Изобретение относится к горному делу и разработано для увеличения темпов проходки вертикальных стволов, проводимых буровзрывным способом и достигаемых посредством автономности работы стволовой погрузочной машины с центральной подвеской относительно проходческого полка, а также для сокращения типоразмерного ряда радиальной рамы.
Предлагаемая стволовая погрузочная машина с центральной подвеской радиальной рамы и рукоятью, оснащенной управляемым грейфером, позволяет механизировать процессы погрузки и зачистки забоя ствола в последней фазе с возможностью применения одного типоразмера радиальной рамы для проходки стволов разного диаметра, а также изменения расстояния по высоте между стволовой погрузочной машиной и проходческим полком в процессе выполнения проходческого цикла.
Известны погрузочные машины Блайера и «Виктор» с центральной подвеской рамы грейфера по Н.А.Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.73, 74. Эти машины имеют раму, выполненную в виде опускающейся стрелы, подвешенной на шарнире к турели машины. Это является их основным достоинством.
Недостатки заключаются в том, что рама по конструкции выполнена жесткой и, следовательно, машина может применяться при проведении только одного диаметра ствола. Вторым недостатком является то, что шестилопастной грейфер подвешен на канате. Такая кинематическая связь с рамой (стрелой) не обеспечивает устойчивого положения грейфера на забое при зачерпывании горной массы различной крупности (грейфер опрокидывается).
Наиболее близкими по конструктивному устройству и принципу работы являются стволовые погрузочные машины КС-2у/40, 2КС-2у/40, КС-1МА, 2КС-1МА, а также КСМ-2у, известные по Н.А. Малевич. Машины и комплексы оборудования для проходки вертикальных стволов. М.: Недра, 1975, с.59-72. Все перечисленные машины, за исключением КСМ-2у, имеют сходную между собой центральную подвеску. Отличаются между собой количеством грейферов и конструкцией тельфера. КСМ-2у отличается от других машин тем, что шарнирная подвеска радиальной рамы располагается на опоре, расположенной на периферии проходческого полка. Все вышеназванные машины входят в качестве основных составных частей в комплексы для проведения вертикальных стволов, проводимых буровзрывным способом. Принцип работы всех машин в процесс выгрузки горной массы из забоя ствола одинаков.
Конструкции указанных машин имеют общие недостатки, которые выражаются в том, что, во-первых, при изменении диаметра ствола (помимо замены кольцевого монорельса) требуется всегда замена радиальной рамы; во-вторых, при задержке монтажных работ, выполняемых с верхнего этажа проходческого полка, погрузочные машины не имеют возможности следовать за опускающимся забоем разрушенной взрывной отбойкой горной массы. В этом случае значительно усложняется процесс управления грейфером как при захвате горной массы, так и при его разгрузке в бадью.
Третий недостаток состоит в том, что канатная подвеска грейфера не обеспечивает необходимого напорного усилия на отвал горной массы при зачерпывании, а также его устойчивость на забое. Эти недостатки возрастают по мере увеличения расстояния от кабины машиниста до грейфера. Указанные недостатки снижают производительность труда и, следовательно, темпы проходки стволов.
На основании вышеизложенного имеется необходимость в разработке конструктивной схемы стволовой погрузочной машины с центральной подвеской и входящей в состав проходческого комплекса, но имеющей возможность автономного вертикального перемещения относительно проходческого полка, являющегося основой проходческого комплекса. Такая стволовая погрузочная машина должна обеспечивать необходимые усилия для внедрения в отвал горной массы и обеспечивать его устойчивость на забое. Кроме того, конструкция машины должна обладать способностью осуществлять выгрузку горной массы в транспортные средства при проходке вертикальных стволов разного диаметра в определенном диапазоне без дополнительных монтажно-демонтажных работ.
