жения, второй вход и выход которого являются первым входом и выходом блока соответственно, выход второго узла интегрирования подключен к первому входу пятого сумматора, второй вход которого является .вторым вхо дом блока. k. Тренажер по п.1, от я-и ч а ю щ и и с я тем, что в нем бло регулирования динамики двигателя содержит четвертый функциональный пре .образователь последовательно включенные узел возведения в квадрат, первый усилитель, третий узел умножения, четвертый узел умножения, первый узел деления и второй узел - деления, выход которого является пе 7 вым выходом блока и последовательно соединенные второй усилитель, пятый узел умножения и третий усилитель, выход которого подключен ко второму ВХОДУ первого узла деления, выход которого является вторым выходом блока, второй вход пятого узла умно-, жения является первым входом блока, входы узла возведения в квадрат и четвертого функционального преобразователя - вторым входом блока, а . вход второго усилителя и второй вход четвертого узла умножения - третьим и четвертым входами блока соответственно, второй вход третьего узла умножения соединен с выходом четвертого функционального преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2021 |
|
RU2774566C1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| ПРОГНОЗИРУЮЩАЯ СИСТЕМА ОЦЕНКИ ЛЕТЧИКА ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1991 |
|
RU2006958C1 |
| Вычислитель угла атаки | 1983 |
|
SU1129630A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| Устройство для моделирования турбореактивного двигателя | 1974 |
|
SU488228A1 |

1
Изобретение относится к автоматике и вычислительной технике, в маетности к авиационным тренажерам для обучения управления воздушными транспортными средствами.
Известны тренажеры, в которых моделирующее устройство динамики дви-. гателей служит для выработки сигналов, характеризующих режим работы двигателя 7тяга, частота вращения, температура газов). Сигналы тяги от модели двигателя подаются в моДель динамики полета, сигналы частоты вращения компрессоров - в модель оборудования и на имитаторы приборов. На имитаторы приборов подаются также сигналы температуры газов. При этом, .инерционные свойства турбореактивных двигателей моделируются лишь приближено для номинального режима. Он содержит пульт управления с после довательно подсоединенными к нему имитатором статических характеристик и вычислителем динамики полета самолета l.
