Настоящее изобретение относится к способам управления силовым агрегатом.
Подобный способ, соответственно подобное устройство известны, например, из DE 19536038 А1 (патент US 5692472). Согласно этой публикации в процессе управления силовым агрегатом транспортного средства некоторая величина, характеризующая выходной параметр силового агрегата, сравнивается в целях контроля с заданным для этой величины максимально допустимым значением и, если эта величина превышает заданное максимально допустимое значение, активизируются соответствующие ответные меры в качестве реакции на выявленную ошибку или сбой. Примером выходных параметров силового агрегата служат отдаваемая им мощность или развиваемый им крутящий момент, например индикаторный крутящий момент, выходной крутящий момент и иные величины. В одном из вариантов в процессоре, осуществляющем управление силовым агрегатом, предусмотрено по меньшей мере три отделенных один от другого программных уровня, при этом все вычисления, связанные с указанным выше сравнением, проводимым в целях контроля, выполняется на втором программном уровне. К первому программному уровню относятся в основном программы, предназначенные для выполнения различных вычислений, связанных с функциями управления силовым агрегатом. В другом варианте заданное значение, на основании которого происходит управление некоторым рабочим параметром силового агрегата, ограничивают на первом программном уровне максимально допустимым значением.
Обычно в качестве такого максимально допустимого значения при отсутствии задаваемого водителем управляющего воздействия задают наибольшее из значений выходной величины, на которое эту выходную величину можно установить с помощью системы регулирования частоты вращения при холостом ходе. Благодаря этому обеспечивается неограниченная приемистость двигателя. Однако на выходную величину или выходной параметр силового агрегата и прежде всего у транспортных средств с двигателем малой мощности, малым сопротивлением качению или малым внутренним трением существенное влияние оказывают дополнительные потребители, такие как компрессор кондиционера, преобразователь крутящего момента и иные системы, и поэтому для обеспечения приемлемой приемистости двигателя допустимые значения необходимо задавать сравнительно большими.
Для повышения точности задания допустимого значения выходной величины в заявке DE 19739565 А1 было предложено несколько увеличивать это максимально допустимое значение непосредственно после пуска холодного двигателя на период его прогрева, что обеспечивает возможность нормальной работы дополнительных функций в этот период времени и одновременно с этим позволяет по его истечении сравнительно точно задавать максимально допустимое значение и, как следствие, с достаточно высокой эффективностью выявлять ошибки и сбои. Однако при использовании этого известного способа различия проводятся только между двумя режимами работы.
Из заявки DE 19963759.8, поданной 30.12.1999, известен способ определения допустимого значения путем взвешивания с использованием максимально допустимого значения, задаваемого водителем, в пределах между максимальным и минимальным допустимыми значениями. При этом в отдельном контуре дополнительно проверяются и учитываются допустимые запросы на повышение крутящего момента от дополнительных потребителей и регулятора частоты вращения при холостом ходе. При обнаружении ошибок в вычислениях этих компонент их соответствующим образом ограничивают.
Общий для всех описанных выше технических решений недостаток состоит в том, что они не во всех случаях обеспечивают получение оптимальных результатов.
Для устранения вышеупомянутого недостатка предложено три варианта способа управления силовым агрегатом.
В первом варианте предложенный способ заключается в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры, при этом максимально допустимое значение формируют в зависимости от положения педали акселератора и по меньшей мере в одном режиме работы подвергают фильтрации с учетом динамических характеристик впускного трубопровода двигателя внутреннего сгорания (ДВС). Отличие этого способа от рассмотренных выше известных решений состоит в том, что при фильтрации используют звено запаздывания, позволяющее учитывать характерное для впускного трубопровода время запаздывания.
В частных случаях осуществления предложенного способа фильтр и/или звено запаздывания может быть инициализировано, если зарегистрировано отпускание педали акселератора. Кроме того, в качестве максимально допустимого значения может использоваться подвергнутое фильтрации значение, если зарегистрировано отпускание педали акселератора, или не подвергнутое фильтрации значение, если подвергнутое фильтрации значение меньше не подвергнутого фильтрации значения.
Во втором варианте предложенный способ заключается в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры. Отличие этого способа от рассмотренных выше известных решений состоит в том, что максимально допустимое значение непрерывно уменьшают в зависимости от удаления по меньшей одной характеризующей определенный режим работы величины от предельного значения.
В частных случаях осуществления второго варианта предложенного способа для определения величины уменьшения максимально допустимого значения может использоваться так называемые сплайны.
Преимущество, связанное с использованием так называемых сплайнов, состоит в возможности обеспечить непрерывное и плавное уменьшение допустимых значений выходной величины в критических режимах работы двигателя. По сравнению с обычным, основанным на двоичном управлении уменьшением допустимых значений преимущество предлагаемого в изобретении подхода состоит в том, что подобное уменьшение происходит не скачкообразно, благодаря чему исключается опасность возникновения переходных колебаний и тем самым скачкообразных изменений нагрузки, воспринимаемых водителем как слишком резкие.
