Изобретение относится к области машиностроения, в частности к оборудованию для шлифования полов, преимущественно из твердых материалов - бетона, камня и т.п.
Известна полипланетарная машина, содержащая корпус с ходовыми колесами, смонтированный в корпусе привод с редуктором, имеющим входной вал, связанный с приводным двигателем, и планетарные диски, на которых смонтированы шлифовальные головки, несущие абразивные элементы, обращенные в сторону обрабатываемой поверхности (SU №916254, В 24 В 7/22, 1980).
Недостатками данной машины являются ее конструктивная сложность, обусловленная сложностью соосных планетарных механизмов, недостаточные надежность и долговечность, обусловленные воздействием каменной пыли на передаточный механизм, сложность замены планетарных дисков с абразивным инструментом, сложность управления машиной, подвергающейся случайным броскам, обусловленным случайной величиной крутящего момента. На неровных полах машину бросает из стороны в сторону, что может привести к повреждению машины и окружающих предметов, а также к травмам оператора.
Известна также полипланетарная двухвальная машина, содержащая передвижной корпус, смонтированный на нем редуктор, имеющий приводной входной вал, два параллельных выходных вала, и два расположенных в одной плоскости планетарных диска в виде планшайб с абразивными инструментами, обращенными в сторону обрабатываемой поверхности (RU №2183155, В 24 В 7/22, 2002).
Недостатками данной машины являются низкое качество (шероховатость) получаемой поверхности из-за узости диапазона скоростей и малой сложности траектории абразивного инструмента, недостаточные производительность, надежность и долговечность, обусловленные значительным воздействием каменной пыли на вращающийся механизм, сложность замены дисков с абразивным инструментом.
При работе машины остаются кольцевые следы (царапины) на обрабатываемой поверхности. Это значит, что даже при использовании тонких абразивов эта машина не может быть использована для качественного лощения и полировки поверхностей.
По этой причине все аналогичные машины позиционируются как машины для шлифовки бетона, для подготовки подосновы пола для последующих покрытий.
Технической задачей изобретения является создание эффективной машины для шлифовки, лощения и полировки полов, а также расширение арсенала указанных машин, в том числе и путем дооборудования существующих машин, прежде всего российских и производства стран СНГ.
Технический результат, обеспечивающий решение поставленной задачи, состоит в том, что повышена производительность обработки поверхности и исключено образование кольцевых царапин, т.е. обеспечено высокое качество обрабатываемой поверхности за счет усложнения траектории и расширения диапазона скоростей абразивных инструментов, исключено засорение передаточного механизма благодаря наличию последовательной двухступенчатой защиты от каменной пыли, упрощена сборка/разборка с помощью байонетного соединения с одновременным обеспечением оперативной взаимозаменяемости одного или нескольких планетарных дисков совместно с установленными на нем сателлитами, облегчено управление работающей машиной за счет снижения усилий, вырывающих машину из рук на неровностях обрабатываемой поверхности.
Сущность изобретения состоит в том, что полипланетарная машина для шлифовки, лощения и полировки полов содержит двигатель, редуктор и, по меньшей мере, два рабочих органа в виде планетарных дисков, охваченных общим корпусом и установленных на валах, связанных с валами редуктора с возможностью вращения в противоположных направлениях, и равномерно распределенные по периферии каждого из дисков, по меньшей мере, три держателя абразивных инструментов, соединенных с сателлитами, связанными передаточным механизмом между собой и с планетарным диском с возможностью одновременного вращения каждого сателлита вокруг собственной оси и вокруг оси планетарного диска, каждый из которых выполнен быстросъемным и снабжен отдельным корпусом, охватывающим планетарный диск с его передаточным механизмом и зафиксированным от вращения относительно общего корпуса, при этом вал каждого из планетарных дисков и валы редуктора снабжены элементами сборно-разборных байонетных соединений, собранных внутри общего корпуса вне корпуса планетарного диска.
В частных случаях исполнения машины редуктор выполнен с возможностью синхронного вращения валов планетарных дисков, каждый из сателлитов установлен с возможностью вращения в одном направлении с планетарным диском, на котором он установлен, или каждый из сателлитов установлен с возможностью вращения в направлении, противоположном направлению вращения планетарного диска, на котором он установлен, кроме того, каждый из сателлитов предпочтительно установлен с возможностью вращения по траектории, пересекающей траекторию сателлита, установленного на другом диске, а передаточный механизм выполнен с возможностью синхронизации вращения сателлитов соседних дисков.
Передаточный механизм каждого планетарного диска может быть выполнен в виде зубчатой передачи с зубчатым колесом, установленным соосно валу планетарного диска, и с зубчатыми колесами сателлитов, закрепленными на осях последних, либо в виде ременной передачи с центральным шкивом, установленным соосно валу планетарного диска, и со шкивами сателлитов, закрепленными на осях последних.
Передаточный механизм в виде ременной передачи может быть выполнен с двухсторонним ремнем, опертым на шкивы всех сателлитов одного диска, или с односторонним ремнем, или с клиновым ремнем, или с зубчатым ремнем.
Центральный шкив ременной передачи предпочтительно неподвижно закреплен в корпусе планетарного диска.
