Изобретение относится к электропневматике и касается управления приводом, в частности струйным, запорно-регулирующей арматуры магистральных трубопроводов.
Известны электропневматические устройства управления приводом запорно-регулирующей арматуры (RU 2126497, кл. F 15 B 9/03, 1999 г.; RU 2217626, кл. F 15 B 9/03, 2003 г.; RU №2131065, кл. F 15 В 9/03, 1999 г.), содержащие электромагниты и герконы во взрывозащитной оболочке, пневмоклапаны, осуществляющие подачу рабочего газа в привод, и магниты, расположенные на концах поворотных рычагов с возможностью взаимодействия с герконами. В устройствах предусмотрена возможность как дистанционного, так и ручного управления пневмоклапанами, а также механическое устройство ограничения кинетической энергии привода при подходе запорного органа управляемой приводом арматуры к крайним положениям с целью защиты элементов привода и исполнительных механизмов объекта управления от разрушения. К недостаткам этих устройств относится малые быстродействие и надежность схем ограничения кинетической энергии.
Наиболее близким к заявляемому по числу совпадающих признаков является управляющее устройство по патенту RU №2087752, кл. F 15 В 9/03, 1997 г., содержащее управляющие и управляемые клапаны, электромагниты, герконы, постоянные магниты, а также электронную схему ограничения кинетической энергии привода, включающую датчики и измерители положения рабочего органа и скорости его движения, программно-логический блок и блок вычисления, выполненный с возможностью формирования сигнала переключения электромагнитов. Схема отличается наличием большого количества логических элементов и связей, напрямую определяющих ее надежность в процессе эксплуатации. При заранее известных параметрах объекта управления задача может быть решена более простым способом. Кроме того, в вышеупомянутом устройстве не предусматривается защита элементов привода и рабочего органа объекта регулирования от повреждения в случае использования устройства управления с нарушением инструкции по эксплуатации.
Задачей изобретения является повышение надежности управляющего устройства за счет введения схемы ограничения кинетической энергии привода с наперед заданной длительностью импульса управления переключением электромагнитов, а также формирования сигнала блокировки электромагнита при подаче несанкционированных команд на управляющее устройство.
Сущность изобретения заключается в том, что в электропневматическом управляющем устройстве, содержащем фильтр-осушитель, управляющие и пневмоуправляемые клапаны, регуляторы давления, установленные на поворотном устройстве постоянные магниты, размещенные во взрывозащищенной камере первый и второй электромагниты и первый и второй герконы, а также электронную схему ограничения кинетической энергии привода, последняя включает третий и четвертый герконы, установленные с возможностью взаимодействия с постоянными магнитами, а также первый и второй формирователи импульсов. Один из входов первого формирователя импульсов соединен с первым контактом первого геркона, другой вход - с первым контактом третьего геркона, а выход - с третьим контактом второго геркона. Один из входов второго формирователя импульсов соединен с первым контактом второго геркона, другой вход - с первым контактом четвертого геркона, а выход - с третьим контактом первого геркона. Выход каждого из формирователей импульсов соединен с третьим контактом соответствующего геркона через усилитель. Каждый из формирователей выполнен с возможностью регулировки длительности импульса. Кроме того, каждый из формирователей соединен с первым контактом соответствующего геркона через схему гальванической развязки. Фильтр-осушитель дополнительно снабжен фильтром механических примесей. Помимо этого, в устройство для управляющих клапанов введен последовательно с фильтром-осушителем введен штуцер-фильтр механических примесей, подающий очищенный рабочий газ на управляющие и пневмоуправляемые клапаны.
Предлагаемое построение электронной схемы ограничения кинетической энергии привода с формированием импульса управления переключением электромагнитов наперед заданной длительности, определяемой типом объекта регулирования и устанавливаемой в процессе настройки устройства, так же, как и в прототипе, позволяет осуществить "противовключение" привода, то есть изменить направление вращения ротора привода и, соответственно, запорного органа объекта регулирования, притормаживая последний при подходе его к крайним положениям. Одновременно в предлагаемой схеме формируется команда на блокировку электромагнита, отвечающего за поворот ротора привода в направлении отработки ранее поданной команды. Введение в заявляемое устройство дополнительного фильтра механических примесей, а также в фильтр-осушитель - дополнительного элемента фильтрации механических примесей повышает надежность устройства в процессе эксплуатации.