Допустимое значение уменьшают при отпускании педали акселератора или нажатии на педаль тормоза, а также при превышении частотой вращения вала двигателя заданной частоты вращения при холостом ходе. Таким образом, согласно одному из предпочтительных вариантов уменьшение допустимых значений выходной величины происходит при обнаружении любой ошибки или сбоя, а в других вариантах - только при обнаружении определенных ошибок или сбоев, в частности по меньшей мере в том случае, когда приводящие к увеличению выходной величины ошибки воспринимаются водителем как создающие наибольшие неудобства, т.е. при отпущенной педали акселератора и частоте вращения, превышающей частоту вращения при холостом ходе, и/или при нажатой педали тормоза.
Также способ может предусматривать формирование предельного значения для положения педали акселератора и/или разности между фактическим и заданным значениями частоты вращения вала двигателя, при приближении к которому определяют выходную величину или выходной параметр, которая, соответственно который увеличивается по мере такого приближения и оказывает воздействие на поправочное значение, используемое для уменьшения максимально допустимого значения.
При уменьшении допустимых значений выходной величины используется однопараметровая характеристика зависимости от частоты вращения вала двигателя, которая задана таким образом, чтобы при достаточно интенсивном повышении частоты вращения допустимые значения выходной величины снижались до нуля включительно. Благодаря этому обеспечивается приемлемая реакция на ошибку и у быстро набирающих обороты двигателей.
Наиболее предпочтительно уменьшать допустимое значение выходной величины при нажатой педали тормоза, что облегчает торможение транспортного средства при возникновении сбоя или ошибки.
Для фильтрации допустимых значений выходной величины наиболее предпочтительно вводить время запаздывания, что позволяет учитывать характерное для впускного трубопровода системы впуска двигателя время запаздывания. В результате упрощается применение используемой постоянной фильтра, а также удается избежать наложения нежелательных ограничений на работу предусмотренной в некоторых случаях функции демпфирования дроссельной заслонки.
Помимо этого преимущество, связанное с инициализацией указанного фильтра при уменьшении степени нажатия на педаль акселератора, состоит в возможности более оперативной активизации ответных мер в качестве реакции на выявленную ошибку или сбой. Сказанное относится прежде всего к ошибке или сбою, при которых задаваемое водителем управляющее воздействие задается максимальным. Подобная ошибка или сбой могут привести к резкому увеличению частоты вращения вала двигателя вплоть до максимальной, однако более эффективная фильтрация допустимых значений позволяет снизить подобные возникающие при регулировании выбросы, при этом за счет инициализации фильтра при уменьшении степени нажатия на педаль акселератора удается существенно снизить склонность двигателя к возникновению переходных колебаний.
В третьем варианте предложенный способ заключается в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры. Отличие этого способа от рассмотренных выше известных решений состоит в том, что указанное максимальное значение определяют в зависимости от минимальной степени наполнения цилиндров и/или это максимальное значение определяют в зависимости от некоторого минимального значения, которое при наличии дополнительного запроса на увеличение крутящего момента формируют с использованием зависящего от температуры двигателя значения.
Особые преимущества достигаются при применении предлагаемого в изобретении решения в системах, в которых вычисления, связанные с формированием допустимых значений выходной величины, выполняются на двух программных уровнях, т.е. на 1-ми 2-м уровнях. При этом сплайны используются в процессе уменьшения допустимых значений выходной величины только на 1-м уровне, что позволяет существенно снизить затраты на прикладном уровне. Кроме того, инициализация фильтра по сигналу, характеризующему степень нажатия на педаль акселератора, позволяет существенно ускорить активизацию ответных мер в качестве реакции на выявленную ошибку или сбой именно на 1-м уровне, тогда как при возникновении такой ошибки или сбоя возникающие при регулировании на 2-м уровне выбросы снижаются.
Наиболее предпочтительно далее учитывать дополнительные запросы на повышение крутящего момента в период пуска холодного двигателя и непосредственно следующий за ним период, например при включении дополнительных потребителей или активизации управляющих функций. Благодаря этому удается повысить готовность двигателя к работе с одновременным увеличением точности контроля.
