Изобретение относится к радиолокации, в частности к системам встроенного контроля бортовой моноимпульсной РЛС.
Для проверки исправности бортовых РЛС на всем интервале жизненного цикла широко используется контроль, который позволяет в составе носителя своевременно выявлять не исправные РЛС, определять и компенсировать уходы калибровки при боевой работе. Достоверность контроля зависит от степени охвата контролем систем РЛС, включая антенную систему, и во многом определяется применяемым при контроле имитатором сигнала цели.
В системе встроенного контроля калибровки моноимпульсной РЛС [1] имитируеется внутренний тест сигнал, который вводится через направленный ответвитель, установленный между одним из четырех входов-выходов моноимпульсной антенны и соответствующим входом-выходом суммарно-разностного преобразователя. Имитация внутреннего тест сигнала производится как при проверках РЛС на Земле, так и при калибровке РЛС перед боевой работой, и зависит от уровня внешних помех. Анализ уровня помех производится по принимаемому сигналу сигнальным процессором приемника. Если уровень помех выше порога, то калибровка не производится и при боевой работе используются паспортные коэффициенты коррекции, полученные при работе по внешнему тест-сигналу, излучаемому тест антенной в дальней зоне в лабораторных условиях. Если помеха меньше порога, включается внутренний тест сигнал, по результатам измерения которого сигнальный процессор определяет отличие измеренного пеленга от паспортизованного в лабораторных условиях. Если относительная погрешность больше порога, в боевой работе используются данные паспортной коррекции, полученные по внешнему тест сигналу в лабораторных условиях, в ином случае найденное соотношение используется для масштабирования паспортных коэффициентов коррекции, соответствующих работе по внутреннему тест-сигналу.
Достоинством схемы является возможность учесть изменения в калибровке угловых измерений, связанные с температурными уходами и старением, вызывающих разбаланс приемных каналов моноимпульсной РЛС по усилению и фазе.
Недостатком схемы является то, что в системе контроля калибровки результат не зависит от ориентации антенны, ибо тест сигнал вводится между антенной и суммарно-разностным преобразователем, соответственно контролем калибровки охвачен только приемник и не охвачена антенна РЛС. Кроме того, имитация внутреннего тест сигнала не связана с работой передатчика, не синхронизирована с моментом формирования импульса передатчика, его несущей частотой и фазой, поэтому не возможна проверка калибровки когерентных РЛС, в которых когерентное накопление сигнала является составной частью процедуры обработки отраженного сигнала в приемнике РЛС, измеряющей пеленг.
Встроенная система проверки калибровки [2], работающая в ближней зоне антенны РЛС, в т.ч. во время полета, основана на приеме сигнала, излучаемого антенной РЛС, выносным имитатором сигнала цели, формирующим на несущей частоте пачку затухающих задержанных сигналов, и переизлучении ее в сторону антенны РЛС. При проверках РЛС производит измерение координат имитируемых целей в заданном коридоре задержек. По результатам сравнения измеренных координат с паспортными данными определяются ошибки, которые учитываются при боевой работе.
Устройство имитатора цели состоит из антенны, выход которой через согласующий импеданс соединен с волноводом, второй конец которого соединен с отражающей сигнал нагрузкой. Волновод (кабель) выполнен в виде компактно свернутой спирали.
Достоинством устройства является простота получения когерентного имитируемого сигнала цели в анализируемом коридоре дальностей, позволяющего кроме калибровки провести контроль работы основных узлов РЛС, включая приемник, передатчик, антенну и устройство обработки сигнала, проводящее оценку измеряемых координат. Имитатор цели компактен и работает в ближней зоне антенны проверяемой РЛС.
Недостатком устройства является то, что затухание задержанного сигнала на несущей частоте даже при минимальной рабочей дальности РЛС может оказаться ниже пороговой чувствительности приемника.
