Изобретение относится к технике добычи нефти из скважин и может быть использовано для привода штанговых скважинных насосов.
Известен балансирный станок-качалка. Он содержит установленные на раме и связанные клиноременной передачей электродвигатель и редуктор, механизм для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока, состоящий из кривошипов, размещенных на выходном валу редуктора с двух сторон, шарнирно связанных с кривошипами шатунов, которые через траверсу связаны с подвижно установленным на стойке двуплечим качающимся балансиром с головкой, на которой закреплен гибкий элемент с подвеской устьевого штока (ГОСТ Р 51763-2001, Приводы штанговых скважинных насосов, ГОССТАНДАРТ РОССИИ, Москва, с.3, рис.1).
Известен также безбалансирный станок-качалка. Он содержит установленные на раме и связанные клиноременной передачей электродвигатель и редуктор, механизм для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока, состоящий из кривошипов, размещенных на выходном валу редуктора с двух сторон, шарнирно связанных с кривошипами шатунов, которые через траверсу связаны с гибким элементом, а последний через установленный на стойке направляющий шкив связан с подвеской устьевого штока (то же, с.4, рис.2).
Недостатком такого станка-качалки является то, что точка крепления шатуна на кривошипе совершает вращательное движение. Поэтому шатуны раскачиваются с большой амплитудой, возникают переменные усилия на шатунах, которые раскачивают металлоконструкцию станка-качалки.
К этим усилиям добавляются усилия от кривошипов с уравновешивающими грузами, которые вращаются в одной фазе, что также приводит к знакопеременным нагрузкам, действующим на металлоконструкцию, узлы и детали станка-качалки. Наличие траверсы, объединяющей шатуны, также является недостатком, поскольку усложняет конструкцию станка-качалки. Длина хода у такого станка-качалки равна сумме двух радиусов кривошипов, поэтому для получения достаточно большой длины хода (например 3 м) резко увеличиваются размеры радиусов кривошипов, масса уравновешивающих грузов и напряженность металлоконструкции станка-качалки. Наиболее неблагоприятно недостатки проявляются при большой частоте качаний.
Целью изобретения является создание станка-качалки, имеющего конструкцию, которая обеспечивает лучшие технические характеристики станка-качалки в части уменьшения нагрузок на узлы, детали и металлоконструкцию, снижение инерционных нагрузок от кривошипов при уравновешивании, создания лучших условий для получения большой длины хода и работы с большой частотой качаний.
Эта цель достигается тем, что в предлагаемом станке-качалке в качестве преобразующего механизма применен дифференциальный кривошипный механизм привода штангового скважинного насоса, обеспечивающий не вращательное, как у известных станков-качалок, а возвратно-поступательное движение точки крепления натяжного шкива на ведущем кривошипе.
При этом преобразующий механизм установлен на выходном валу редуктора с одной стороны. С этой же стороны установлена стойка станка-качалки с направляющим шкивом, причем ось стойки находится в вертикальной плоскости, проходящей через ось выходного вала редуктора. Кривошипы установлены так, что при их вертикальном положении они являются продолжением друг друга, радиусы кривошипов равны друг другу.
На ведущем кривошипе подвижно установлен натяжной шкив, который охватывается гибким элементом, и через подвижно установленный на стойке направляющий шкив связан с подвеской устьевого штока. При этом стойка станка-качалки устанавливается на расстоянии, когда гибкий элемент, связывающий натяжной шкив с направляющим шкивом, занимает вертикальное положение.
Кривошипы взаимосвязаны через планетарную передачу, вращаются в разные стороны с одинаковой частотой и при равенстве радиусов кривошипов в их относительном движении точка крепления натяжного шкива на ведущем кривошипе совершает прямолинейное возвратно-поступательное движение.
Поскольку точка крепления натяжного шкива на ведущем кривошипе перемещается возвратно-поступательно по вертикальной прямой, то радиусы кривошипов один раз складываются, когда они направлены вниз, а другой раз складываются когда они направлены вверх и поэтому длина хода такого станка-качалки ровна сумме четырех радиусов кривошипов. Длина хода нерегулируемая. Перенастройка станка-качалки на другую длину хода может быть осуществлена заменой кривошипов.