Другие преимущества изобретения рассмотрены в последующем описании вариантов его осуществления.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичное изображение блока управления силовым агрегатом транспортного средства,
на фиг.2 и 3 - функциональные схемы, иллюстрирующие предпочтительные методы определения максимально допустимого значения выходной величины силового агрегата, предпочтительно его крутящего момента,
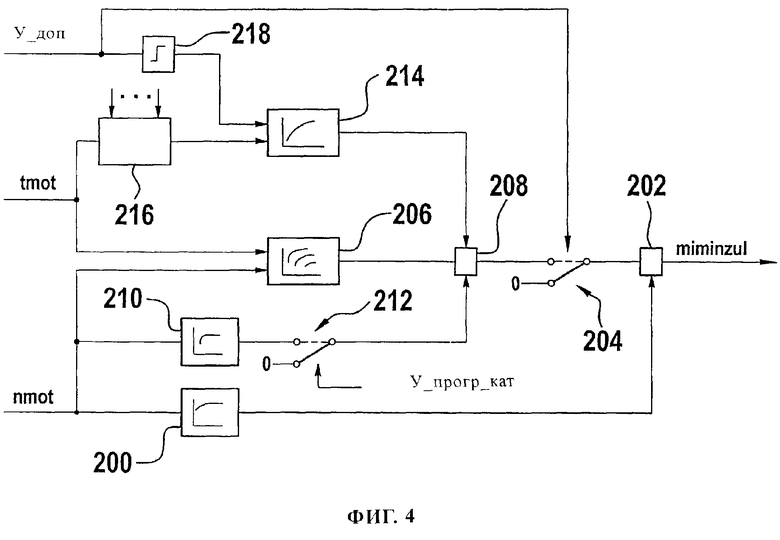
на фиг.4 - функциональная схема, поясняющая учет дополнительных запросов на повышение крутящего момента, поступающих в период пуска холодного двигателя, при вычислении минимально допустимого крутящего момента.
На фиг.1 условно показан блок 10 управления силовым агрегатом 12, имеющий по меньшей мере один процессор (вычислительное устройство) с памятью, в которой хранятся программы, предназначенные для управления силовым агрегатом 12. В процессе выполнения таких программ в процессор по входным линиям 14-18 от соответствующих измерительных устройств 20-24 поступают сигналы, которые характеризуют различные рабочие параметры силового агрегата и/или транспортного средства и которые обрабатываются процессором и учитываются при формировании по меньшей мере одного управляющего сигнала для силового агрегата 12. Подобные характеризующие рабочие параметры сигналы представляют собой, например, сигналы, характеризующие температуру двигателя, положение педали акселератора и иные параметры.
Поступающие в блок 10 управления входные величины преобразуются с помощью выполняемых процессором программ по меньшей мере в одно регулирующее или управляющее воздействие, которое выдается по меньшей мере в одну выходную линию 40 блока 10 управления и которое управляет по меньшей мере одним влияющим на режим работы силового агрегата 12 параметром в соответствии со значениями входных величин. В одном из предпочтительных вариантов на основании входных величин, которыми являются прежде всего положение педали акселератора и частота вращения вала двигателя, в качестве заданного значения выходной величины вычисляется заданное значение крутящего момента, которое затем преобразуется в управляющие сигналы, по которым регулируется положение дроссельной заслонки, угол опережения зажигания (момент зажигания) и/или дозирование топлива и иные влияющие на работу ДВС параметры, что позволяет изменять фактически развиваемый ДВС крутящий момент (т.е. его выходную величину) в сторону заданного значения.
Вместо управления крутящим моментом в другом варианте можно соответствующим образом управлять и иной выходной величиной силового агрегата, которой может служить развиваемая силовым агрегатом мощность, частота вращения вала его двигателя или иной параметр. Следует также отметить, что рассмотренный ниже подход можно использовать не только применительно к ДВС, но и применительно к иным типам приводных и силовых агрегатов, например применительно к электродвигателям.
Согласно одному из предпочтительных вариантов осуществления изобретения предусмотрено распределение выполняемых процессором программ по меньшей мере по двум уровням, к первому из которых относятся программы, которые выполняют управляющую функцию, а также описанную выше функцию по ограничению заданных значений, а ко второму уровню относятся контролирующие программы, которые также известны из рассмотренного выше уровня техники.
Для вычисления максимально допустимого значения выходной величины силового агрегата определяют максимально допустимое значение в функции частоты вращения вала двигателя. Минимальное значение определяют на основании вычисленных в зависимости от частоты вращения вала двигателя максимально допустимых значений выходной величины при отпущенной педали акселератора, корректируемых на поправочное значение, которое вводится в период пуска холодного двигателя и формируется в зависимости от температуры двигателя и частоты вращения его вала, либо на поправочное значение, которое вводится при активизированной функции прогрева каталитического нейтрализатора и которое также зависит от частоты вращения вала двигателя, и/или корректируемых с учетом допустимых значений, характеризующих затраты энергии или мощности, необходимой для работы дополнительных потребителей. Последние из вышеуказанных значений представляют собой максимально допустимые значения, характеризующие потребление мощности включенными дополнительными потребителями и/или необходимые для работы функции по стабилизации мощности. Эти значения добавляются к минимально допустимому значению выходной величины. Для вычисления максимально допустимого значения выходной величины, которое при контроле используется в операции сравнения, максимально допустимое значение, определенное по многопараметровой характеристике на основании положения педали акселератора и частоты вращения вала двигателя, взвешивается, предпочтительно интерполируется, в пределах между определенными описанным выше путем минимально и максимально допустимыми значениями.
