Изобретение относится к космической технике и может быть использовано для определения магнитной помехи, которая учитывается при планировании и проведении магниточувствительных научных экспериментов на борту космического аппарата (КА).
Основные способы определения магнитной помехи, вызванной собственной намагниченностью КА, используемые на данный момент, приведены в [1]. Существуют три основных способа.
Первый способ заключается в подвешивании КА на торсионе и наблюдении за его угловым отклонением за счет взаимодействия собственного дипольного магнитного момента КА с внешним магнитным полем. Способ имеет существенные недостатки: требует подвески сравнительно тяжелого объекта измерений, т.е. КА, на торсионе, причем диаметр торсиона для увеличения точности измерений должен быть как можно меньше, а длина как можно больше. Кроме того, возникает проблема точной статической балансировки КА, так как даже незначительный дебаланс очень сильно влияет на точность измерений.
Второй способ заключается во вращении КА внутри сферического объема, созданного двумя коаксиальными индукционными катушками с переменным шагом намотки. Одна катушка используется для компенсации магнитного поля Земли (МПЗ), вторая является измерительной, т.е. э.д.с., возникающая в ней при вращении КА, пропорциональна дипольному магнитному моменту, перпендикулярному оси вращения. Существенным недостатком данного способа является то, что подвес КА, вращающегося со скоростью порядка одного оборота в секунду, требует мощных поддерживающих устройств и поэтому пригоден только при испытаниях малых КА.
Наиболее близким из аналогов является третий способ, выбранный авторами за прототип и заключающийся в измерении магнитного поля КА и вычислении магнитного момента по данным измерений. Данный способ требует выполнения магнитной съемки величины компоненты Вr КА на расстоянии от КА α=const. Точки съемки должны покрывать сферу сеткой с интервалами по θ и λ в 10°-20°. Обычно используется упрощенная схема с неподвижным магнитным датчиком и установкой для поворота КА.
Все описанные способы-аналоги и прототип обладают существенным недостатком - наличием механических частей, необходимых для манипулирования КА, а также невозможностью применения их в полете. В то же время из-за стыковок КА с новыми аппаратами, перемещения грузов внутри КА и т.д. магнитная помеха меняется, и поэтому ее необходимо определять в полете.
Задачей предлагаемого способа является обеспечение определения магнитной помехи КА в полете.
Технический результат достигается тем, что в способе определения магнитной помехи на КА в полете, основанном на измерении вектора напряженности МПЗ  , в отличие от известного измеряют в оптическом диапазоне направление на выбранную звезду
, в отличие от известного измеряют в оптическом диапазоне направление на выбранную звезду  , вектор направления на которую отклонен от нормали к плоскости орбиты КА, измеряют угол α между
, вектор направления на которую отклонен от нормали к плоскости орбиты КА, измеряют угол α между  и
и  и на момент времени, когда угол α является максимальным в диапазоне 0<α≤90°, определяют магнитную помеху Δ по формуле
и на момент времени, когда угол α является максимальным в диапазоне 0<α≤90°, определяют магнитную помеху Δ по формуле  , где
, где  - вектор направления на выбранную звезду, заданный в абсолютной системе координат,
- вектор направления на выбранную звезду, заданный в абсолютной системе координат,  - рассчитанный вектор напряженности МПЗ, заданный в абсолютной системе координат,
- рассчитанный вектор напряженности МПЗ, заданный в абсолютной системе координат,  - измеренный вектор напряженности МПЗ в связанной системе координат.
- измеренный вектор напряженности МПЗ в связанной системе координат.
Предлагаемый способ основан на применении метода наименьших квадратов для определения компонент вектора магнитной помехи на основе большого набора совместных измерений вектора направления на выбранную звезду и вектора напряженности МПЗ . Требование проведения измерений в момент времени, соответствующий максимальному углу α в диапазоне 0<α≤90°, введено для уменьшения погрешностей определения компонент вектора магнитной помехи.
Считаем, что система определения ориентации КА помимо магнитометра включает датчик, показания которого дают дополнительные сведения об угловом положении объекта. Источниками информации об ориентации КА могут являться показания датчиков солнечной ориентации, местной вертикали, звезд и т.д.
Пусть вектор напряженности МПЗ вектор направления на выбранную звезду рассчитываются в базовой (абсолютной или орбитальной) системе координат с пренебрежимо малой ошибкой. Считаем также, что измерение вектора в связанной с объектом системе координат проводится достаточно точно. При наличии магнитной помехи Δ с магнитометра снимается сигнал

