Изобретение относится к машиностроению, а более конкретно к трансмиссиям машин и механизмов, и может найти свое применение в автотракторной технике для обеспечения повышенной проходимости транспортных средств при движении по скользкой дороге и по внедорожью.
Известны конструкции дифференциалов, содержащие крестовины или пальцы, конические сателлиты и полуосевые шестерни, с различными механизмами их блокировки.
Так, известен самоблокирующий дифференциал колесного транспортного средства (см. патент RU 2162974, МПК F 16 Н 48/30, опубл. 10.02.2001 г.), представляющий собой дифференциальную передачу с блокирующим устройством, содержащим сцепную муфту, водило и датчики угловой скорости ведущих колес, электрически связанные с сервоприводом.
Конструкция этого дифференциала имеет сложную взаимосвязь деталей и высокую себестоимость.
Наиболее близким к предлагаемому изобретению является дифференциал В.П.Демина (см. патент RU 2129232, МПК F 16 Н 48/28, опубл. 20.04.99 г.), конструкция которого состоит из полого корпуса с размещенными в нем вращающейся крестовиной, пальцами с сателлитами и полуосевыми шестернями.
Достоинством этого изобретения является относительная простота конструкции и то, что ее автоматическая работа обеспечивается самотормозящими коническими сателлитами и полуосевыми шестернями, а также радиальным смещением оси сателлитов относительно центра полуосевых шестерен.
Недостатками этой конструкции являются необходимость применения винтовых самотормозящих конических шестерен сложной конфигурации с зубьями в форме витков и то, что дифференциал постоянно находится в заблокированном состоянии, приводящем к повышенному износу шин и перерасходу топлива (разблокировка дифференциала наступает лишь при обгонном движении одного колеса относительно другого - на поворотах транспортного средства).
Предлагаемым изобретением решается задача ликвидации недостатков прототипа и упрощение конструкции, позволяющей обеспечить повышенную проходимость транспортных средств по скользкой дороге без блокировки ведомых колес.
Для достижения этого технического результата в дифференциале С.Е. и Е.Н.Ползиковых (далее по тексту - "дифференциал"), содержащем полный корпус, вращающуюся крестовину, сателлиты и полуосевые шестерни, крестовина снабжена двумя сателлитами и двумя трехшестеренчатыми блоками, находящимися в зацеплении с полуосевыми шестернями.
Благодаря тому, что крестовина снабжена двумя сателлитами и двумя трехшестеренчатыми блоками, находящимися в зацеплении с полуосевыми шестернями, обеспечивается автоматическое перераспределение крутящих моментов между колесами в зависимости от изменения их сцепления с дорогой.
Дифференциал иллюстрируется чертежами.
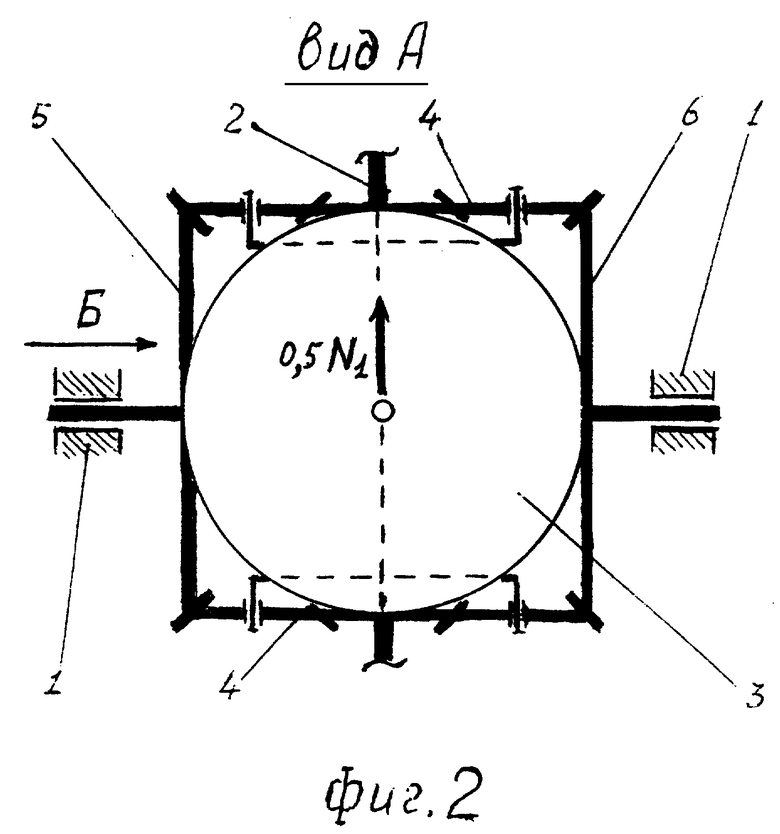
На фиг.1 представлена кинематическая схема дифференциала с вращающейся крестовиной, где 0,25 N2 - равнозначные усилия, передаваемые крестовиной через трехшестеренчатый блок на левую и правую полуосевые шестерни.