Таким путем удается точно определить максимально допустимое значение выходной величины силового агрегата, которое используется при указанном в начале описания контроле. При этом описанный процесс происходит при формировании максимально допустимых значений и на 1-м уровне, и на 2-м уровне.
При возникновении ошибок или сбоев допустимые значения выходной величины задают более строго, т.е. уменьшают. При этом подобное уменьшение происходит не скачкообразно, а непрерывно и плавно с использованием так называемых сплайнов. Такие сплайны позволяют описать переходные процессы, и поэтому помимо двух конечных состояний существуют также промежуточные зоны. При этом сплайны первой степени соответствуют следующей общей формуле:
где переменная Х обозначает входную величину, переменная Y обозначает выходную величину, a ε обозначает область перехода.
Выходные сигналы нескольких сплайнов можно объединять между собой аналогично выполнению логических операций с битами. При этом умножение соответствует логической операции И (конъюнкции), а сложение соответствует логической операции ИЛИ (дизъюнкции).
Помимо сплайнов первой степени могут использоваться и сплайны более высокой степени, вычисление которых, однако, связано с увеличением затрат машинного времени. Ниже в качестве примера сплайна второй степени приведено следующее общее уравнение:
Сплайн второй степени позволяет обеспечить также непрерывность в первой производной. Тем самым удается дополнительно снизить риск возникновения переходных колебаний.
В рассматриваемом случае сплайны применяются с той целью, чтобы более строго контролировать допустимое значение в определенных режимах работы и уменьшать его. Подобный режим работы имеет место в том случае, если угол установки педали акселератора равен 0, т.е. педаль акселератора полностью отпущена и/или нажата педаль тормоза, если частота вращения вала двигателя превышает заданную частоту вращения при холостом ходе и/или если заданные для установки регулированием подачи воздуха в двигатель или момента зажигания значения крутящего момента превышают максимально допустимые значения.
Последнее условие предусмотрено только в предпочтительном варианте осуществления изобретения и в других вариантах может отсутствовать.
В результате логического объединения подобных условий с помощью сплайнов получают своего рода указатель ошибки или сбоя. Если одна из входных величин сплайнов приближается к ее границе, попадая в определяемую на прикладном уровне промежуточную зону, то при вычислении соответствующего сплайна получают значения в интервале от 0 до 1. В этом случае указатель ошибки или сбоя выдает отличные от 0 значения, если все условия по меньшей мере находятся в их промежуточных зонах. В зависимости от выдаваемого указателем ошибки или сбоя значения затем из допустимых выходных величин вычитается некоторое задаваемое на прикладном уровне значение. При наличии всех условий выдаваемое указателем ошибки или сбоя значение равно 1. В этом случае из допустимых значений вычитается наибольшая определенная на прикладном уровне величина, что позволяет более эффективно контролировать введение ответных мер в качестве реакции на возникшую ошибку или сбой.
При определении допустимых значений помимо фильтрации используется также время запаздывания, учитывающее характеристику впускного трубопровода силового агрегата. Инициализация фильтра и времени запаздывания происходит при уменьшении хода педали акселератора. Кроме того, при определении допустимого значения в соответствии с рассмотренной ниже методикой учитывается минимальная степень наполнения цилиндров ДВС.
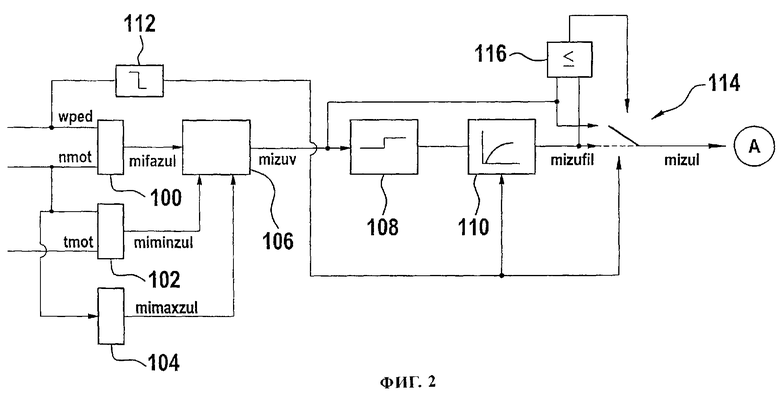
На фиг.2 и 3 представлены функциональные схемы, иллюстрирующие предпочтительную методику определения максимально допустимого значения выходной величины, которым предпочтительно является максимально допустимый крутящий момент. При этом отдельные блоки соответствуют отдельным программам, шагам или частям программ, а соединительные линии между этими блоками соответствуют потокам информации.
На основании входных величин, которыми являются положение педали акселератора wped и частота вращения вала двигателя nmot, с помощью первой многопараметровой характеристики 100 формируется значение максимально допустимого крутящего момента mifazul, который соответствует задаваемому водителем крутящему моменту. Помимо этого в зависимости от частоты вращения вала двигателя и от температуры двигателя tmot в блоке 102 формируется значение минимально допустимого крутящего момента miminzul, a в блоке 104, например на основании частоты вращения вала, формируется значение максимально допустимого крутящего момента mimaxzul.
