Изобретение относится к технике для добычи нефти из скважин и может быть использовано в приводах штанговых скважинных насосов для преобразования вращательного движения в возвратно-поступательное.
Известен кривошипный механизм для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока в безбалансирных приводах штанговых скважинных насосов. Этот механизм состоит из кривошипов с уравновешивающими грузами, установленных на выходном валу редуктора с двух сторон, шарнирно связанных с кривошипами шатунов, которые через траверсу связаны с гибким элементом, а последний, через установленный на стойке направляющий шкив, связан с подвеской устьевого штока [1]. Недостатком такого механизма является несколько меньшая, по сравнению с балансирными приводами, долговечность гибкого элемента, который находится в активном взаимодействии с направляющим шкивом.
Известен также кривошипный механизм для преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение подвески устьевого штока в балансирных приводах штанговых скважинный насосов [2]. Этот механизм состоит из кривошипов с уравновешивающими грузами, которые установлены на выходном валу редуктора с двух сторон, и шарнирно связанных с ними шатунов, которые через траверсу связаны с подвижно установленным на стойке двуплечим качающимся балансиром с головкой балансира, на которой закреплен гибкий элемент.
Недостатком такого преобразующего механизма является то, что он имеет сравнительно большой угол качания шатунов и поэтому, кроме полезной нагрузки тягового усилия на штоках, он создает также значительную знакопеременную горизонтальную силу (ориентировочно от 25% до 40% от усилий на штоках, в зависимости от длины хода), действующую через балансир на стойку, которое раскачивает конструкцию, ослабляет крепежные соединения. Кроме того, такой кривошипный механизм обеспечивает длину хода подвески устьевого штока, при равноплечем балансире, незначительно превышающую удвоенное значение радиуса кривошипа. Поэтому, для увеличения длины хода, применяют балансир с увеличенной длиной плеча со стороны подвески устьевого штока и меньшей со стороны редуктора, что неблагоприятно для конструкции, так как значительно возрастает требуемое тяговое усилие на шатунах.
Целью изобретения является создание кривошипного преобразующего механизма, обеспечивающего, при его применении, меньший угол качания шатуна, снижение действующих усилий, увеличение длины хода.
Эта цель достигается тем, что предлагаемый кривошипный механизм выполняется из двух кинематически взаимосвязанных кривошипов, которые устанавливаются с одной стороны редуктора. Причем в таком кривошипном механизме шатун один, и он устанавливается только на ведущем кривошипе. При этом обеспечивается прямолинейное возвратно-поступательное движение точки крепления шатуна при равенстве радиусов кривошипов, или возвратно-поступательное движение этой точки по сильно вытянутой эллипсообразной кривой, близкое к прямолинейному. В итоге снижается угол качания шатуна, и уменьшаются действующие усилия, создаются условия для увеличения длины хода.
Для того чтобы это обеспечить, один из кривошипов, центральный, установлен на выходном валу редуктора, и в его корпусе размещена цилиндрическая планетарная передача внешнего зацепления с неподвижным центральным колесом, находящемся, через паразитную шестерню, в зацеплении с сателлитом, снабженным выходным концом, на котором установлен другой, ведущий кривошип. Ведущий кривошип содержит опору для крепления шатуна с возможностью ее перестановки. При этом центральное колесо планетарной передачи установлено на оси, которая проходит через полый выходной вал редуктора и скрепляется с его корпусом.
При этом число зубьев неподвижного центрального колеса должно быть в два раза больше числа зубьев сателлита, а кривошипы установлены так, что при их вертикальном расположении радиусы кривошипов направлены в одну сторону и являются продолжением друг друга. При выполнении этих условий точка крепления шатуна на ведущем кривошипе, при относительном движении кривошипов, перемещается возвратно-поступательно по вертикальной прямой, в том случае, когда радиусы кривошипов равны друг другу, и по сильно вытянутой эллипсообразной кривой, когда радиусы кривошипов не равны.
При этом длина хода равна удвоенной сумме радиусов кривошипов, поскольку они один раз складываются на полную длину, когда находятся ниже оси выходного вала редуктора и направлены вниз, и другой раз, когда находятся выше оси выходного вала и направлены вверх. Поэтому, при одинаковой длине хода, радиусы кривошипов у предложенного кривошипного механизма в два раза меньше, чем у обычного кривошипного механизма, что благоприятно для получения большой длины хода.