Данный тренажер отличает большая сложность и практическое отсутствие возможности учесть динамические характеристики силовой установки, также как приемистость и сброс тяги Кроме того, такие характеристики ка температура..выходящих газов и обороты ротора высокого давления, не являются актуальными и практически
«е служат для обучения навыкам управ ления летнего состава.
Известен также тренажер, в кото/ром блок динамики двигателей выполнен, например, в виде следящего привода с функциональным преобразователем потенциометрического типа 2 .
Известный тренажер позволяет моде лировать динамику, авиационной двигательной установки на определенном заранее заданном режиме полета самолета, недостатком такого тренажера является отсутствие возможности исследователь поведение самолета в переходных режимах - взлет, набор высоты, снижение и посадка, в которых достаточно быстро изменяются режимы полета самолета. В данной 0 модели не учитывается зависимость динамики авиационной двигательной установки от режима ее работы, что также значительно сужает диапазон применения тренажера Г
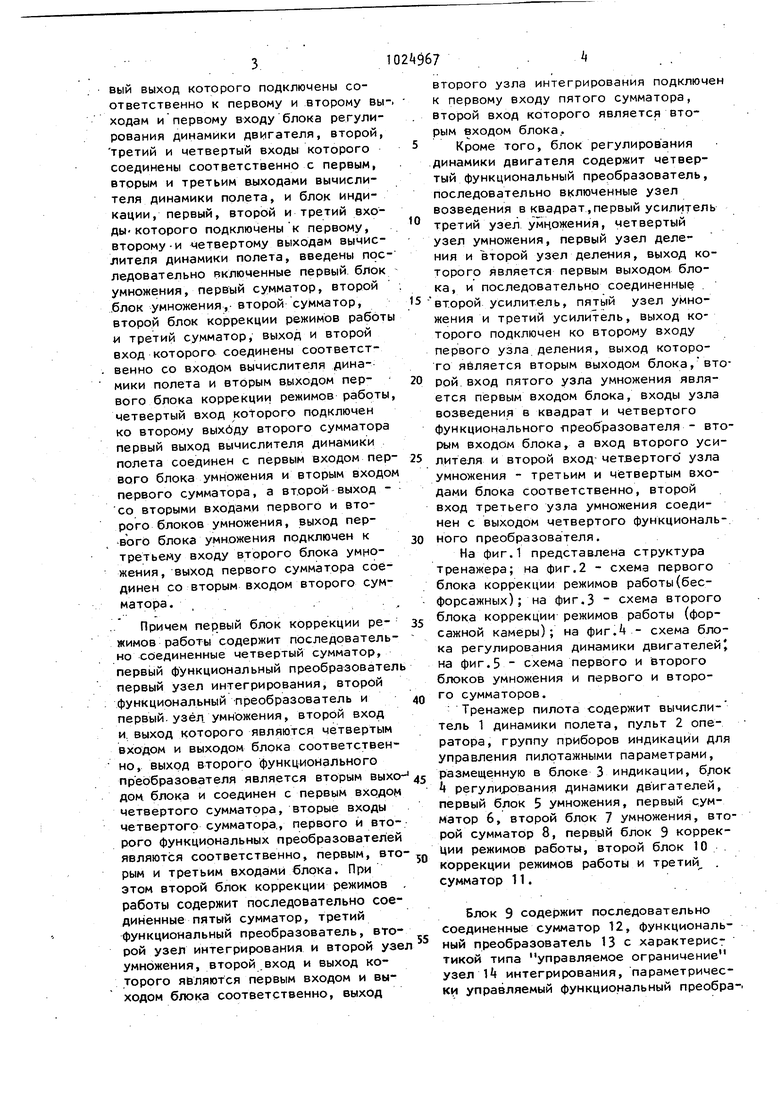
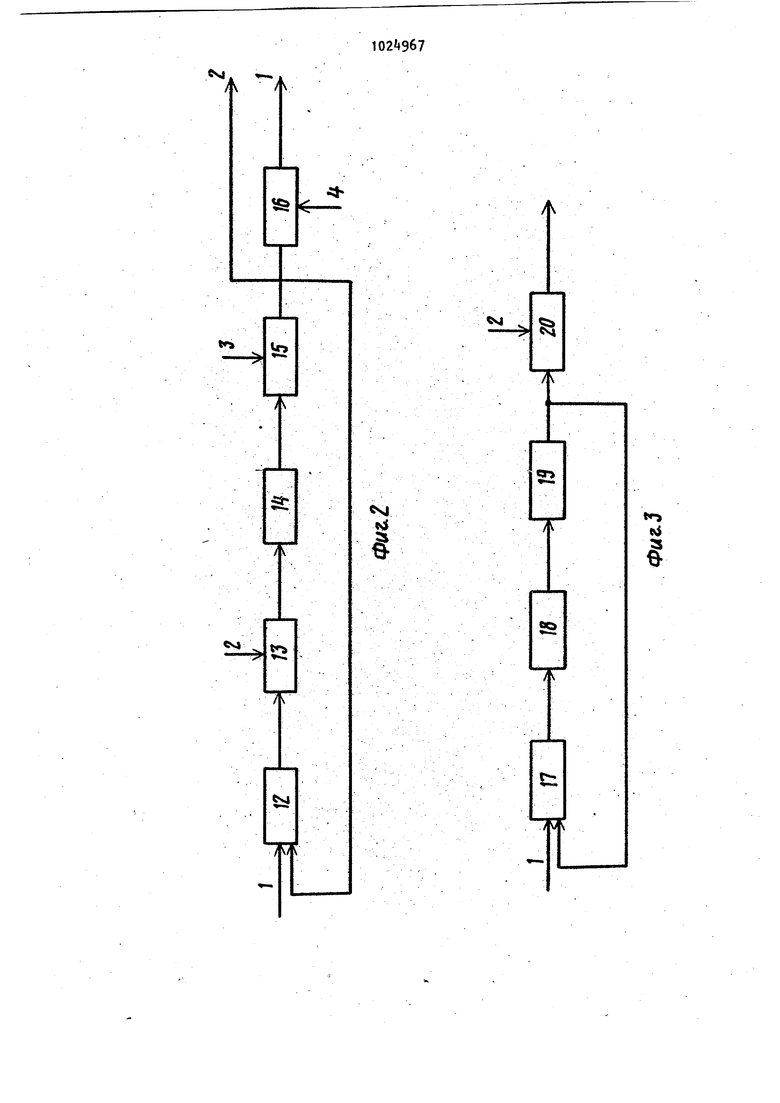
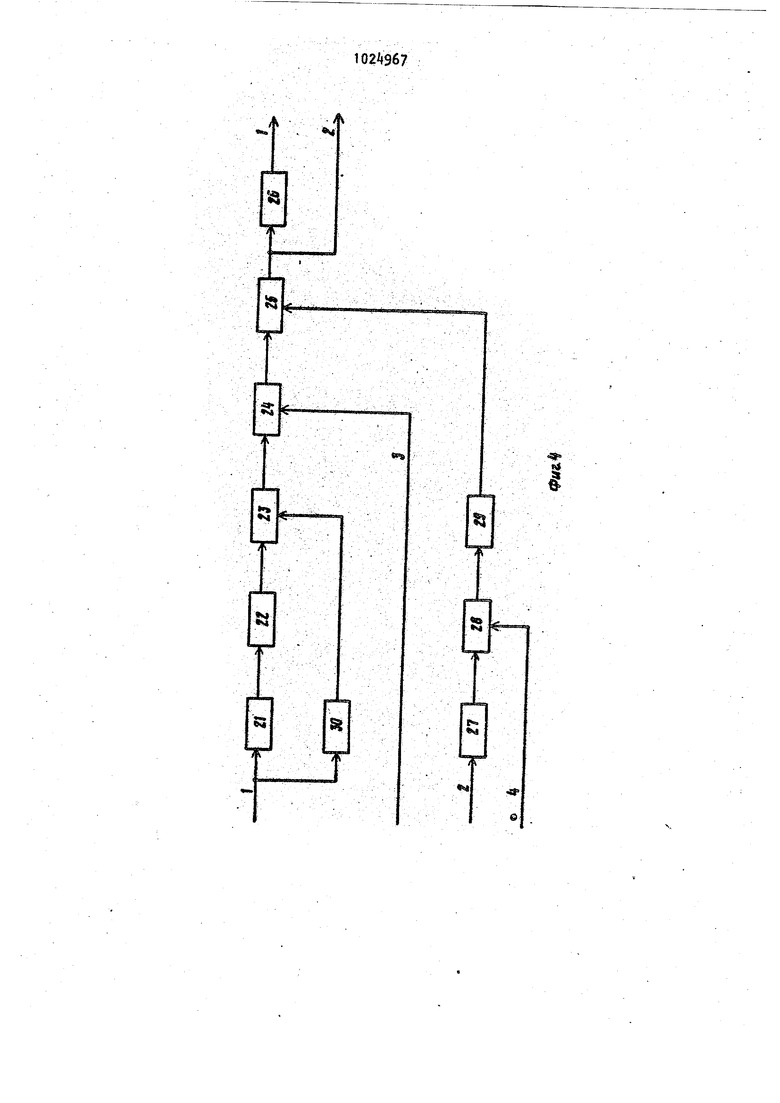
Целью изобретения является расширение дидактических возможностей и повышение точности тренажера, повышающее сходимость результатов стендовых и летных испытаний. 0 Поставленная цель достигается тем, что тренажер пилота, содержащий пульт оператора, первый выход которого соединен с. первым входом первого блока коррекции-режимов , второй и третий входы и первый выход которого подключены соответственно к первому и второму вы ходам ипервому входу блока регулирования динамики двигателя, второй, третий и четвертый входы которого соединены соответственно с первым, вторым и третьим выходами вычислителя динамики полета, и блок индикации, первый, второй и третий входы- которого подключены к первому, второму-и четвертому выходам вычислителя динамики полета, введены последовательно включенные первый, блок умножения, первый сумматор, второй .