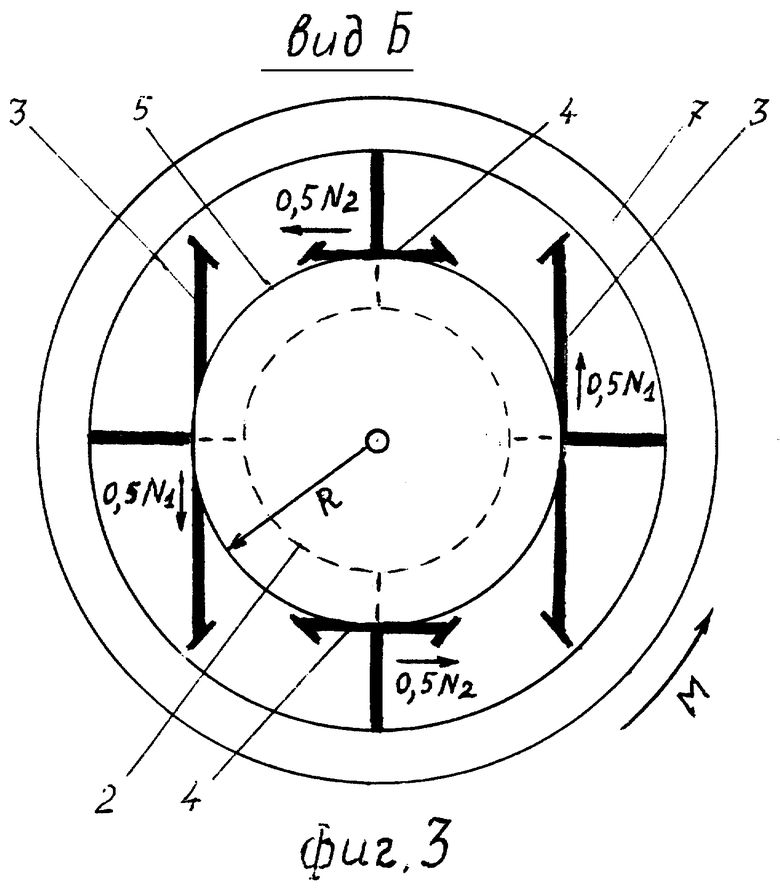
На фиг.2 - вид А, где 0,5 N1 - усилие, передаваемое крестовиной на полуосевые шестерни через сателлит.
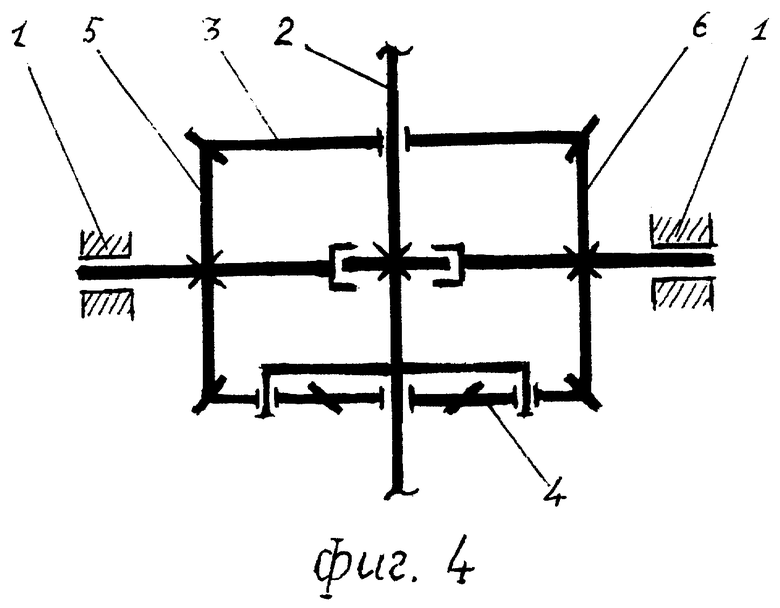
На фиг.3 - вид Б, где 0,5 N1 и 0,5 N2 - усилия от крутящего момента М, распределяемые крестовиной по сателлитам и трехшестеренчатым блокам.