Система наземного контроля [3], принятая в качестве прототипа, содержит имитатор цели, соединенный с тестерной антенной, связанной по радиоканалу с антенной проверяемого радиолокационного визира, в частном случае это моноимпульсная РЛС. Тестерная антенна устанавливается на время контроля на посадочные места антенны визира в ее ближней зоне. На имитатор цели от визира подается гетеродинный сигнал. Имитация цели происходит следующим образом. Сигнал, принятый тестерной антенной, через циркулятор поступает на первый смеситель, где смешивается с гетеродинным сигналом, далее усиливается в первом усилителе промежуточной частоты (УПЧ), задерживается линией задержки, усиливается вторым УПЧ, переносится на несущую с помощью второго смесителя и гетеродинного сигнала, полученный задержанный на несущей частоте сигнал через циркулятор поступает на тестерную антенну и переизлучается по радиоканалу в сторону антенны радиолокационного визира. В радиолокационном визире производится измерение координат имитируемой цели с выдачей их значений в систему управления, которая сравнивает принятую информацию с пороговыми значениями и делает вывод о исправности визира.
Достоинством схемы контроля является охват контролем всех систем, включая передатчик, приемник, систему измерения дальности и угла, антенную систему. Кроме того, имитатор цели позволяет проверять работу радиолокационного визира, использующего когерентную обработку сигнала.
Недостатком системы является то, что имитатор цели совместно с тестерной антенной не может быть использован в системе встроенного контроля, ввиду больших потерь сигнала в радиолинии при допустимо малых размерах контрольной антенны, не затеняющих антенну визира, при которых имитируемый сигнал должен быть выше пороговой чувствительности приемника. Именно поэтому перед линией задержки использован первый УПЧ, и проверка работы визира производится только на одной относительно небольшой задержке сигнала рабочего диапазона дальностей, соответственно калибровка визира и учет ее ухода во время полета перед боевой работой не возможна.
Целью предлагаемого изобретения является создание системы встроенного контроля и калибровки, обеспечивающая как высокую полноту контроля узлов моноимпульсной РЛС при эксплуатации, так и проверку калибровки, в том числе во время полета носителя, позволяющую учесть ее уходы перед выполнением боевой работы.
Поставленная цель реализуется тем, что от проверяемой моноимпульсной РЛС (радиолокационного визира) при контроле выводится часть мощности зондирующего сигнала, которая поступает на имитатор сигнала цели, где через циркулятор поступает на сумматор с гетеродинным сигналом имитатора, суммарный сигнал поступает на смеситель, где входной сигнал переносится на промежуточную частоту и поступает на схему рециркуляции, построенную на последовательно соединенных втором сумматоре и линии задержки, охваченных цепью обратной связи в виде усилителя, затухающая пачка задержанных импульсов возвращается на смеситель, где с помощью гетеродинного сигнала переносится на несущую частоту, проходит через циркулятор на последовательно соединенные вентиль, тестерную антенну и радиоканал связи на антенну моноимпульсной РЛС.
Для достижения поставленной цели система контроля [3], содержащая моноимпульсную РЛС, первый выход которой соединен с входом имитатора сигнала цели, в котором установлены тестерная антенна, являющаяся выходом имитатора цели, связанная радиоканалом с антенной моноимпульсной РЛС, последовательно соединенные линия задержки и усилитель, первый циркулятор и смеситель, в моноимпульсной РЛС с первого по четвертый входы-выходы антенной системы соединены с одноименными входами-выходами суммарно-разностного преобразователя, пятый вход-выход которого через второй циркулятор соединен с первым входом моноимпульсного приемника, первый и второй выходы суммарно-разностного преобразователя соединены с третьим и вторым входом моноимпульсного приемника соответственно, первый, второй и третий выходы моноимпульсного приемника соединены с одноименными входами процессора, четвертый вход-выход которого соединен с входом-выходом передатчика, четвертым входом-выходом моноимпульсного приемника, пятым входом-выходом антенной системы, процессор управляет параметрами сигнала передатчика и угловым положением антенной системы, настройкой моноимпульсного приемника, выполняет оцифровку и цифровую обработку сигнала на выходе моноимпульсного приемника с обнаружением, захватом сопровождением, измерением и выдачей координат целей потребителю, шестой вход-выход процессора является вторым входом-выходом моноимпульсной РЛС, отличается тем, что в имитатор цели введены второй вентиль и второй сумматор, последовательно включенные гетеродин, первый вентиль и первый сумматор, в моноимпульсную РЛС введены последовательно соединенные второй направленный ответвитель, детектор и коммутатор, последовательно соединенные первый направленный ответвитель и ключ, при этом в имитаторе цели первый вход-выход первого сумматора через последовательно соединенные первый циркулятор и второй вентиль соединен с входом тестерной антенны, первый вход-выход смесителя соединен с третьим входом-выходом первого сумматора, второй вход-выход смесителя соединен с первым входом-выходом второго сумматора, выход которого соединен с входом линии задержки, выход усилителя соединен с вторым входом второго сумматора, в моноимпульсной РЛС первый выход передатчика через последовательно включенные второй и первый направленный ответвитель соединен с третьим входом второго циркулятора, второй выход передатчика соединен с одноименным входом коммутатора, выход которого соединен с пятым входом процессора, четвертый выход моноимпульсного приемника соединен с первым входом коммутатора, четвертый вход-выход коммутатора соединен с вторым входом-выходом ключа и четвертым входом-выходом процессора, управляющего процессом встроенного контроля в режимах поиска, захвата и сопровождения сигнала, по результатам поиска цели со сканированием антенной системы определяющего пеленгационную характеристику РЛС, по результатам захвата и сопровождения определяющего ошибки измерения координат имитируемой цели, контролируемые параметры передатчика, приемника и сигнала детектора, сравнивающего значения контролируемых параметров с паспортными данными, определяющего по результатам сравнения исправность РЛС и уходы калибровки, которые запоминает и учитывает при измерениях координат целей при боевой работе, выход ключа является первым выходом моноимпульсной РЛС, тестерная антенна находится в ближней зоне и на продольной оси антенной системы моноимпульсной РЛС.