Методика определения значений минимально и максимально допустимых крутящих моментов в принципе известна из рассмотренного в начале описания уровня техники. В предпочтительном варианте значение максимально допустимого крутящего момента формируется на основании меньшего значения, которое выбирается из максимально допустимого крутящего момента, определенного по однопараметровой характеристике в зависимости от частоты вращения, и из максимального крутящего момента, который двигатель фактически развил в прошлом.
При определении минимального крутящего момента к его значению в период пуска холодного двигателя добавляется соответствующая зависящая от температуры двигателя величина упреждения, при этом в зависимости от фактической температуры двигателя учитываются различные по величине компоненты, подвергнутые фильтрации с временной привязкой. Благодаря этому в период пуска холодного двигателя значение максимально допустимого крутящего момента несколько увеличивается, что в меньшей степени ограничивает готовность транспортного средства в этот период.
Затем в блоке 106 путем взвешивания значения максимально допустимого относительного крутящего момента mifazul, который соответствует задаваемому водителем крутящему моменту, в интервале между значениями минимально и максимально допустимых крутящих моментов формируется предварительное значение максимально допустимого крутящего момента mizuv. Это предварительное значение максимально допустимого крутящего момента mizuv поступает далее в звено 108 запаздывания. При этом время запаздывания согласовано со временем запаздывания системы впускного трубопровода ДВС или соответствует этому времени запаздывания. После звена запаздывания это предварительное значение допустимого крутящего момента поступает в фильтр 110 нижних частот, где оно подвергается фильтрации. Выходным сигналом этого фильтра является полученное в результате фильтрации значение максимально допустимого крутящего момента mizufil. Инициализация фильтра происходит в тот момент, когда зарегистрировано отпускание педали акселератора. Подобная инициализация осуществляется с помощью соответствующего порогового переключателя 112, в который поступает сигнал wped, характеризующий степень нажатия на педаль акселератора. Этот пороговый переключатель выдает выходной сигнал при отпускании педали акселератора, т.е., например, в тот момент, когда уровень сигнала wped становится ниже некоторого порогового значения. При наличии этого выходного сигнала порогового переключателя, во-первых, происходит инициализация фильтра 110 по предварительному максимально допустимому значению крутящего момента и, во-вторых, происходит переключение переключательного элемента 114 в показанное прерывистой линией положение. В этом положении переключательного элемента на дальнейшую обработку выдается полученное в результате фильтрации значение максимально допустимого крутящего момента. Помимо этого инициализация фильтра 110 происходит и при наличии запросов на увеличение крутящего момента от внешних систем, например при поступлении таких запросов от регулятора развиваемого двигателем тягового момента, от противобуксовочной системы и иных систем и регуляторов. В этом случае вторым параметром, на основании которого происходит инициализация, является не отпускание педали акселератора, а отсутствие предварительного значения максимально допустимого крутящего момента mizuv. Полученное в результате фильтрации значение максимально допустимого крутящего момента mizufil сравнивается далее в элементе 116 сравнения с не подвергнутым фильтрации значением крутящего момента mizuv. Если не подвергнутое фильтрации значение меньше полученного в результате фильтрации значения, то по выходному сигналу элемента 116 сравнения переключательный элемент 114 переключается в показанное сплошной линией положение. При этом вместо полученного в результате фильтрации значения максимально допустимого крутящего момента на дальнейшую обработку выдается его не подвергнутое фильтрации значение.
Соответствующим образом по предварительному значению максимально допустимого крутящего момента происходит и инициализация звена 108 запаздывания.
Таким образом, на дальнейшую обработку, если не было зарегистрировано отпускание педали акселератора, выдается, как правило, не подвергнутое фильтрации значение максимально допустимого крутящего момента. В противном случае значение максимально допустимого крутящего момента подвергается фильтрации, поскольку отпускание педали акселератора сказывается на изменении крутящего момента лишь с некоторой задержкой по истечении определенного времени запаздывания. Во избежание слишком резкого снижения максимально допустимого крутящего момента и тем самым слишком быстрой реакции на ошибку на дальнейшую обработку выдается подвергнутое фильтрации в звене 108 запаздывания и фильтре 110 значение максимально допустимого крутящего момента, при этом при инициализации этих звена задержки и фильтра за исходное значение принимается не подвергнутое фильтрации значение максимально допустимого крутящего момента. Как только полученное в результате фильтрации значение максимально допустимого крутящего момента станет меньше его не подвергнутого фильтрации значения, на дальнейшую обработку вновь начнет выдаваться это не подвергнутое фильтрации значение.