На фиг.4 изображен вариант дифференциала, содержащий, взамен крестовины, вращающийся палец.
Дифференциал с вращающейся крестовиной (фиг.1) состоит из корпуса 1, крестовины 2 с двумя свободно установленными сателлитами 3 и двумя жестко установленными трехшестеренчатыми блоками 4, левой полуосевой шестерни 5 и правой полуосевой шестерни 6 полуосей ведомых колес (на чертеже не указаны).
Трехшестеренчатый блок 4 состоит из совмещенного с крестовиной стержня с тремя осями и установленных на них находящихся в последовательном зацеплении трех конических шестерен.
Сателлиты 3 и крайние шестерни блоков 4 находятся в постоянном зацеплении с полуосевыми шестернями 5 и 6.
Работа самобалансирующего дифференциала происходит следующим образом.
Крестовина 2, вращаясь совместно с ведомой шестерней 7 главной передачи (фиг.3), распределяет ее крутящий момент М на два равнозначных усилия: N1, передаваемое на два сателлита 3 (по 0,5 N1), и N2, передаваемое на два трехшестеренчатых блока 4 (по 0,5 N2).
При сцеплении с дорогой обоих ведомых колес транспортного средства сателлиты 3 (фиг.2) и трехшестеренчатые блоки 4 (фиг.1) создают на полуосевых шестернях 5 и 6 равнозначные крутящие моменты: M1=0,5N1×R=0,25M и M2=0,5N2×R=0,25M. Полуосевые шестерни 5 и 6, воспринимая равнозначные крутящие моменты (M1+M2=0,5M), вращают колеса с равнозначной угловой скоростью.
При уменьшении и отсутствиисцепления с дорогой одного из двух колес трехшестеренчатые блоки 4 автоматически плавно перераспределяют между ними крутящие моменты и вращают колеса с различной угловой скоростью.
При отсутствии сцепления с дорогой, например правого колеса:
- сателлиты 3 (фиг.2) создают, относительно "точек" их зацепления с полуосевой шестерней 5 левого небуксующего колеса, крутящий момент, соответствующий (0,5N1×R)×2=0,25M×2=1/2M (где R - радиус сателлита), и, перекатываясь по вращающейся полуосевой шестерне 5, перераспределяют его на правую полуосевую шестерню 6 буксующего колеса;
- трехшестеренчатые блоки 4 (фиг.1) создают, относительно зацепления их крайних ("левых") шестерней с той же полуосевой шестерней 5, крутящий момент, соответствующий (0,5N2×1/3R)×2=0,25M×21/3=1/2M×1/3=1/6M, и, перекатывая свои "левые" шестерни по вращающейся полуосевой шестерне 5, перераспределяет его (через вращающиеся средние и "правые" шестерни) на полуосевую шестерню 6;
- левая полуосевая шестерня 5 осуществляет свое вращение с крутящим моментом, соответствующим 1/2М-1/6М=1/3М, а правая полуосевая шестерня 6 - с крутящим моментом, соответствующим 1/2М+1/6М=2/3М;
- при одном обороте крестовины 2 осуществляют вращение вокруг своих осей: сателлиты 3 - в 2/3 оборота, шестерни блоков 4 - в 2 оборота, левая полуосевая шестерня 5 ведомого колеса - в 2/3 оборота, правая полуосевая шестерня 6 буксующего колеса - в 4/3=11/3 оборота;
- автоматически обеспечивается движение транспортного средства с уменьшенной в 3 раза скоростью, что повышает устойчивость против заноса на поворотах.
При восстановлении сцепления обоих колес с дорогой трехшестеренчатые блоки 4 плавно выравнивают частоту их вращения.