Сущность изобретения поясняется дальнейшим описанием со ссылками на следующие чертежи.
На фиг.1 представлена структурная схема системы.
На фиг 2 представлен алгоритм работы системы встроенного контроля и калибровки моноимпульсной РЛС.
На фиг.1 приняты следующие обозначения:
1 - Имитатор цели (ИЦ);
2 - Моноимпульсная РЛС (МРЛС);
3 - Первый циркулятор;
4 - Первый сумматор (СУМ 1);
5 - Первый вентиль (В 1);
6 - Гетеродин (ГЕТ);
7 - Второй вентиль (В 2);
8 - Смеситель (CM);
9 - Второй сумматор (СУМ 2);
10 - Линия задержки (ЛЗ);
11 - Тестерная антенна (А);
12 - Усилитель (УС);
13 - Антенная система (AC);
14 - Второй циркулятор;
15 - Суммарно-разностный преобразователь (СРП);
16 - Ключ (КЛ);
17 - Первый направленный ответвитель (НО 1);
18 - Второй направленный ответвитель (НО 2);
19 - Моноимпульсный приемник (ПРМ);
20 - Коммутатор (КОМ);
21 - Детектор (Д);
22 - Передатчик (ПРД);
23 - Процессор (ПРЦ).
На фиг.1 гетеродин 6 через последовательно включенные первый вентиль 5, первый сумматор 4, первый циркулятор 3 и второй вентиль 7 соединен с входом тестерной антенны 11, третий вход-выход первого сумматора 4 соединен с первым входом-выходом смесителя 8, второй вход-выход которого соединен с первым входом-выходом второго сумматора 9, выход линии задержки 10 через последовательна включенные усилитель 12, второй сумматор 9, соединен с входом линии задержки 10, выход тестерной антенны через радиолинию связан с антенной системой моноимпульсной РЛС, первый выход передатчика 22 через последовательно включенные второй направленный ответвитель 18, первый направленный ответвитель 17 и ключ 16 соединен с первым входом первого циркулятора 3, третий выход второго направленного ответвителя 18 через детектор 21 соединен с третьим входом коммутатора 20, четвертый выход моноимпульсного приемника 19 соединен с первым входом коммутатора 20, выход которого соединен с пятым входом процессора 23, второй выход передатчика 22 соединен с одноименным входом коммутатора, пятый вход-выход суммарно-разностного преобразователя 15 через второй циркулятор 14 соединен с первым входом моноимпульсного приемника 19, первый, второй и третий выходы которого соединены с одноименными входами процессора 23, первый, второй, третий и четвертый входы-выходы антенной системы 13 соединены с одноименными входами-выходами суммарно-разностного преобразователя 15, первый и второй выходы которого соединены с третьим и вторым входом моноимпульсного приемника 19 соответственно, четвертый вход-выход процессора 23 соединен с четвертым входом-выходом моноимпульсного приемника 19, входом-выходом передатчика 22, вторым входом-выходом ключа 16, четвертым входом-выходом коммутатора 20 и пятым входом-выходом антенной системы 13, шестой вход-выход процессора 23 является вторым входом-выходом моноимпульсной РЛС 2.
Элементы, входящие в имитатор цели и моноимпульсную РЛС, широко используются в радиолокации и не требуют пояснений по реализации.
Первый сумматор 4 может быть выполнен на основе двух шлейфового направленного ответвителя [4, рис.4.37, с.194]. Второй сумматор 9 может быть выполнен на основе кольцевого делителя мощности [4, рис.4.36, с.193]. Тестерная антенна может быть выполнена в виде полуволнового вибратора.
Работа моноимпульсной РЛС 2 в боевом режиме не требует особого пояснения. При этом тестерная антенна 11 имитатора сигнала цели 1 находится в вершине обтекателя антенной системы 13, имеет достаточно малые размеры, которые не деформируют пеленгационную характеристику антенной системы 13 и не существенно снижают ее усиление. Процессор 23 управляет параметрами сигнала передатчика 22, настройками моноимпульсного приемника 19 и угловым положением антенной системы 13. Сигнал передатчика 22 через направленные ответвители 18 и 17, циркулятор 14, суммарно-разностный преобразователь 15 и антенную систему 13 излучается в заданном направлении. Текущее положение оси антенной системы 13 управляется процессором 23 по пятому входу-выходу антенной системы 13 и учитывается при поиске, обработке и слежении за отраженным сигналом. Отраженный сигнал, принятый антенной системой 13, через суммарно-разностный преобразователь 15 и циркулятор 14 поступает в моноимпульсный приемник 19, далее в процессор 23, где производится оцифровка, обнаружение, селекция сигналов цели, выбор цели, сопровождение, измерение ее координат с учетом данных калибровки, зашитых в память, и выдачу их потребителю.
В отличие от боевой работы, где производится поиск, обнаружение, захват, сопровождение цели и измерение ее координат, при встроенном контроле по циклограмме контроля дополнительно при сканировании антенного луча производится измерение пеленгационной характеристики антенны в узком секторе, центр которого соответствует направлению на имитируемую цель, измерение токов и напряжений передатчика 22, приемника 19, амплитуды и длительности сигналов детектора 21, отражающих мощность и длительность зондирующего сигнала передатчика 22. В качестве контролируемых токов и напряжений передатчика 22 и приемника 19 являются напряжения в точках контролируемых узлов, напряжения источников питания, токи потребления в режиме молчания, излучения и в паузах между зондирующими импульсами.
Сравнением результатов измерений координат сопровождаемой цели и всех контролируемых напряжений с допусками определяют исправность РЛС, возможность ее использования при решении боевой задачи. Сравнением измеренной пеленгационной характеристики с паспортной, зашитой в память, определяются уходы калибровки РЛС по углу, которые учитываются при боевой работе.