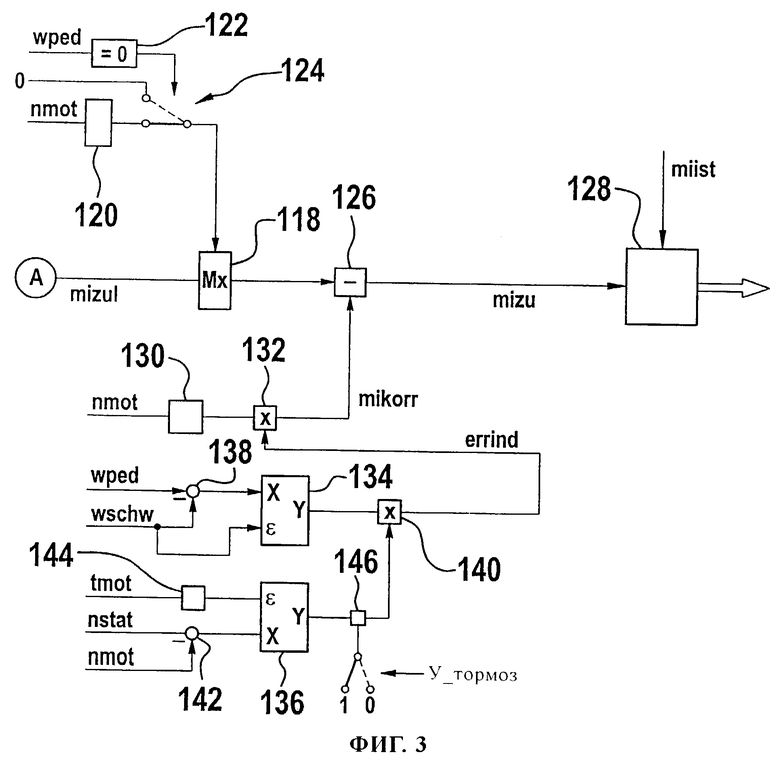
Дальнейшая обработка сформированного описанным выше образом значения допустимого крутящего момента mizul происходит в соответствии с показанной на фиг.3 схемой. В соответствии с этой показанной на фиг.3 схемой значение максимально допустимого крутящего момента непрерывно уменьшается при наличии определенных режимов работы, при этом используются описанные выше сплайны. Однако сначала значение максимально допустимого крутящего момента подается в каскад 118 выбора максимального значения, в котором зависящее от частоты вращения вала двигателя значение nmot, формируемое с помощью однопараметровой характеристики 120 и характеризующее минимальную степень наполнения воздухом цилиндров ДВС, сравнивается с этим значением максимально допустимого крутящего момента и который выдает на дальнейшую обработку наибольшее из этих двух значений. При отпущенной педали акселератора, т.е. при нахождении этой педали в положении, равном 0, генератором 122 сигналов выдается сигнал, по которому переключательный элемент 124 переключается в показанное пунктирной линией положение и по которому на вход каскада 118 выбора максимального значения подается значение, равное 0. Ограниченное при необходимости таким путем значение максимально допустимого крутящего момента подается затем в дифференциатор 126, в котором в соответствующих режимах работы вычитается непрерывно изменяющееся значение и в котором таким путем уменьшается значение максимально допустимого крутящего момента. Выходным сигналом дифференциатора 126 является значение максимально допустимого крутящего момента mizu, которое в блоке 128 сравнения сравнивается с фактическим значением крутящего момента miist, при этом при превышении фактическим крутящим моментом максимально допустимого крутящего момента активизируются ответные меры в качестве реакции на выявленную ошибку, например ограничивается заданное значение крутящего момента, отключается подача топлива и т.д.
Для определения коэффициента уменьшения, учитываемого в дифференциаторе 126, используются описанные выше сплайны. На фиг.3 проиллюстрирован предпочтительный вариант, согласно которому уменьшение максимально допустимого крутящего момента происходит при отпущенной педали акселератора (угловое положение wped педали акселератора равно 0) или при нажатой педали тормоза, соответственно при превышении частотой вращения nmot заданной установившейся частоты вращения. Помимо этого согласно еще одному варианту заданные значения крутящего момента, на которые должен установиться фактический крутящий момент за счет регулирования подачи воздуха и момента зажигания соответственно, сравниваются с заданными предельными значениями, при этом значение максимально допустимого крутящего момента также уменьшается, если одно из этих двух заданных значений крутящего момента превышает допустимое значение. При использовании же сплайнов для заданных значений крутящего момента учитываются дополнительные критерии. С помощью однопараметровой характеристики 130 в зависимости от частоты вращения вала двигателя формируется поправочный коэффициент для максимально допустимого крутящего момента, который в умножителе 132 умножается на некоторое значение, лежащее в интервале от 0 до 1. Взвешенное таким путем поправочное значение mikorr подается в дифференциатор 126. На фиг.3 показаны также две сплайн-функции 134 и 136, которые работают в соответствии с приведенными выше формулами для сплайна первой степени, а в другом варианте - второй степени. Входная величина для сплайн-функции 134 формируется на основании разности между величиной, характеризующей положение педали акселератора wped, и пороговым значением wschw хода педали акселератора, которое отделяет диапазон хода отпущенной педали акселератора от диапазона хода нажатой педали акселератора. Эта разность определяется в дифференциаторе 138. Значению ε соответствует пороговое значение wschw. Выходная величина Y сплайн-функции 134 перемножается в умножителе 140 с выходным значением сплайн-функции 136. Подобное перемножение представляет собой, как указывалось выше, логическую операцию И. Выходной величиной умножителя 140 является величина ошибки errind, которая принимает значения от 0 до 1. При этом все значения, превышающие 1, ограничиваются единицей. Входной величиной второй показанной на чертеже сплайн-функции 136 является определяемая в дифференциаторе 142 разность между частотой вращения nmot вала двигателя и установившейся частотой вращения при холостом ходе nstat. Значение ε определяется в соответствии с однопараметровой характеристикой 144 в зависимости от температуры двигателя tmot. При нажатой педали тормоза (т.е. при наличии условия У_тормоз, указывающего на нажатую педаль тормоза) к выходной величине Y сплайн-функции 136 в сумматоре 146 добавляется значение, равное 1, а при не нажатой педали тормоза добавляется значение, равное 0. Выходное значение сумматора 146 поступает затем в умножитель 140.
Таким образом, в соответствии с рассмотренным выше подходом при использовании сплайнов в том случае, когда их входная величина попадает в промежуточную зону ε, формируется значение в интервале от 0 до 1, при этом выходная величина сплайнов принимает значение, равное 0, если входные величины сплайнов лежат ниже промежуточной зоны, и принимают значение, равное 1, если они лежат выше этой промежуточной зоны. Если указанное значение отклоняется от 0, то в умножителе 132 значение максимально допустимого крутящего момента умножается на зависящее от частоты вращения вала двигателя поправочное значение, представляющее собой весовой коэффициент, величина которого определяется с учетом того, насколько далеко входные величины "заходят" в промежуточную зону, при этом в конце этой промежуточной зоны по достижении порогового значения выходная величина принимает значение, равное 1. Тем самым по мере приближения к описанным выше режимам работы значение максимально допустимого крутящего момента непрерывно уменьшается.
На фиг.4 показана функциональная схема, иллюстрирующая процесс определения минимально допустимого крутящего момента, при этом учитывается наличие или отсутствие особых условий, которыми в данном случае являются пуск холодного двигателя и дополнительные запросы на увеличение крутящего момента в этом режиме работы. Значение минимально допустимого крутящего момента miminzul задается по однопараметровой характеристике 200 в функции частоты вращения вала двигателя nmot. Это значение при наличии определенных заданных условий объединяется (предпочтительно суммируется) в комбинационном блоке 202 с некоторым отличным от нуля значением. Информация о наличии подобных дополнительных условий содержится в переключающем сигнале У_доп, который имеет положительное значение при наличии дополнительных запросов на увеличение крутящего момента, поступающих, например, от дополнительных потребителей, таких как вакуумные насосы, кондиционеры, вентиляторы, фары, генератор и иное оборудование, при работе которых возрастает потребление энергии и, как следствие, необходимо дополнительно увеличить крутящий момент, и/или от дополнительных функций, таких как функция прогрева каталитического нейтрализатора, при активизации которых также требуется увеличить развиваемый силовым агрегатом крутящий момент. Предпочтительно, чтобы такой переключающий сигнал У_доп принимал положительное значение только в том случае, когда подобное дополнительное увеличение крутящего момента требуется в период пуска холодного двигателя, соответственно в непосредственно следующий за ним период. По этому переключающему сигналу, когда он имеет положительное значение, переключательный элемент 204 переключается в показанное прерывистой линией положение. В этом режиме работы зависящее от частоты вращения значение объединяется в комбинационном элементе 202 со сформированным в зависимости от частоты вращения вала двигателя и его температуры значением. Это значение определяется, например, по многопараметровой характеристике 206 в зависимости от частоты вращения вала двигателя nmot и от его температуры tmot. В этом значении учитываются дополнительные потери, возникающие при работе непрогретого двигателя и обусловленные, например, повышенным трением в этот период. При наличии дополнительных запросов на увеличение крутящего момента это значение объединяется (предпочтительно суммируется) в комбинационном элементе 208 со значениями, учитывающими подобные дополнительные запросы на повышение крутящего момента. Так, в частности, при включенной функции прогрева каталитического нейтрализатора (т.е. при наличии условия У_прогр_кат) в комбинационный элемент 208 поступает дополнительное значение, зависящее от частоты вращения вала двигателя. Это значение определяется, например, по однопараметровой характеристике 210 в функции частоты вращения вала двигателя nmot и подается в комбинационный элемент 208 в том случае, когда переключательный элемент 212 при наличии указанного условия находится в положении, показанном прерывистой линией.