блок умножения,- второй сумматор, второй блок коррекции режимов работы и третий сумматор, выход и второй вход которого соединены соответственно со входом вычислителя динамики полета и вторым выходом первого блока коррекции режимов работы четвертый вход которого подключен ко второму выхбду второго сумматора первый выход вычислителя динамики полета соединен с первым входом пер вого блока умножения и вторым входо первого сумматора, а второй выход со вторыми входами первого и второго блоков умножения, выход пер-вого блока умножения подключен к третьему входу второго блока умножения, выход первого сумматора соединен со вторым входом второго сумматора.. . Причем первый блок коррекции режимов работы содержит последовательно ссэединенные четвертый сумматор, первый функциональный преобразовател первый узел интегрирования, второй функциональный -преобразователь и первый. узёл умножения, второй вход и. выход которого являются четвертым входом и выходом блока соответственно, выход второго функционального преобразователя является вторым выхс дом блока и соединен с первым входом четвертого сумматора, вторые входы четвертогр сумматора., первого и второго функциональных преобразовател1ей являются соответственно, первым, вто рым и третьим входами блока. При этом второй блок коррекции режимов работы содержит последовательно соединенные пятый сумматор, третий функциональный преобразователь, второй узел интегрирования и второй узе умножения, второй .вход и выход которого Я6ЛЯЮТСЯ первым входом и выходом блока соответственно, выход второго узла интегрирования подключен к первому входу пятого сумматора, второй вход которого является вторым входом блока. Кроме того, блок регулирования динамики двигателя содержит четвертый функциональный преобразователь, последовательно включенные узел возведения в квадрат,первый усилитель третий узел умножения, четвертый узел умножения, первый узел деления и второй узел деления, выход которого является первым выходом блока, и последовательно соединенные второй усилитель, пять1Й узел умножения и третий усилитель, выход которого подключен ко второму входу первого узла деления, выход которого является вторым выходом блока,второй, вход пятого узла умножения является первым входом блока, входы узла возведения в квадрат и четвертого функционального яреобразователя - вторым входом блока, а вход второго усилителя и второй вход четвертого узла умножения - третьим и четвертым входами блока соответственно, второй вход третьего узла умножения соединен с выходом четвертого функционального преобразователя. На фиг.1 представлена структура тренажера; на фиг.2 - схема первого блока коррекции режимов работы(бесфорсажных ); на фиг.З схема второго блока коррекции режимов работы (форсажной камеры); на фиг.4 - схема блока регулирования динамики двигателейt на фиг.5 - схема первого и второго бхюков умножения и первого и второго сумматоров. - Тренажер пилота содержит вычислитель 1 динамики полета, пульт 2 оператора, группу приборов индикации для управления пилотажными параметрами, размещенную в блоке 3 индикации, блок t регулирования динамики двигателей, первый блок 5 умножения, первый сумматор 6, второй блок 7 умножения, второй сумматор 8, первый блок 9 коррекции режимов работы, второй блок 10 коррекции режимов работы и третий . сумматор 11. Блок 9 содержит последовательно соединенные сумматор 12, функциональный преобразователь 13 с характеристикой типа управляемое ограничение узел It интегрирования, параметрически управляемый функциональный преобра-.
5
зователь 15 с управляемой постоянной времени и узел 16 умножения.
Блок t О содержит последдвательно соединенные сумматор 1/, функциональный преобразо&атель 18 с характеристикой типа ограничение, узел 19 интегрирования и узел 20 умножения.
Блок k содержит последовательно соединенные узел 21 возведения в .кварат, усилитель 22, узлы умножения 23 и-2 и узлы деления 25 и 2б, последовательно соединенные усилитель 27, узел 28 умножения .и усилитель 29, а также функциональный преобразователь 30 с характеристикой типа зона нечувствительности.