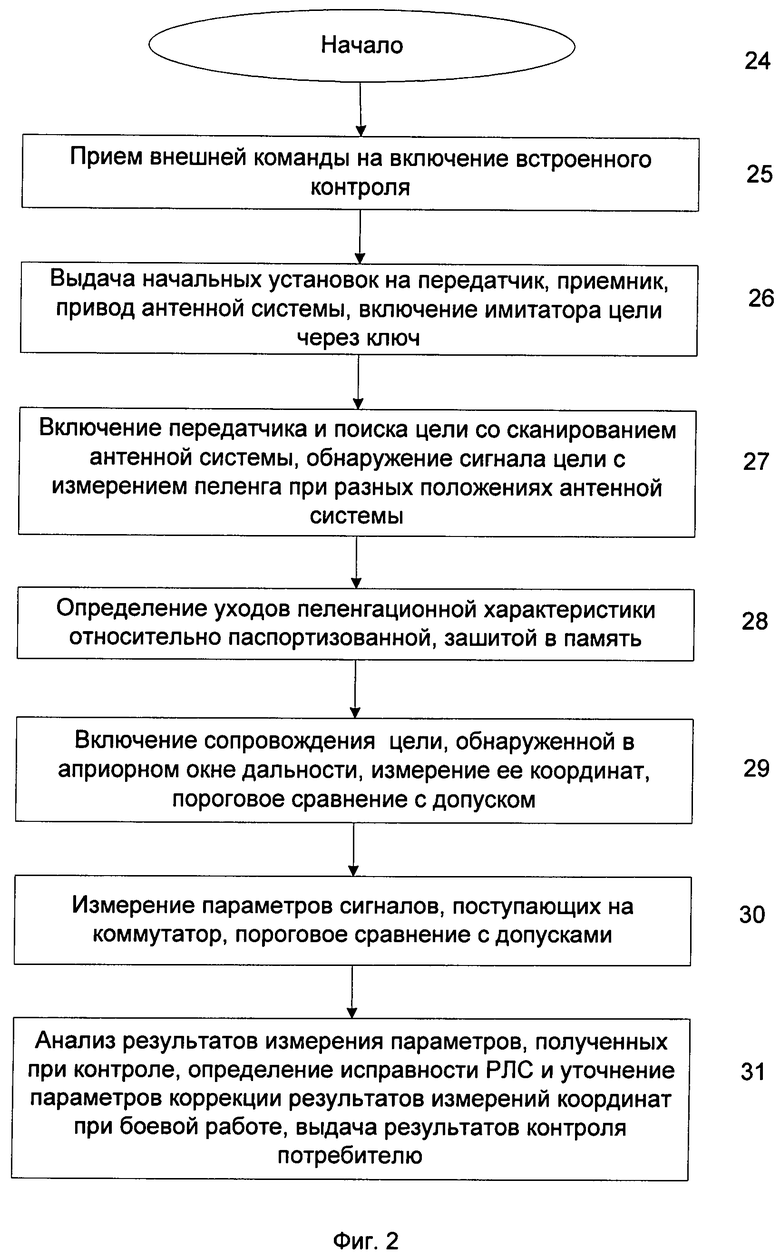
Работа системы в режиме встроенного контроля и калибровки инициируется по внешней команде, приходящей на шестой вход-выход процессора 23, и поясняется фиг.2. По программе, заложенной в память, процессор 23 через четвертый вход-выход управляет как работой узлов РЛС, так и процессом встроенного контроля по циклограмме, зашитой в память. Началом встроенного контроля является выдача процессором 23 начальных установок на передатчик 22, моноимпульсный приемник 19 и антенную систему 13, после этого через ключ 16 включается подача СВЧ импульсов передатчика на имитатор цели 1 (фиг.2 поз.26). Далее производится включение передатчика 22, поиск цели со сканированием антенной системы 13, работа по обнаружению сигнала цели с измерением и записью пеленга при разных положениях антенной системы (фиг.2 поз.27). Параллельно согласно временной циклограмме встроенного контроля процессор 23 через четвертый вход-выход по циклограмме контроля управляет выдачей контролируемых напряжений передатчиком 22, приемником 19 на коммутатор 20, с выхода которого на пятый вход процессора 23 поступают контролируемые сигналы со второго выхода передатчика 22, с четвертого выхода приемника 19 и с детектора 21. Все контролируемые напряжения, поступающие на пятый вход процессора 23, оцифровываются и записываются в расчетных временных точках.
По результатам оценки пеленга имитируемого сигнала при разных положениях сканирующей антенной системы 13 процессор 23 производит вычисление пеленгационной характеристики антенной системы 13 и определение ее уходов относительно паспортизованной, зашитой в память (фиг.2 поз.28). Далее процессор 23 после обнаружения производит захват и сопровождение цели, измерение координат, сравнение измеренных координат с допуском (фиг.2 поз.29), сравнение результатов записи контролируемых напряжений с допуском (фиг.2 поз.30). По результатам сравнения всех контролируемых при встроенном контроле параметров с допусками процессор 23 принимает решение о исправности проверяемой РЛС. Кроме того, по результатам сравнения пеленгационной характеристики с значениями, записанными в память, процессор 23 определяет смещение калибровки измерений по углу и уточняет параметры коррекции сигналов моноимпульсного приемника и результатов измерений координат цели при боевой работе (фиг.2 поз.31). Результаты встроенного контроля выводятся потребителю через шестой интерфейсный вход-выход процессора 23.
Имитация сигнала цели в режиме встроенного контроля производится следующим образом. Импульсный СВЧ сигнал передатчика 22 через последовательно включенные второй 18 и первый 17 направленные ответвители и открытый ключ 16 выводится на имитатор цели 1, входом которого является первый вход циркулятора 3. В имитаторе цели 1 импульсный СВЧ сигнал через первый циркулятор 3 поступает на первый сумматор 4, где суммируется с непрерывным сигналом гетеродина 6, прошедшего первый вентиль 5. С третьего входа-выхода первого сумматора 4 полученная сумма поступает на смеситель 8, где входной СВЧ сигнал переносится на промежуточную частоту, равную разности несущей частоты входного сигнала и гетеродинной. Сигнал промежуточной частоты с второго входа-выхода поступает на рециркулятор, состоящий из второго сумматора 9, линии задержки 10 и усилителя 12. В результате рециркуляции на первом входе-выходе второго сумматора 9 получают пачку затухающих импульсов на промежуточной частоте, поступающую на второй вход-выход смесителя 8. В смесителе 8 производится перенос задержанных импульсов на несущую частоту, равную сумме промежуточной частоты и гетеродинной. Задержанные СВЧ импульсы с первого входа-выхода смесителя 8 через первый сумматор 4, циркулятор 3, второй вентиль 7 поступают на тестерную антенну 11 и излучаются в сторону антенной системы 13.
Высокая полнота встроенного контроля обеспечивается бортовым имитатором цели 1, позволяющим на земле и во время полета охватить контролем всю РЛС 2, включая антенну 13, передатчик 22, приемник 19 и процессор 23. В прототипе требуемая полнота контроля обеспечивается внешним устройством контроля, включающим имитатор цели, только в наземных условиях.
Результаты встроенного контроля перед полетом и во время полета позволяют автоматически определять исправность РЛС, уходы пеленгационной характеристики и учитывать их во время боевой работы, что позволяет повысить вероятность выполнения боевой задачи.
Использование радиолинии только для передачи имитируемого сигнала цели на РЛС позволяет уменьшить габарит тестерной антенны до размеров, не снижающих усиление антенной системы и не вносящих искажения ее пеленгационной характеристики при разных углах сканирования.
Изготовление и испытания системы встроенного контроля и калибровки подтвердили ее эффективность, возможность определения и учета уходов пеленгационной характеристики моноимпульсной РЛС при боевой работе.
Пользуясь сведениями, представленными в материалах заявки, устройство может быть изготовлено по существующей, известной в радиопромышленности технологии, на базе известных комплектующих изделий и использовано в моноимпульсных импульсно-доплеровских РЛС для навигации летательных аппаратов.
ЛИТЕРАТУРА
1. Патент США №5808578 от 15.09.98. "Guided missile calibration method".
2. Патент США №7719462 от 18.05.10. "Time of light radar calibration system".
3. Патент России №2205441 от 27.05.03. "Комплекс для проверки бортовых систем беспилотного летательного аппарата".
4. Л.Г.Малорацкий, Л.Р.Явич. "Проектирование и расчет СВЧ элементов на полосковых линиях". - М.: Советское Радио, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| УСТРОЙСТВО ВВОДА СВЧ СИГНАЛОВ ИМИТАТОРА ЦЕЛИ И ПОМЕХ В СОСТАВЕ БРЛС С КОМПЕНСАЦИОННЫМ КАНАЛОМ ПОМЕХОЗАЩИТЫ | 2000 |
|
RU2207587C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| ДВУХДИАПАЗОННЫЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОЛОКАТОР | 2004 |
|
RU2273861C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
Изобретение относится к радиолокации. Достигаемый технический результат - контроль узлов моноимпульсной радиолокационной станции (МРЛС) при эксплуатации, проверка калибровки, позволяющая учесть ее уходы перед выполнением боевой работы. Указанный результат достигается тем, что от МРЛС при контроле выводится часть мощности зондирующего сигнала, которая поступает на имитатор сигнала цели и через циркулятор поступает на сумматор с гетеродинным сигналом имитатора, суммарный сигнал поступает на смеситель, переносится на промежуточную частоту и поступает на схему рециркуляции, построенную на последовательно соединенных втором сумматоре и линии задержки, где затухающая пачка задержанных импульсов возвращается на смеситель, где с помощью гетеродинного сигнала переносится на несущую частоту, проходит через циркулятор на последовательно соединенные вентиль, тестерную антенну и радиоканал связи на антенну МРЛС. Процессор МРЛС осуществляет управление процессом встроенного контроля в режимах поиска, захвата и сопровождения сигнала, по результатам поиска цели со сканированием антенной системы производится измерение пеленгационной характеристики, по результатам захвата и сопровождения определяются координаты имитируемой цели, контролируемые параметры передатчика, приемника и сигнала детектора, сравнением контролируемых параметров с паспортными данными процессор определяет исправность МРЛС и уходы калибровки, которые запоминает и учитывает при измерениях координат целей при боевой работе. 1 з.п. ф-лы, 2 ил.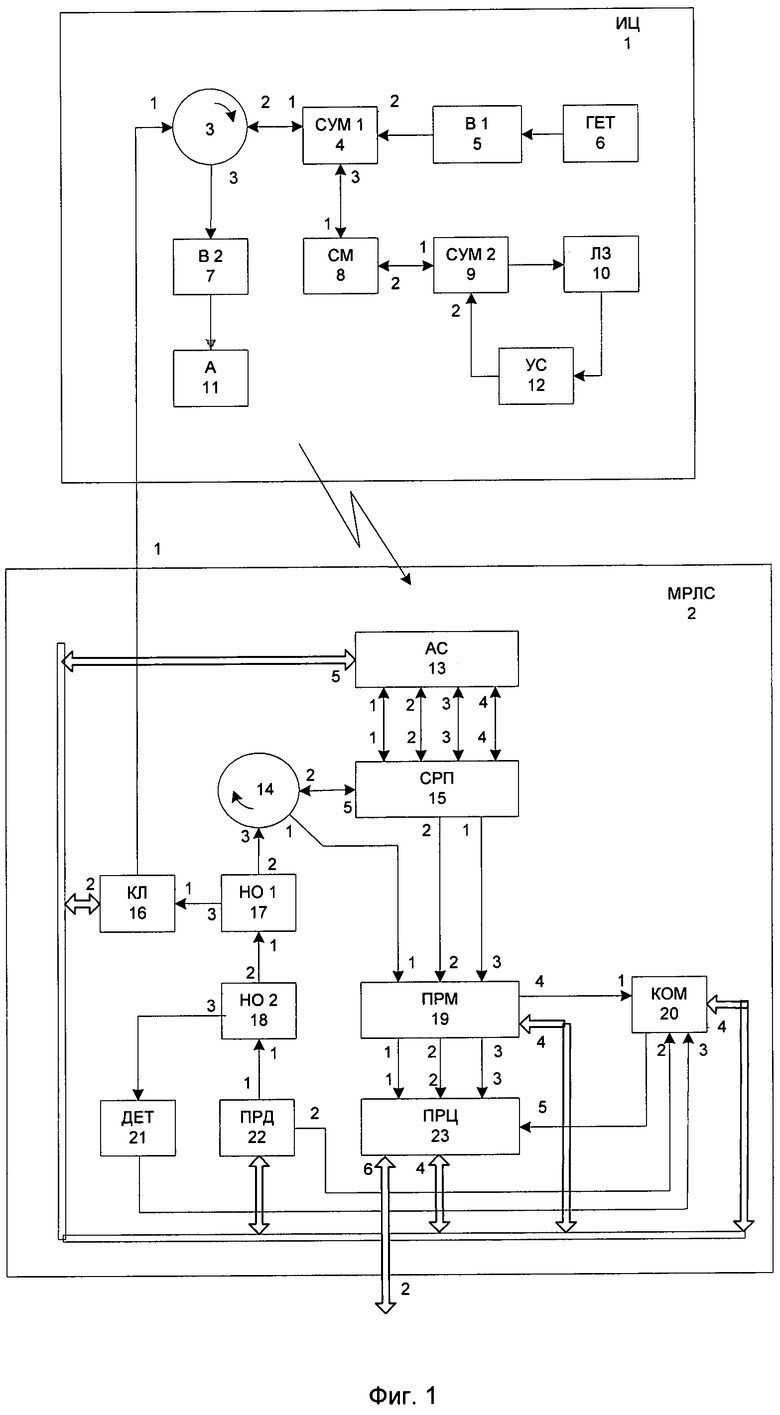
1. Система встроенного контроля и калибровки, содержащая моноимпульсную РЛС, первый выход которой является выходом импульсного сверхвысокочастотного сигнала передатчика, соединен с входом имитатора сигнала цели, в котором установлены тестерная антенна, являющаяся выходом имитатора цели, связанная радиоканалом с антенной моноимпульсной РЛС, последовательно соединенные линия задержки и усилитель, первый циркулятор, являющийся входом имитатора цели, и смеситель, в моноимпульсной РЛС с первого по четвертый входы-выходы антенной системы соединены с одноименными входами-выходами суммарно-разностного преобразователя, пятый вход-выход которого через второй циркулятор соединен с первым входом моноимпульсного приемника, первый и второй выходы суммарно-разностного преобразователя соединены с третьим и вторым входами моноимпульсного приемника соответственно, первый, второй и третий выходы моноимпульсного приемника соединены с одноименными входами процессора, четвертый вход-выход которого соединен с входом-выходом передатчика, четвертым входом-выходом моноимпульсного приемника, пятым входом-выходом антенной системы, процессор управляет параметрами сигнала передатчика и угловым положением антенной системы, настройкой моноимпульсного приемника, выполняет оцифровку и цифровую обработку сигнала на выходе моноимпульсного приемника с обнаружением, захватом, сопровождением, измерением и выдачей координат целей потребителю, шестой вход-выход процессора является вторым интерфейсным входом-выходом моноимпульсной РЛС, по которому вводятся команды управления, исходные данные для проведения встроенного контроля и выводятся потребителю результаты боевой работы и контроля, отличающаяся тем, что в имитатор цели введены второй вентиль и второй сумматор, последовательно включенные гетеродин, первый вентиль и первый сумматор, в моноимпульсную РЛС введены последовательно соединенные второй направленный ответвитель, детектор и коммутатор, последовательно соединенные первый направленный ответвитель и ключ, при этом в имитаторе цели первый вход-выход первого сумматора через последовательно соединенные первый циркулятор и второй вентиль соединен с входом тестерной антенны, первый вход-выход смесителя соединен с третьим входом-выходом первого сумматора, второй вход-выход смесителя соединен с первым входом-выходом второго сумматора, выход которого соединен с входом линии задержки, выход усилителя соединен с вторым входом второго сумматора, в моноимпульсной РЛС первый выход передатчика через последовательно включенные второй и первый направленные ответвители соединен с третьим входом второго циркулятора, второй выход передатчика соединен с одноименным входом коммутатора, выход которого соединен с пятым входом процессора, четвертый выход моноимпульсного приемника соединен с первым входом коммутатора, четвертый вход-выход коммутатора соединен с вторым входом-выходом ключа и четвертым входом-выходом процессора, управляющего процессом встроенного контроля в режимах поиска, захвата и сопровождения сигнала, по результатам поиска цели со сканированием антенной системы, определяющего пеленгационную характеристику РЛС, по результатам захвата и сопровождения, определяющего ошибки измерения координат имитируемой цели, контролируемые параметры передатчика, приемника и сигнала детектора, сравнивающего значения контролируемых параметров с допусками, записанную в память, определяющего по результатам сравнения исправность РЛС и уходы калибровки, которые запоминает и учитывает при измерениях координат целей при боевой работе, выход ключа является первым выходом моноимпульсной РЛС.
2. Система встроенного контроля и калибровки по п.1, отличающаяся тем, что тестерная антенна находится в ближней зоне и на продольной оси антенной системы моноимпульсной РЛС.
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАТОРА И РАДИОЛОКАТОР | 1996 |
|
RU2103706C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭТАЛОННЫХ ВЕЛИЧИН ЭКСПЛУАТАЦИОННЫХ ХАРАКТЕРИСТИК И НАВИГАЦИОННЫХ ПАРАМЕТРОВ СУДНА В ПРАКТИЧЕСКИХ РЕЙСАХ ДЛЯ ОБЕСПЕЧЕНИЯ КОНТРОЛЯ ЗА НИМ В УСЛОВИЯХ АВТОНОМНОЙ БОРТОВОЙ СИСТЕМЫ ЕДИНСТВА ИЗМЕРЕНИЙ РАЗДЕЛЬНОГО ВЕДЕНИЯ СЧИСЛЕНИЯ СУДНА ОТНОСИТЕЛЬНО ВОДЫ И ОТНОСИТЕЛЬНО ГРУНТА | 1994 |
|
RU2063114C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| US 6819285 B1, 16.11.2004 | |||
| JP 2001116834 A, 27.04.2001 | |||
| КОРПУСНЫЙ КУМУЛЯТИВНЫЙ ПЕРФОРАТОР МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ | 1998 |
|
RU2166618C2 |
| US 20050190099 A1, 01.09.2005. | |||