Изобретение поясняется описанием и приложенными к нему чертежами. На фиг.1 представлена электропневматическая схема устройства управления, на фиг.2 - вариант выполнения электронной схемы ограничения кинетической энергии привода, на фиг.3 - разрез штуцер-фильтра, на фиг.4 - разрез фильтра-осушителя
Электропневматическое управляющее устройство содержит входной фильтр механических примесей (штуцер) 1, фильтр-осушитель 2, управляющие клапаны 3 и 4, пневмоуправляющие клапаны 5 и 6, регуляторы давления 7 и 8, основные первый 9 и второй 10 герконы, электрически связанные с электромагнитами 11 и 12, толкатели которых через дублирующие рычаги (на схеме не показаны) связаны с толкателями управляющих клапанов 3 и 4 соответственно, постоянные магниты 13 и 14, установленные на поворотном устройстве 15 с возможностью взаимодействия с герконами. В непосредственной близости от герконов 9 и 10 установлены дополнительно третий 16 и четвертый 17 герконы. Обе пары герконов и электромагниты размещены во взрывозащищенной камере 18, в которой размещена также электронная схема ограничения кинетической энергии привода, включающая первый 19 и второй 20 формирователи импульсов. Один из входов первого формирователя 19 соединен с первым контактом первого геркона 9, другой вход - с первым контактом третьего геркона 16, а выход - с третьим контактом второго геркона 10. Один из входов второго формирователя 20 соединен с первым контактом второго геркона 10, другой вход - с первым контактом четвертого геркона 17, а выход - с третьим контактом первого геркона 9. Выход формирователя 19 соединен с третьим контактом геркона 10 через усилитель 21, а выход формирователя 20 с третьим контактом геркона 9 - через усилитель 22. Каждый из фомирователей выполнен с возможностью регулирования длительности импульса. Формирователь 19 соединен с первым контактом геркона 16, а формирователь 20 - с первым контактом геркона 17 через схемы гальванической развязки 23 и 24 соответственно, позволяющие разделить командные цепи и цепи контроля состояния объекта регулирования.
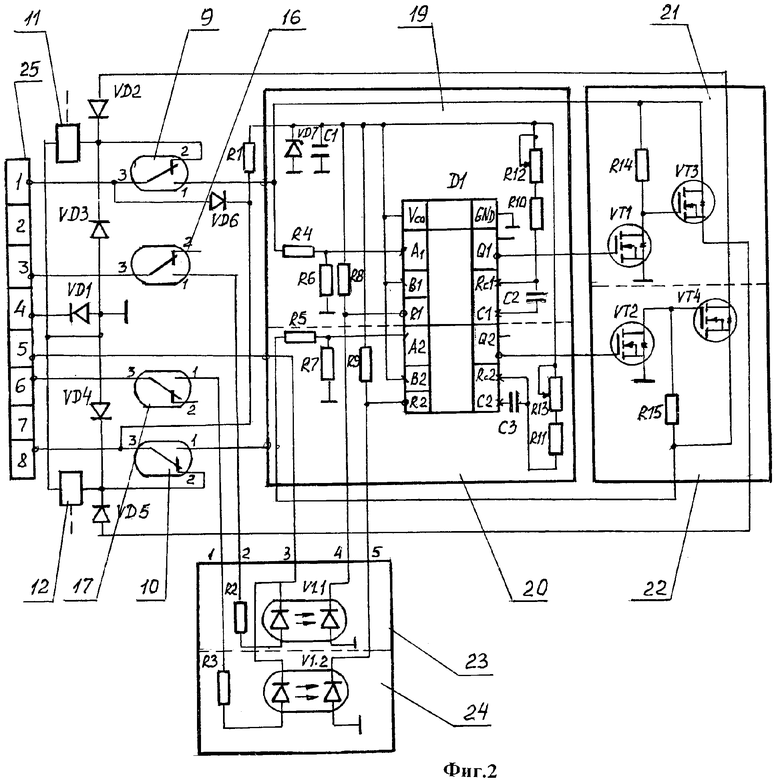
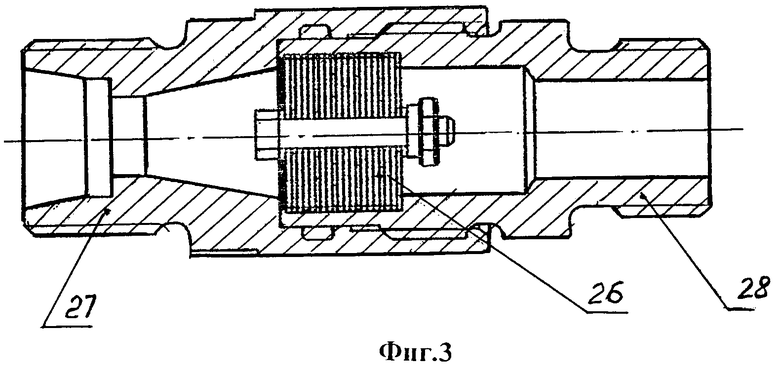
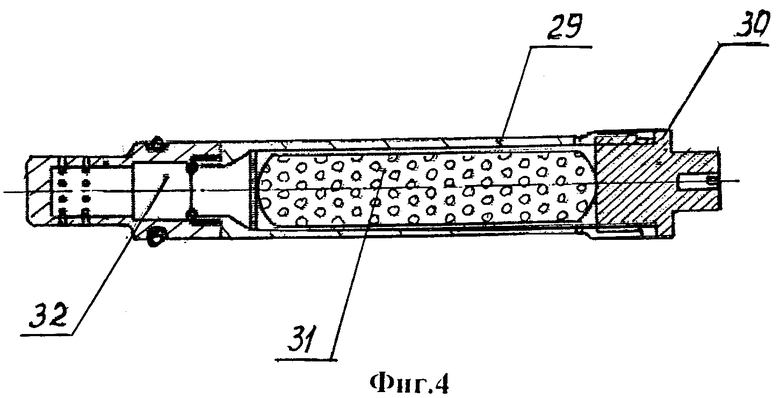
В варианте электронной схемы ограничения кинетической энергии привода, приведенной на фиг.2, формирователи импульсов 19 и 20 выполнены в виде одновибратора (микросхема D1), усилители импульсов 21 и 22 - на двух полевых транзисторах каждый (VT1, VT3 и VT2, VT4 соответственно), а схемы гальванической развязки 23 и 24 - на оптопаре V1 (V1.1 и V1.2 соответственно). Каждый из формирователей импульсов снабжен цепью регулирования длительности импульса (R10, R12, С2 и R11, R13, C3). Резисторы R1..R9, R14, R15, диоды VD1..VD7 и конденсатор С1, включенные в схему, служат для обеспечения необходимого уровня напряжений питания, фильтрации его и развязки цепей основных и дополнительных герконов. Подача сигналов управления и питание схемы осуществляется через распределительную колодку 25. Штуцер-фильтр 1 представляет собой фильтрующий элемент 26 в виде набора сеток, стянутых шпилькой и зажатых в штуцере 27 гайкой 28. Фильтр-осушитель 2 содержит корпус 29 с крышкой 30, в котором размещен осушитель в оболочке 31 и вставка 32, фильтрующая механические примеси.
Устройство управления приводом работает следующим образом. При подаче сигнала на открытие объекта регулирования (например, шарового крана) путем подачи положительного напряжения на соответствующий контакт распределительной колодки 25 нормально замкнутые второй и третий контакты геркона 9 поступает на обмотку питания электромагнита 11. Электромагнит 11, срабатывая, воздействует на управляющий клапан 3 и рабочий газ через входной фильтр механических примесей 1 и фильтр-осушитель 2 поступает на управляющий клапан 3, далее на пневмоуправляемый клапан 5, открывая его. При этом газ поступает в регулятор давления газа 7 и редуцированный газ - на выход устройства, связанный с приводом. Приведенный в движение вал привода воздействует на соединенный с ним запорный орган регулируемого объекта (например, шарового крана), приводя последний в открытое состояние. При достижении объектом регулирования конечного состояния постоянный магнит 13, установленный на поворотном устройстве 15, связанном с валом привода, воздействует на геркон 9, который размыкает цепь питания электромагнита, клапаны закрываются, а первый и третий контакты геркона 9 замыкают цепь первого входа формирователя 19. Сформированный при этом импульс, длительность которого определяется времязадающей цепочкой, усиленный усилителем 21 до необходимой величины, поступает в цепь питания другого электромагнита 12 (отвечающего за закрытие объекта регулирования), открываются клапаны 4 и 6, задействован регулятор давления газа 8. Редуцированный газ поступает на привод и на запорный орган объекта, закрывая его. Воздействие осуществляется в течение длительности импульса "противовключения", притормаживая привод и гася большую часть его кинетической энергии. Почти одновременно (временной сдвиг определяется точностью установки основного и дополнительного герконов) замыкаются первый и третий контакты геркона 16 и через второй и третий контакты схемы гальванической развязки 23 замыкается цепь индикации состояния крана "открыт" и одновременно четвертый контакт упомянутой схемы другой вход формирователя 19 соединяется с "нулем" источника питания, блокируя формирователь импульсов при подаче повторной команды на открытие объекта. Аналогичным образом устройство работает и при подаче сигнала на открытие объекта регулирования.
