути P2 перед переключением с первого пути P1 движения на второй путь P2 движения. Управление ускорением/замедлением также выполняется после определения того, что путь движения не может быть переключен, с тем чтобы уменьшить вероятность неудачи при переключении пути движения соответствующим образом.
[0080]
Текущая скорость рассматриваемого транспортного средства C1 сравнивается с расчетной скоростью при движении по второму пути P2 движения в самой дальней точке от рассматриваемого транспортного средства C1 либо в первом пути P1 движения, либо во втором пути P2 движения, имеющем более короткое расстояние, чтобы определить, что рассматриваемое транспортное средство C1 может следовать расчетной скорости, когда ускорение или замедление, необходимое для изменения текущей скорости рассматриваемого транспортного средства C1 на расчетную скорость, меньше предварительно определенного порогового значения. Поскольку путь движения переключается, когда выполняется управление ускорением/замедлением, чтобы позволить рассматриваемому транспортному средству C1 следовать расчетной скорости, прежде чем достигнуть самой дальней точки от рассматриваемого транспортного средства C1 либо в первом пути P1 движения, либо во втором пути P2 движения с более коротким расстоянием, можно избежать внезапного ускорения или замедления, обеспечивая плавное переключение.
[0081]
(Модифицированные примеры)
Вариант осуществления настоящего изобретения дополнительно иллюстрируется ниже с помощью модифицированных примеров, в которых рассматриваемое транспортное средство, движущееся на участке, не охватываемом информацией карты высокой четкости, въезжает на участок, покрытый информацией карты высокой четкости. Фиг. 11A иллюстрирует случай, в котором дорога с двумя полосами движения в каждом направлении, включая полосы L1, L2, L3 и L4, параллельные друг другу, пересекается с другой дорогой на перекрестке. Случай, показанный на фиг. 11A включает в себя участок S1, не охватываемый информацией карты высокой четкости перед перекрестком (область без штриховки), и участок S2, охватываемый информацией карты высокой четкости перед перекрестком (область со штриховкой). Блок 11 генерирования первого пути генерирует первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2, когда рассматриваемое транспортное средство C1 движется на участке S1, не охватываемом информацией карты высокой четкости. Блок 12 генерирования второго пути не генерирует второй путь P2 движения из-за отсутствия информации карты высокой четкости. Блок 16 переключения пути определяет, что рассматриваемому транспортному средству C1 не нужно переключать путь движения для следования с первого пути P1 движения на второй путь P2 движения. Рассматриваемое транспортное средство C1 движется, следуя по первому пути P1 движения.
[0082]
Как показано на фиг. 11B, рассматриваемое транспортное средство C1, движущееся на участке S1, не охваченном информацией карты высокой четкости, затем въезжает на участок S2, охваченный информацией карты высокой четкости. Блок 11 генерирования первого пути продолжает генерировать первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2. Блок 12 генерирования второго пути генерирует второй путь P2 движения, поскольку присутствует информация карты высокой четкости. Блок 16 переключения пути определяет, что необходимо переключение пути движения для следования с первого пути P1 движения на второй путь P2 движения. Блок 13 сравнения путей определяет, имеют ли сходство первый путь P1 движения и второй путь P2 движения. Когда определено, что первый путь P1 движения и второй путь P2 движения имеют сходство, блок 16 переключения пути переключает путь движения для следования с первого пути P1 движения на второй путь P2 движения.
[0083]
Фиг. 12A иллюстрирует случай, в котором рассматриваемое транспортное средство C1 делает левый поворот на перекрестке (T–перекресток), следуя за предшествующим транспортным средством C2. Блок 11 генерирования первого пути генерирует первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2, когда рассматриваемое транспортное средство C1 движется на участке S1, не охватываемом информацией карты высокой четкости (область без штриховки). Блок 12 генерирования второго пути не генерирует второй путь P2 движения из–за отсутствия информации карты высокой четкости. Блок 16 переключения пути определяет, что рассматриваемому транспортному средству C1 не нужно переключать путь движения для следования с первого пути P1 движения на второй путь P2 движения. Рассматриваемое транспортное средство C1 движется, следуя по первому пути P1 движения.
[0084]
Как показано на фиг. 12B, рассматриваемое транспортное средство C1, движущееся на участке S1, не охватываемом информацией карты высокой четкости, затем поворачивается влево, чтобы въезжать на участок S2, охватываемый информацией карты высокой четкости (область со штриховкой). Блок 11 генерирования первого пути продолжает генерировать первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2. Блок 12 генерирования второго пути генерирует второй путь P2 движения, поскольку присутствует информация карты высокой четкости. Блок 16 переключения пути определяет, что необходимо переключение пути движения для следования с первого пути P1 движения на второй путь P2 движения. Блок 13 сравнения путей определяет, имеют ли сходство первый путь P1 движения и второй путь P2 движения. Когда определено, что первый путь P1 движения и второй путь P2 движения имеют сходство, блок 16 переключения пути переключает путь движения для следования с первого пути P1 движения на второй путь P2 движения.
[0085]
Фиг. 13A иллюстрирует случай, в котором рассматриваемое транспортное средство C1, движущееся по дороге с двумя полосами движения, выполняет смену полосы движения с полосы L1 движения на левой стороне на полосу L2 движения на правой стороне, следуя предшествующему транспортному средству C2. Блок 11 генерирования первого пути генерирует первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2, когда рассматриваемое транспортное средство C1 движется на участке S1, не охватываемом информацией карты высокой четкости (область без штриховки). Блок 12 генерирования второго пути не генерирует второй путь P2 движения из–за отсутствия информации карты высокой четкости. Блок 16 переключения пути определяет, что рассматриваемому транспортному средству C1 не нужно переключать путь движения для следования с первого пути P1 движения на второй путь P2 движения. Рассматриваемое транспортное средство C1 движется, следуя первому пути P1 движения.
[0086]
Как показано на фиг. 13B, рассматриваемое транспортное средство C1, движущееся на участке S1, не охваченном информацией карты высокой четкости, затем въезжает на участок S2, охваченный информацией карты высокой четкости (область со штриховкой). Блок 11 генерирования первого пути продолжает генерировать первый путь P1 движения на основе траектории движения предшествующего транспортного средства C2. Блок 12 генерирования второго пути генерирует второй путь P2 движения, поскольку присутствует информация карты высокой четкости. Блок 16 переключения пути определяет, что необходимо переключение пути движения для следования с первого пути P1 движения на второй путь P2 движения. Блок 13 сравнения путей определяет, имеют ли сходство первый путь P1 движения и второй путь P2 движения. Когда определено, что первый путь P1 движения и второй путь P2 движения имеют сходство, блок 16 переключения пути переключает путь движения для следования с первого пути P1 движения на второй путь P2 движения.