Использование изобретения обеспечивает повышенную проходимость транспортных средств по скользкой дороге и по внедорожью без устройства второго ведущего моста с дифференциалом и без применения механизма блокировки колес, что позволяет значительно упростить и снизить себестоимость трансмиссий автотракторной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТИБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ (ВАРИАНТЫ) | 2007 |
|
RU2339859C1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ | 2006 |
|
RU2319873C1 |
| МЕХАНИЗМ ПЛАНЕТАРНОГО СЦЕПЛЕНИЯ | 2004 |
|
RU2280201C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВРАЩЕНИЯ ВЫХОДНЫХ ВАЛОВ ДИФФЕРЕНЦИАЛА | 2010 |
|
RU2435089C1 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПРОТИВОБУКСУЮЩАЯ ПЕРЕДАЧА | 1993 |
|
RU2091645C1 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
| Самоблокирующийся дифференциал Меняйленко А.И. | 1990 |
|
SU1750993A1 |
| Принудительно блокируемый конический дифференциал транспортного средства (варианты) | 2019 |
|
RU2711320C1 |
| Принудительно блокируемый конический дифференциал транспортного средства | 2020 |
|
RU2731829C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в автотракторной технике для обеспечения повышенной проходимости транспортных средств при движении по скользкой дороге и внедорожью. Дифференциал содержит полый корпус 1, вращающуюся крестовину 2 с двумя сателлитами 3, полуосевые шестерни 5 и 6, два трехшестеренчатых блока 4. Каждый блок состоит из совмещенного с крестовиной стержня с тремя осями, установленных на них и находящихся в последовательном зацеплении трех конических шестерен. Крайние из конических шестерен находятся в зацеплении с полуосевыми шестернями 5 и 6. Обеспечивается автоматическое перераспределение крутящих моментов между колесами в зависимости от изменения их сцепления с дорогой. Технический результат - упрощение конструкции, обеспечение повышенной проходимости транспортных средств по скользкой дороге без блокировки ведомых колес. 4 ил.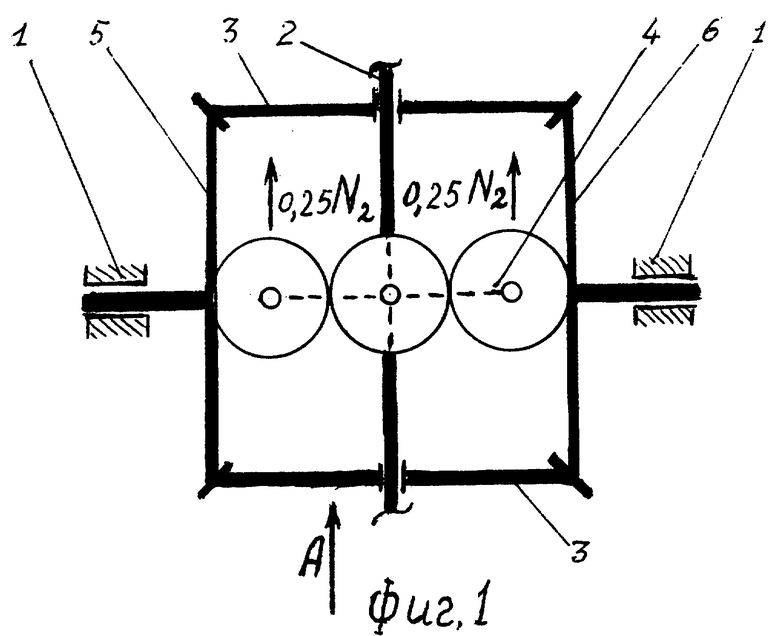
Дифференциал, содержащий полый корпус, вращающуюся крестовину, сателлиты и полуосевые шестерни, отличающийся тем, что крестовина снабжена двумя сателлитами и двумя трехшестеренчатыми блоками, каждый из которых состоит из совмещенного с крестовиной стержня с тремя осями, установленных на них и находящихся в последовательном зацеплении трех конических шестерен, крайние из которых находятся в зацеплении с полуосевыми шестернями.
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| US 6342025 B1, 29.01.2002 | |||
| US 6206798 B1, 27.03.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПОМЕХИ НА КОСМИЧЕСКОМ АППАРАТЕ В ПОЛЕТЕ | 2009 |
|
RU2408507C1 |