Электропневматическое управляющее устройство может быть использовано для управления приводом, преимущественно, струйным, запорно-регулирующей арматуры для магистральных трубопроводов, транспортирующих рабочую среду, например газ или жидкость.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2006 |
|
RU2327904C2 |
| Учебно-испытательная установка по настройке схемы управления краном магистрального газопровода с системой автоматического управления | 2023 |
|
RU2830931C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2171406C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2006 |
|
RU2330192C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2178842C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2126497C1 |
| БЛОК ПРЕДОХРАНИТЕЛЬНЫХ КЛАПАНОВ | 2014 |
|
RU2586794C2 |
| Автоматизированная система полива | 1984 |
|
SU1250217A1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ КРАНОМ НА ГАЗОКОНДЕНСАТОПРОВОДЕ | 2019 |
|
RU2718101C1 |
Устройство предназначено для управления приводом, в частности струйным, запорно-регулирующей арматуры магистральных трубопроводов. Устройство содержит фильтр-осушитель, управляющие и пневмоуправляемые клапаны, регуляторы давления, установленные на поворотном устройстве постоянные магниты, взрывозащищенную камеру с размещенными в ней электромагнитами и первым и вторым герконами, а также электронную схему ограничения кинетической энергии привода. Упомянутая схема включает третий и четвертый герконы, установленные с возможностью взаимодействия с постоянными магнитами, а также первый и второй формирователи импульсов, причем один из входов первого формирователя соединен с первым контактом первого геркона, другой вход - с первым контактом третьего геркона, а выход - с третьим контактом второго геркона, а один из входов второго формирователя соединен с первым контактом второго геркона, другой вход - с первым контактом четвертого геркона, а выход - с третьим контактом первого геркона. Технический результат - повышение надежности. 5 з.п. ф-лы, 4 ил.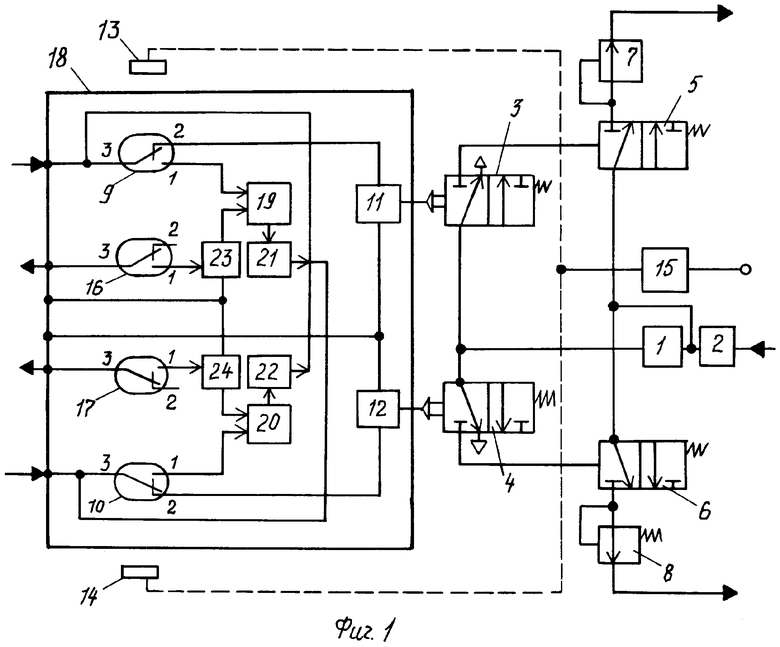
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗОНЕФТЕПРОВОДОВ, СТРУЙНЫЙ ДВИГАТЕЛЬ, МЕХАНИЧЕСКАЯ ЗУБЧАТАЯ ПЕРЕДАЧА, КУЛИСНО-ВИНТОВОЙ ПОВОРОТНЫЙ МЕХАНИЗМ, УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ (ВАРИАНТЫ) | 2003 |
|
RU2217626C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| DE 3142583 А1, 15.05.1983 | |||
| US 4437386 А, 20.03.1984. | |||