где вектор  - вектор напряженности МПЗ, заданный в осях объекта. Используем очевидное соотношение:
- вектор напряженности МПЗ, заданный в осях объекта. Используем очевидное соотношение:

тогда



Введем для удобства следующие обозначения:


 где
где  ,
,  ,
,  - компоненты искомого вектора в связанной системе координат, а
- компоненты искомого вектора в связанной системе координат, а  ,
,  ,
,  - компоненты вектора .
- компоненты вектора .
Считая, что проводимые измерения независимые, равноточные и что ошибка измерений распределена по нормальному закону с известной дисперсией и нулевым математическим ожиданием, из соотношения (5) с учетом введенных обозначений (6) получим:

где n - количество проведенных измерений, a i - номер измерения.
Для удобства введем дополнительно обозначение:

В соответствии с методом наименьших квадратов составим выражение для невязки i-го измерения:

Характерной величиной наилучшего подбора величин , , является сумма квадратов невязок всех проведенных измерений:

В рамках метода наименьших квадратов компоненты вектора магнитных помех , , определяются из условия минимума суммы квадратов невязок (11). Минимум величины G находится из условия равенства нулю первых производных величины G по переменным , , :
Преобразуем систему уравнений (12) к следующему виду:

Полученные нормальные уравнения образуют систему неоднородных линейных уравнений. Для решения данной системы запишем ее в матричной форме:

Решение находится следующим образом:
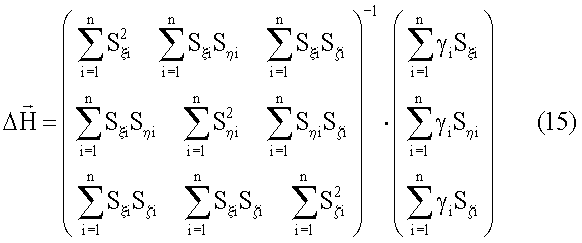
Полученное выражение (15) позволяет определить компоненты вектора магнитной помехи в том случае, если вектор  , иначе возникают трудности при обращении матрицы. Условию
, иначе возникают трудности при обращении матрицы. Условию  при использовании звездных датчиков соответствует случай движения КА в режиме орбитальной ориентации, при котором плоскость орбиты нормальна к направлению на выбранную звезду или имеется постоянная инерциальная ориентация объекта на всем обрабатываемом интервале полета.
при использовании звездных датчиков соответствует случай движения КА в режиме орбитальной ориентации, при котором плоскость орбиты нормальна к направлению на выбранную звезду или имеется постоянная инерциальная ориентация объекта на всем обрабатываемом интервале полета.
Для расчета величины вектора  напряженности МПЗ, входящего в соотношение (6), используется его аналитическое представление, основанное на разработанной Гауссом теории разложения магнитного потенциала Земли в ряд по сферическим функциям [2]:
напряженности МПЗ, входящего в соотношение (6), используется его аналитическое представление, основанное на разработанной Гауссом теории разложения магнитного потенциала Земли в ряд по сферическим функциям [2]:

где α - средний радиус Земли (6371.2 км), r, φ, θ - сферические координаты точки наблюдения  - квазинормированный по Шмидту присоединенный полином Лежандра первого рода n-й степени и m-го порядка,
- квазинормированный по Шмидту присоединенный полином Лежандра первого рода n-й степени и m-го порядка,  ,
,  - коэффициенты, заданные используемой моделью МПЗ, N - количество гармоник разложения скалярного потенциала МПЗ.
- коэффициенты, заданные используемой моделью МПЗ, N - количество гармоник разложения скалярного потенциала МПЗ.
Напряженность МПЗ определяется формулой:

Проекции вектора определяются по формулам:



где X', Y', Z' - проекции вектора напряженности МПЗ на оси географической системы координат.
Квазинормированные по Шмидту функции обозначены волнистой линией. Они связаны с ненормированными функциями следующими соотношениями:

Явный вид функций Лежандра известен, и они могут быть легко вычислены по прямым формулам:


Коэффициент нормировки сферических функций вычисляется по формуле:

 ,
,
где  - наибольшее целое положительное число, содержащееся в
- наибольшее целое положительное число, содержащееся в  .
.
Вековой ход МПЗ может быть учтен пересчетом коэффициентов по формулам:


Где t - момент времени, для которого ищутся коэффициенты; (t-2005) - время, исчисляемое в годах, начиная с начала 2005 г. до момента t. Международная аналитическая модель МПЗ позволяет определять компоненты вектора напряженности с точностью порядка 20-50 γ.
В настоящее время технически все готово для реализации предложенного способа. Для измерения вектора напряженности МПЗ может использоваться магнитометр СМ-8М, установленный на PC MKC.
Для измерения в оптическом диапазоне направления на выбранную звезду могут использоваться звездные или солнечные датчики, также установленные на MKC, типа БОКЗ, БОКС.
Имеющиеся в настоящее время на MKC измерительные и вычислительные средства позволяют измерять угол α между и , фиксировать момент, когда угол α является максимальным в диапазоне 0<α≤90° и определять магнитную помеху с применением МНК.
Предложенный способ позволяет определять магнитную помеху в полете, что важно, поскольку вследствие изменения конфигурации КА типа MKC в полете, перемещения грузов и сменой режимов работы бортовых систем величина и направление вектора магнитной помехи меняется и требуется ее периодическое определение.
Список литературы
1. Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. М.: Машиностроение, 1975, 248 с.
2. ГОСТ 25645.126-85. ПОЛЕ ГЕОМАГНИТНОЕ. Модель поля внутриземных источников. М.: Государственный комитет СССР по управлению качеством продукции и стандартам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2408508C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ В ИОНОСФЕРЕ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093861C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕННОЙ ПРИВЯЗКИ ТЕЛЕМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ С КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2641024C2 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
Изобретение относится к управлению полетом космических аппаратов с использованием данных о магнитном поле Земли (МПЗ). Способ включает измерение векторов напряженности МПЗ и направления на выбранную звезду (в оптическом диапазоне). Последний вектор должен быть отклонен от нормали к плоскости орбиты космического аппарата. Измеряют угол между этими векторами и на момент времени, когда этот угол является максимальным в диапазоне 0°…90°, определяют магнитную помеху по определенной формуле. В эту формулу входят заданные в абсолютной системе координат вектор направления на выбранную звезду и рассчитанный вектор напряженности МПЗ, а также измеренный вектор напряженности МПЗ в связанной системе координат. Для измерения вектора напряженности МПЗ может использоваться магнитометр СМ-8М, установленный на российском сегменте Международной космической станции. Для измерения направления на выбранную звезду могут использоваться звездные или солнечные датчики. Техническим результатом изобретения является возможность определения магнитной помехи КА в полете.
Способ определения магнитной помехи на космическом аппарате в полете, включающий измерение вектора напряженности магнитного поля Земли  , отличающийся тем, что измеряют в оптическом диапазоне вектор
, отличающийся тем, что измеряют в оптическом диапазоне вектор  направления на выбранную звезду, который отклонен от нормали к плоскости орбиты космического аппарата, измеряют угол α между
направления на выбранную звезду, который отклонен от нормали к плоскости орбиты космического аппарата, измеряют угол α между  и
и  , и на момент времени, когда угол α является максимальным в диапазоне 0<α≤90°, определяют магнитную помеху
, и на момент времени, когда угол α является максимальным в диапазоне 0<α≤90°, определяют магнитную помеху  по формуле
по формуле  , где
, где  - вектор направления на выбранную звезду, заданный в абсолютной системе координат,
- вектор направления на выбранную звезду, заданный в абсолютной системе координат,  - рассчитанный вектор напряженности магнитного поля Земли, заданный в абсолютной системе координат,
- рассчитанный вектор напряженности магнитного поля Земли, заданный в абсолютной системе координат,  - измеренный вектор напряженности магнитного поля Земли в связанной системе координат.
- измеренный вектор напряженности магнитного поля Земли в связанной системе координат.
| US 4746085 А, 24.05.1988 | |||
| US 4010921 A, 08.03.1977 | |||
| Устройство для определения курса с компенсацией магнитных помех | 1987 |
|
SU1643932A1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |