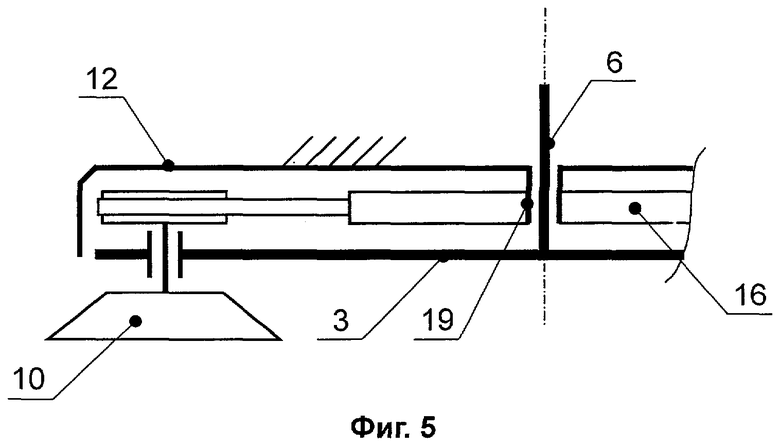
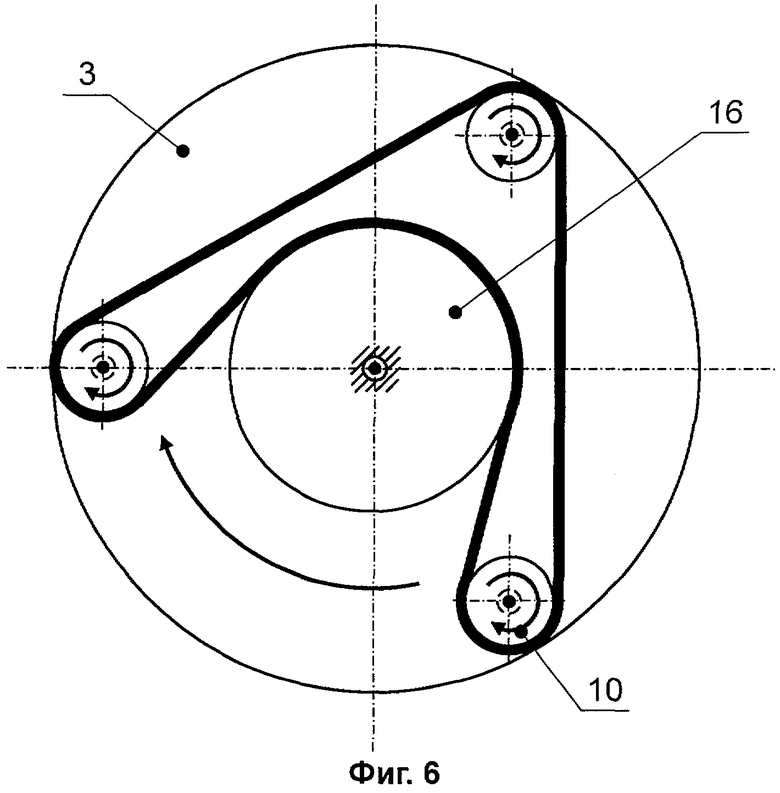
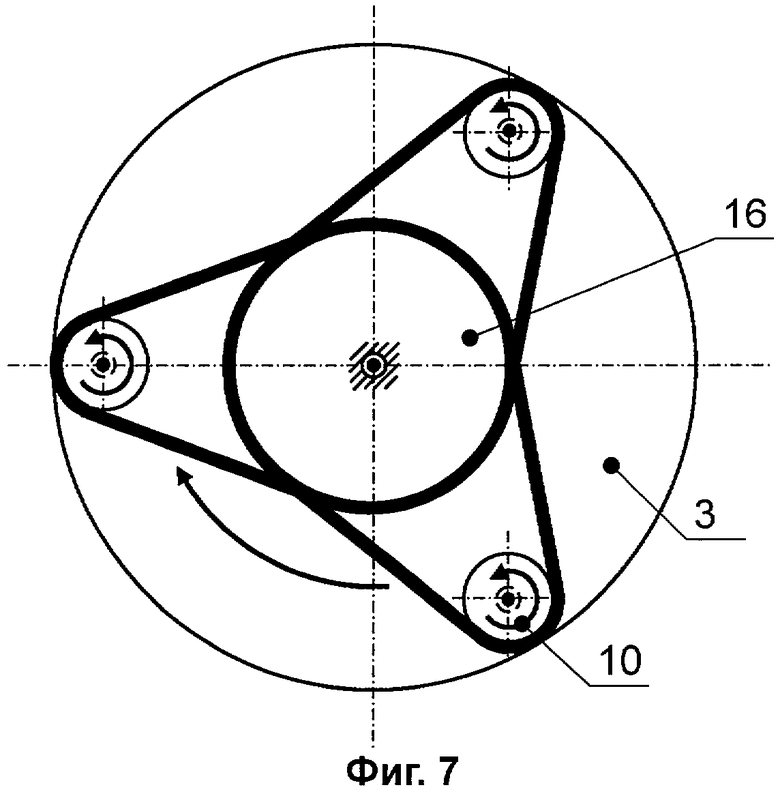
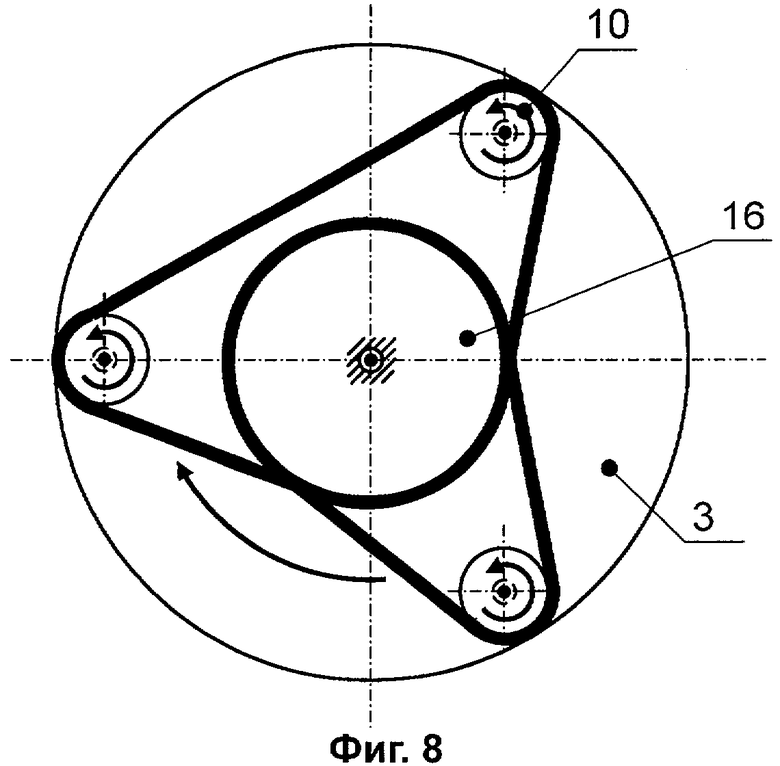
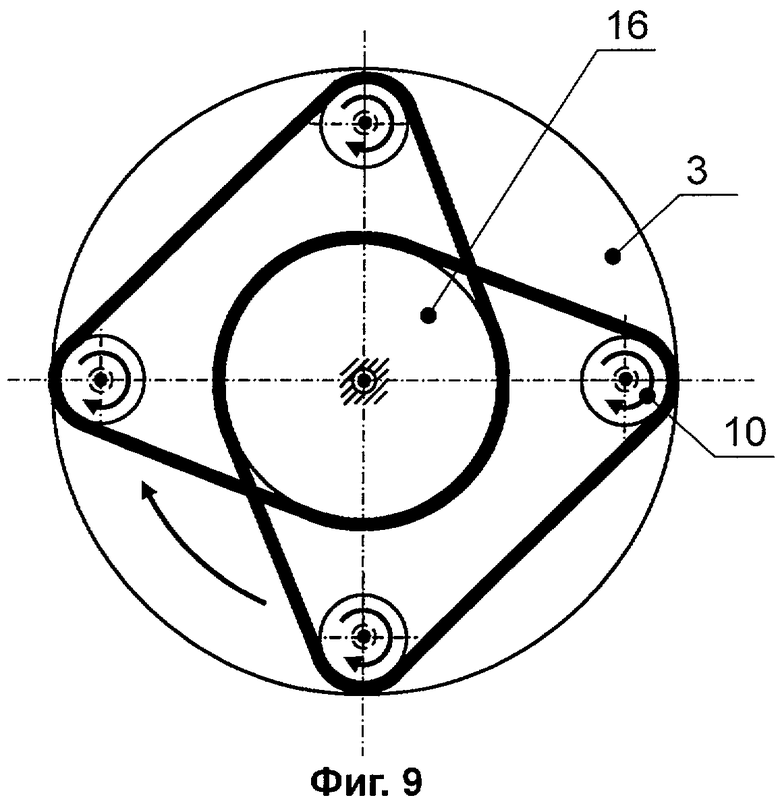
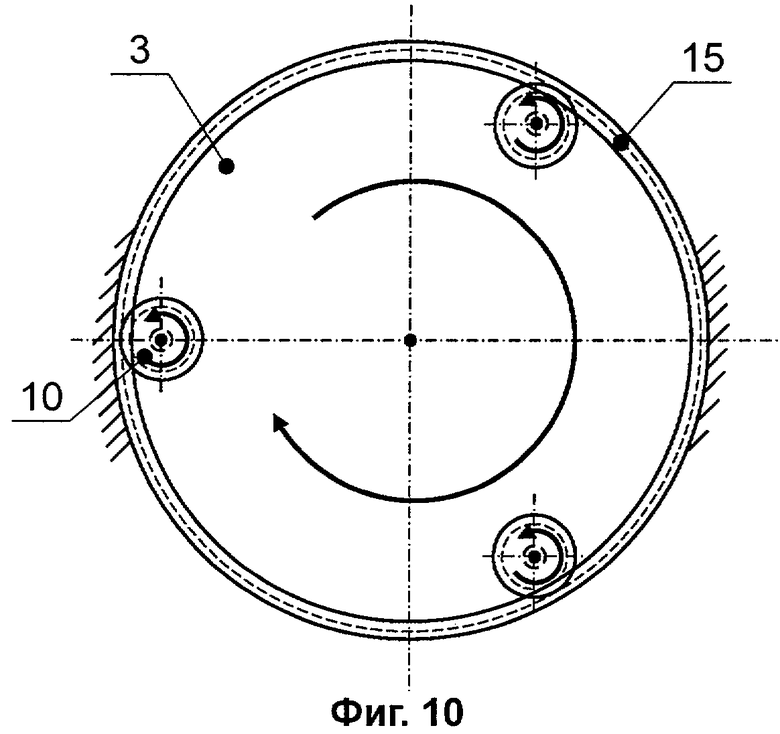
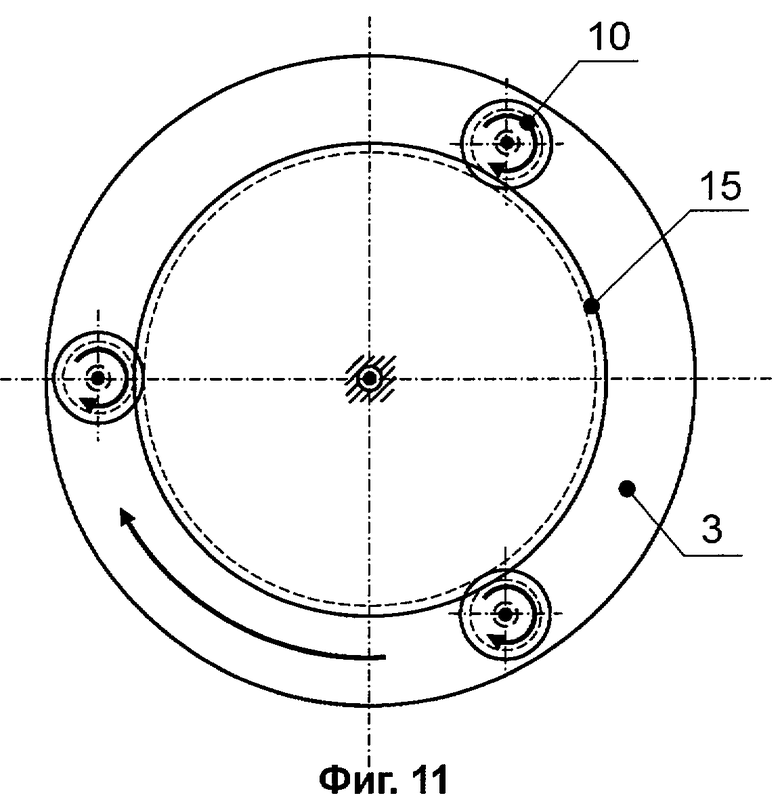
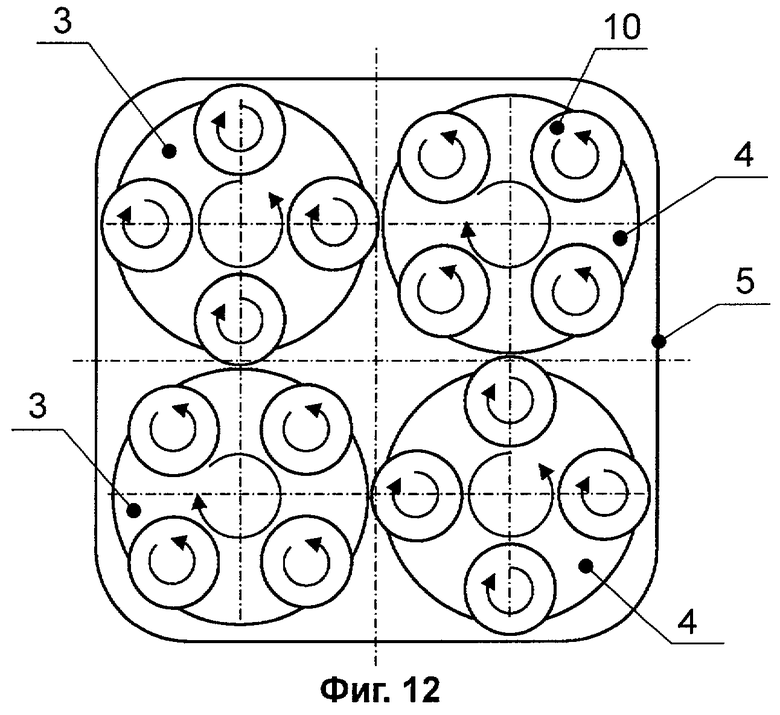
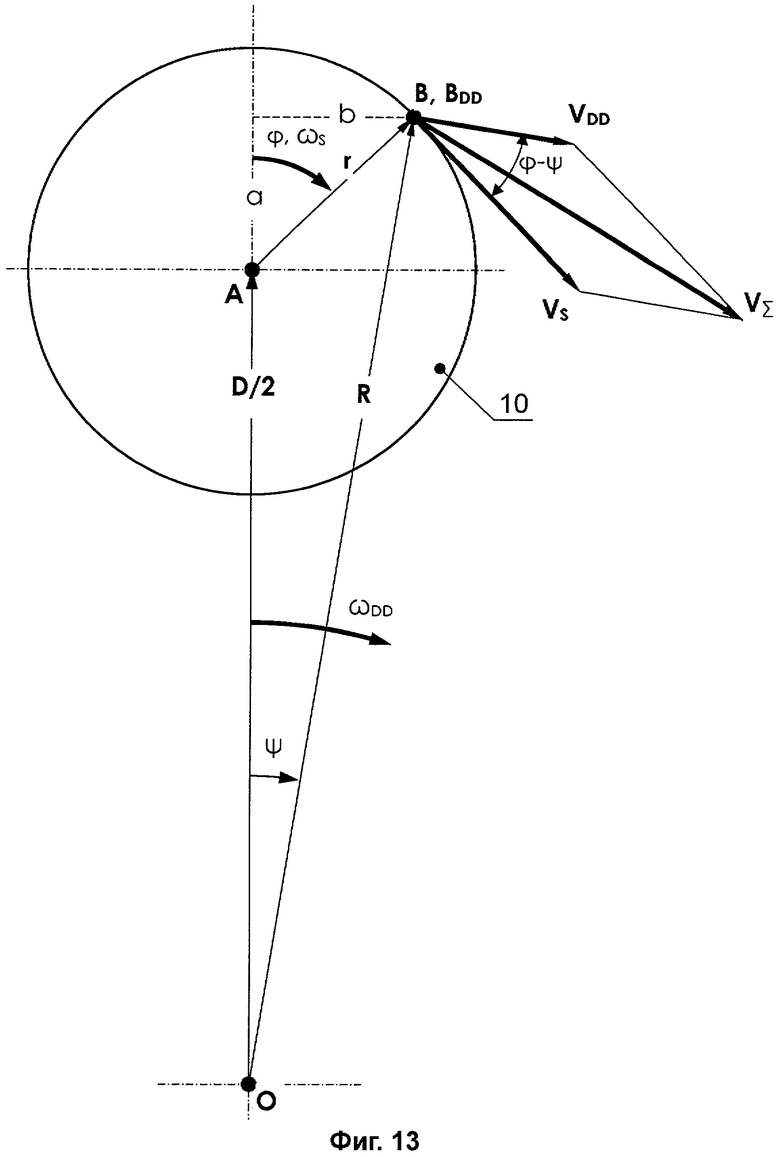
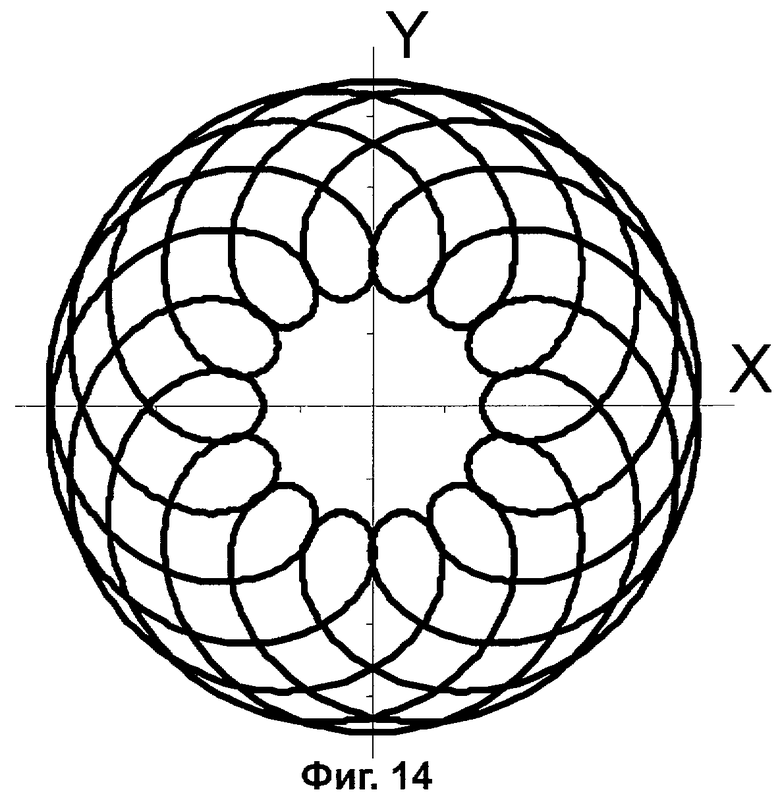
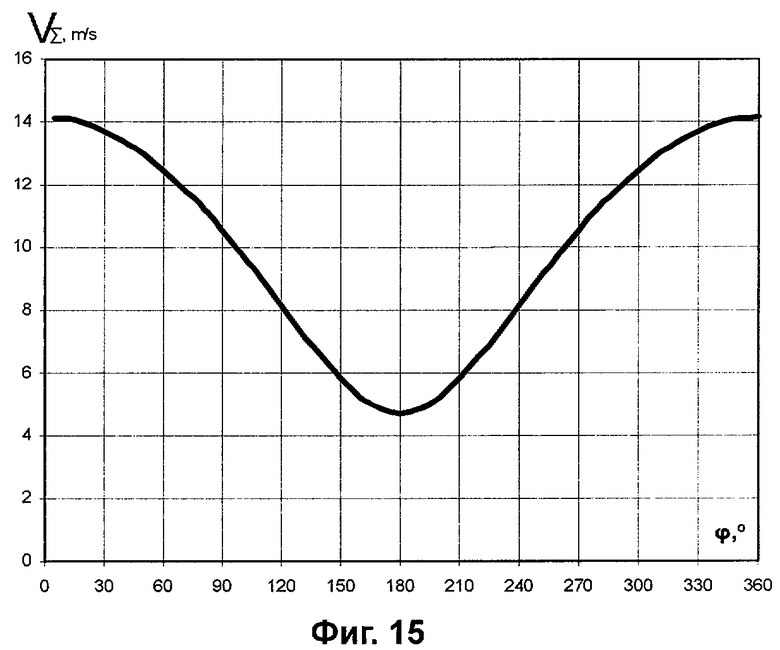
На фиг.1 изображена конструктивная схема расположения планетарных дисков и байонетного соединения, на фиг.2 - вид снизу на два планетарных диска, на фиг.3 - схема редуктора, на фиг.4 - разрез через вал планетарного диска и передаточный механизм с тремя зубчатыми ремнями, на фиг.5 - разрез через вал планетарного диска и передаточный механизм с одним двухсторонним ремнем, на фиг.6-8 - схемы выполнения ременной передачи передаточного механизма с тремя сателлитами и с одним двухсторонним, тремя, двумя односторонними ремнями, соответственно, на фиг.9 - схема выполнения ременной передачи передаточного механизма с четырьмя сателлитами и с двумя ремнями, на