Поскольку радиусы кривошипов могут быть не равны друг другу, то это позволяет производить регулировку длины хода путем перестановки опоры для крепления шатуна на ведущем кривошипе.
На фиг.1 схематично представлен предлагаемый дифференциальный кривошипный преобразующий механизм привода штангового скважинного насоса с редуктором в разрезе.
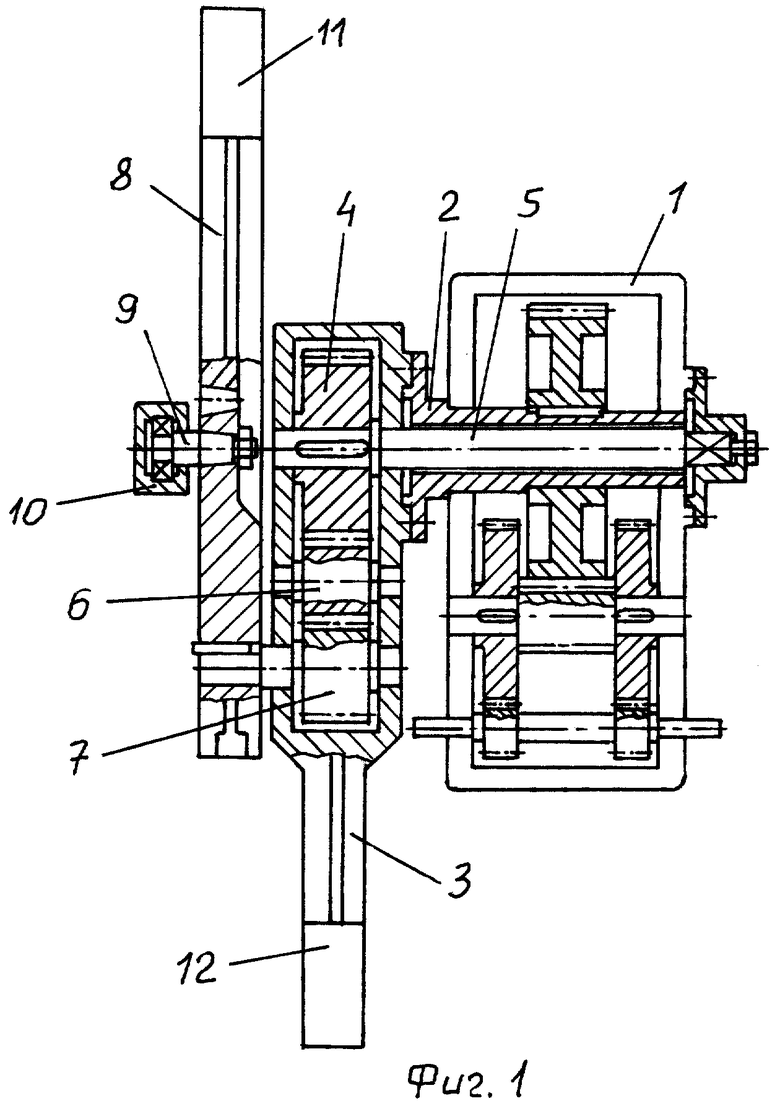
На фиг.2 представлена схема взаимодействия деталей дифференциального кривошипного преобразующего механизма, траектории движения крайних точек кривошипов.
Дифференциальный кривошипный преобразующий механизм состоит из редуктора 1 с полым выходным валом 2, установленного на выходном валу 2 центрального кривошипа 3. В корпусе кривошипа 3 размещена цилиндрическая планетарная передача внешнего зацепления, которая состоит из неподвижного центрального колеса 4, установленного на оси 5, которая проходит через полый вал 2 редуктора 1 и жестко крепится с корпусом редуктора 1. Центральное колесо 4 находится в зацеплении, через паразитную шестерню 6, с сателлитом 7. На выходном конце сателлита 7 установлен ведущий кривошип 8 с осью 9, на которой подвижно установлена опора шатуна 10. При этом число зубьев центрального колеса 4 в два раза больше числа зубьев сателлита 7, а кривошипы установлены так, что при их вертикальном расположении радиусы кривошипов направлены в одну сторону и являются продолжением друг друга. На кривошипах установлены уравновешивающие грузы 11 и 12.