[0087]
В соответствии с модифицированными примерами варианта осуществления настоящего изобретения переключение с первого пути P1 движения на второй путь P2 движения может быть выполнено плавно, когда рассматриваемое транспортное средство, движущееся на участке S1, не покрытом информацией карты высокой четкости, въезжает на участок S2, покрытый информацией карты высокой четкости. Хотя соответствующие модифицированные примеры варианта осуществления настоящего изобретения были проиллюстрированы на примере генерирования второго пути P2 движения после въезда на участок S2, охватываемый информацией карты высокой четкости, второй путь P2 движения может быть сгенерирован до въезда на участок S2, охватываемый информацией карты высокой четкости, чтобы выполнить обработку определения сходства между первым путем P1 движения и вторым путем P2 движения. Когда первый путь P1 движения и второй путь P2 движения предварительно определены как имеющие сходство в точке, в которой участок S1, не охватываемый информацией карты высокой четкости, переключается на участок S2, охватываемый информацией карты высокой четкости, первый путь P1 движения может быть переключен на второй путь P2 движения сразу после того, как рассматриваемое транспортное средство C1 въезжает на участок S2, покрытый информацией карты высокой четкости.
[0088]
(Другие варианты осуществления)
Хотя настоящее изобретение было описано выше со ссылкой на вариант осуществления, следует понимать, что настоящее изобретение не предназначено для ограничения описаниями и чертежами, составляющими часть этого раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники в соответствии с этим раскрытием.
[0089]
Например, рассматриваемое транспортное средство C1 может двигаться по дороге, имеющей заранее определенную структуру дороги, такую как перекресток, требующий поворота вправо или влево, требующий остановки перед линией остановки, имеющий светофор или вызывающий скученность многих транспортных средств, по которой трудно или невозможно перемещаться, следуя первой траектории P1 движения на основе траектории предшествующего транспортного средства C2 или окружения, обнаруженного датчиком 3 периферии, и вызывает увеличение нагрузки обнаружения датчика 3 периферии. При движении по дороге, имеющей такую заранее определенную структуру дороги, может быть эффективным