Задачей настоящего изобретения является разработка конструкции стволовой погрузочной машины с центральной подвеской, позволяющей осуществлять с высокой эффективностью выгрузку горной массы на всю глубину разрушенной горной массы и зачистку забоя в последней фазе погрузки с возможностью автономного вертикального перемещения относительно проходческого полка, временно раскрепленного в стволе, и возможностью применения без дополнительных монтажно-демонтажных работ в вертикальных стволах разного диаметра в определенном диапазоне без замены типоразмера радиальной рамы.
Согласно изобретению поставленные задачи достигаются тем, что стволовая погрузочная машина с центральной подвеской, включающая радиальную раму коробчатой конструкции, на противоположных концах которой смонтированы самоходная каретка кругового перемещения по кольцевому монорельсу и шарнир для закрепления на центральной оси; рукоять со смонтированным на ее нижнем конце шарнирно управляемым грейфером и снабженного двумя управляющими домкратами, отличается тем, что радиальная рама коробчатого сечения выполнена телескопически раздвижной и состоит из средней основной и двух концевых телескопически выдвижных частей, расположенных с двух сторон основной части. Внутри телескопически выдвижных частей смонтированы гидродомкраты раздвижки с возможностью максимальной раздвижки. Основная часть выполнена в виде перевернутой буквы Т, на полках которой размещена самоходная тележка. К самоходной тележке шарнирно прикреплена рукоять с возможностью ограниченного поворота в радиальном направлении при помощи двух управляющих гидродомкратов, расположенных в этой же плоскости с двух сторон рукояти. Рукоять выполнена телескопически раздвижной и состоит из основной и телескопически выдвижной частей. Телескопическая раздвижка рукояти осуществляется посредством гидродомкрата, размещенного внутри телескопически выдвижной части. На нижнем конце телескопически выдвижной части шарнирно смонтирован управляемый при помощи двух гидродомкратов грейфер с возможностью кругового поворота относительно оси подвески за счет размещения управляющих гидродомкратов под пространственными углами друг к другу. Самоходная каретка кругового перемещения стволовой погрузочной машины располагается на кольцевом монорельсе, смонтированном на верхней части подвесной призабойной опалубки, а автономное перемещение по вертикали стволовой погрузочной машины отдельно от проходческого полка осуществляется посредством малогабаритной двухбарабанной лебедки, смонтированной на внешней стороне верхнего этажа проходческого полка, и центральной подвижной оси, на которой размещен шарнир радиальной телескопически раздвижной рамы, а центральная ось имеет возможность возвратно-поступательного движения в вертикальном направлении внутри центральной опоры проходческого полка, выполненной пустотелой.
Существенными отличиями являются:
1. Стволовая погрузочная машина с центральной подвеской, включающая коробчатой конструкции радиальную раму, на противоположных концах которой смонтированы самоходная каретка кругового перемещения по кольцевому монорельсу и шарнир для закрепления на центральной оси, отличается тем, что радиальная рама выполнена телескопически раздвижной. Она состоит из основной средней и двух телескопически выдвижных частей, расположенных с двух сторон основной части. При этом телескопическая раздвижка осуществляется гидродомкратами, размещенными внутри телескопически выдвижных частей с возможностью максимальной раздвижки.
Радиальная телескопически раздвижная рама при вдвинутых телескопически выдвижных частях используется при проходке вертикальных стволов наименьшего диаметра в отведенном диапазоне. Максимальный диаметр ствола для определенного типоразмера радиальной телескопически раздвижной рамы достигается при полностью выдвинутой одной из двух телескопически выдвижных частей.
Перевернутая Т-образная конструкция основной части позволяет осуществить монтаж на ней самоходной тележки.
2. Смонтированная шарнирно на самоходной тележке телескопически раздвижная рукоять со смонтированным шарнирно на нижнем конце телескопически выдвижной части управляемым грейфером создает необходимые напорные усилия на грейфер при зачерпывании и обеспечивает большой диапазон раздвижки за счет размещения гидродомкрата внутри телескопически выдвижной части, а верхние управляющие гидродомкраты рукояти позволяют осуществлять ограниченные угловые повороты в плоскости радиальной рамы.
3. Грейфер, управляемый посредством двух гидродомкратов может осуществлять выбор наиболее рационального места зачерпывания горной массы, обладая возможностью кругового поворота.