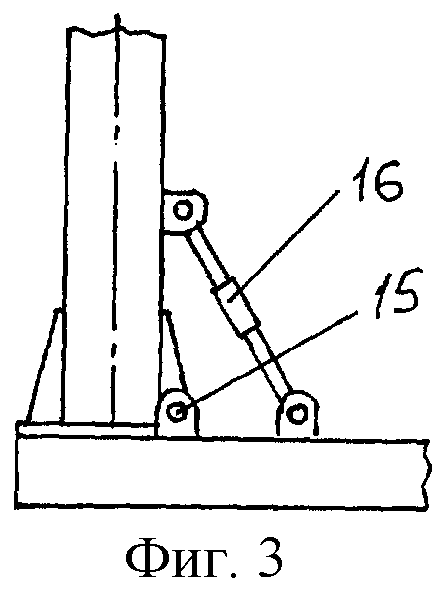
С целью обеспечения возможности проведения на скважине ремонтных работ, направляющий шкив на стойке станка-качалки устанавливается подвижно с возможностью поворота его вокруг вертикальной оси стойки на 90 град. С этой же целью предлагается вариант, когда стойка у основания имеет шарнир и растяжку с винтом, обеспечивающими возможность наклона ее вместе с направляющим шкивом, в сторону редуктора.
На фиг.1 схематично представлен предлагаемый станок-качалка, общий вид; на фиг.2 - вид сбоку, на котором кривошипы условно показаны в горизонтальном положении; на фиг.3 схематично представлен узел основания стойки с шарниром и растяжкой.
Станок-качалка содержит основание 1, тумбу 2, электродвигатель 3, связанный через клиноременную передачу 4 с редуктором 5, преобразующий дифференциальный кривошипный механизм, который установлен на выходном валу редуктора с одной стороны и содержит два взаимосвязанных через планетарную передачу кривошипа - центральный 6, жестко установленный на выходного валу редуктора 5, и ведущий кривошип 7, установленный на выходном валу центрального кривошипа 6. На ведущем кривошипе 7 установлен натяжной шкив 8, который охватывается гибким элементом 9 и через направляющий шкив 10, установленный на стойке 11, связан с подвеской устьевого штока 12. Радиусы центрального кривошипа 6 и ведущего кривошипа 7 равны между собой. Стойка 11 установлена на основании станка-качалки так, что ее ось находится в одной вертикальной плоскости с осью выходного вала редуктора 5, а гибкий элемент, связывающий натяжной шкив с направляющим шкивом, занимает вертикальное положение. Для уравновешивания станка-качалки на ведущем кривошипе установлены грузы 13, а на центральном грузы 14. Тормозное устройство и ограждения станка-качалки условно не показаны.
Станок-качалка, фиг.2, содержит шарнир 15, связывающий стойку с основанием станка-качалки и винтовую растяжку 16 с креплением ее через шарниры к стойке и основанию станка-качалки.
Станок-качалка работает следующим образом. Вращение от вала электродвигателя 3 посредством клиноременной передачи 4 через редуктор 5 передается центральному кривошипу 6. При вращении центрального кривошипа 6 за счет содержащейся в его корпусе цилиндрической планетарной передачи с центральным неподвижным колесом, которое жестко связано с корпусом редуктора 5 через его полый выходной вал, вращение передается на выходной вал центрального кривошипа и установленному на этом валу ведущему кривошипу с натяжным шкивом 8. При этом натяжной шкив 8 получает прямолинейное возвратно-поступательное движение, обеспечиваемое конструкцией примененного преобразующего механизма, и через гибкий элемент и направляющий шкив передает его подвеске устьевого штока. Уравновешивание станка-качалки производится с помощью грузов 13 и 14. При этом груз 13 на ведущем кривошипе 7 предназначен для уравновешивания тягового усилия станка-качалки, а груз 14 на центральном кривошипе для уравновешивания реакции от ведущего кривошипа на выходном валу центрального кривошипа. В тех случаях, когда величина груза 14 недостаточна для уравновешивания реакции от ведущего кривошипа, на корпус центрального кривошипа 6 от редуктора 5 передается дополнительный крутящий момент. В тех же случаях, когда величина груза 14 превышает величину, необходимую для уравновешивания реакции от ведущего кривошипа 7, через планетарную передачу центрального кривошипа 6 ведущему кривошипу 7 сообщается дополнительный крутящий момент. Изменение частоты качаний у предлагаемых станков-качалок производится как обычно за счет применения сменных шкивов клиноременной передачи. При выполнении ремонтных работ направляющий шкив на стойке поворачивают на 90 град или наклоняют стойку с сторону редуктора.