следовать второму пути P2 движения на основе информации карты высокой четкости. Переключение с первого пути P1 движения на второй путь P2 движения в заранее определенной структуре дороги, в которой эффективен второй путь P2 движения, может обеспечить стабильное движение и может дополнительно снизить нагрузку обнаружения датчика 3 периферии. При движении по дороге, имеющей структуру дороги, относительно простую для следования, такой как скоростная дорога, рассматриваемое транспортное средство C1 может следовать первому пути P1 движения на основе траектории предшествующего транспортного средства C2 или окружения рассматриваемого транспортного средства C1, обнаруженного датчиком 3 периферии. Однако следование второму пути P2 движения на основе информации карты высокой четкости может обеспечить более стабильное движение, одновременно уменьшая нагрузку обнаружения датчика 3 периферии.
[0090]
Следует понимать, что настоящее изобретение включает в себя различные варианты осуществления, не раскрытые в данном документе. Следовательно, технический объем настоящего изобретения определяется только предметом в соответствии с формулой изобретения, разумно полученной из предшествующего описания.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0091]
1 СХЕМА ОБРАБОТКИ
2 ДАТЧИК ТРАНСПОРТНОГО СРЕДСТВА
3 ДАТЧИК ПЕРИФЕРИИ
4 ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО
5 ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС
6 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
7 УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
11 БЛОК ГЕНЕРИРОВАНИЯ ПЕРВОГО ПУТИ
12 БЛОК ГЕНЕРИРОВАНИЯ ВТОРОГО ПУТИ
13 БЛОК СРАВНЕНИЯ ПУТЕЙ
14 БЛОК ПОЛУЧЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА
15 БЛОК СРАВНЕНИЯ СКОРОСТИ
16 БЛОК ПЕРЕКЛЮЧЕНИЯ ПУТИ
17 БЛОК УПРАВЛЕНИЯ ПРЕДСТАВЛЕНИЕМ
21 ПРИЕМНИК GNSS
22 ДАТЧИК СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА
23 ДАТЧИК УСКОРЕНИЯ
24 ГИРОДАТЧИК
31 КАМЕРА
32 РАДАР
33 УСТРОЙСТВО СВЯЗИ
41 БЛОК ХРАНЕНИЯ ИНФОРМАЦИИ КАРТЫ НАВИГАЦИИ
42 БЛОК ХРАНЕНИЯ ИНФОРМАЦИИ КАРТЫ ВЫСОКОЙ ЧЕТКОСТИ
51 УСТРОЙСТВО ВВОДА
52 ДИСПЛЕЙ
53 ГРОМКОГОВОРИТЕЛЬ
61 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ
62 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ТОРМОЗА
63 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ
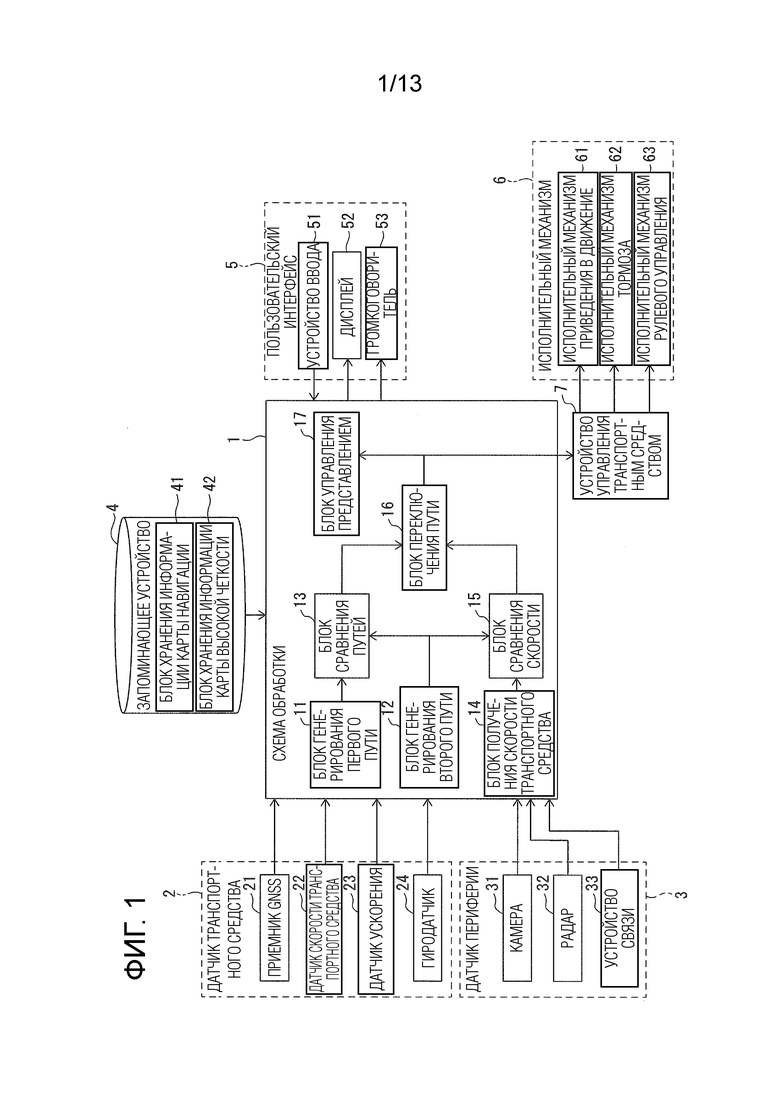