4. Двухбарабанная малогабаритная лебедка, установленная на внешней стороне верхнего этажа полка, и центральная подвижная ось для шарнирной подвески к ней радиальной телескопически раздвижной рамы позволяют осуществлять вертикальные перемещения стволовой погрузочной машины относительно проходческого полка совместно с призабойной опалубкой, опускающейся вслед отвала горной массы, а также подниматься к проходческому полку перед взрывными работами.
Сущность изобретения поясняется чертежами.
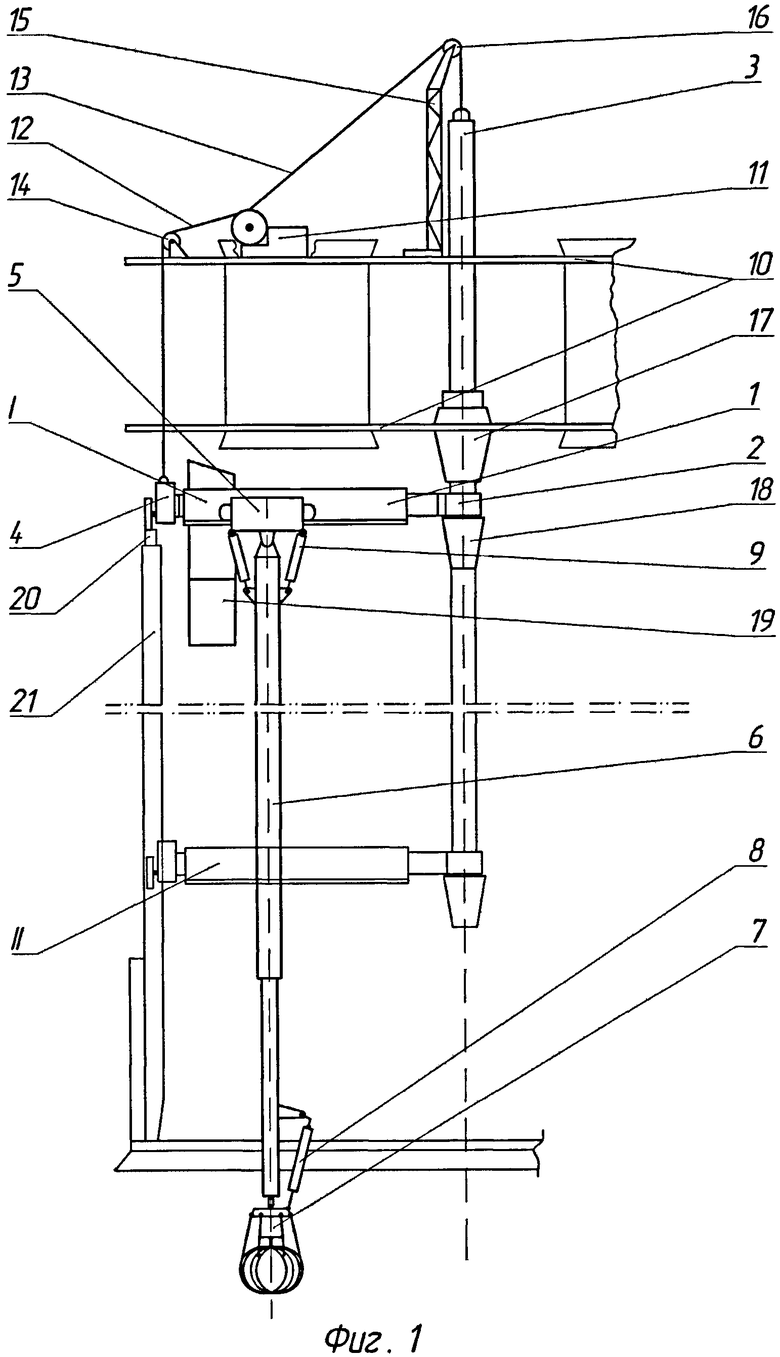
Фиг.1 - общая конструктивная схема стволовой погрузочной машины с центральной подвеской в связке с проходческим полком и подвесной призабойной опалубкой.