Дифференциальный кривошипный преобразующий механизм работает следующим образом.
Вращательное движение с выходного вала 2, редуктора 1 передается центральному кривошипу 3, при вращении которого сателлит 7, через паразитную шестерню 6, обкатывается вокруг неподвижного центрального колеса 4 и вместе с установленным на выходном конце сателлита 7 ведущим кривошипом 8 вращается в противоположном, по отношению к центральному кривошипу 3, направлении. Так как число зубьев сателлита 7 в два раза меньше числа зубьев неподвижного центрального колеса 4, то, с учетом того что сателлит совершает планетарное движение за один оборот центрального кривошипа 3, сателлит 7, а вместе с ним и ведущий кривошип 8, также совершат один оборот. При равенстве радиусов кривошипов конец радиуса ведущего кривошипа 8 (точка крепления шатуна) находится в вертикальной плоскости, проходящей через ось выходного вала редуктора 1, и тогда, при встречном вращении кривошипов с одинаковой частотой, при сложении их движений, конец радиуса ведомого кривошипа 8 перемещается возвратно-поступательно по прямой вертикальной линии, фиг.2. Когда радиусы кривошипов не равны, тогда конец радиуса ведущего кривошипа перемещается по сильно вытянутой эллипсообразной кривой, фиг.2.
При этом, за один двойной ход преобразующего механизма, длина хода равна удвоенной сумме радиусов центрального и ведущего кривошипов, поскольку они складываются на полную длину один раз, когда оба находятся ниже оси выходного вала редуктора и направлены вниз, а другой раз, когда находятся выше оси редуктора и направлены вверх. Поэтому, при одинаковой длине хода, радиусы кривошипов у предложенного кривошипного механизма в два раза меньше, чем у обычного кривошипно-шатунного механизма. Соответственно в два раза увеличивается эффективность воздействия уравновешивающего груза на ведущем кривошипе на тяговое усилие на штоке. Это позволяет уравновесить привод штангового насоса грузом на ведущем кривошипе, в два раза меньшим, чем привод штангового насоса с известным кривошипным механизмом. При этом на центральном кривошипе возникает реакция, которая уравновешивается грузом, размещенным на этом кривошипе. Если же масса груза на центральном кривошипе больше, чем требуется для уравновешивания реакции, то возникает крутящий момент, который через планетарную передачу передается ведущему кривошипу и увеличивает тяговое усилие на штоке. То же происходит и при передаче крутящего момента центральному кривошипу от редуктора.
Таким образом, тяговое усилие на штоке, при неуравновешенном механизме, складывается из усилий от воздействия груза на ведущем кривошипе, а при его недостаточности усилий - от воздействия крутящего момента от массы груза на центральном кривошипе, превышающей массу груза, необходимую для уравновешивания реакции от ведущего кривошипа и крутящего момента, передаваемого редуктором.
В итоге можно сделать вывод, что предложенный дифференциальный кривошипный механизм, по сравнению с известным кривошипным механизмом, имеет большие возможности для получения большой длины хода, снижения действующих усилий, лучшего уравновешивания.
Все изложенные здесь особенности работы дифференциального кривошипного преобразующего механизма проверены на изготовленной модели (1:10) балансирного и безбалансирного станка-качалки.