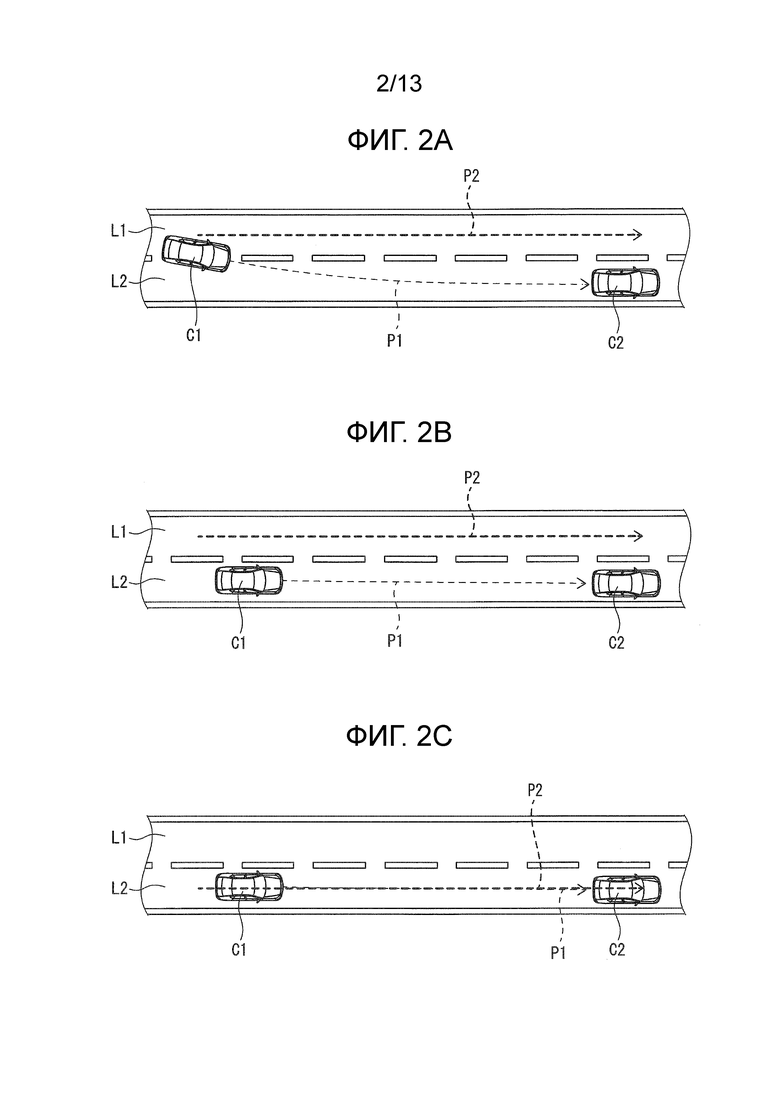
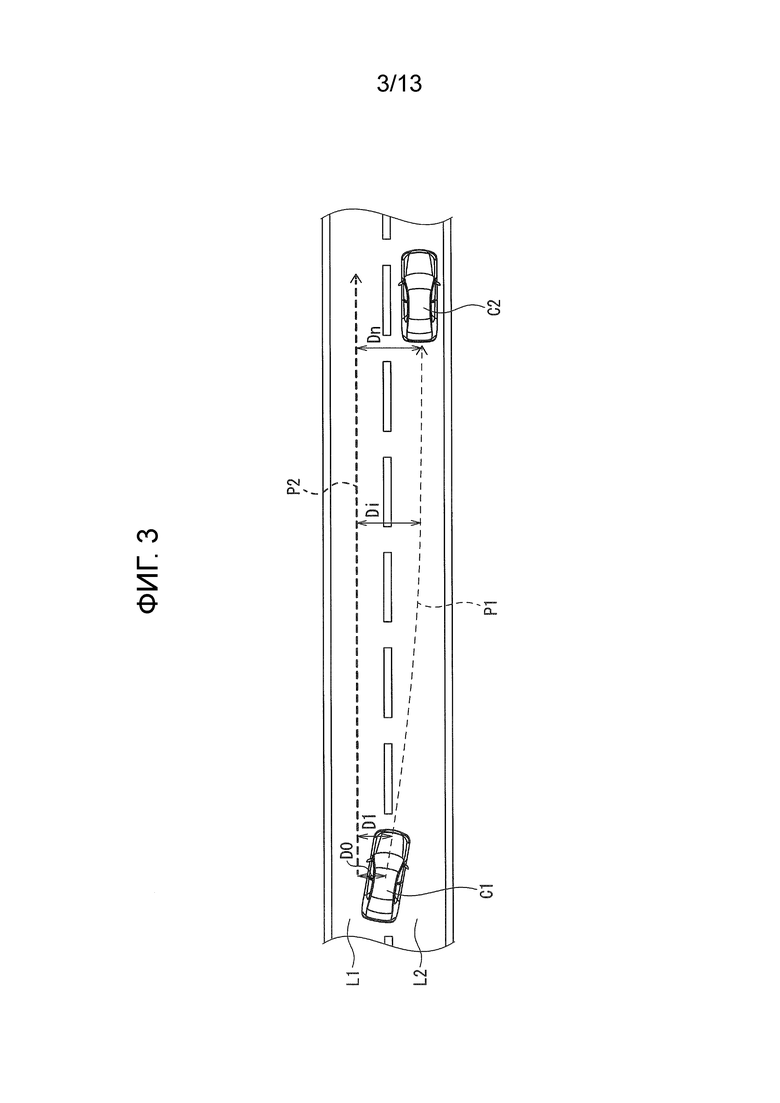
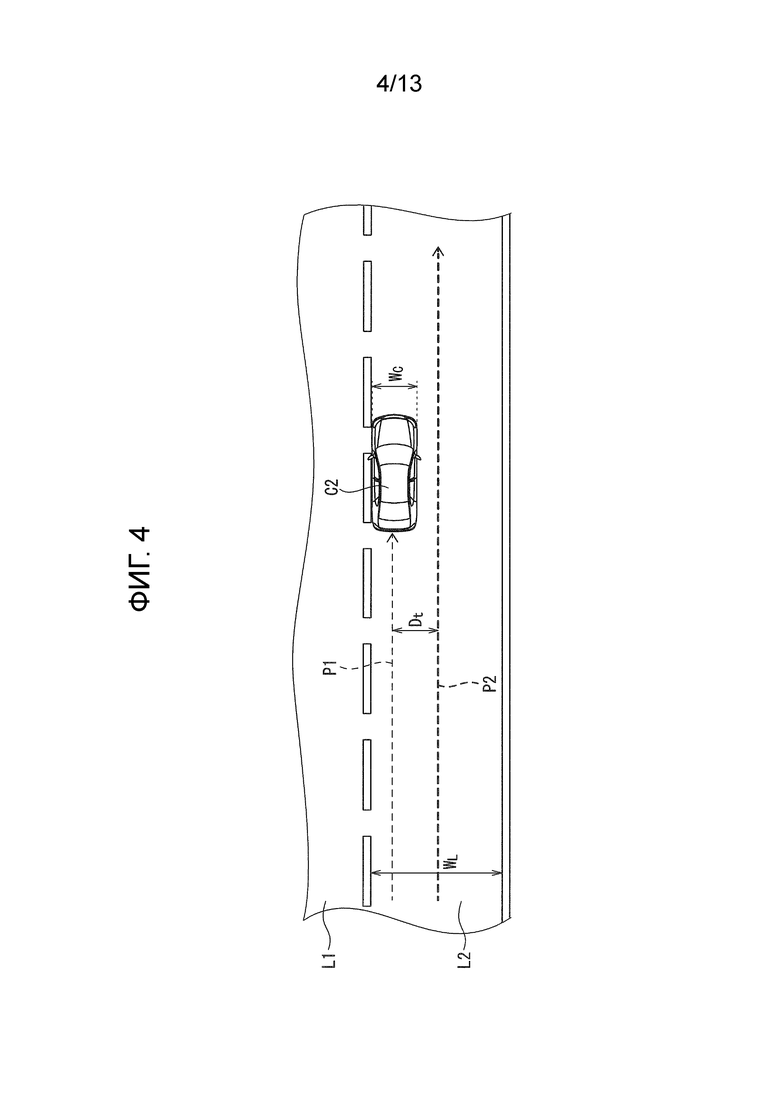
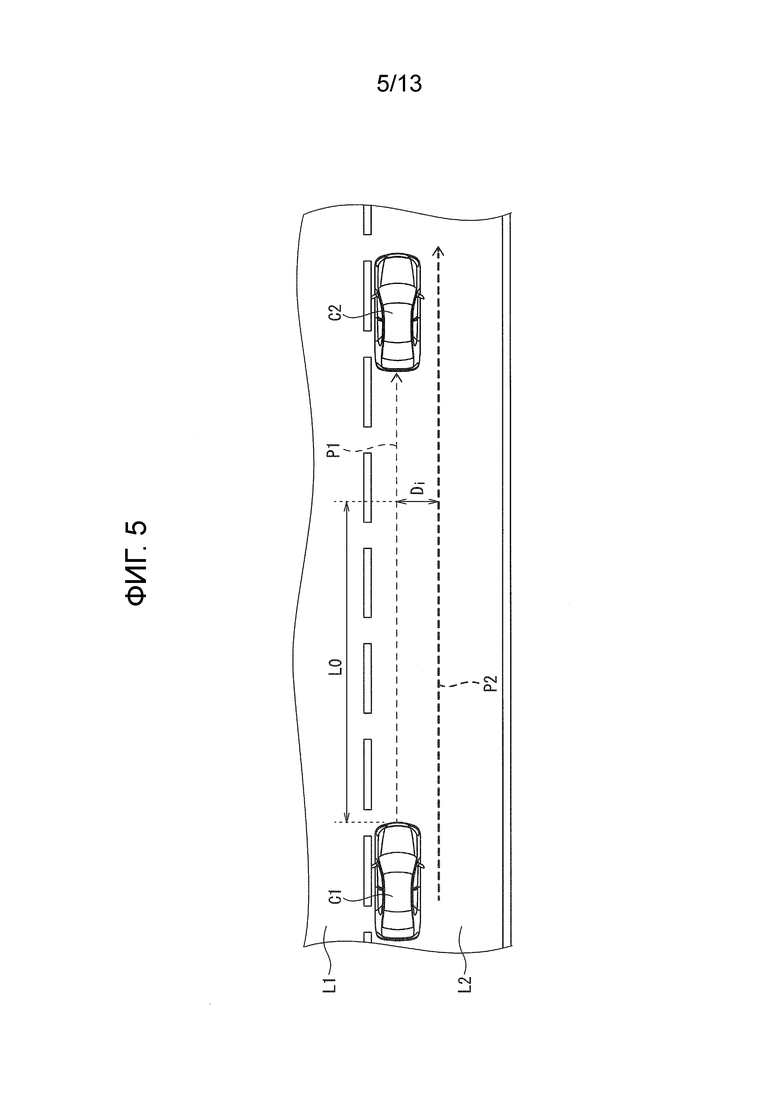
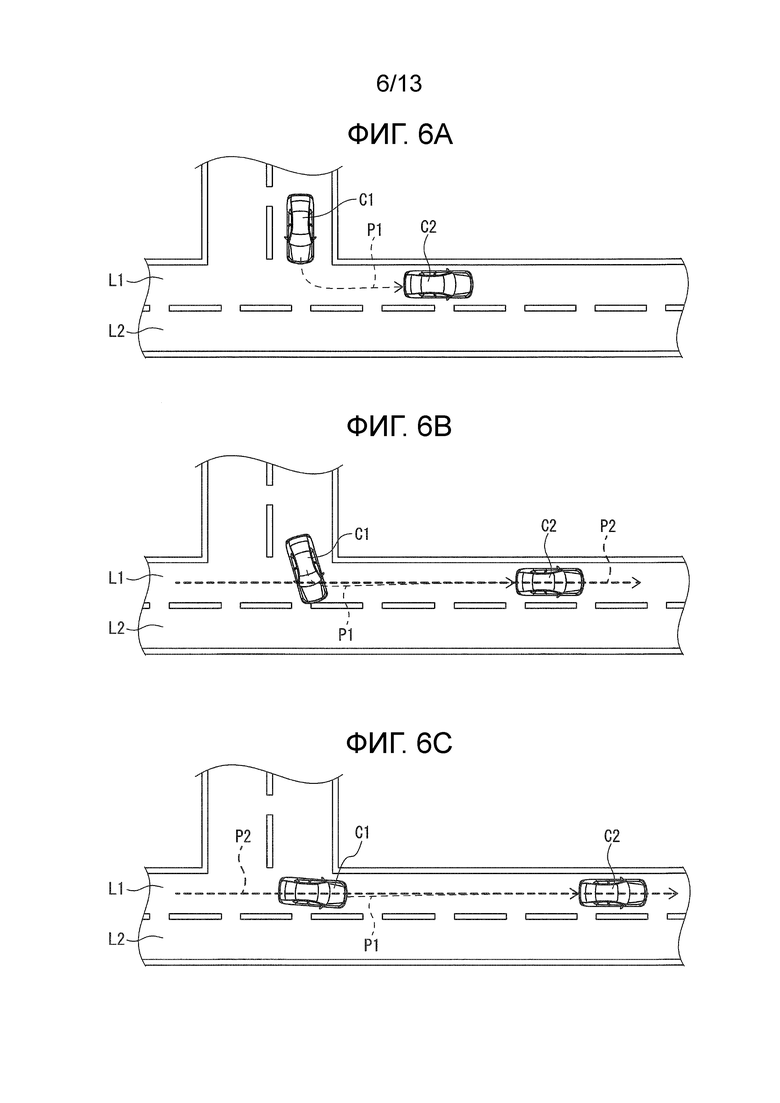
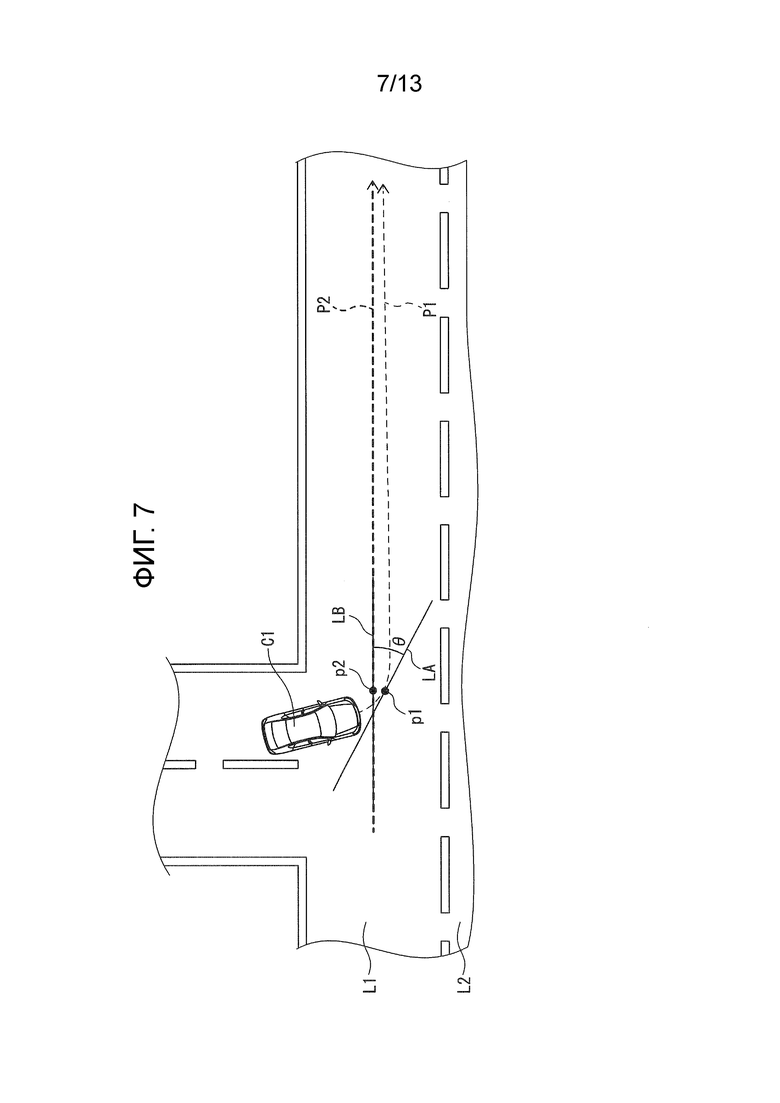
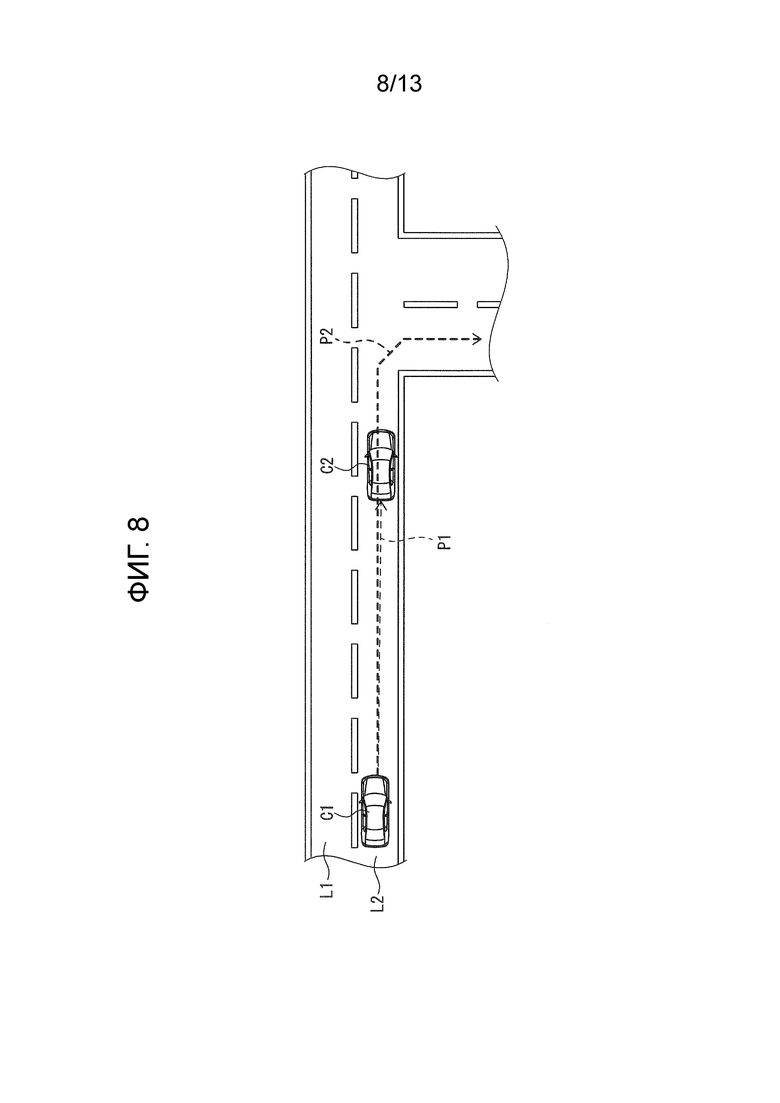
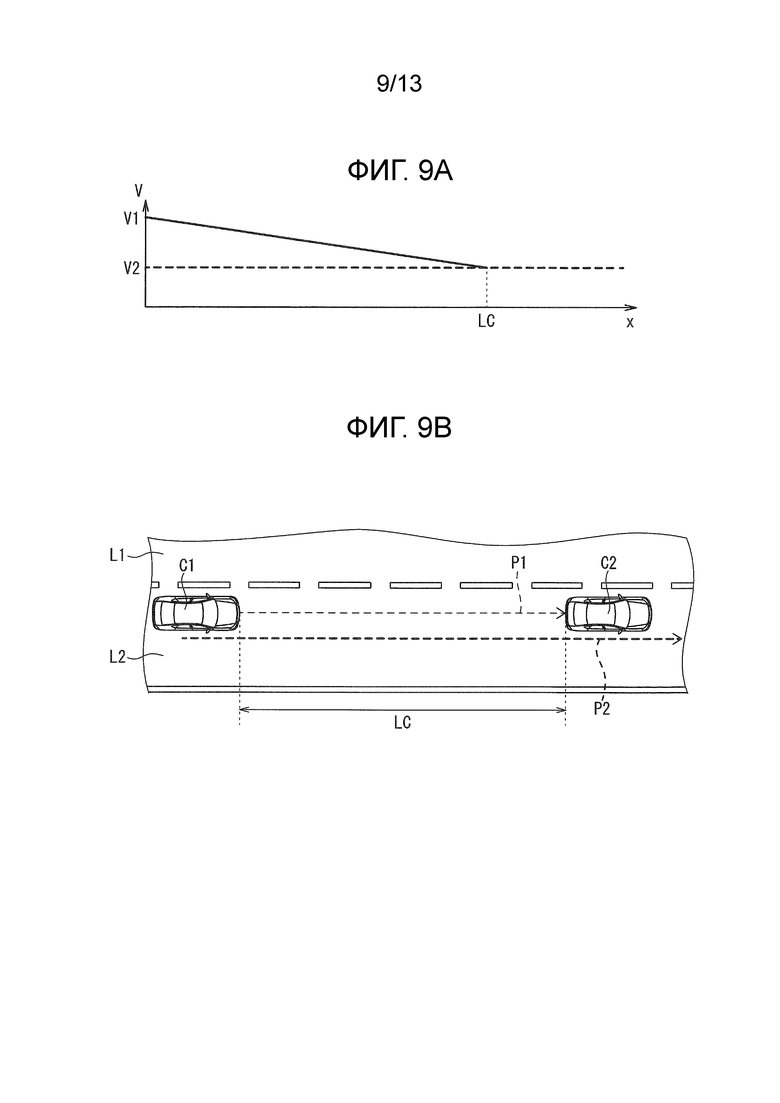
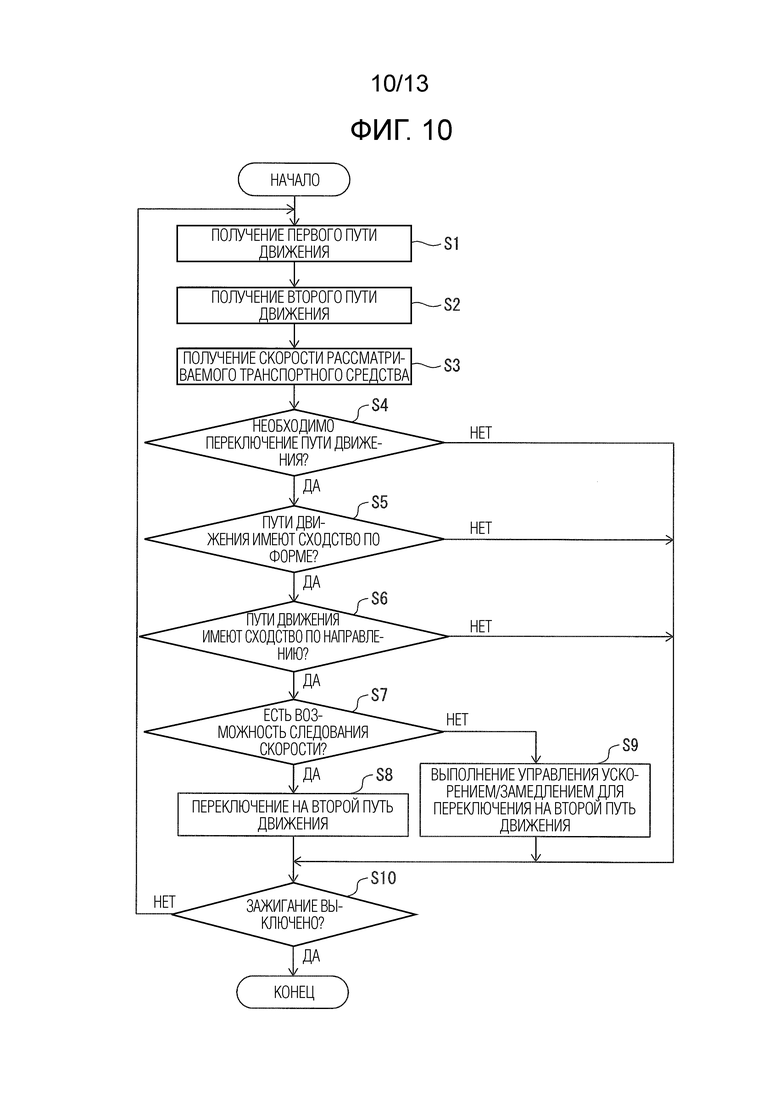
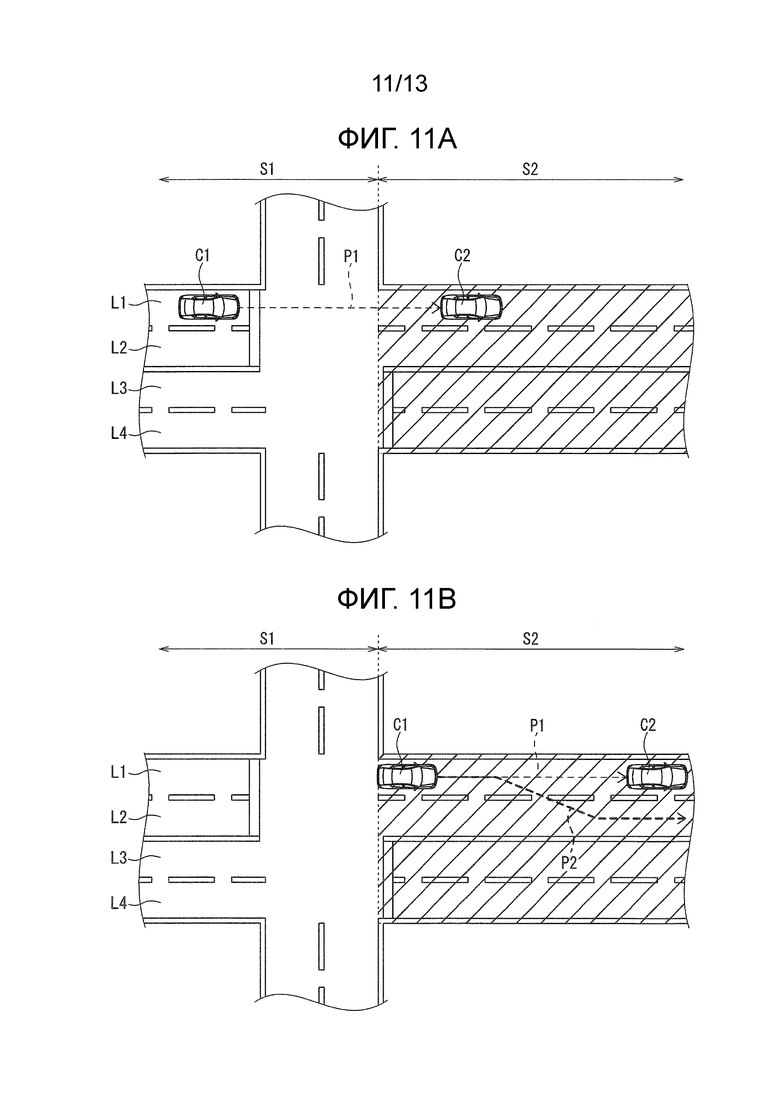
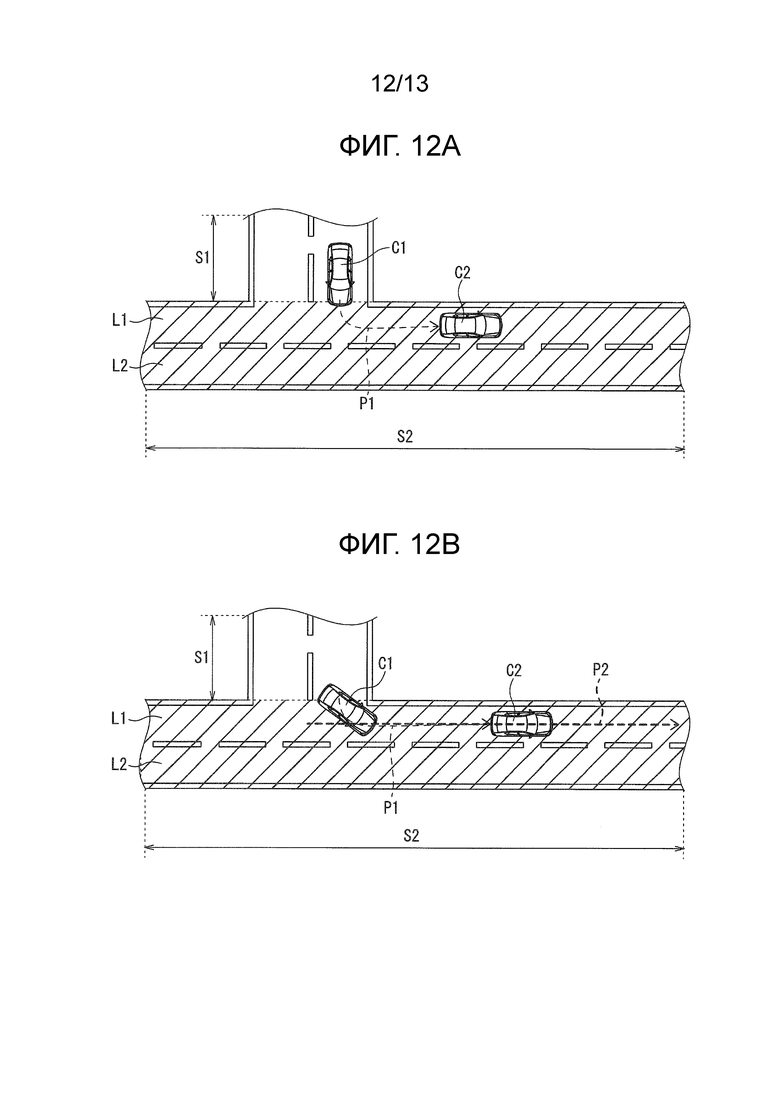
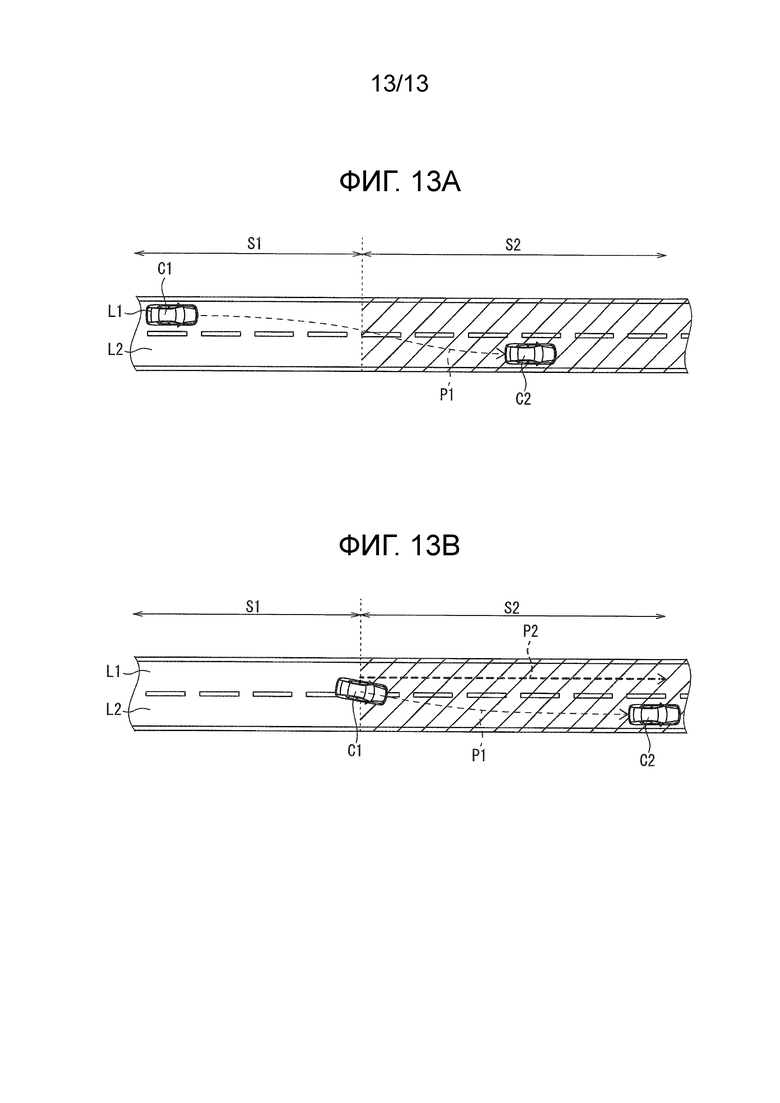
Изобретение относится к способу и устройству содействия движению. Способ содействия движению включает в себя этапы, на которых обнаруживают окружение транспортного средства, генерируют первый путь движения на основе окружения и выполняют управление содействием движению транспортного средства на основе первого пути движения, генерируют второй путь движения на основе информации карты вблизи окрестности транспортного средства, определяют, что первый путь движения и второй путь движения имеют сходство, и переключают путь движения, по которому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство. Первый и второй пути движения имеют сходство, когда расхождение между ними