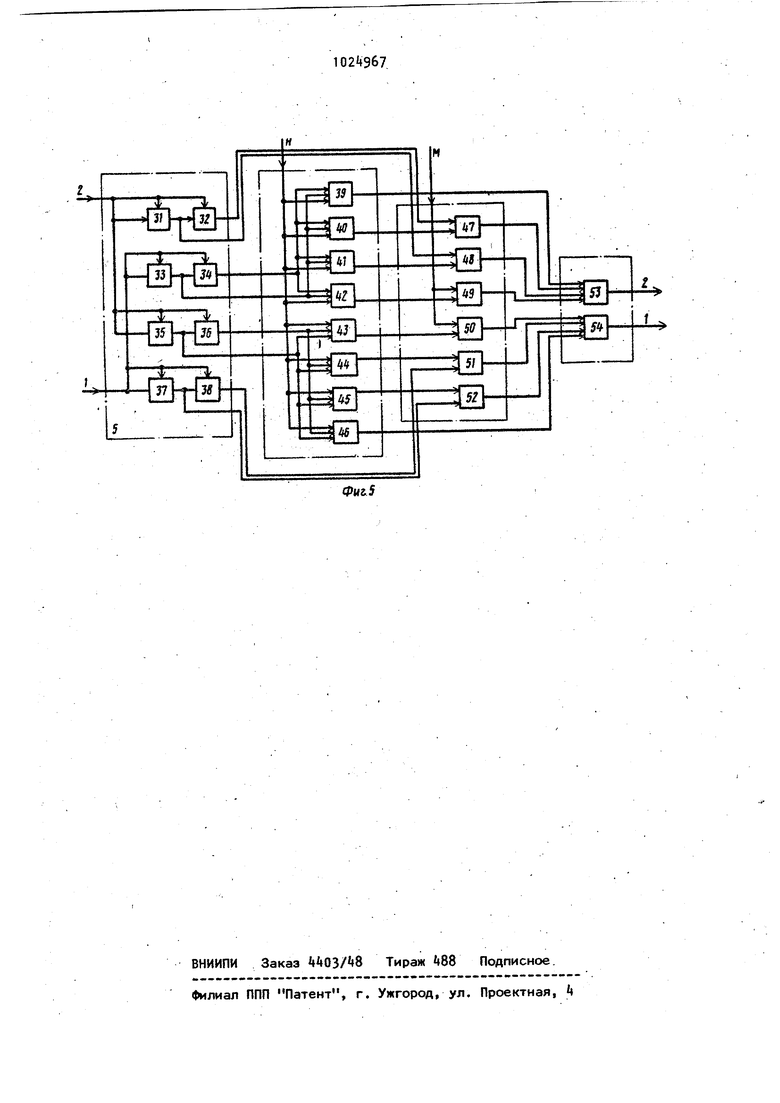
Влок 5 содержит восемь множительных узлов 31-38, соединенных между собой и с выходами вычислителя 1 в сответствии со схемой, приведенной
на фиг.5.
Блок 6 содержит восемь суммирующих узлов , соединенных между собой, с выходом вычислителя 1 и с четырьмя выходами блока 5 в соответствии со схемой, приведенной на
фиг.5.
Блок 7 содержит mecTjs множительных узлов it7-52, соединенных с выходом вычислителя 1, с. выходами блока 6 и с выходами .блока 5 в соответствий со схемой, приведенной на фи г.5.
Блок 8 содержит два суммирующих узла 53 и 5 соединенных с выходами блока 7 и выходами сумматора 6 в соответствии со схемой приведенной на фиг.5.
Тренажер пилота работает следующим образом.
При перемещении ручки управления двигателей на пульте 2 формируется электрический сигнал, пропорциональный углу отклонения ручки (, ), который поступает а схемы моделирования работы турбореактивного двигателя, в бесфорсажном режиме (блок 9) и форсажной камеры (блок 10). Результирующий сигнал, пропорциональный тяге турбореактивного двигателя, формируется на выходе сумматора П и поступает.на вход вычислителя 1, текущие характеристики которого (высота полета, скорость полета, тангаж крен, курс и т.д.) выводятся на группу приборов индикации блока 3. БЛОКИ и сумматоры 5,6,7 и 8 осуществляют вычисление эысотно-скоростных характеристик турбореактивного
2 9676
двигателя (ТРД) на бесфорсажном режиме полета и форсажной камеры. Такое разделение моделей объясняется различными динамическими и статичес
5 кими характеристиками элементов турбореактивного двигателя и форсажной камеры. Блок i регулирования динамики двигателя осуществляет параметрическую коррекцию динамики бесфор10 сажного режима работы турбореактивного двигателя в зависимости от высоты, скорости полета и режима работы ТРД.