Другое подаваемое в комбинационный элемент 208 значение формируется в фильтре 214. Этот фильтр предпочтительно представляет собой фильтр нижних частот, в котором фильтрации подвергается зависящее от температуры двигателя значение, сформированное в блоке 216. В этот блок 216 поступает значение, которое характеризует температуру двигателя tmot и которое соотносится с некоторым постоянным значением температуры TNS, необязательно с умножением на весовые коэффициенты, определяемые иными заданными величинами. При этом такое значение температуры представляет собой некоторое предельное значение, отграничивающее режим работы в период пуска холодного двигателя от других режимов. В предпочтительном варианте поступающий на вход фильтра сигнал dm_доп формируется следующим образом:
dm_доп=(TNS-tmot)×dmzul/Δmns,
где dmzul и Δmns являются постоянными заданными весовыми величинами.
Фильтр нижних частот выполнен таким образом, чтобы фильтрация происходила только при поступлении положительного фронта переключающего сигнала У_доп, несущего информацию о наличии дополнительных условий (см. блок 218), т.е. только при поступлении нового запроса на повышение крутящего момента. Установленное на этот момент времени значение dm_доп подвергается фильтрации с использованием определенной постоянной времени, при этом любые изменения этого значения, происходящие после указанного момента времени, не учитываются. Таким образом, полученное в результате фильтрации значение dm_доп представляет собой зависящую от температуры двигателя компоненту, подвергнутую фильтрации с временной привязкой (величину упреждения в период пуска холодного двигателя).
Рассмотренный выше процесс определения минимально допустимого крутящего момента происходит и на 1-м уровне, и на 2-м уровне.
Рассмотренные в приведенном выше описании меры по учету сплайнов, фильтрации максимально допустимого значения, формированию величины упреждения для периода пуска холодного двигателя при минимально допустимом крутящем моменте, а также по учету минимальной степени наполнения цилиндров могут использоваться в зависимости от конкретного варианта осуществления изобретения либо по отдельности, либо в любом их сочетании.
Изобретение относится к двигателестроению, в частности способам управления силовым агрегатом. Изобретение позволяет обеспечить получение оптимальных результатов при управлении силовым агрегатом. Способ управления силовым агрегатом заключатся в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры. При этом максимально допустимое значение формируют в зависимости от положения педали акселератора и, по меньшей мере, в одном режиме работы подвергают фильтрации с учетом динамических характеристик впускного трубопровода двигателя внутреннего сгорания (ДВС). При фильтрации используют звено запаздывания, позволяющее учитывать характерное для впускного трубопровода время запаздывания. Второй способ управления силовым агрегатом заключатся в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры. Максимально допустимое значение непрерывно уменьшают в зависимости от удаления по меньшей одной характеризующей определенный режим работы величины от предельного значения. Третий способ управления силовым агрегатом заключатся в том, что задают максимальное значение выходной величины или выходного параметра этого силового агрегата и при превышении фактическим значением этого максимального значения активизируют соответствующие ответные меры. Указанное максимальное значение определяют в зависимости от минимальной степени наполнения цилиндров и/или это максимальное значение определяют в зависимости от некоторого минимального значения, которое при наличии дополнительного запроса на увеличение крутящего момента формируют с использованием зависящего от температуры двигателя значения. 3 н. и 5 з.п. ф-лы, 4 ил.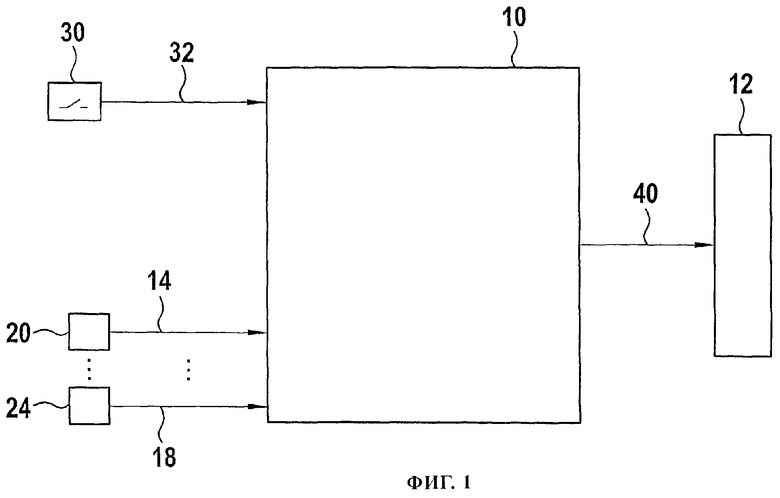
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ управления подачей топлива в двигатель внутреннего сгорания с индивидуальной для каждого цилиндра регулировкой подачи топлива | 1989 |
|
SU1778341A1 |
| RU 2058495 C1, 20.04.1996 | |||
| DE 19814743 A1, 07.10.1999 | |||
| US 5215062 А, 01.06.1993 | |||
| US 5080073 А, 14.01.1992. | |||