Достоинства предлагаемого станка-качалки:
1. Тяговое усилие на ветвях гибкого элемента со стороны подвески устьевого штока и со стороны ведущего кривошипа равны между собой. Поэтому стойка нагружена только вертикальными сжимающими ее усилиями. Поперечные, то есть действующие в горизонтальной плоскости усилия, свойственные балансирным и безбалансирным станкам-качалкам, отсутствуют.
Кривошипы вращаются встречно и поэтому их инерционные силы взаимно уравновешиваются, чего нет у балансирных и безбалансирных станков-качалок, у которых кривошипы вращаются в одну сторону и их инерционные силы не уравновешены.
В итоге, исходя из сказанного следует, что детали и узлы предлагаемого станка качалки менее нагружены, действующие усилия изначально уравновешены, конструкция не расшатывается переменными усилиями. Все это создает исключительно благоприятные условия для работы станков-качалок, в том числе и при большой частоте качаний.
2. Длина хода ровна сумме четырех радиусов кривошипов. Поэтому при в два раза меньшем значении радиуса кривошипа, чем у балансирных или безбалансирных станков-качалок, достигается та же длина хода. Отсюда лучшие условия для создания станков-качалок со сравнительно большой длиной хода (3...5 м.). Это достоинство явно проявляется, если учесть, что у балансирных станков-качалок для достижения хода, например, 3 м или достигнутого максимума 3,5 м применяется неравноплечий балансир с меньшим размером плеча со стороны редуктора, поэтому тяговое усилие на штоках значительно превышает тяговое усилие на гибком элементе со стороны подвески устьевого штока, а это не только повышает необходимый крутящий момент, передаваемый редуктором, но и в целом неблагоприятно для металлоконструкции.
3. Поскольку при той же длине хода, что и у известных станков-качалок, у предлагаемого станка-качалки радиус ведущего кривошипа в два раза меньший, то и масса уравновешивающего груза на ведущем кривошипе также требуется в два раза меньшая и поэтому суммарная масса грузов у предлагаемого станка-качалки не превышает массу грузов известных станков-качалок и даже меньше, если учесть, что усилие на натяжном шкиве равно усилию на подвеске устьевого штока, а также то, что масса центрального кривошипа увеличена за счет размещенной в его корпусе планетарной передачи.