фиг.10, 11 - схемы выполнения зубчатой передачи передаточного механизма, на фиг.12 - вид снизу на четыре планетарных диска, фиг.13 - расчетная схема скорости точки на сателлите и абразивном инструменте, на фиг.14 - траектория точки на сателлите и абразивном инструменте, на фиг.15 - график изменения скорости точки на сателлите и абразивном инструменте за один оборот сателлита.
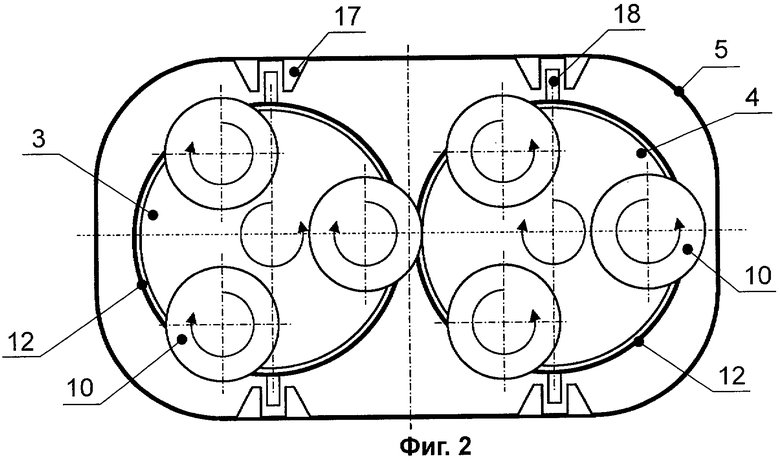
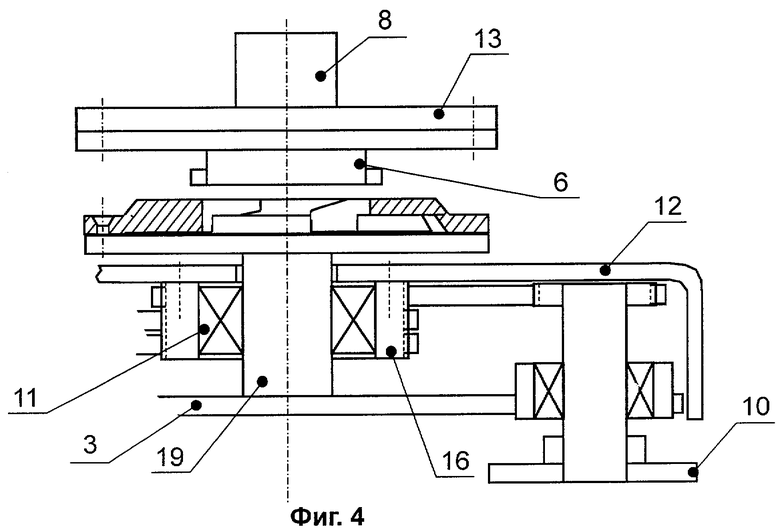
Машина для шлифовки, лощения и полировки полов содержит двигатель 1, редуктор 2 и рабочие органы в виде планетарных дисков 3, 4, охваченных общим корпусом 5 и установленных на валах 6, 7, связанных с выходными валами 8, 9 редуктора 2 с возможностью вращения в противоположных направлениях. Количество дисков 3, 4 должно быть не менее двух, например фиг.12 - четыре. По периферии каждого из дисков 3, 4, равномерно распределены, по меньшей мере, три держателя абразивных инструментов (не обозначены), соединенных с сателлитами 10, связанными передаточным механизмом 11 между собой и с планетарным диском 3(4) с возможностью одновременного вращения каждого сателлита 10 вокруг собственной оси и вокруг оси планетарного диска 3(4). Каждый из последних выполнен быстросъемным и снабжен отдельным корпусом 12, охватывающим планетарный диск 3(4) с его передаточным механизмом 11 и зафиксированным от вращения относительно общего корпуса 5. Количество сателлитов 10 должно быть не менее трех, например по фиг.9 и фиг.12 - четыре. Валы 6, 7 планетарных дисков 3, 4 и валы 8, 9 редуктора 2 снабжены ответными друг другу, т.е. стыкуемыми при соединении элементами быстро сборно-разборных байонетных соединений 13, 14, собранных внутри корпуса 5 вне (снаружи) корпуса 12 планетарного диска 3(4), т.е. в пространстве между корпусами 5 и 12.
В частных случаях исполнения машины редуктор 2 выполнен с возможностью синхронного вращения валов 6, 7 планетарных дисков 3, 4. Каждый из сателлитов 10 может быть установлен на оси (не обозначена) с возможностью вращения в одном направлении с планетарным диском 3 или 4, на котором он установлен, или каждый из сателлитов 10 может быть установлен с возможностью вращения в направлении, противоположном направлению вращения планетарного диска 3 или 4, на котором он установлен. Каждый из сателлитов 10 предпочтительно установлен с возможностью вращения по траектории, пересекающей траекторию сателлита 10, установленного на другом диске 4 или 3, а передаточный механизм 11 выполнен с возможностью синхронизации вращения сателлитов 10 соседних дисков 3, 4.
Передаточный механизм 11 каждого планетарного диска 3, 4 может быть выполнен в виде зубчатой передачи с зубчатым колесом, например венцом 15, закрепленным в корпусе 12, и с зубчатыми колесами (не обозначены) сателлитов 10, закрепленными на осях последних, либо в виде ременной передачи с центральным шкивом 16, установленным соосно валу 6(7) планетарного диска 3(4), и со шкивами (не обозначены) сателлитов 10, закрепленными на осях последних.
Передаточный механизм 11 в виде ременной передачи может быть выполнен с двухсторонним ремнем, опертым на шкивы всех сателлитов 10 одного диска 3(4), или с односторонним ремнем, или с клиновым ремнем, или с зубчатым ремнем.
Центральный шкив 16 ременной передачи предпочтительно неподвижно закреплен в корпусе 12 планетарного диска 3(4).
Корпус 12 планетарного диска зафиксирован от вращения выступами 17 и упорами 18 общего корпуса 5, на который передаются нагрузки от передаточного механизма 11. Сателлиты 10 установлены в подшипниковых узлах. Центральный шкив 16 или шестерня 15 может быть установлена на подшипниках (не обозначены) с возможностью вращения или может быть жестко закреплена в корпусе 12 планетарного диска 3(4), имеющем соответствующую центральную втулку 19 (которая может быть выполнена заодно или крепиться на верхнюю часть корпуса 12).
В качестве ременной передачи могут использоваться двухсторонние или односторонние, клиновые (шестигранные) или зубчатые ремни, в этих случаях используются клиновые или зубчатые шкивы (конструкции ремней не изображены).
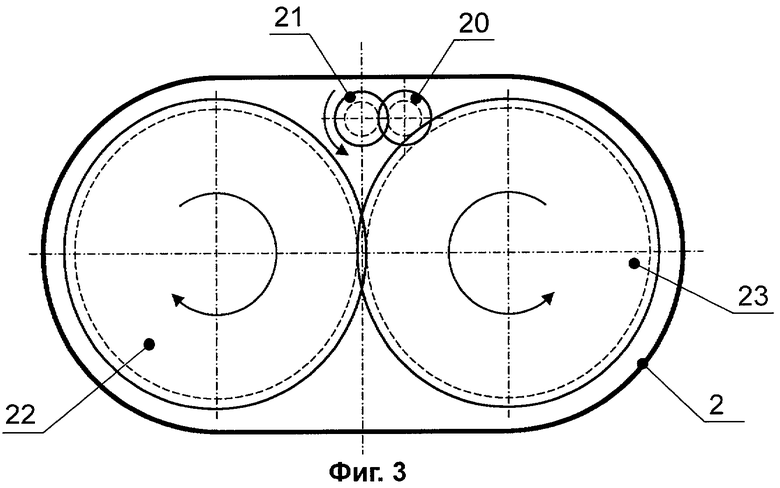
Редуктор 2 состоит из ведущей шестерни 20, закрепленной на валу приводного двигателя 1 (электродвигателя), промежуточной шестерни 21 и двух ведомых зубчатых колес 22, 23 с одинаковым количеством зубьев, соединенных с выходными валами 8, 9 редуктора 2. Машина перемещается на ходовых колесах (не изображены).
Машина работает следующим образом.
Оператор подводит машину, удерживая ее за рукоятки и перемещая на ходовых колесах к подлежащей шлифованию каменной поверхности пола. Каменные полы составлены из мраморных, гранитных и т.п. плит, а также выполнены из бетона или тераццовые. Тераццовыми полами называются полы, состоящие из смеси цемента и мраморной крошки, шлифованные до вскрытия мраморного заполнителя. Под бетонными полами имеются в виду в том числе и полы, содержащие мелкие (песок) и крупные (щебень) заполнители различной природы. Тераццовые полы можно рассматривать в качестве частного случая бетонных. Оператор опускает машину на обрабатываемую поверхность. В таком положении абразивные инструменты - шлифовальные головки располагаются на обрабатываемой поверхности, а машина своим весом их придавливает к этой поверхности. После включения приводного двигателя 1 вращение передается через валы 8, 9 редуктора 2, вращающиеся в разных направлениях, и байонетные соединения 13, 14 валам 6, 7 планетарных дисков 3, 4 и сателлитам 10 с абразивным инструментом. Передаточные механизмы 11 планетарных дисков 3, 4 преобразуют вращение валов 8, 9 редуктора 2 во вращение сателлитов 10 вокруг оси планетарных дисков 3, 4 и сателлитов 10 вокруг их собственных осей. Сателлиты 10 синхронно вращаются навстречу друг другу или в противоположные стороны в зависимости от направления вращения двигателя 1 и варианта выполнения редуктора 2 и передаточного механизма 11. Абразивные инструменты производят обработку поверхностей, перемещаясь по сложной петлеобразной траектории с переменной скоростью точек, что позволяет неоднократно с переменными усилием, направлением и скоростью воздействовать на каждую точку обрабатываемой поверхности для наиболее эффективного удаления шероховатостей.
Для механизма 11 с ременной или зубчатой передачей уравнение относительного вращения сателлита 10 следующее:

где ωs - угловая скорость сателлита 10 относительно диска 3(4),
ωмр - угловая скорость центрального шкива 16 или зубчатого колеса, или зубчатого венца,
ωDD - угловая скорость диска 3(4),
(ωмр-ωD) - угловая скорость сателлита 10 по отношению к центральному шкиву 16 или к зубчатому колесу, или к зубчатому венцу,
К - передаточное число планетарного механизма.
К=±Dмр/ds;
где Dмр - диаметр центрального шкива 16 или зубчатого колеса, или венца,
ds - диаметр шкива или шестерни сателлита 10.
Знак К зависит от кинематической схемы. К положителен для схем по фиг.6, 11 и отрицателен для схем по фиг.7, 8, 9, 10.
Уравнение в абсолютных скоростях:
ωS abs.=ωS+ωDD;

где ωS abs. - абсолютная угловая скорость сателлита 10.
При этом положительные угловые скорости направлены по часовой стрелке, отрицательные - против часовой стрелки.
Вместо количества зубьев (дискретное исчисление) в расчет для удобства приняты диаметры шкивов или зубчатых колес (непрерывное исчисление).
Случай, когда центральный шкив 16 или зубчатое колесо, или зубчатый венец заблокирован, а диск 3(4) вращается, согласно (2) будет выглядеть следующим образом:
ωS abs.=ωDD(K+1)
Пример расчета скоростей.
Расчет проведен исходя из следующих исходных параметров:
Расчетные скорости по модели, изображенной на фиг.13, определяются исходя из следующих соотношений:
a=r·cosϕ; b=r·sinϕ;

 VDD=ωDDR; Vs=ωsr;
VDD=ωDDR; Vs=ωsr;

где R, M - текущий радиус произвольной точки В на сателлите 10 относительно центра вращения диска 3(4);
r, м - радиус точки В на сателлите 10 относительно центра вращения сателлита 10;
ϕ и ψ - текущие углы, образованные радиусами r и R, соответственно, относительно постоянного радиуса D/2 центра сателлита 10;
VDD - линейная скорость точки BDD, расположенной на планетарном диске прямо под точной В;
Vs - линейная скорость точки В относительно точки BDD;
VΣ - текущая результирующая линейная скорость точки В;
VΣaver - средняя результирующая линейная скорость точки В.
Результаты расчета:
Таким образом, параметры передаточного механизма 11 выбираются из условия обеспечения соотношения минимальной скорости точки В на сателлите 10 к ее максимальной скорости большего, чем 1:3.
График на фиг.15 показывает закон изменения скорости VΣ от минимального до максимального значения.
За счет того, что сателлит 10 с абразивным инструментом выступает за габариты планетарного диска 3, 4, а расстояние между осями соседних планетарных дисков 3, 4 меньше диаметра зоны обработки каждого диска 3, 4 в отдельности, по крайней мере, один из абразивных инструментов каждого планетарного диска 3(4) поочередно перекрывает траекторию абразивного инструмента другого планетарного диска 4(3) на участке между абразивными инструментами последнего. В результате образуется зона перекрытия, расположенная между планетарными дисками 3, 4, которую при вращении сателлиты 10 обоих планетарных дисков 3, 4 поочередно обрабатывают. При обработке образуются пылеобразные отходы, от проникновения которых общим корпусом 5 защищены двигатель 1 и редуктор 2, а корпусами 12 планетарных дисков 3, 4 и общим корпусом 5 защищены байонетные соединения 13, 14 и передаточные механизмы 11.
Схема планетарного диска 3(4) с неподвижным зубчатым венцом 15 обеспечивает вращение сателлитов 10 в направлении, обратном направлению вращения планетарного диска 3(4). Схема с неподвижным центральным зубчатым колесом 15 обеспечивает вращение сателлитов 10 в том же направлении, что и вращение планетарного диска 3(4).