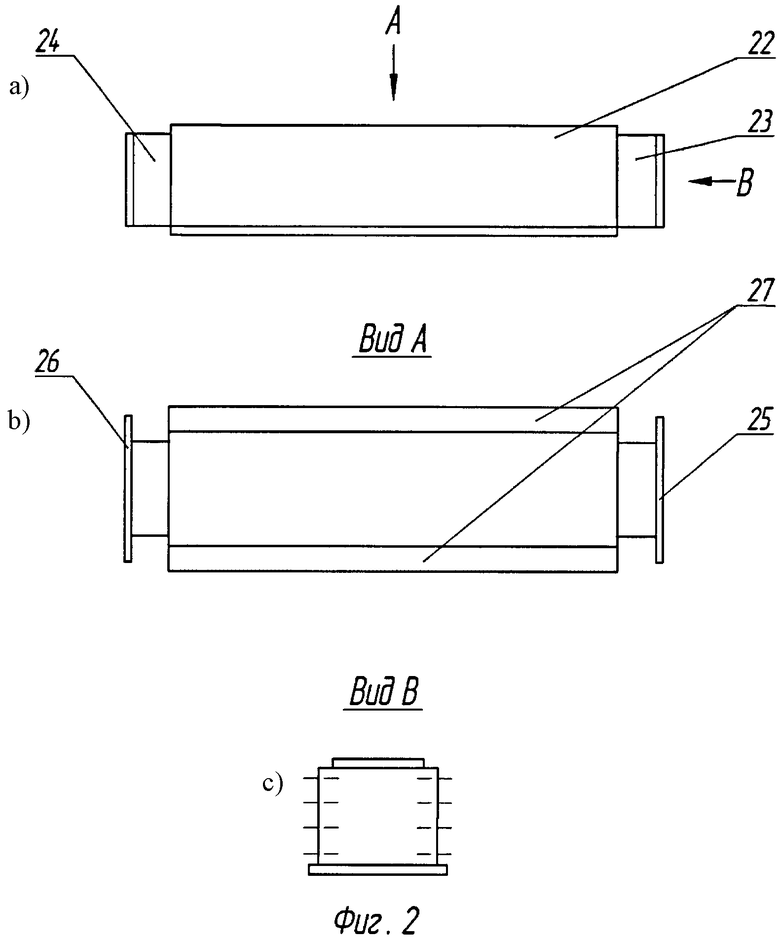
Фиг.2 - общий вид радиальной телескопически раздвижной рамы.
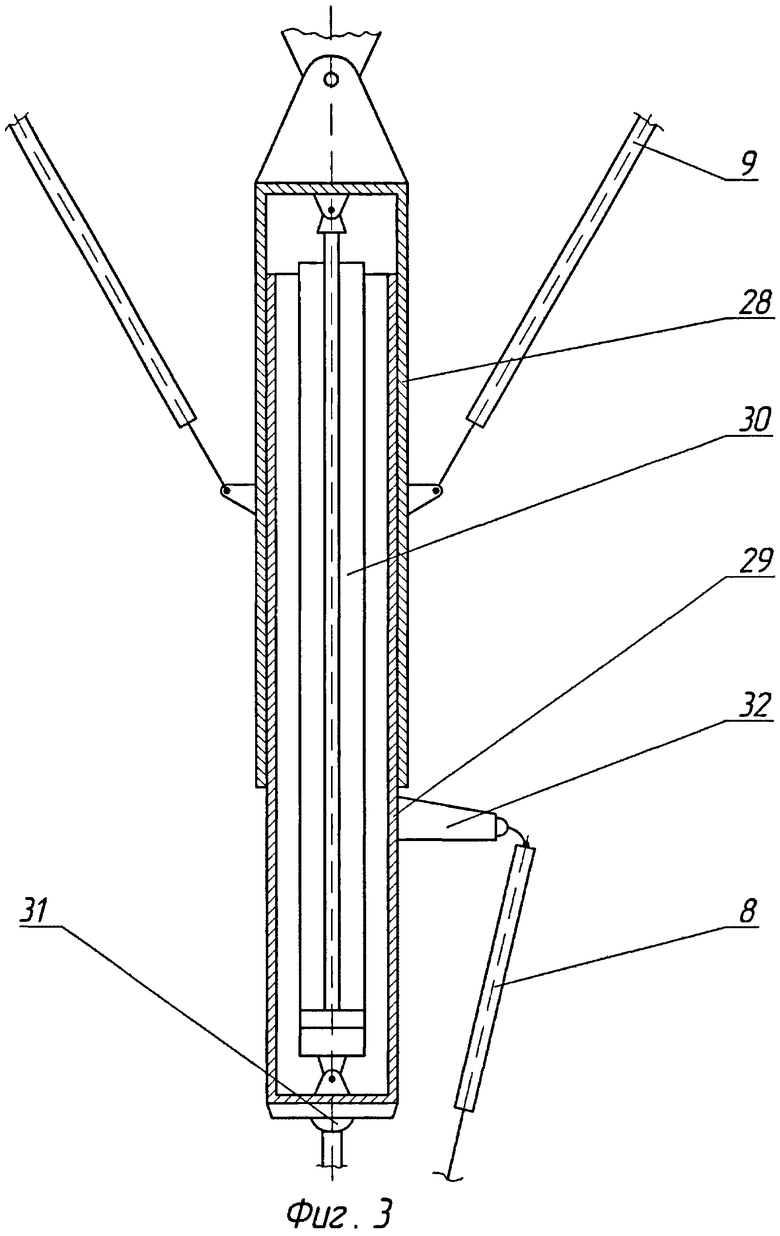
Фиг.3 - гидрокинематическая конструктивная схема телескопически раздвижной рукояти.
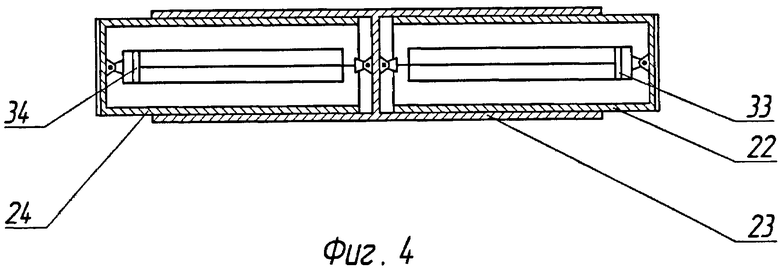
Фиг.4 - гидрокинематическая конструктивная схема телескопически раздвижной рамы.
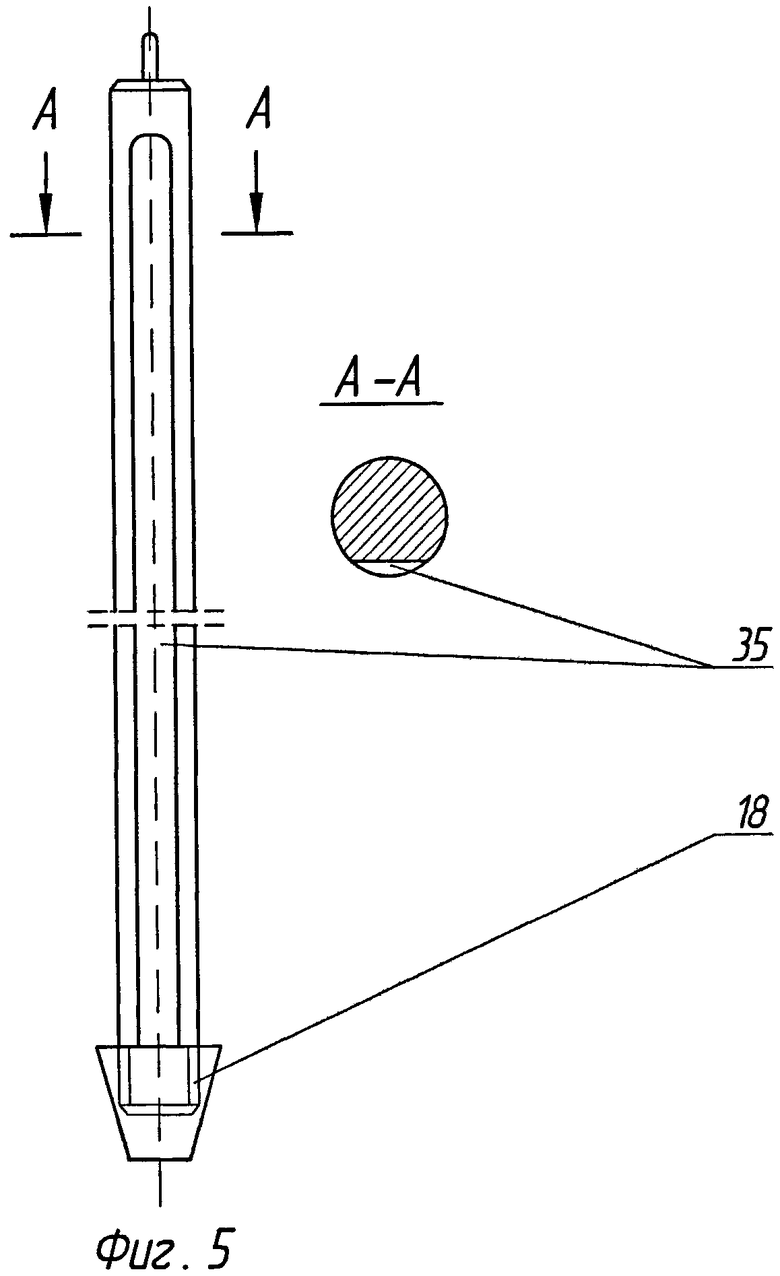
Фиг.5 - общий вид конструкции подвижной центральной оси.
На фиг.1 представлена общая конструктивная схема стволовой погрузочной машины с центральной подвеской в связке с проходческим полком и подвесной призабойной опалубкой. Она состоит из радиальной телескопически раздвижной рамы 1, которая внутренней стороной присоединена к шарниру 2 на подвижной центральной оси 