Предполагается, что будет создан ряд станков-качалок с различными длинами ходов и потребитель сможет выбрать станок-качалку с требуемой ему длиной хода. При необходимости существенного изменения длины хода станок-качалка может быть перенастроен на другую длину хода за счет одновременной замены центрального и ведущего кривошипов, которые выступают в данном случае как сменные.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК-КАЧАЛКА | 2004 |
|
RU2270367C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2004 |
|
RU2267649C2 |
| СТАНОК-КАЧАЛКА | 2006 |
|
RU2308616C2 |
| ДИФФЕРЕНЦИАЛЬНО-БАЛАНСИРНЫЙ СТАНОК-КАЧАЛКА | 2007 |
|
RU2355914C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
| СТАНОК-КАЧАЛКА | 2009 |
|
RU2406874C1 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| МОБИЛЬНЫЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2479751C1 |

Устройство предназначено для использования в технике добычи нефти из скважин для привода глубинных штанговых насосов. В дифференциальном станке-качалке в качестве преобразующего механизма, применен дифференциальный кривошипный механизм, обеспечивающий не вращательное, а прямолинейное возвратно-поступательное движение точки крепления натяжного шкива на ведущем кривошипе. Преобразующий механизм установлен на выходном валу редуктора с одной стороны. С этой же стороны располагается стойка с направляющим шкивом, причем ось стойки находится в вертикальной плоскости, проходящей через ось выходного вала редуктора. Радиусы центрального и ведущего кривошипов равны друг другу. На ведущем кривошипе установлен натяжной шкив, который охватывается гибким элементом и через направляющий шкив, установленный на стойке, связан с подвеской устьевого штока. Кривошипы взаимосвязаны и вращаются в разные стороны. Длина хода равна сумме четырех радиусов кривошипов. Достигается большая длина хода при более рациональной конструкции. Применение станков-качалок наиболее эффективно при длине хода от 2,5 до 5 м. 2 з.п. ф-лы, 3 ил.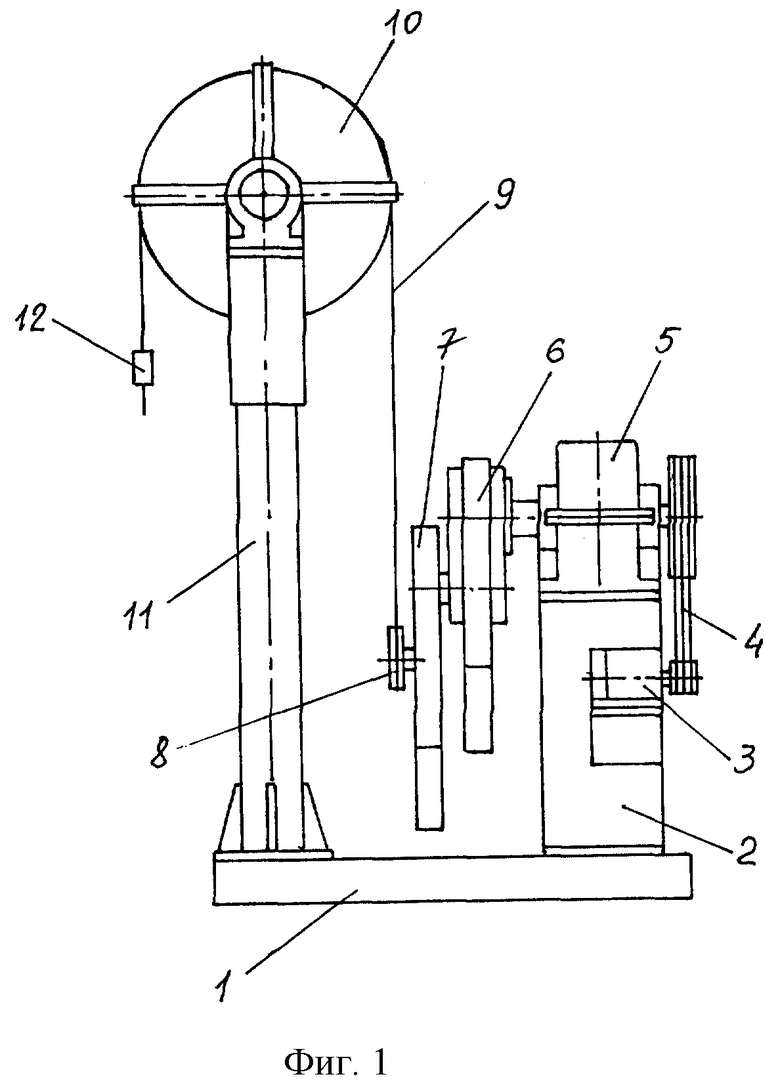
| Пресс для формования трубчатых керамических изделий с боковыми отверстиями | 1936 |
|
SU51763A1 |
| Госстандарт России | |||
| Привод штангового глубинного насоса | 1977 |
|
SU641157A1 |