Источники информации
1. ГОСТ Р 51763-2001, Приводы штанговых скважинных насосов. Общие технические требования. ГОССТАНДАРТ РОССИИ, Москва, с.4, рис.2;
2. То же, с.3, рис.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТАНОК-КАЧАЛКА | 2003 |
|
RU2265138C2 |
| СТАНОК-КАЧАЛКА | 2006 |
|
RU2308616C2 |
| СТАНОК-КАЧАЛКА | 2004 |
|
RU2270367C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2004 |
|
RU2267649C2 |
| ДИФФЕРЕНЦИАЛЬНО-БАЛАНСИРНЫЙ СТАНОК-КАЧАЛКА | 2007 |
|
RU2355914C2 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| СТАНОК-КАЧАЛКА | 2009 |
|
RU2406874C1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
| Зубчато-рычажная планетарная передача | 1979 |
|
SU892052A1 |
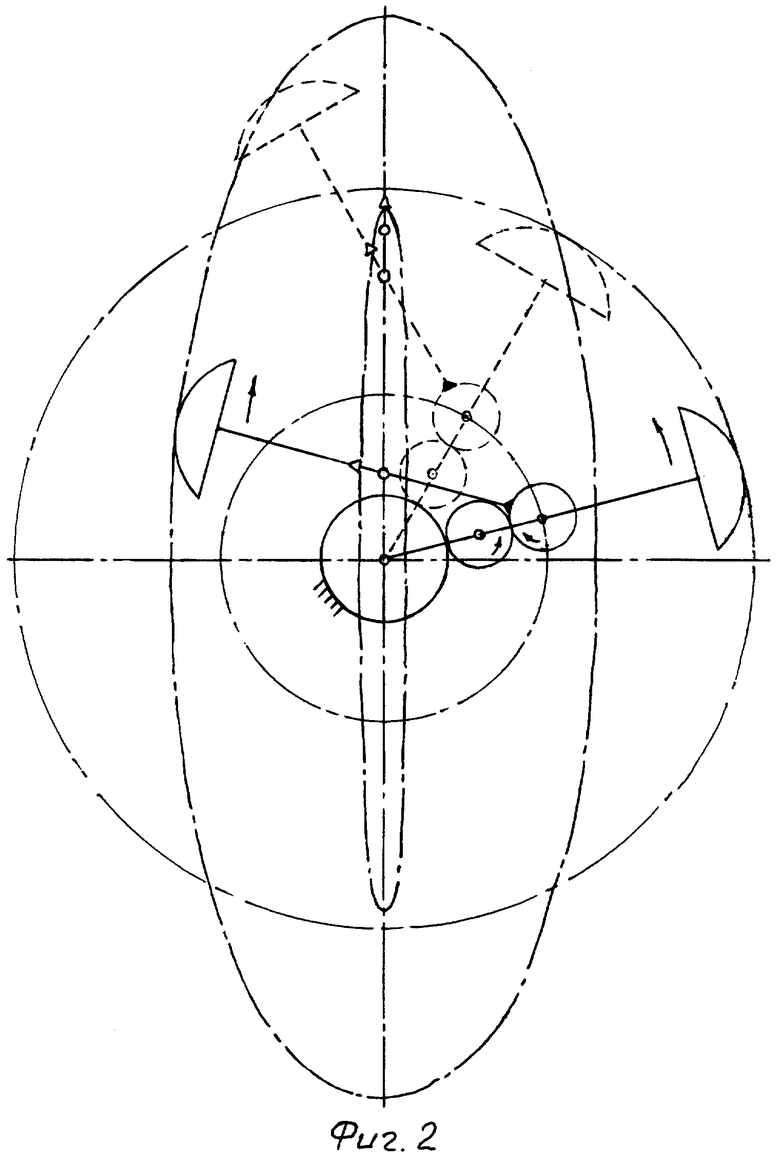
Изобретение относится к машиностроению и может быть использовано в приводах штанговых скважинных насосов для преобразования вращательного движения в возвратно-поступательное. Дифференциальный кривошипный механизм содержит цилиндрический редуктор 1, кинематически взаимосвязанные центральный 3 и ведущий 8 кривошипы, опору для крепления шатуна 10, уравновешивающие грузы 11, 12. Центральный кривошип 3 установлен на выходном валу 2 редуктора и содержит размещенную в своем корпусе планетарную передачу внешнего зацепления. Центральное колесо 4 планетарной передачи неподвижно установлено на оси 5, проходящей через полый вал 2 редуктора 1, и через паразитную шестерню 6 зацепляется с сателлитом 7. Ведущий кривошип 8 установлен на выходном конце сателлита 7 и содержит опору для крепления шатуна 10. Число зубьев центрального колеса 4 в два раза больше числа зубьев сателлита 7. Кривошипы 3 и 8 установлены так, что при их расположении в вертикальной плоскости их радиусы направлены в одну сторону и являются продолжением друг друга. Технический результат - снижение угла качания шатуна, снижение действующих усилий, увеличение длины хода. 2 з.п. ф-лы, 2 ил.
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1984 |
|
SU1193344A1 |
| Механизм для преобразования движения | 1984 |
|
SU1236237A1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| Кривошипно-ползунный механизм | 1980 |
|
SU1011937A1 |
| WO 02059503 A1, 01.08.2002 | |||
| US 4179942 A, 25.12.1979. | |||

