Изобретение относится к технике судоподъемно-спасательного дела, преимущественно к технологии доставания из больших глубин судов, надводных кораблей, подводных лодок и других крупных объектов.
В настоящее время известны различные способы подъема затонувших объектов [1-5], но наибольшее практическое применение нашли только два из них:
1. Механический способ, в основу которого положено использование грузоподъемных машин и механизмов, преимущественно плавучих грузоподъемных кранов, с помощью которых создается усилие, достаточное для извлечения затонувшего объекта на поверхность акватории. Варианты использования данного способа в основном определяются техническими решениями, обеспечивающими захват затонувшего объекта.
Как правило, при реализации этого способа судоподъема под затонувшим объектом заводят специальные стропы через заранее промытые под ним тоннели; концы стропов закладывают на гаки грузоподъемных устройств плавучих кранов, с помощью которых поднимают объект на поверхность акватории.
В последнее время, учитывая большую сложность и трудоемкость создания упомянутых тоннелей под затонувшим объектом, особенно на больших глубинах (более 100 м), для захвата объекта стали применять погружаемую платформу, оборудованную мощными захватами в виде клещей, внутренний диаметр которых равен внешнему диаметру затонувшего объекта, например затонувшей подводной лодки. Эху платформу с затонувшим объектом поднимают грузоподъемными машинами посредством грузонесущих связей: тросов, канатов, цепей, свинченных между собой труб и т.д.
2. Способ с использованием сжатого воздуха. При этом возможны два варианта использования данного способа. Первый вариант: когда в качестве подъемной силы используют предварительно затопленные продуваемые сжатым воздухом судоподъемные понтоны, после их остроповки на затонувшем объекте. Второй вариант: когда затонувший объект герметизируется с помощью подводного бетонирования, сварки, а также применения мягких или жестких пластырей; затем корпус данного объекта продувается сжатым воздухом от компрессоров, установленных на спасательном судне. Данный способ является классическим при подъеме опрокинувшихся затонувших кораблей большого водоизмещения.
Основными недостатками известных способов являются ограничения как по весу затонувших объектов ввиду ограниченности грузоподъемности плавучих кранов (для современной техники примерно 12000 т), так и по предельной глубине судоподъемной операции. Эта глубина до последнего времени ограничивалась, по крайней мере, для крупных объектов предельной глубиной работы водолазов (в обычном снаряжении - 60 м). Для погружения на большую глубину требуется специальное водолазное оборудование, однако и в этом случае до настоящего времени практическая работа водолазов не выполнялась на глубинах более 300 м. Поэтому судоподъемные операции на больших глубинах стали выполнять с помощью дистанционно управляемых механических захватов, устанавливаемых на погружаемой платформе.
Однако такие захваты имеют также ряд существенных недостатков:
- весьма значительным собственным весом, особенно при подъеме крупных объектов, например подводных лодок, водоизмещение которых достигает 20 и более тысяч тонн.
- сложностью автоматического захвата, в том числе достижения оптимального усилия захватов: при недостаточном усилии в процессе подъема затонувший объект может выскользнуть из захватов, а при чрезмерном усилии объект может быть раздавлен захватами, что не менее опасно, так как по бортам, например, подводной лодки часто расположены контейнеры с ракетно-ядерным оружием.
Заметным прорывом в судоподъемном деле стало изобретение криогенного способа подъема затонувших объектов [1, 5 и 6]. При этом техническом решении для захвата и создания необходимой подъемной (Архимедовой) силы используют криогенные жидкости, которые при контакте с водой газифицируются, резко увеличивая свой объем, и одновременно поглощают из окружающей среды большое количество теплоты.
В результате чего газифицированный криоагент может быть эффективно использован для вытеснения воды из внутреннего объема затонувшего объекта, а также из судоподъемных понтонов. Одновременно за счет низкой температуры кипения криогенных жидкостей (например, для жидкого азота эта температура составляет около минус 196°С) происходит ледяной захват затонувшего объекта путем смораживания наружных поверхностей этого объекта с судоподъемным устройством (понтонами).
Этот способ позволяет поднимать затонувшие объекты практически неограниченного веса и с практически любых глубин, особенно он эффективен до глубин 2000-2500 м, когда в качестве криоагента может быть использовано достаточно дешевое и безопасное вещество - жидкий азот.
Однако при использовании данного способа судоподъема происходит неуправляемое всплытие затонувшего объекта, со значительными динамическими воздействиями, особенно в момент выхода этого объекта на поверхность водной акватории. В отдельных случаях, например при подъеме взрывоопасных предметов, какие-либо динамические воздействия на поднимаемый со дна океана объект недопустимы.
В таких случаях может быть применен способ подъема затонувшего объекта с комплексным использованием механического и криогенного способов судоподъема [1]. Согласно этому известному способу, затонувший объект сначала герметизируют и частично продувают, снижая его вес в воде (до достижения нулевой плавучести), затем этот объект поднимают на поверхность механическими грузоподъемными устройствами посредством грузонесущих связей, например тросов.
Данное техническое решение [1] принято в качестве наиболее близкого аналога заявленного способа. Существенным недостатком указанного аналога является то, что, несмотря на значительное снижение при этом разрывных усилий, действующих на грузонесущие связи (за счет снижения веса затонувшего объекта в воде), нагрузка на эти же грузонесущие связи, обусловленная действием динамических сил, остается практически неизменной, поскольку масса затонувшего объекта в процессе его продувки не меняется. Количественно согласно второму основному закону динамики эта нагрузка (сила) равна произведению массы затонувшего объекта на ускорение, с которым этот объект движется.
Масса затонувших тел равна их водоизмещению и достигает, например, для крупных современных кораблей многих десятков тысяч тонн, а величина ускорения определяется различными явлениями, сопровождающими судоподъемную операцию. К таким явлениям, в первую очередь, следует отнести сцепление (присос) между грунтом и корпусом затонувшего объекта, а также вертикальное перемещение спасательного судна под воздействием волн. Так, например, для глины вязкой плотной коэффициент силы присоса достигает 0,25-0,45 от веса затонувшего объекта [4].
Таким образом, фактически в процессе судоподъемной операции приходится дело иметь с отрывным весом (подъемным усилием), равным сумме подъемного веса и отрывного усилия. Для крупных заиленных объектов отрывной вес достигает значительных абсолютных значений, даже если предварительной продувкой снизить вес в воде затонувшего объекта до нуля. Система, состоящая из спасательного судна (плавучего крана), грузонесущих связей и затонувшего объекта, должна рассматриваться как колебательный контур, с трудно предсказуемыми параметрами (частотой и амплитудой) ввиду неопределенности ряда исходных данных для их расчета.
Особенно опасны динамические усилия, вызванные резонансными явлениями, на крановое оборудование и грузонесущие связи, которые нередко в процессе подъема затонувшего объекта обрываются.
Из практики судоподъемного дела известен случай, когда не удалось поднять спасательную камеру АПЛ "Комсомолец". В результате динамического воздействия набежавшей крупной волны на спасательное судно трос, поднимающий спасательную камеру, оборвался, хотя его прочность в несколько раз превышала вес упомянутой камеры. В результате чего эта камера снова оказалась на дне океана и до сих пор там находится. Многомиллионные затраты оказались напрасными.
Новизна заявленного способа состоит в том, что для повышения эффективности судоподъемной операции, в том числе снижения динамических нагрузок на грузонесущие связи, а также обеспечения заданного крена и дифферента затонувшего объекта в процессе его подъема на поверхность акватории спасательное судно выполняют в виде катамарана, каждый из корпусов из которою снабжают множеством малоинерционных лебедок с гидравлическим турбинным приводом, которые распределяют вдоль каждого корпуса катамарана, а также питающими эти приводы гидронасосами, распределительными трубопроводами с запорно-регулирующей арматурой. Общее число упомянутых лебедок с гибкими связями принимают равным частному от деления усилия, необходимого для подъема затонувшего объекта, на предельную грузоподъемность отдельной гибкой связи.
Для того чтобы обеспечить требуемый крен и дифферент затонувшего объекта в процессе судоподъемной операции, на затонувшем объекте устанавливают датчики крена и дифферента, которые через электронно-вычислительную машину и приводы запорно-регулирующей арматуры регулируют давление воды, подаваемой на гидравлический привод лебедок, обеспечивая требуемое натяжение каждой гибкой связи.
Предложенный способ использует эффект, который на себе испытал герой романа Д.Свифта "Путешествие Лемюэля Гулливера", когда он после кораблекрушения и спасения проснулся в стране лилипутов, оказавшись прочно привязанным множеством тонких шнурков. Несмотря на ничтожную прочность каждого шнурка, гигант не мог даже пошевелиться. Здесь наглядно показан эффект перехода количества в качество. Однако такой эффект возможен только в том случае, если сила натяжения каждой связи не будет превышать ее разрывного усилия.
Последнее условия будет соблюдаться, если сила натяжения каждой связи будет примерно одинаковая, а общая нагрузка на все связи будет меньше суммарной прочности всех связей.
Учитывая, что прочность отдельно взятой гибкой грузонесущей связи весьма незначительна, то ее разрыв (или отказ отдельной лебедки) очень опасно для системы в целом, так как в данном случае немедленно автоматически происходит перераспределение, с ее увеличением, нагрузки на остальные связи. При этом разрыв отдельных грузонесущих связей может привести к лавинообразному разрушению системы в целом.
Таким образом, главное условие успешного проведения судоподъемной операции с применением заявленного способа состоит в исключении значительного перераспределения нагрузки между отдельными грузонесущими связями и исключении их разрыва.
Данное условие выполняется применением подъемных устройств в виде множества лебедок с гидротурбинным приводом. Такой привод в отличие от электрических может снижать число оборотов, вплоть до полной остановки и даже вращения в обратную сторону, без выхода его из строя. При этом момент вращения лебедки увеличивается до строго определенной величины. В данном случае прочность отельной грузонесущей связи может быть выбрана таким образом, чтобы она не разрушалась при самых неблагоприятных обстоятельствах.
Увеличивая число лебедок и соответственно гибких грузонесущих связей, имеется возможность, с одной стороны, значительно уменьшить диаметр и вес каждой связи, а следовательно, упростить задачу по присоединению этой связи к затонувшему объекту.
С другой стороны, увеличивая число лебедок и гибких связей, можно практически неограниченно увеличивать суммарную грузоподъемность спасательного судна. Кстати, при условии герметизации и предварительной продувки затонувшего объекта водоизмещение спасательного судна может быть существенно ниже водоизмещения затонувшего объекта.
Придание спасательному судну катамаранного вида позволяет взаимно компенсировать опрокидывающие моменты в сторону его внутренних бортов при натяжении гибких грузонесущих связей.
Создание больших подъемных усилий за счет увеличения числа лебедок позволяет отказаться от громоздких крановых устройств, которые имеют большую парусность, что существенно снижает мореходные качества известных спасательных средств.
Предлагаемое техническое решение позволяет обеспечить хорошие аэродинамические свойства корпуса спасательного судна и тем самым обеспечить его высокую скорость, что, например, для случая спасения личного состава аварийных подводных лодок имеет решающее значение.
Кроме того, благодаря использованию множества гибких связей, равномерно распределенных вдоль корпуса затонувшего объекта, а также сравнительно незначительному натяжению каждой связи появляется возможность использовать для их крепления даже слабые конструкции на затонувшем объекте. Для этих целей на затонувшем объекте могут использоваться инвентарные отверстия различного назначения или специально создаваемые отверстия выше ватерлинии с помощью, например, малых кумулятивных зарядов. Для подводных лодок с живым экипажем для этих целей может быть использован ее внешний легкий корпус.
Наконец, такой захват затонувшего объекта исключает сколько-нибудь значительные изгибные усилия в его корпусе, которые при известных способах судоподъема бывают весьма значительными. Известны случаи из практики судоподъема, когда в результате использования местных механических захватов затонувший объект во время подъема разламывался на две части (Операция "Дженифер", подъем американцами советской подводной лодки К-159 в 1974 г.).
Указанные новые признаки не выявлены из существующего уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "изобретательский уровень".
Перечисленные новые признаки в совокупности позволяют существенно повысить безопасность к технико-экономические показатели судоподъемной операции за счет обеспечения управляемости скорости подъема, обеспечения заданного крена и дифферента затонувшего объекта.
Изобретение иллюстрируется следующим примером устройства, реализующим заявленный способ. В данном примере в качестве затонувшего объекта принята подводная лодка 1, которая соединена с помощью тросов 2, пропущенных через блоки 3, со спасательным судном 4, выполненным в виде катамарана. На каждом корпусе такого катамарана установлены малоинерционные лебедки 5, каждая из которых имеет гидравлический турбинный привод 6, на который подается под давлением вода по трубопроводу 7 от гидронасоса 8 через запорно-регулирующую арматуру (задвижки) 9 а, б; 10 а, б; и 11 а, б. На чертеже условно изображены только четыре лебедки, при выполнении реальной судоподъемной операции по извлечению со дна океана крупного объекта число таких лебедок может исчисляться десятками и даже сотнями штук.
Способ осуществляется следующим образом. Спасательное судно 4 устанавливают непосредственно над затонувшей подводной лодкой 1 и с помощью тросов 3 производят захват последней. Вариант захвата, главным образом, зависит от глубины, на которой затонула подводная лодка 1, веса, а также от стесни ее разгерметизации [1-6]. Допустим, что лодка, получив пробоину, затонула на глубине до 100 м. На этой глубине возможна работа водолазов. В заданных условиях осуществляют механический захват подводной лодки 1 через специально созданные отверстия в легком корпусе. Чтобы уменьшить вес подводной лодки 1 в воде, пробоину в ее прочном корпусе герметизируют, например, криогенным пластырем с помощью жидкого азота, затем этот корпус продувают сжатым воздухом или отработанным газообразным азотом. Когда плавучесть подводной лодки 1 будет близка к нулю, продувку прекращают и включают гидронасосы 8, открывают задвижки 9, 10 и 11, через которые вода под давлением по трубопроводам 7а и 7б подается на гидравлические турбинные приводы 6 лебедок 5, вращая последние. Тросы 2, наматываясь на барабаны лебедок 5, создают отрывное усилие на подводную лодку 1; последняя, преодолевая присос, отрывается от грунта. В момент отрыва (увеличение натяжения тросов) скорость вращения гидравлических турбинных приводов 6 лебедок 5 уменьшается, но после отрыва подводной лодки скорость вращения лебедок стремится к увеличению, однако, закрывая задвижки 9а и 9б, уменьшают давление в трубопроводах 7а, 7б, снижая скорость вращения лебедок 5, и, следовательно, скорость подъема подводной лодки 1 до допустимого значения. При возникновении недопустимого крена, например, на левую сторону прикрывают задвижку 9б, давление в трубопроводе 7б снижается и все лебедки 5 правого корпуса катамарана уменьшают скорость вращения по сравнению со скоростью вращения лебедок 5 левого корпуса. Уменьшение дифферента осуществляется аналогичным образом с помощью задвижек 10а, 10б и 11а, 11б.
В процессе подъема сжатый воздух (или азот) будет расширяться, поэтому для этого должен быть предусмотрен специальный дренажный трубопровод для удаления за борт избыточного газа, иначе может быть начат самопроизвольный неуправляемый подъем подводной лодки 1. В непосредственной близости подводной лодки 1 от поверхности этот дренажный трубопровод закрывают, указанную подводную лодку полностью продувают и она всплывает на поверхность самостоятельно.
Далее продувную лодку 1 отсоединяют от грузонесущих связей 2, с помощью буксиров транспортируют и устанавливают в док для ремонта или утилизации.
Источники информации
1. Патент РФ №2210519, МКИ 7 В 63 С 7/14. Способ подъема затонувшего объекта / Седых Н.А. - прототип.
2. Авторское свидетельство №109222 СССР, МКИ 63 B, 14. Способ подъема затонувших судов. / Бирюков Н.Н.
3. Джозеф Н.Горз. Подъем затонувших кораблей. - Л.: Судостроение, 1978.
4. Молчанов В.А. Возвращение из глубин. - Л.: Судостроение, 1983.
5. Авторское свидетельство №1785948 СССР, МКИ В 63 С 7/06. Устройство для подъема затонувшего судна. / Седых Н.А. и Седых А.Н.
6. Патент №2009954 РФ, МКИ В 36 С 7/06. Устройство для подъема затонувших объектов. / Седых Н.А. и Седых А.Н.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2001 |
|
RU2210519C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2002 |
|
RU2229418C2 |
| СПОСОБ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ ОБЪЕКТОВ | 2009 |
|
RU2417921C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2000 |
|
RU2192985C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| СПОСОБ СПАСЕНИЯ И ПОДЪЕМА СУДОВ И КОМПЛЕКС СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2299831C2 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
Изобретение относится к технике судоподъемно-спасательного дела, преимущественно к технологии доставания из больших глубин судов, надводных кораблей, подводных лодок и других крупных объектов. Способ подъема затонувшего объекта заключается в соединении этого объекта посредством гибких связей с подъемным устройством спасательного судна и в последующем выбирании упомянутых связей до тех пор, пока затонувший объект не будет извлечен из воды. Спасательное судно выполнено в виде катамарана, на каждом корпусе которого установлены лебедки с гидравлическим турбинным приводом и питающий их посредством трубопроводов с запорно-регулирующей арматурой гидронасос. Эти лебедки распределены равномерно вдоль каждого корпуса катамарана, а гибкие связи, соединяющие лебедки с затонувшим объектом, пропущены через внутренние борта посредством блоков. При этом общее число лебедок и гибких связей принимают равным частному от деления усилия, необходимого для подъема затонувшего объекта, на предельную грузоподъемность отдельной гибкой связи. Технический результат - исключение сколько-нибудь значительных изгибных усилий в корпусе поднимаемого объекта. 1 з.п. ф-лы, 1 ил.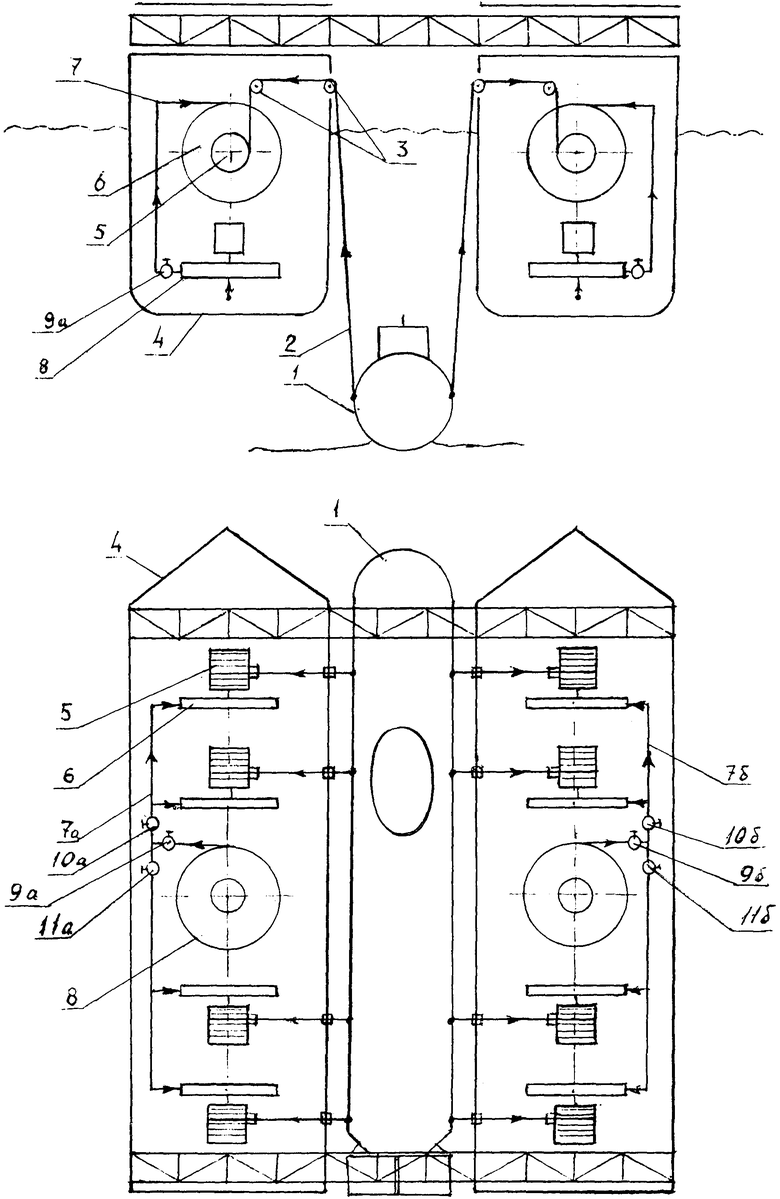
| СПОСОБ ПРОИЗВОДСТВА ТРУБНЫХ МЕТАЛЛОИЗДЕЛИЙ ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИЕЙ | 2016 |
|
RU2622552C1 |
| US 1412202 А, 04.11.1922 | |||
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2043257C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ВЫПЕЧКИ ХЛЕБА | 2013 |
|
RU2561926C2 |