Модель ТРД в бесфорсажном, режиме
15 представляет собой следящую систему и работает следующим образом. Сигнал пропорциональный ft руд , поступает на вход динамической следящей системы | блоки 12-15/. Преобразователь 13 представляет собой нелинейность типа управляемое ограничение и совместно с узлом Ik отображает работу автомата приемистости, обеспечивающего разгон ТРД с необходимым запасом устойчивости компрессора высокого давления ТРД по помпажу. При этом величина уровня ограничения преобразователя 13 определяется величиной приведенного расхода воздуха на входе в компрессор высокого давления и режимом работы ТРД, т.е. положением рабочей точки на напорной характеристике компрессора высокого давления ТРД. Управляемое апериодическое звено преобразователя 15 имеет изменяющихся масс ТРД. Эта постоянная времени зависит от приведенного расхода воздуха на входе в ТРД и режима его работы вследствие изменения величины вращающегося момента турбин .от скорости их вращения и расхода воздуха , через ТРД. Обратная связь в этой следящей системе заводится с выхода преобразователя 15 на вход сумматора 12, Сигнал на выходе преобразователя
45 15 представляет собой безразмерную величину, соответствующую относительной приведенной тяге ТРД в бесфорсажном режиме.
Схема, моделирующая динамику работы форсажной камеры, также выполнена в виде следящей системы. Она работает следующим образом. Сигнал, пропорциональный отклонению oi рул f oступает на вход следяшей системы.
JJ Следящая система, содержащая сумматор 17, преобразователь типа ограничение 18 и узел интегрирования 19, моделирует работу исполнительных органов форсажной камеры и практически не зависит от режима полета самолета. Сигнал на выходе узла 19 представляет собой относительную величину увеличения тяги за счет включения форсажной камеры.
Для получения текущей величины добавки тяги ТРД при включении форс)ажной камеры выходной сигнал с узла 19 поступает на вход узла 20 совмест но с сигналом сумматора 8. Сигнал, соответствующий величине полной тяги форсированного ТРД, снимается с сумматора 11 и поступает на вход вычислителя динамики полета.
Схема вычисления высотио-скоростных характеристик ТРД (фиг.5} представляет собой Последовательно включенные блоки 5,6,7 и 8.
В качестве исходной информации блоки получают текущие значения высоты и скорости полета от вычислителя 1. Одним выходом.сумматора 8 являются высотно-Скоростные характеристики ТРД для максимальной бесфорсажной, тяги, а другим выходом высотно-скоростные характеристики форсажной камеры на максимальном режиме ее работы.
В случае необходимости порядок аппроксимации может бь1ть увеличен, что при&одит к соответствующему увеличению числа элементов сумматоров 6
8 и блоков 5 и 7, но не изменяет структуры построения схемы (фиг.5).
Блок k формирует сигналы управления величиной ограничения преобразователя 13 Гфиг.Л) и постоянной времени управляемого апериодического звена преобразователя 15 в зависимости- от текущих значений высоты и скорости полета (числа М полета ) и режима работы ТРД (относительной бесфорсажной тяги). В результате математических операций, реализуемых узлами 2, 25 и 26, согласно уравнению (УШ) формируются величины постоянной времени вращающихся масс ТРД и коэффициента передачи нелинейного элемента в преобразователе 13,
Таким образом, предлагаемое техническое решение позволяет проводить стендовые испытания самолетных систем и тренировку летнего состава во всем диапазоне возможных режимов Колета самолета с использованием модели силовой установки,
динамические и статичес.кие характеристики которой близки к реально существующим. Вследствие этого повышается сходимость стендовых и лет|ных испытаний, появляется возможность исследовать переходные режимы полета самопета, что ведет к сокращению объема летных испытаний, т.е. экономятся средства и полетное время.
/ / W
s|
n«r
esifo
«
I
J
«SI
esi.
A /
«
Vr
й.
vv
ем
t
«4j
t tvi
/
I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| В.А.Боднёр и др | |||
| Авиацирнные тренажеры | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
