Изобретение относится к судоподъемным работам.
Известен способ подъема затонувшего объекта, реализуемый при работе системы для подъема затонувшего объекта), заключающийся в том, что тросовые захваты опускают с носовой и кормовой частей палубы надводного судна путем разматывания каждого неразрывного троса с соответствующей пары подъемных барабанов, после чего каждый тросовый захват заводят при помощи подводного самоходного аппарата под затонувший объект, осуществляют предварительный натяг тросов и производят выборку последних. При этом упомянутая система содержит вспомогательный подводный самоходный аппарат и надводное с грузовой палубой судно катамаранного типа, на корпусах которого вдоль судна попарно установлены грузоподъемные барабаны, при этом на каждой паре барабанов запасован неразрывный трос с образованием захвата.
Недостатком упомянутых способа подъема затонувшего объекта и системы для его реализации является низкая эффективность при подъеме затонувшего объекта с большой глубины, вызванной большим объемом подводно-технических работ.
Целью изобретения является повышение эффективности проведения подъемных работ.
Указанная цель достигается тем, что в способе подъема затонувшего объекта, заключающемся в том, что тросовые захваты опускаются с носовой и кормовой частей палубы надводного судна путем разматывания каждого неразрывного троса с соответствующей пары подъемных барабанов, после чего каждый тросовый захват заводят при помощи подводного самоходного аппарата под затонувший объект, осуществляют предварительный натяг тросов и производят выборку последних, каждый тросовый захват формируют на палубе надводного судна в виде самозатягивающейся тросовой петли, для сохранения необходимого размера которой осуществляют ее зажим и надевают предохранитель для обеспечения самозатягивания петли на корпусе затонувшего объекта, при этом предварительный натяг троса осуществляют с одновременным обжимом корпуса затонувшего объекта. А в системе для подъема затонувшего объекта, содержащей вспомогательный подводный самоходный аппарат и надводное с грузовой палубой судно катамаранного типа, на корпусах которого вдоль судна попарно установлены грузоподъемные барабаны, при этом на каждой паре барабанов запасованы неразрывный трос с образованием захвата, над каждой парой барабанов установлена дополнительная пара барабанов с тросовым захватом, при этом вал каждого барабана, установленного на одном корпусе судна, параллелен в вертикальной плоскости валу вышерасположенного над ним барабана и параллелен в горизонтальной плоскости валу барабана, расположенного на другом корпусе судна, причем тросовый захват каждой пары барабанов выполнен в виде самозатягивающейся петли с зажимом и предохранителем для ее самозатягивания. Кроме того, каждый тросовый захват может быть выполнен из силикатных нитей орлона.
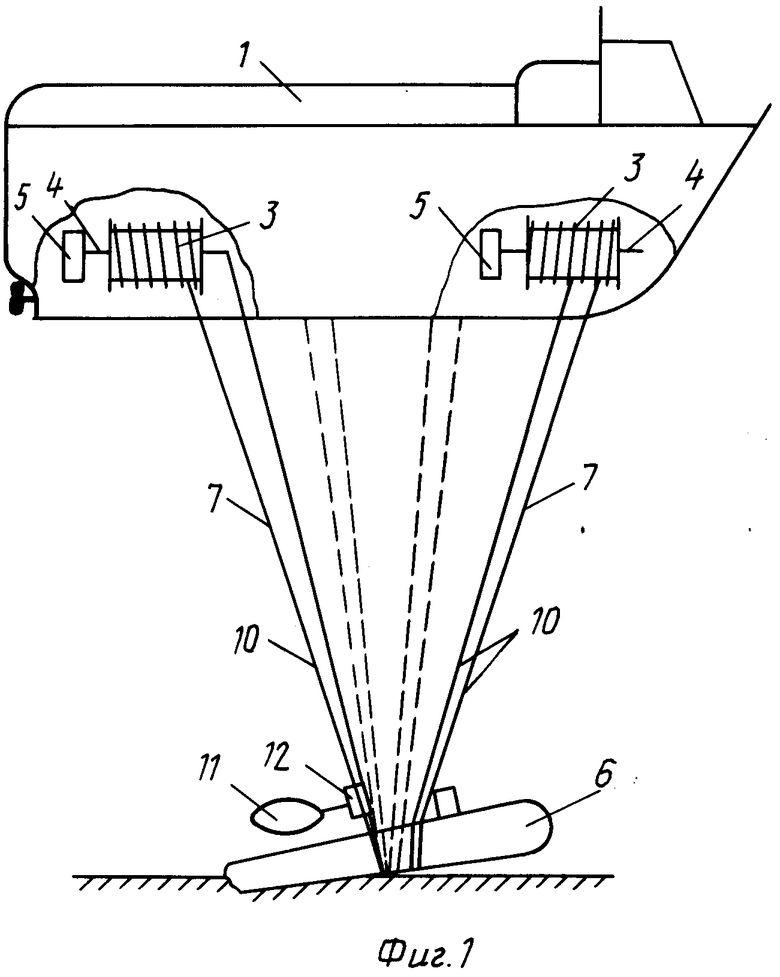
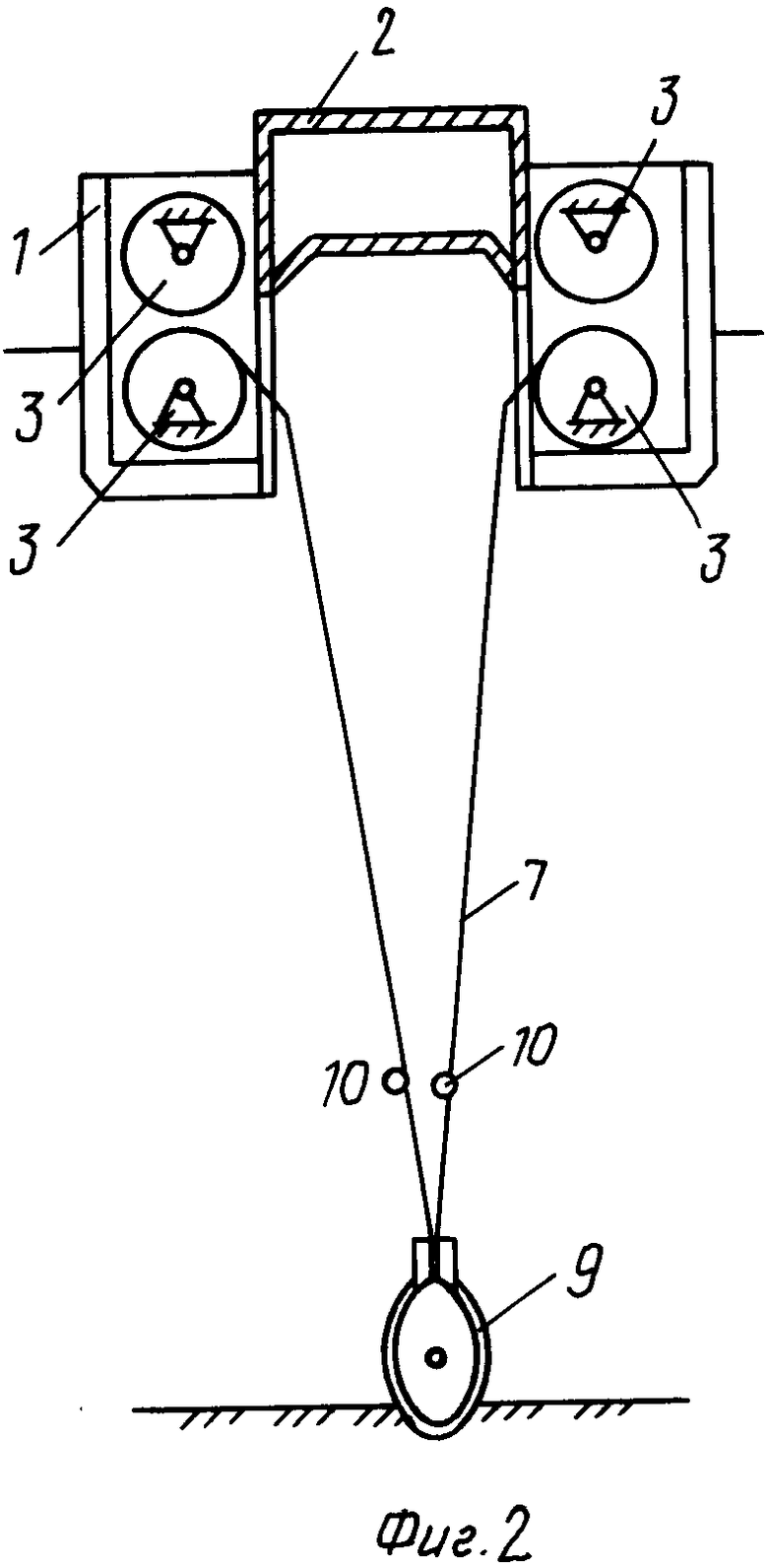
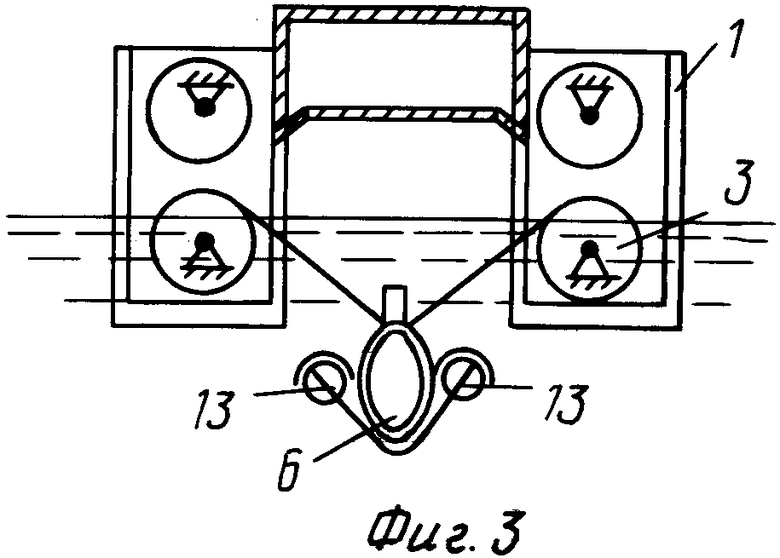
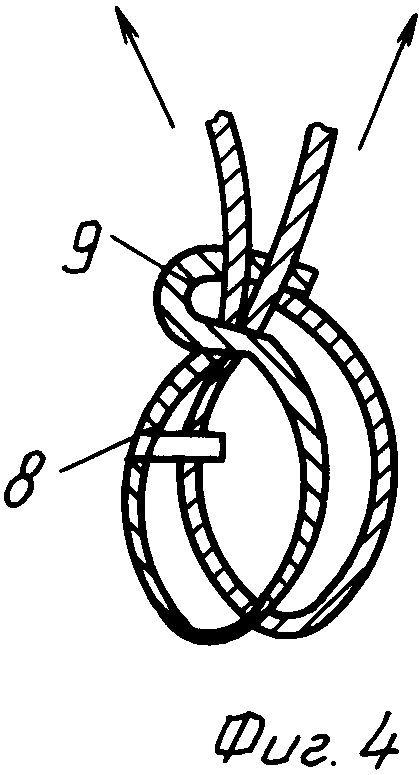
На фиг. 1 изображена система для подъема подводного объекта, общий вид; на фиг.2 поперечный разрез надводного судна при застропке затонувшего объекта; на фиг. 3 то же, при подъеме затонувшего объекта; на фиг.4 тросовый захват.
Способ реализуется при работе системы для подъема затонувшего объекта, содержащей надводное судно 1, выполненное в виде катамарана с грузовой палубой 2, грузоподъемными барабанами 3, попарно установленными на валах 4 вдоль корпусов судна, и их приводы 5.
Вал каждого грузоподъемного барабана, установленного на одном из корпусов судна, параллелен в вертикальной плоскости валу вышерасположенного грузоподъемного барабана и параллелен в горизонтальной плоскости валу другого грузоподъемного барабана, расположенного на другом корпусе судна. Грузоподъемные барабаны 3 выполнены с отсеками, заполняемыми при подъеме затонувшего объекта, например подводной лодки 6, попеременно водой. На каждой паре расположенный напротив друг друга на разных корпусах судна барабанов запасован неразрывный трос 7 с образованием тросового захвата в виде петли с зажимом 8 и предохранителем 9 для ее самозатягивания. Тросовый захват может быть выполнен из силикатных нитей орлона. Кроме того, на судне 1 установлены датчики 10, замеряющие натяжение тросов 7.
Данная система включает также самоходный подводный аппарат 11 с манипулятором 12 и работает следующим образом.
Каждый неразрывный трос 7 укладывается на грузовой палубе 2 с образованием самозатягивающейся петли, размер которой более поперечного сечения затонувшего объекта, например подводной лодки. Для сохранения размера этой петли на нее надевают зажимы 8, а в месте изгиба устанавливают съемный предохранитель 9. Тросовые захваты опускают с носовой и кормовой частей судна 1 путем разматывания каждого неразрывного грузоподъемного троса 7 с соответствующей пары барабанов 3. После этого каждый тросовый захват заводят при помощи подводного самоходного аппарата 11 под затонувшую подводную лодку 6, осуществляют предварительный натяг тросов 7 с одновременным обжимом корпуса этой подводной лодки 6 и производят выборку тросов 7 с поднятием лодки 6.
При опускании тросового захвата грузоподъемные барабаны вращают приводом 5, а при подъеме эти барабаны вращают путем попеременного заполнения их отсеков водой.
После подъема затонувшей лодки 6 к поверхности она может быть остроплена судоподъемными понтонами 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ ОБЪЕКТОВ | 2009 |
|
RU2417921C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2003 |
|
RU2269448C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2002 |
|
RU2229418C2 |
| ПЛАВАЮЩАЯ ПЛАТФОРМА ДЛЯ МОРСКОГО СТРОИТЕЛЬСТВА И ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2003 |
|
RU2261818C2 |
| СИСТЕМА ДЛЯ БУРОВЫХ РАБОТ ПОД ДНОМ ВОДОЕМОВ | 1999 |
|
RU2166584C2 |
Сущность изобретения: способ заключается в том, что с надводного суска опускают тросовые захваты в виде сформированных на палубе самозатягивающихся петель, снабженных зажимами и предохранителями. Затем эти петли заводят над затонувший объект подводным самоходным аппаратом, после чего осуществляют предварительный натяг тросов с одновременным обжатием корпуса затонувшего объекта. Система содержит подводный самоходный аппарат и надводное судно катамаранного типа с грузоподъемными барабанами, на каждой паре которых закреплен трос, с тросовым захватом. 2 с. и 1 з.п. ф-лы, 4 ил.
| Способ извлечения оправок после прокатки труб | 1986 |
|
SU1328014A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