3, а наружной - к самоходной каретке кругового перемещения 4. По средней части радиальной телескопически раздвижной рамы перемещается самоходная тележка 5, к которой шарнирно присоединена телескопически раздвижная рукоять 6. На нижнем конце рукояти 6 шарнирно смонтирован управляемый грейфер 7 с двумя разнесенными под пространственным углом управляющими гидродомкратами 8. Телескопически раздвижная рукоять 6 при помощи двух гидродомкратов 9 имеет возможность ограниченного углового поворота в плоскости радиальной телескопически раздвижной рамы 1.
На внешней стороне верхнего этажа проходческого полка 10 смонтирована малогабаритная двухбарабанная лебедка 11. Лебедка 11 служит для автономного перемещения стволовой погрузочной машины по вертикали (опускание и подъем) отдельно от проходческого полка 10. Двухбарабанная лебедка 11 посредством своих канатов 12 и 13 через блок 14 периодически соединяется с самоходной кареткой кругового перемещения 4, а через стойку 15 и блок 16 постоянно связана с центральной подвижной осью 3.
Подвижная ось 3 проходит через пустотелую центральную опору 17 проходческого полка 10, в нижней части заканчивается упором 18, служащим ограничителем (предохранителем) для шарнира 2 радиальной телескопически раздвижной рамы 1 с подвижной осью 3. На основной части радиальной телескопически раздвижной рамы 1 смонтирована кабина машиниста 19.
Самоходная каретка кругового перемещения 4 передвигается по кольцевому монорельсу 20, смонтированному в верхней части подвесной опалубки 21.
На фиг.2 представлена общая конструктивная схема радиальной телескопически раздвижной рамы 1. Она состоит из основной части 22 и двух противоположных телескопически выдвижных частей 23 и 24. На наружных концах последних находятся фланцы 25 и 26, служащие для монтажа к ним самоходной каретки кругового перемещения 4 и шарнира 2 (фиг.1). На основной части 22, выполненной в виде перевернутой Т-образной конструкции, по бокам располагаются полки 27 для перемещения по ним самоходной тележки 5.
На фиг.3 представлена конструктивная гидрокинематическая схема телескопически раздвижной рукояти 6. Рукоять 6 состоит из основной 28 и телескопически выдвижной 29 частей, связанных между собой гидродомкратом телескопической раздвижки 30. Раздвижной гидродомкрат 30 размещен внутри телескопической части 29, что обеспечивает максимальную телескопическую раздвижность. Грейфер 7 (фиг.1) соединяется с телескопически выдвижной частью 29 посредством шарового или двойного (карданного) шарнира 31. Такого же типа сочленение используется для присоединения управляющих гидродомкратов 8 со стойками 32, жестко смонтированными на телескопически выдвижной части 29 рукояти 6.
На фиг.4 представлена конструктивная гидрокинематическая схема радиальной телескопически раздвижной рамы 1. Она состоит из средней основной части 22 и двух телескопически выдвижных частей 23 и 24 с противоположным направлением выдвижения. Телескопическая раздвижки радиальной рамы осуществляется при помощи двух противоположно действующих гидродомкратов 33 и 34, размещенных внутри своих телескопически выдвижных частей.
На фиг.5 представлен общий вид подвижной центральной оси 3, на которой имеется продольный шлиц 35. В пустотелой центральной опоре 17 внутри имеется соответствующей формы выступ (короткий шлиц), который препятствует проворачиванию оси при ее продольном перемещении. На верхней части жестко смонтирована проушина 36 для соединения с канатом 13.
Принцип работы стволовой погрузочной машины с центральной подвеской
1. Проведение вертикального ствола наименьшего диаметра для данного типоразмера радиальной телескопически раздвижной рамы 1. Стволовая погрузочная машина осуществляет выгрузку горной массы со вдвинутыми полностью внутрь телескопически выдвижными частями 23 и 24.
2. Проведение ствола большего диаметра (обычно диаметры стволов изменяются на 0,5 м), радиальная телескопически раздвижная рама 1 вначале размещается в стволе со втянутой полностью внутрь телескопической частью 23, сопряженной с подвижной центральной осью 3 шарниром 2, а вторая телескопически выдвижная часть 24 выдвигается и, связанная с ней самоходная каретка кругового перемещения 4 своими катками устанавливается на кольцевой монорельс 20 подвесной призабойной опалубки 21 (фиг.1).
По мере выгрузки горной массы в центральной зоне ствола средняя основная часть 22 радиальной телескопически раздвижной рамы 1 перемещается в сторону самоходной каретки 4 за счет разнонаправленного движения гидродомкратов телескопической раздвижки 23 и 24 (фиг.4). После передвижки основной части 22 выгрузка горной массы осуществляется в периферийной зоне ствола.
3. После выгрузки (уборки) горной массы по всему сечению ствола на глубину, равную величине телескопической раздвижки рукояти 6, стволовая погрузочная машина центральной подвеской перемещается в такое положение, когда радиальная телескопически раздвижная рама 1 своей самоходной кареткой кругового перемещения 4 займет место под прицепным устройством каната 12 (положение I). Производится одновременное опускание призабойной опалубки 21 посредством своих проходческих лебедок, установленных на поверхности, и малогабаритной двухбарабанной лебедки 11 (фиг.1). По окончании выполнения этих операций канат 12 отсоединяется от самоходной каретки кругового перемещения 4 (положение II), а процесс выгрузки горной массы возобновляется.
Перед взрывными работами стволовая погрузочная машина с центральной подвеской занимает определенное место и, после соединения с канатом 12, поднимается к полку 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2455489C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2460884C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА С РЫЧАЖНЫМ РАБОЧИМ ОБОРУДОВАНИЕМ | 2008 |
|
RU2377408C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2380542C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2362878C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2007 |
|
RU2370651C2 |
| РАБОЧИЙ ОРГАН СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ | 2007 |
|
RU2361086C2 |
Изобретение относится к горному делу, а именно к стволовым погрузочным машинам. Технический результат - увеличение темпов проходки вертикальных стволов, повышение эффективности выгрузки горной массы. Стволовая погрузочная машина состоит из радиальной телескопически раздвижной рамы коробчатой конструкции, состоящей из средней основной части перевернутой Т-образной конструкции и двух телескопически выдвижных боковых частей с размещенными внутри гидродомкратами раздвижки. На полках средней основной части размещена самоходная тележка, к которой шарнирно прикреплена телескопически раздвижная рукоять с возможностью ограниченного углового поворота посредством двух управляющих гидродомкратов, связанных шарнирно с самоходной тележкой и с телескопически раздвижной рукоятью. Рукоять состоит из основной и телескопически выдвижной частей и связанных между собой гидродомкратом раздвижки, размещенным внутри телескопически выдвижной части. На нижнем конце телескопически выдвижной части шарнирно смонтирован управляемый грейфер с возможностью кругового поворота. Самоходная каретка кругового перемещения располагается на кольцевом монорельсе, смонтированном на верхней части подвесной призабойной опалубки. Автономное перемещение машины по вертикали отдельно от проходческого полка осуществляется при помощи двухбарабанной малогабаритной лебедки, смонтированной на внешней стороне верхнего этажа проходческого полка, и центральной подвижной оси. 5 ил.
Стволовая погрузочная машина с центральной подвеской, включающая радиальную раму, на противоположных концах которой смонтированы самоходная каретка кругового перемещения по кольцевому монорельсу и шарнир для закрепления на центральной оси; рукоять и шарнирно смонтированный на ее нижнем конце грейфер, отличающаяся тем, что радиальная рама коробчатого сечения выполнена телескопически раздвижной и состоит из средней основной части перевернутой Т-образной конструкции и двух телескопически выдвижных боковых частей с размещенными внутри гидродомкратами раздвижки, и на полках средней основной части размещена самоходная тележка, к которой шарнирно прикреплена рукоять с возможностью ограниченного углового поворота в радиальном направлении посредством двух управляющих гидродомкратов, а сама рукоять выполнена телескопически раздвижной и состоит из основной и телескопически выдвижной частей, при этом телескопическая раздвижка осуществляется посредством гидродомкрата, размещенного внутри телескопически выдвижной части, а на нижнем конце последней шарнирно смонтирован управляемый при помощи двух пространственно разнесенных гидродомкратов грейфер с возможностью кругового поворота относительно оси подвески, при этом самоходная каретка кругового перемещения располагается на кольцевом монорельсе, смонтированном на верхней части подвесной призабойной опалубки, а автономное перемещение стволовой погрузочной машины по вертикали отдельно от проходческого полка осуществляется при помощи двухбарабанной малогабаритной лебедки, смонтированной на внешней стороне верхнего этажа проходческого полка, и центральной подвижной оси, на которой размещен шарнир радиальной телескопически раздвижной рамы, а центральная подвижная ось при этом имеет возможность возвратно-поступательного движения в вертикальном направлении внутри центральной опоры проходческого полка, выполненной пустотелой.
| МАЛЕВИЧ Н.А | |||
| Машины и комплексы оборудования для проходки вертикальных стволов | |||
| - М.: Недра, 1975, с.59-72 | |||
| ПАТСНТИО «А'" | 0 |
|
SU181026A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 0 |
|
SU194720A1 |
| Устройство для погрузки породы в забое ствола | 1974 |
|
SU494523A1 |
| Стволовое породопогрузочное устройство | 1980 |
|
SU881329A1 |
| Грейферная породопогрузочная машина | 1982 |
|
SU1020586A1 |
| Стволовое породопогрузочное устройство | 1984 |
|
SU1167335A1 |