Вращение сателлитов 10 вокруг собственных осей при вращении планетарного диска 3(4) в других случаях обеспечивается ременной передачей, на фиг.6 в одинаковом направлении, на фиг.7-9 в противоположных направлениях.
Так как абразивные инструменты вращаются с сателлитами 10 навстречу друг другу, то в зоне их контакта с обрабатываемой поверхностью образуется результирующая сила, продольно направленная вдоль продольной оси машины. Эта сила позволяет при небольшом усилии на машину со стороны оператора перемещать ее в прямом направлении по поверхности обработки. Машина (при наличии абразивов соответствующего качества) обеспечивает помимо шлифовки высококачественное лощение и полировку поверхностей до глубокого блеска. Планетарные механизмы дисков 3, 4, обеспечивающие вращение абразивов как вокруг оси машины, так и вокруг своей собственной оси, обеспечивают отсутствие кольцевых царапин (следов) на поверхности от абразива.
При необходимости байонетные 13, 14 соединения позволяют без затруднений демонтировать планетарные диски 3, 4 в сборе и прочистить их от пыли или заменить на новые. В этом случае может быть изменена конструкция передаточного механизма 11 и самих сателлитов 10, с сохранением габаритов передаточного диска 3(4) и присоединительных размеров к валам 8, 9 редуктора 2.
Таким образом создана эффективная машина для шлифовки, лощения и полировки полов, а также расширен арсенал указанных машин, в том числе и путем дооборудования существующих машин, прежде всего, российских и производства стран СНГ.
При этом повышена производительность обработки поверхности и исключено образование кольцевых царапин, т.е. обеспечено высокое качество обрабатываемой поверхности за счет усложнения траектории и расширения диапазона скоростей абразивных инструментов, исключено засорение передаточного механизма благодаря наличию последовательной двухступенчатой защиты от каменной пыли, упрощена сборка/разборка с помощью байонетного соединения с одновременным обеспечением оперативной взаимозаменяемости одного или нескольких планетарных дисков совместно с установленными на нем сателлитами, облегчено управление работающей машиной за счет снижения усилий, вырывающих машину из рук на неровностях обрабатываемой поверхности.
Это позволит получить сравнительно недорогие, мощные, тяжелые и производительные машины для лощения и полировки поверхностей, в том числе и на базе существующих недорогих шлифовальных машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
| Бесступенчатая коробка передач с повышенным диапазоном передаточных отношений | 2019 |
|
RU2716396C1 |
| ПЛОСКОШЛИФОВАЛЬНАЯ МАШИНА | 2010 |
|
RU2457931C1 |
| Бурильная машина | 2002 |
|
RU2224076C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1994 |
|
RU2057005C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
Изобретение относится к машиностроению и может быть использовано при шлифовании полов, преимущественно из твердых материалов - бетона, камня и т.п. Машина содержит редуктор и два рабочих органа в виде планетарных дисков, охваченных общим корпусом и установленных с возможностью вращения в противоположных направлениях. Держатели абразивных инструментов равномерно распределены по периферии каждого из дисков и соединены с сателлитами. Последние связаны передаточным механизмом между собой и с планетарным диском с возможностью одновременного вращения вокруг собственной оси и оси планетарного диска. Каждый из дисков выполнен быстросъемным. Предусмотрены отдельные корпуса, охватывающие каждый планетарный диск с его передаточным механизмом и зафиксированные от вращения относительно общего корпуса. Валы планетарных дисков и редуктора снабжены элементами сборно-разборных байонетных соединений, собранных внутри общего корпуса вне корпусов планетарных дисков. В результате повышается производительность и качество обработки, улучшается защита передаточного механизма от каменной пыли и обеспечивается оперативная взаимозаменяемость элементов устройства. 11 з.п. ф-лы, 2 табл., 15 ил.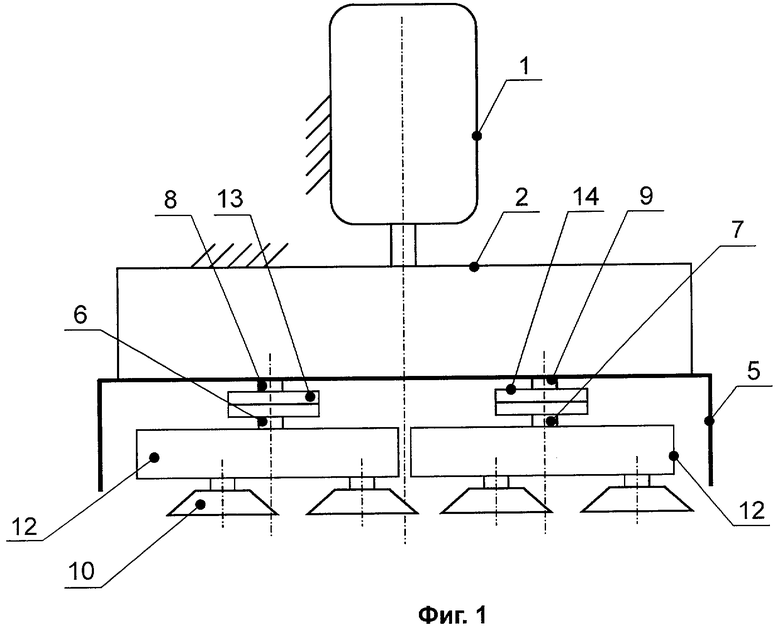
| Плоскошлифовальная машина | 1988 |
|
SU1569190A1 |
| ПЛОСКОШЛИФОВАЛЬНАЯ ПЕРЕДВИЖНАЯ МАШИНА И ШЛИФОВАЛЬНАЯ ГОЛОВКА ДЛЯ ЭТОЙ МАШИНЫ | 2000 |
|
RU2183155C2 |
| Устройство для механической обработки плоских поверхностей | 1977 |
|
SU617032A1 |
| US 5070656 A, 10.12.1991. | |||