меньше предварительно определенного порогового значения в точке, имеющей расстояние от транспортного средства, большее или равное расстоянию точки наблюдения передней стороны. Достигается повышение безопасности управления транспортным средством. 10 н. и 3 з.п. ф-лы, 21 ил. 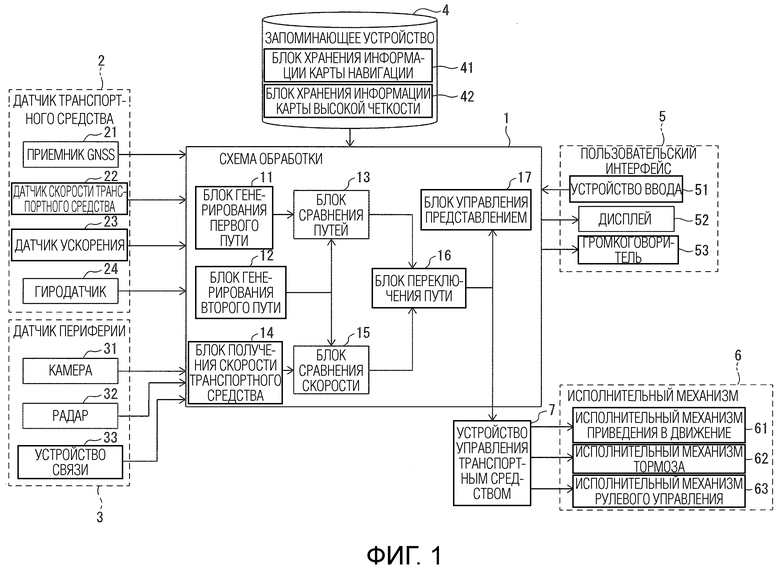
1. Способ содействия движению транспортного средства, включающий в себя этапы, на которых:
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь движения на основе упомянутого окружения; и
выполняют управление содействием движению рассматриваемого транспортного средства на основе первого пути движения,
причем способ содержит этапы, на которых:
генерируют второй путь движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства;
определяют, что первый путь движения и второй путь движения имеют сходство, когда расхождение между первым путем движения и вторым путем движения меньше предварительно определенного порогового значения в точке, имеющей расстояние от рассматриваемого транспортного средства, большее или равное расстоянию точки наблюдения передней стороны; и
переключают путь движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство.
2. Способ содействия движению транспортного средства, включающий в себя этапы, на которых:
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь движения на основе упомянутого окружения; и
выполняют управление содействием движению рассматриваемого транспортного средства на основе первого пути движения,
причем способ содержит этапы, на которых:
генерируют второй путь движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства;
определяют, что первый путь движения и второй путь движения имеют сходство, когда угол между касательными к первому и второму путям движения в точках, имеющих минимальное расстояние друг от друга, меньше предварительно определенного порогового значения; и
переключают путь движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство.
3. Способ содействия движению транспортного средства, включающий в себя этапы, на которых:
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь движения на основе упомянутого окружения; и
выполняют управление содействием движению рассматриваемого транспортного средства на основе первого пути движения,
причем способ содержит этапы, на которых:
генерируют второй путь движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства;
определяют, имеют ли первый путь движения и второй путь движения сходство;
переключают путь движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство; и
снова генерируют первый путь движения, когда первый путь движения и второй путь движения определены как не имеющие сходства.
4. Способ содействия движению транспортного средства, включающий в себя этапы, на которых:
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь движения на основе упомянутого окружения; и
выполняют управление содействием движению рассматриваемого транспортного средства на основе первого пути движения,
причем способ содержит этапы, на которых:
генерируют второй путь движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства;
определяют, имеют ли первый путь движения и второй путь движения сходство;
переключают путь движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство;
получают текущую скорость рассматриваемого транспортного средства и расчетную скорость при движении по второму пути движения и определяют, может ли рассматриваемое транспортное средство изменять текущую скорость для следования расчетной скорости при переключении с первого пути движения на второй путь движения; и
переключают с первого пути движения на второй путь движения, когда рассматриваемое транспортное средство определено как способное следовать расчетной скорости.
5. Способ содействия движению транспортного средства, включающий в себя этапы, на которых:
обнаруживают окружение рассматриваемого транспортного средства;
генерируют первый путь движения на основе упомянутого окружения; и
выполняют управление содействием движению рассматриваемого транспортного средства на основе первого пути движения,
причем способ содержит этапы, на которых:
генерируют второй путь движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства;
определяют, имеют ли первый путь движения и второй путь движения сходство; и
переключают путь движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство;
причем первый путь движения переключается на второй путь движения, когда рассматриваемое транспортное средство движется по структуре дороги, трудной или невозможной для движения посредством следования первому пути движения.
6. Способ содействия движению транспортного средства по любому из пп. 1–5, дополнительно содержащий этап, на котором определяют, присутствует ли информация карты, охватывающая дорогу, по которой движется рассматриваемое транспортное средство,
причем второй путь движения на основании информации карты вблизи окрестности рассматриваемого транспортного средства генерируется, когда информация карты присутствует.
7. Способ содействия движению транспортного средства по п. 4, дополнительно содержащий этап, на котором выполняют управление ускорением/замедлением на рассматриваемом транспортном средстве, чтобы приблизить текущую скорость к расчетной скорости перед переключением с первого пути движения на второй путь движения, когда рассматриваемое транспортное средство определено как неспособное следовать расчетной скорости.
8. Способ содействия движению транспортного средства по п. 4 или 7, в котором рассматриваемое транспортное средство определено как способное следовать расчетной скорости в точке, самой дальней от рассматриваемого транспортного средства, когда ускорение или замедление меньше предварительно определенного порогового значения, необходимого для изменения текущей скорости до расчетной скорости до достижения самой дальней точки на участке, в котором первый и второй пути движения перекрываются друг с другом.
9. Устройство содействия движению транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружения рассматриваемого транспортного средства; и
блок генерирования первого пути, выполненный с возможностью генерирования первого пути движения на основе упомянутого окружения, причем устройство выполнено с возможностью выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения,
при этом устройство содержит:
блок генерирования второго пути, выполненный с возможностью генерирования второго пути движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства; и
схему обработки, выполненную с возможностью определения того, что первый путь движения и второй путь движения имеют сходство, когда расхождение между первым путем движения и вторым путем движения меньше предварительно определенного порогового значения в точке, имеющей расстояние от рассматриваемого транспортного средства, большее или равное расстоянию точки наблюдения передней стороны, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство.
10. Устройство содействия движению транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружения рассматриваемого транспортного средства; и
блок генерирования первого пути, выполненный с возможностью генерирования первого пути движения на основе упомянутого окружения, причем устройство выполнено с возможностью выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения,
при этом устройство содержит:
блок генерирования второго пути, выполненный с возможностью генерирования второго пути движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства; и
схему обработки, выполненную с возможностью определения того, что первый путь движения и второй путь движения имеют сходство, когда угол между касательными к первому и второму путям движения в точках, имеющих минимальное расстояние друг от друга, меньше предварительно определенного порогового значения, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство.
11. Устройство содействия движению транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружения рассматриваемого транспортного средства; и
блок генерирования первого пути, выполненный с возможностью генерирования первого пути движения на основе упомянутого окружения, причем устройство выполнено с возможностью выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения,
при этом устройство содержит:
блок генерирования второго пути, выполненный с возможностью генерирования второго пути движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства; и
схему обработки, выполненную с возможностью определения того, имеют ли первый путь движения и второй путь движения сходство, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство; и
при этом схема обработки выполнена с возможностью снова генерировать первый путь движения, когда первый путь движения и второй путь движения определены как не имеющие сходства.
12. Устройство содействия движению транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружения рассматриваемого транспортного средства; и
блок генерирования первого пути, выполненный с возможностью генерирования первого пути движения на основе упомянутого окружения, причем устройство выполнено с возможностью выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения,
при этом устройство содержит:
блок генерирования второго пути, выполненный с возможностью генерирования второго пути движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства; и
схему обработки, выполненную с возможностью определения того, имеют ли первый путь движения и второй путь движения сходство, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство; и
при этом схема обработки выполнена с возможностью получать текущую скорость рассматриваемого транспортного средства и расчетную скорость при движении по второму пути движения, определять, может ли рассматриваемое транспортное средство изменять текущую скорость для следования расчетной скорости при переключении с первого пути движения на второй путь движения; и переключать с первого пути движения на второй путь движения, когда рассматриваемое транспортное средство определено как способное следовать расчетной скорости.
13. Устройство содействия движению транспортного средства, содержащее:
датчик, выполненный с возможностью обнаружения окружения рассматриваемого транспортного средства; и
блок генерирования первого пути, выполненный с возможностью генерирования первого пути движения на основе упомянутого окружения, причем устройство выполнено с возможностью выполнения управления содействием движению рассматриваемого транспортного средства на основе первого пути движения,
при этом устройство содержит:
блок генерирования второго пути, выполненный с возможностью генерирования второго пути движения на основе информации карты вблизи окрестности рассматриваемого транспортного средства; и
схему обработки, выполненную с возможностью определения того, имеют ли первый путь движения и второй путь движения сходство, и переключения пути движения, по которому рассматриваемому транспортному средству предписывается следовать посредством управления содействием движению, с первого пути движения на второй путь движения, когда первый путь движения и второй путь движения определены как имеющие сходство;
при этом схема обработки выполнена с возможностью переключать первый путь движения на второй путь движения, когда рассматриваемое транспортное средство движется по структуре дороги, трудной или невозможной для движения посредством следования первому пути движения.
| Токарный резец | 1924 |
|
SU2016A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |

