Изобретение относится к авиационной технике, а именно комплексной обучающей системе, предназначенной для совместной профессиональной подготовки авиационных специалистов, принимающих участие в выполнении, организации и управлении полетами: летного состава и взаимодействующих с ним в процессе выполнения полетов наземных служб.
Известен унифицированный многофункциональный авиационный тренажер, содержащий локальную компьютерную сеть, унифицированное рабочее место (РМ) инструктора, комплекс унифицированных РМ обучаемых в летной группе инструктора, экран коллективного пользования, устройство ввода полетной информации, базу данных сценариев тренировок, базу данных результатов тренировок. Локальная компьютерная сеть содержит программные модули реализации сценариев тренировок, объективного контроля обучаемого и объективного контроля инструктора /1/.
К недостаткам известного устройства относится то, что экран общего пользования не позволяет индивидуализировать процесс обучения и, следовательно, значительно ссужает круг решаемых задач.
Существующие базы сценариев тренировок не позволяют сделать обучение интерактивным, вносить в него изменения по ходу обучения в зависимости от принимаемых решений каждым обучающимся и их влияния на других обучающихся.
Кроме того, в известном тренажере номенклатура РМ не позволяет расширить круг решаемых задач по взаимодействию различных наземных служб и командного состава, занятого в обеспечении полетов.
РМ летчиков, содержащие дисплейные модули обучаемого и модули тренажа обучаемого не позволяют выработать навыки, необходимые для работы в реальном полете, и приводят к опасности воспитания «виртуальных специалистов».
Известна комплексная обучающая система для авиационных специалистов, содержащая от 2 до 8 летательных аппарата (ЛА), с оборудованными на них РМ, установленных на шаровых платформах динамических тренажеров, перемещающихся в двух-трех плоскостях, с персональными компьютерами, механической и электрической частями, диспетчерским пультом с РМ управляющей наземной службы и вычислительной локальной сетью с выводом картины в одном виртуальном поле событий на общий обзорный экран для всех РМ /2/ - прототип.
Известная система обеспечивает одновременную тренировку нескольких экипажей и диспетчерского состава управляющей наземной службы на индивидуальных тренажерах с оборудованными на них РМ, укомплектованными реальными приборами и оборудованием с дискретными и непрерывными органами управления, связанными контактными устройствами с локальной вычислительной сетью.
Недостатком известной обучающей системы является малая вероятность ее практического осуществления, например выполнение общего обзорного экрана для 2-8 вертолетов затруднено не только из-за его больших габаритов, но и требует специального оборудования для его затемнения в условиях дневных тренировок, что значительно повышает расходы не только по созданию комплекса, но и по его эксплуатации. Кроме того такие условия обучения мало отвечают условиям реальных полетов.
Вращение каждого вертолета, закрепленного на шаровой опоре, осуществляемое 6 лебедками, приведет к большей энергоемкости системы управления всеми РМ (2-8) обучаемых и потребует установки дополнительного оборудования для его осуществления. А закрепление вертолетов на платформе, расположенной по центру тяжести отцентрированного фюзеляжа каждого вертолета, из-за ограниченной длины троса не позволит осуществлять поворот вокруг каждой из осей на большие углы, что также не позволяет приблизить условия тренировки к реальным.
Таким образом, известное устройство комплексной обучающей системы трудноосуществимо, не достаточно эффективно, поскольку не позволяет максимально приблизить условия тренировок к реальным условиям полета. Для создания скоростей и ускорений, близких к реальным, необходимо создавать большие усилия, которые приведут к повышению и без того энергоемкого динамического тренажера и комплексной системы в целом и значительному удорожанию ее эксплуатации.
Кроме того, в известной обучающей системе ограничена номенклатура рабочих мест, например, не предусмотрены рабочие места для инспектора и других специалистов руководящего состава.
Задачей заявляемого изобретения является максимальное приближение обучения и взаимодействия специалистов летных экипажей и различных наземных служб, в том числе командного состава к реальным условиям полетных тренировок при максимальном удешевлении стоимости обучения и эксплуатации комплексной обучающей системы.
Поставленная задача достигается тем, что в известном устройстве, комплексной обучающей системы для авиационных специалистов, содержащей рабочие места (РМ) управляющей наземной службы, одно и более РМ обучаемых летчиков, оборудованных на индивидуальных тренажерах в реальных кабинах летательных аппаратов (ЛА), установленных на динамических платформах с возможностью перемещения в 2-3 плоскостях, оснащенных приборами контроля с дискретными органами управления, арматурой и органами управления непрерывного действия, связанными контактными устройствами с вычислительной локальной сетью в одном виртуальном поле событий и выводом информации на устройства визуализации, контактные устройства органов управления непрерывного действия выполнены в виде датчиков, каждый из которых последовательно связан с контроллерной системой, а комплексная обучающая система дополнительно снабжена вычислительным комплексом, содержащим РМ оператора с индивидуальным устройством визуализации, оборудованным центральным сервером с устройствами ввода-вывода информации и запоминающим устройством, включающим массив баз исходных данных, блок моделирования реальных процессов с устройствами моделирования и блок объективного контроля обучаемых, управляющим обменом информацией между локальными сетями, связывающими вычислительный комплекс с РМ обучаемых посредством параллельной связи центрального сервера с функционально-ориентированными серверами локальных сетей РМ обучаемых летчиков, РМ управляющей наземной службы, например РМ руководителя полетов, РМ руководителя зоны посадки, РМ группы наземного управления и РМ инструктора, а также локальной сетью РМ инспектора, при этом локальные сети включают последовательно соединенные с серверами вычислительные модули реализации сценариев тренировок и устройства визуализации, выполненные в виде индивидуальных экранов или системы мониторов, а обмен информации в локальных сетях и между функционально ориентированными серверами осуществляется через центральный сервер.
Каждый сервер локальной сети РМ летчиков, содержащий блок моделирования и управления динамической модели ЛА, блок управления динамической платформой, блок управления радиосвязью, параллельно соединен устройством ввода-вывода информации с вычислительными модулями бортовой системы визуализации закабинного пространства, вычислительным модулем системы отображения приборов, управления арматурой кабины и имитаторами шумов двигателей и вычислительным модулем системы управления вооружением, при этом дискретные органы управления установлены на приборных щитках, часть которых выполнена в виде экрана с отверстиями по периметру приборов и индикаторов, расположенного перед одним или несколькими мониторами системы отображения приборов и управления арматурой кабины.
Сервер инструктора, содержащий блок моделирования и управления динамической модели ЛА и блок управления радиосвязью, установлен с возможностью параллельного соединения с одним из серверов РМ летчиков и с вычислительными модулями системы бортовой визуализации закабинного пространства, вычислительным модулем отображения приборов, управления арматурой кабины и имитации шумов двигателей, вычислительным модулем системы управления вооружением, при этом рабочее место инструктора оборудовано на индивидуальном тренажере в реальной кабине ЛА, а органы управления дополнительно содержат пульт ввода учебных отказов.
Сервер управляющей наземной службы, содержащий блок управления радиосвязью и блок управления светотехническим оборудованием аэродрома, параллельно соединен с вычислительными модулями радиотехнической системы ближней навигации, системы управления группы наземного управления, радиотехнической системы посадки и контроля метеообстановки.
РМ руководителя полетов оборудовано на индивидуальном тренажере индикатором дальнего радиолокатора, индикатором радиотехнической системы ближней навигации, системой командной радиосвязи, системой управления светотехническим оборудованием аэродрома.
РМ руководителя зоны посадки смонтировано на индивидуальном тренажере и оснащено индикаторами радиолокационной системы посадки, системой командной радиосвязи, системой управления светотехническим оборудованием аэродрома, системой отображение информации метеообстановки.
РМ группы наземного управления выполнено в виде тренажера, оборудованного индикаторами дальнего радиолокатора и средствами командной радиосвязи.
Центральный сервер последовательно соединен с системой визуализации и печатающим устройством класса разбора полетов и анализа средств объективного контроля.
Наличие в заявляемом изобретении указанных существенных признаков, прежде всего взаимосвязь компьютерного вычислительного комплекса с рабочими местами специалистов летных экипажей и наземных служб, размещенными в реальных кабинах ЛА, оснащенных реальными органами управлекния позволяет:
- расширить число решаемых задач и повысить эффективность проведения тренировок за счет эффективной и качественной подготовки летного состава на всех этапах полета, приобретения развития и укрепления навыков ведения боевых действий как одиночно, так и в составе группы ЛА, отработки взаимодействия при ведении боевых действий между экипажами ЛА и группой наземного (боевого) управления;
- максимально приблизить условия обучения к реальным условиям, проводить интерактивные комплексные тренировки по ведению боевых действий в составе авиационных подразделений с последующим анализом каждого этапа проведения операций;
- расширить состав и количество обучаемых авиационных специалистов и задачи тренировок от узких и одиночных до сложных в составе всего комплекса;
- выработать навыки взаимодействия различных служб, в том числе приобретать, развивать и укреплять навыки управления боевыми действиями как одиночных ЛА, так и группы ЛА, взаимодействия между членами группы управления боевыми действиями;
- значительно удешевить обучение за счет снижения энергоемкости пилотажных динамических платформ, применения простых конструктивных решений имитаторов составляющих устройств предложенной системы, в том числе и взаимосвязи электромеханической и компьютерной частей обучающей системы.
Предложенное устройство поясняется чертежами.
Фиг.1 - принципиальная схема авиационной комплексной обучающей системы;
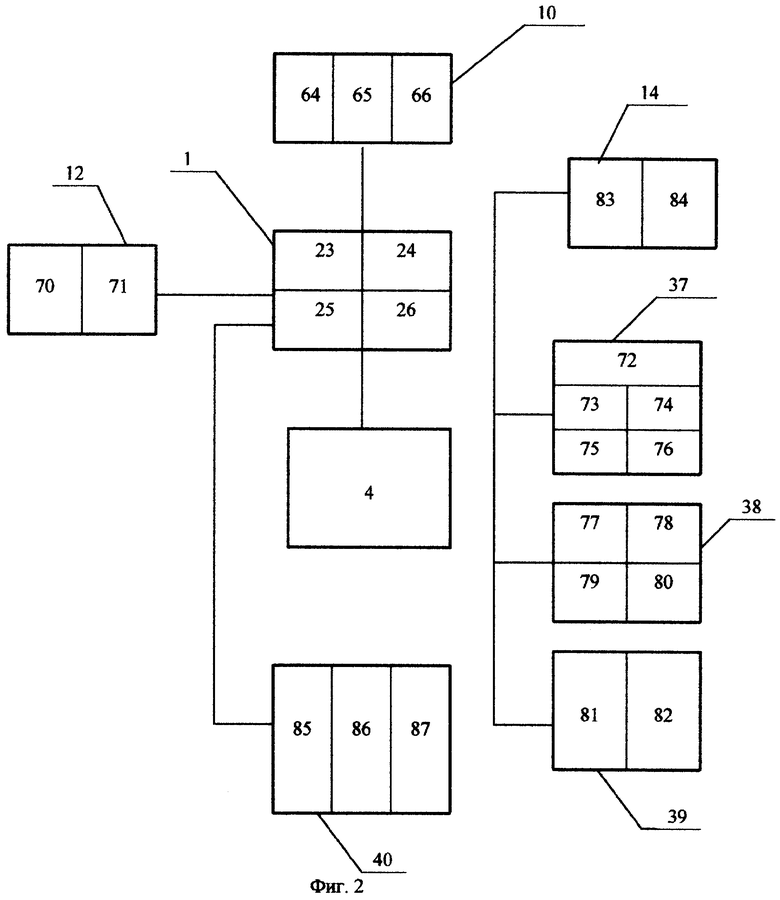
Фиг.2 - принципиальная схема соединения центрального сервера с функционально-ориентированными серверами;
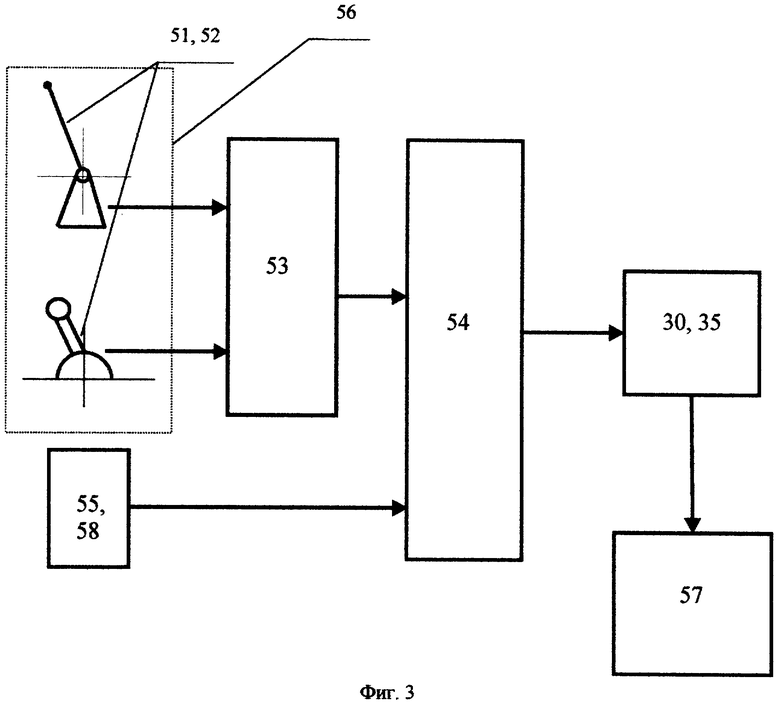
Фиг.3 - принципиальная схема регистрации положения органов управления непрерывного действия;
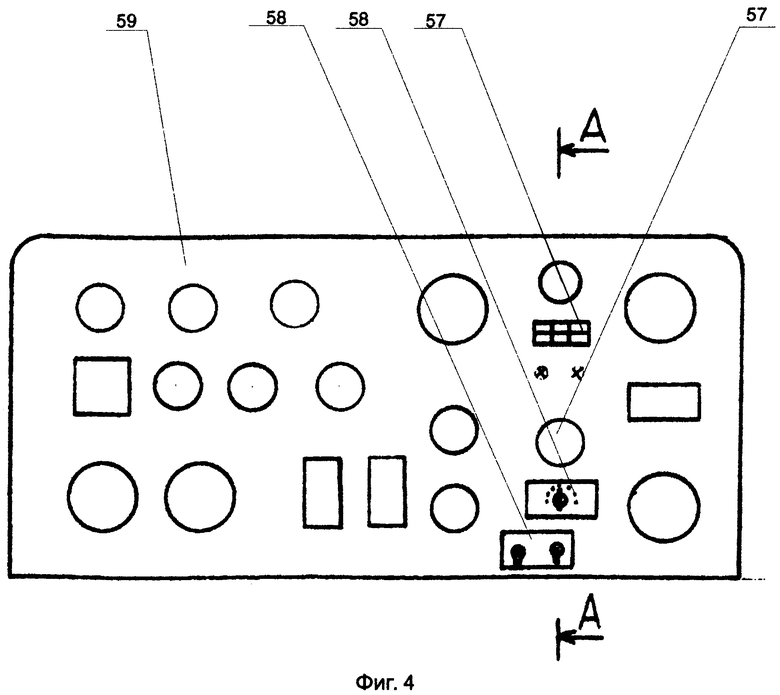
Фиг.4 - вычислительный модуль системы отобрамения приборов с имитаторами реальных органами управления дискретного действия;
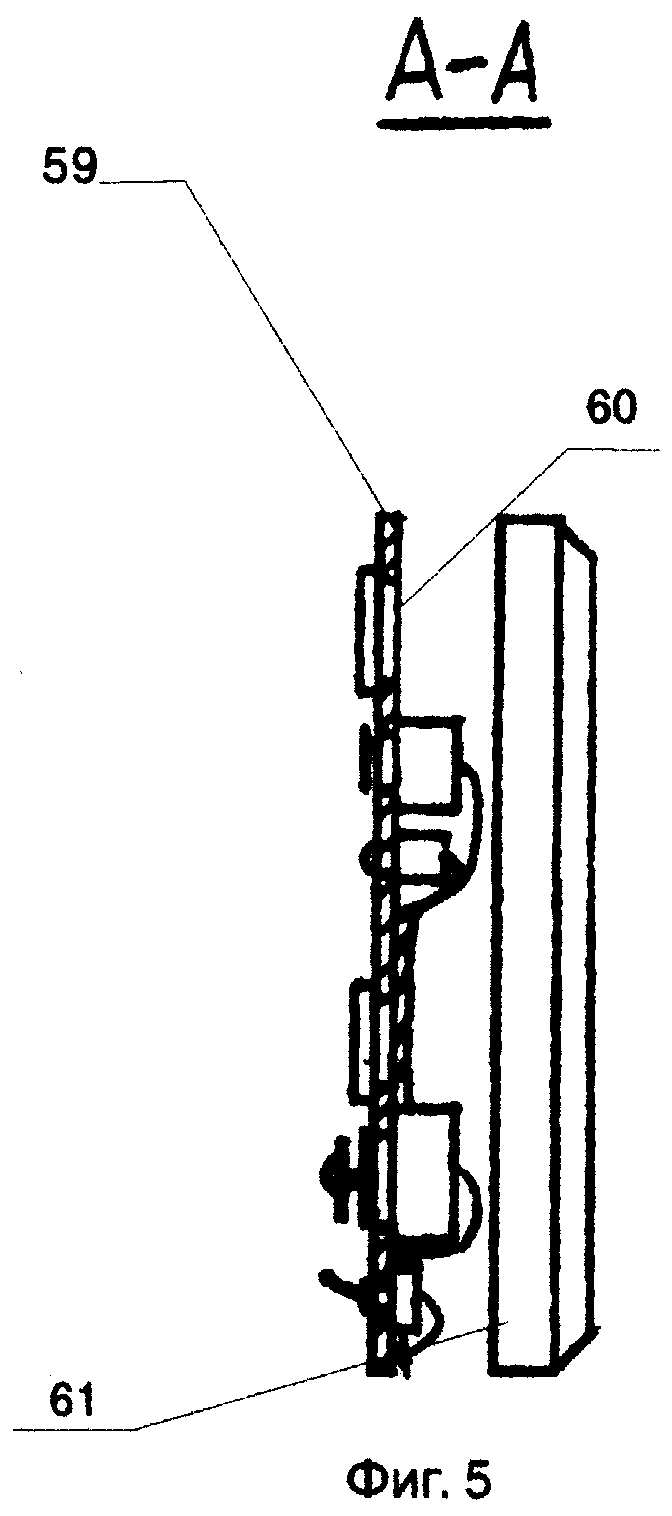
Фиг.5 - разрез А-А на фиг.4;
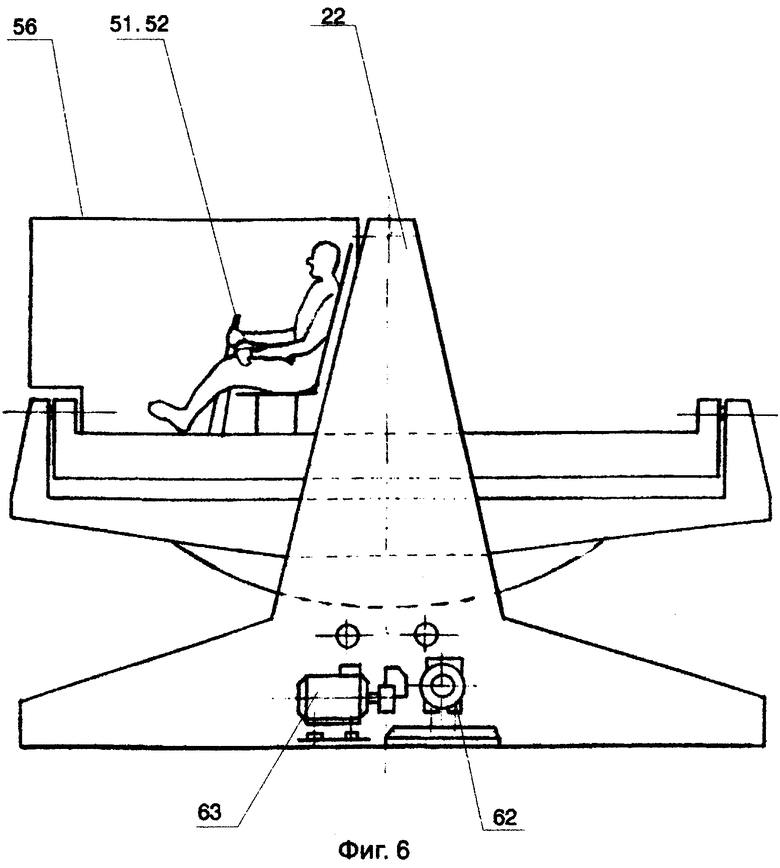
Фиг.6 - индивидуальный пилотажный тренажер РМ летчика;
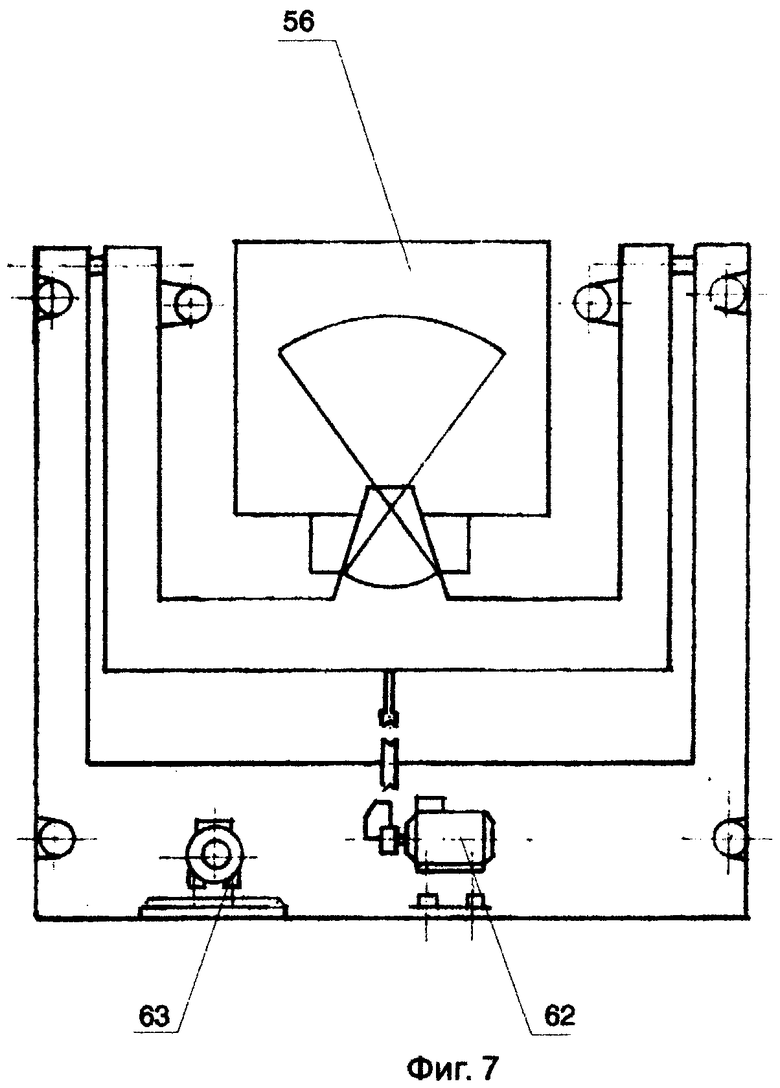
Фиг.7 - вид сбоку на фиг.6;
Фиг.8 - алгоритм функционирования вычислительного комплекса на примере возникновения управляющего воздействия на РУС в кабине летчика;
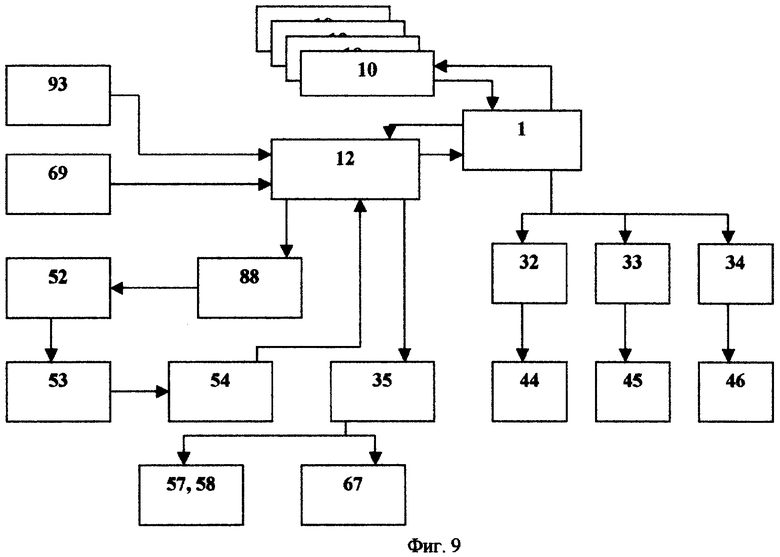
Фиг.9 - схема осуществления связей между дискретными органами управления в кабине летчика и кабине инструктора;
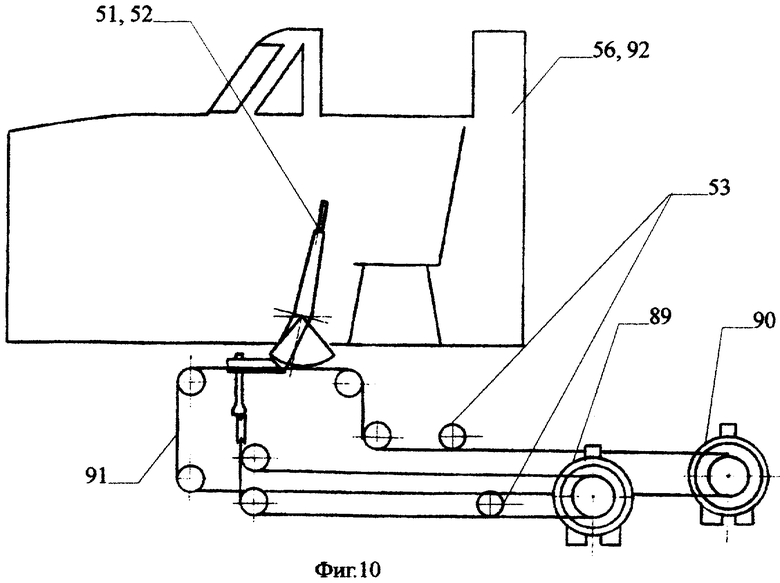
Фиг.10 - адаптивный имитатор загрузки органов управления непрерывного действия.
Предлагаемая комплексная обучающая система для авиационных специалистов содержит тренажеры с оборудованными РМ обучающихся в составе вычислительного комплекса, непосредственно реализующего процесс преобразования информации и управления обучением и тренажом авиационных специалистов различного профиля (см. фиг.1).
Вычислительный комплекс ВК содержит центральный сервер 1, который входит вместе с индивидуальным экраном 2 средств визуализации СВ и устройствами ввода-вывода информации 3 в РМ 4 оператора. Сервер 1 параллельно соединен устройствами ввода-вывода 5, 6, 7, 8, 9 с функционально ориентированными серверами: 10 локальной сети РМ летчиков 11 (от 1 и более РМЛ), сервером 12 локальной сети РМ инструктора 13, сервером 14 локальной сети управляющей наземной службы, в частности - РМ руководителя полетов 15, РМ руководителя зоны посадки 16, РМ группы наземного управления 17, а также с локальной сетью РМ 18 инспектора. При этом с центральным сервером 1, образуя параллельную локальную сеть, последовательно соединены РМ 19 класса анализа средств объективного контроля СОК и разбора полетов с СВ 20 и принтером 21.
РМ обучаемых летчиков представляют собой пилотажные тренажеры 11 с динамическими платформами 22 и установленными на них реальными кабинами ЛА. РМ инструктора оборудовано на пилотажном индивидуальном тренажере 13. РМ управляющей наземной службы расположены на индивидуальных тренажерах, соответственно:
РМ руководителя полетов 15, руководителя зоны посадки 16, РМ группы наземного управления 17.
Центральный сервер 1, управляющий обменом информацией в комплексной обучающей системе между локальными сетями, содержит запоминающее устройство ЗУ, включающее массив баз исходных данных 23, блок моделирования реальных процессов 24 с устройствами моделирования 25, блок объективного контроля обучаемых 26 (фиг.2).
Функционально-ориентированные серверы 10, 12, 14, управляющие обменом информацией в локальных сетях: пилотажных индивидуальных тренажеров 11, 13, индивидуальных тренажеров 15, 16, 17, а также РМ 18 соединены индивидуальными вычислительными модулями ВМ 27-39 с системой визуализации СВ, в том числе бортовой системой визуализации БСВ 41-46, выполненной в виде трех экранов, индивидуальной СВ 47-50, выполненной в виде мониторов.
При этом органы управления 51, 52 непрерывного действия (например, ручки управления самолетом РУС, педали) дистанционно соединены датчиками перемещения 53, каждый из которых последовательно соединен через контроллерную систему 54 с вычислительными модулями ВМ 30, ВМ 35 приборов и арматуры кабины. Параллельно датчикам 53 к контроллерной системе 54 подключены выключатели 55 (фиг.3).
Кабины 56 тренажеров (фиг.3) оснащены приборами контроля 57, арматурой и дискретными органами управления 58 в виде кранов, кнопок и других органов, соответствующими реальным, и смонтированы на щитках, часть из которых выполнена в виде экрана 59 с отверстиями 60 по периметру приборов и индикаторов 57, расположенного перед мониторами 61 (см.фиг.4, 5). Такое выполнение дискретных органов управления позволяет расположить их как в реальной кабине ЛА и, соответственно, выработать у обучаемых летчиков и инструктора навыки работы с реальными органами управления.
Кабины ЛА 56 установлены на динамических платформах 22 с возможностью углового перемещения в двух плоскостях с заданными динамическими характеристиками посредством электродвигателей приводов 62, 63 по тангажу и по крену в зависимости от перемещения ручки управления самолета 51, 52 в кабине 56 обучаемого летчика. Для снижения энергоемкости и повышения быстродействия в приводах 62, 63 платформ 22 используют тросовую проводку (не показано) (см. фиг.6, 7). Поворот вала электродвигателей приводов 62, 63 задается контроллерной системой 54 в зависимости от поворота ручки управления самолета 51, 52 фиксируемого, например, оптико-электронными датчиками перемещения 53.
Сервер 10 пилотажных тренажеров 11 содержит блок моделирования и управления динамической модели ЛА 64, блок управления динамической платформой 65, блок управления радиосвязью между РМ летчиков 66. В локальные сети РМ летчиков входят индивидуальные модули ВМ27,ВМ28, ВМ29 бортовой системы визуализации БВС 41, 42, 43 закабинного пространства. ВМЗО - вычислительный модуль системы отображения приборов 57, управления арматурой 58 кабины и имитации шумов авиадвигателей ЛА 67 и ВМ31 вычислительным модулем системы управления вооружением 68.
РМ инструктора представляет собой индивидуальный тренажер 13 включающий реальную кабину ЛА, имеющий отдельную связь с каждым тренажером 11 обучаемых летчиков, осуществляемую центральным сервером 1. К органам управления 52 относится пульт ввода учебных отказов 69. Сервер 12 инструктора позволяет переключать любую кабину 56, входящую в пилотажные тренажеры 11 на себя, контролировать действия летчика при работе с арматурой в кабине 56 и правильность выполнения упражнений, вмешиваться в процесс управления ЛА, указывая на ошибки в технике пилотирования и самолетовождения. Сервер 12 параллельно соединен с серверами 10 через центральный сервер 1. Сервер 12 содержит блок моделирования и управления динамической модели ЛА 70, блок управления радиосвязью 71. При этом визуальная информация отображается на бортовых средствах визуализации БСВ 44-46 вычислительными модулями ВМ 35-39. Локальная сеть инструктора включает в себя вычислительный модуль системы отображения приборов, управления арматурой кабины и имитации шумов авиадвигателей ВМ 35 и ВМ 36 системы управления вооружением.
РМ руководителя полетов оборудовано на тренажере 15. В модуль 37 тренажера 15 входят блоки дальнего радиолокатора кругового обзора 72, 73, позволяющие просматривать воздушное пространство в различном масштабе, блок радиотехнической системы ближней навигации 74, система командной радиосвязи 75, система управления светотехническим оборудованием аэродрома 76, при этом индивидуальное средство визуализации СВ 47 последовательно соединено с вычислительным модулем ВМ 37 радиотехнической системы ближней навигации и сервером 14.
РМ руководителя зоны посадки оборудовано на тренажере 16 индивидуальными средствами визуализации СВ 48 и последовательно соединено с вычислительным модулем 38 радиотехнической системы посадки и контроля метеообстановки, который включает блок радиолокационной системы посадки 77, систему командной радиосвязи 78, систему управления светотехническим оборудованием аэродрома 79, систему отображения информации метеообстановки 80.
РМ группы наземного (боевого) управления представляет собой тренажер 17 с индивидуальным средством визуализации 49, последовательно соединенным с вычислительным модулем 39 системы управления группы наземного управления и сервером 14. Модуль 39 содержит блок кругового обзора дальнего радиолокатора 81, средства командной радиосвязи 82 для управления ЛА и осуществления взаимодействия между членами боевых расчетов.
Сервер 14 управляющей наземной службы содержит блок управления радиосвязью 83 и блок управления светотехническим оборудованием аэродрома 84.
РМ инспектора 18 оснащено индивидуальной системой визуализации СВ 50, ВМ 40 и соответствующим оборудованием для осуществления контроля за действиями: летных экипажей 85, управляющей наземной службы 86, инструктора 87. Локальная сеть инспектора непосредственно связана с центральным сервером 1 последовательным соединением ВМ 40 управления контролем параметров комплексной обучающей системы РМ инспектора 18.
Центральный сервер 1 последовательно соединен с СВ 20 класса разбора полетов и анализа средств объективного контроля 19 и принтером 21.
При обучении авиационных специалистов комплексная обучающая система обеспечивает реализацию следующих этапов:
- этап предполетной проверки работоспособности оборудования, подготовки его к полетам, отработку навыков работы с реальными органами управления;
- этап постановки задачи;
- этап практической отработки учебных процессов на всех этапах полета, приобретения, развития и укрепления навыков ведения боевых действий как одиночно, так и в составе группы ЛА;
- этап отработки взаимодействия при ведении боевых действий между экипажами и управляющей наземной службой;
- этап разбора и анализа результатов выполнения полетов.
Оператор с РМ 4 производит ввод начальных условий и исходных данных для выполнения задания на вход 3 центрального сервера 1: номер упражнения, географический район, метеоусловия, время суток и года, параметры радионавигационной обстановки района полетов, конфигурации комплекса на тренировку, параметры имитации вероятного противника - динамических объектов и другие. Оператор с РМ 4 осуществляет контроль состояния всего вычислительного комплекса, выдачи звуковых и световых сигналов при возникновении аварийной обстановки.
Управление учебными полетами осуществляет руководитель полетов со своего РМ 15. Им же производится управление движением ЛА в ближней и дальней зоне, формирование потоков самолетов, заходящих на посадку, управление движением в зоне посадки. Руководитель полетов осуществляет отработку навыков взаимодействия с летными экипажами управляющей наземной службы, например, группой боевого управления. Анализ воздушной и метеорологической обстановки осуществляется на РМ 15 руководителя полетов.
Серверы 10 индивидуальных пилотажных тренажеров 11 осуществляют определение положения каждого ЛА в пространстве (координаты и высота полета) и передают эту информацию на индивидуальные серверы 10 других пилотажных тренажеров 11, сервер 12 инструктора и сервер 14 управляющей наземной службы.
На этапе практической отработки учебных процессов информация, необходимая обучаемому выдается на индивидуальные СВ вычислительного модуля каждого РМ.
РМ летчиков, оборудованные на пилотажных тренажерах 11 позволяют производить проверку оборудования и арматуры кабины 56 перед полетом, подготовку к запуску, запуск и управление двигателем на земле и в полете.
В зависимости от полетного задания летчики производят руление, взлет, набор высоты, все виды полетов, выполнение фигур высшего пилотажа. Отработку навыков индивидуального самолетовождения и в группе слетанности, предпосадочное снижение, заход на посадку визуально и с применением радиотехнических и навигационных средств, применения специального оборудования.
Функционирование комплексной обучающей системы поясняется на примере возникновения управляющих воздействий при отклонении летчиком в кабине 56 одного из индивидуальных тренажеров 11 ручки управления самолетом РУС, являющейся органом управления непрерывного действия 51 (см. фиг.8). Датчик перемещения по тангажу или крену 53 регистрирует перемещение РУС 51. Далее сигнал в электрическом виде поступает в контроллерную систему 54, где преобразуется в управляющий сигнал для вычислительного комплекса ВК. В таком виде сигнал поступает на вход сервера 10 индивидуального тренажера 11. В сервере 10 сигнал поступает в блок моделирования и управления динамической модели ЛА 64. Блок 64, решая уравнение движения конкретного ЛА, выдает на своем выходе параметры вновь установившегося движения ЛА, в данном примере изменение высоты полета, в виде управляющих сигналов на вычислительные модули локальной вычислительной системы 30 или другие серверы 10, которые преобразуют эти сигналы в зависимости от заложенного в них алгоритма в управляющие сигналы для исполнительных устройств.
Вычислительные модули ВМ 27, 28, 29 выдают управляющий сигнал на систему бортовой визуализации БСВ 41, 42, 43 и соответственно сигналу изменяют отображение закабинного пространства.
Блок управления динамической платформой ЛА 65 сервера 10 выдает управляющий сигнал на контроллерную систему 54, управляющую электродвигателями 62, 63. При повороте вала двигателей 62, 63 на заданный угол происходит соответствующее натяжение тросовой проводки приводов 62, 63 и поворот динамической платформы 22 с кабиной 56 ЛА, соответственно, по тангажу или крену.
Такой же сигнал с сервера 10 индивидуального тренажера 11 выдается на сервер инструктора 12, в случае, когда сервер 10 данного тренажера 11 подключен к серверу инструктора 12. В этом случае управляющий сигнал с сервера 12 подается на ВМ 32, 33, 34, которые в свою очередь выдают управляющие сигналы на систему бортовой визуализации БСВ 44, 45, 46. ВМ 35 формирует управляющие сигналы для системы отображения приборов контроля. Управляющий сигнал, поступающий на привод РУС 52 тренажера инструктора 13, перемещает РУС 52 инструктора на величину, равную отклонению РУС 51 обучаемого летчика.
С сервера 10 индивидуального тренажера 11 сигнал поступает на центральный сервер 1, где блок 23 решает навигационные задачи, например определение местоположения ЛА в пространстве в текущий момент времени (координаты самолета: географическая широта, долгота и высота полета). Навигационная информация в виде управляющих сигналов подается на вход сервера 14.
С сервера 14 управляющей наземной службы информация подается на соответствующие вычислительные модули ВМ 37, 38, 39, которые принимают, обрабатывают и выдают управляющие сигналы на СВ 47, 48, 49 РМ руководителя полетов, группу наземного управления, руководителя зоны посадки.
С центрального сервера 1 через ВМ, в котором информация обрабатывается и выдается для анализа в удобном для представления на РМ инспектора 18 виде, она подается для осуществления контроля за действиями всех участников обучения (тренировки).
Между серверами инструктора 12 и обучаемых летчиков 10 передача информации происходит в обоих направлениях следующим образом (фиг.9).
Сигнал о положении ОУ 51 в кабине 56 обучаемого летчика через сервер 10 и центральный сервер 1 поступает на сервер инструктора 12. Сервер 12 выдает управляющие сигналы на механизм загрузки ОУ 88, который работает в двух режимах.
Первый - при получении команды от сервера 10 РМ 11 летчика механизм загрузки ОУ 88 является исполнительным механизмом, который посредством электроприводов 89, 90 и тросовой проводки 91 перемещает ОУ 52 в кабине инструктора 92 синхронно перемещению ОУ в кабине 56 обучаемого летчика (фиг.10).
Второй - при отклонении ОУ 52 инструктором механизм загрузки 88 загружает эти ОУ согласно алгоритму, заложенному в соответствующем блоке ВК и соответствующем загрузке органов управления реального ЛА.
Сигналы о положении ОУ 51 в кабине 56 обучаемого летчика, трансформируясь в ВМЗО в сигналы, обеспечивающие работу имитаторов приборов, а также имитаторов шумов двигателей через серверы 10 индивидуальный пилотажный тренажеров 11, центральный сервер 1 и сервер инструктора 12 поступают на ВМ 32, 33, 34, 35 и выдаются с них в виде управляющих сигналов на систему визуализации закабинного пространства, имитатор шумов двигателей, приборы и органы управления кабины инструктора.
От сервера 12 РМ 13 инструктора на сервер 10 летчика могут подаваться следующие сигналы.
Сигнал с переключателя выбора кабины 93 контролируемого летчика через сервер 1 поступает на сервер 10 индивидуального тренажера 11, где осуществляется подключение выбранного индивидуального сервера 10 требуемой кабины 56 к серверу инструктора 12. Далее все сигналы на сервер инструктора поступают только с этого сервера 10 до момента нового переключения.
Сигнал о вводе учебного отказа поступает с пульта 69 ввода учебных отказов через сервер 12, сервер 1 на соответствующий сервер 10, далее через ВМ 30 на приборы и арматуру кабины 56 обучаемого летчика.
Сигналы о положении ОУ 52 в кабине инструктора 92 поступают через сервер 12, на сервер 1 и далее на соответствующий сервер 10 индивидуального тренажера 11. Сервер 10 выдает управляющие сигналы на механизм загрузки 88 ОУ 51, который посредством электроприводов 89, 90 и тросовой проводки 91 перемещает ОУ 51 в кабине 56 обучаемого летчика синхронно перемещению ОУ 52 в кабине инструктора 92.
Заключительный этап проведения обучения проводят в классе разбора полетов и анализа средств объективного контроля 19, система визуализации 20 которого последовательно соединена с центральным сервером 1, запоминающее устройство которого содержит блок моделирования реальных процессов 23 и блок объективного контроля обучаемых 25. При этом параметры, например, о положении ЛА в конкретный момент времени для проведения ОК и другие параметры выполнения учебных полетов, диаграммы, схемы, траектории движения ЛА и т.д., необходимые для проведения разбора полетов воспроизводятся на СВ 20 класса или распечатываются в бумажном виде на принтере 21.
Опытный образец предложенного устройства комплексной обучающей системы авиационных специалистов изготовлен в составе пилотажных тренажеров с динамической платформой, обеспечивающей угловые перемещения кабины от -45 град. до +45 град. по тангажу и крену.
Для размещения комплексной обучающей системы с четырьмя РМ летчиков и РМ управления наземной службы необходимо помещение площадью 230 кв.м. и высотой 4 м. Потребляемая мощность комплекса составляет 65 кВт, источник питания - 3-х фазный ток 380В, 50гц.
Предложенное устройство комплексной обучающей системы для авиационных специалистов позволяет производить обучение при различном сочетании номенклатуры РМ и количества обучаемых.
Проведенные испытания показали, что наличие комплексной обучающей системы в составе авиационной части позволяет в значительной степени повысить уровень подготовки летного состава и взаимодействующих с ним наземных служб.
Литература
/1/ Патент RU 2087037, G 09 B 9/08, от 28.06.94, оп. бюл. №25 от 10.08.97.
/2/ Полезная модель RU №10479, G 09 B 9/08, от 14.08.98, оп. бюл. №7, 16.07.99 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| Стенд подготовки пилотов летательных аппаратов | 2017 |
|
RU2674548C1 |
| КРЕСЛО ПИЛОТАЖНОГО ТРЕНАЖЕРА С ИМИТАТОРАМИ ВИБРАЦИЙ И ШУМА | 2002 |
|
RU2249253C2 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2014 |
|
RU2547955C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ПРИБОРНАЯ ДОСКА КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА | 2002 |
|
RU2267815C2 |

Изобретение относится к авиационной технике и предназначено для профессиональной подготовки летного состава и взаимодействующих с ним в процессе выполнения полетов наземных служб. Система содержит вычислительный комплекс. Центральный сервер этого комплекса параллельно соединен с функционально ориентированными серверами локальных сетей. Локальные сети связывают вычислительный комплекс с рабочими местами обучаемых и специалистов: летчиков, инструктора, руководителя полетов, руководителя зоны посадки, группы наземного управления, инспектора. Для обслуживания вычислительного комплекса предусмотрено рабочее место оператора. Запоминающее устройство центрального сервера содержит массив баз исходных данных, блок моделирования реальных процессов с устройствами моделирования и блок объективного контроля обучаемых. Изобретение позволяет максимально приблизить обучение и взаимодействие специалистов летных экипажей и наземных служб к реальным условиям полетных тренировок. 4 з.п. ф-лы, 10 ил.
| Способ приготовления пластической массы | 1931 |
|
SU24583A1 |
| Транспортерное устройство к торфяным установкам | 1927 |
|
SU10479A1 |
| УНИФИЦИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР | 1994 |
|
RU2087037C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156501C1 |
| Тренажер пилота | 1981 |
|
SU1024967A1 |

