Изобретение относится к способам и устройствам поиска и обезвреживания подводных диверсионных сил путем применения подводных аппаратов с размещенным на них вооружением, в частности средствами, обеспечивающими управление, навигацию, обнаружение, классификацию и поражение подводных объектов, и может быть использовано для защиты акваторий военно-морских баз, портов и гидротехнических сооружений, размещенных во внутренних водоемах и на континентальном шельфе.
Наиболее эффективно задачи защиты акваторий от проникновения подводных диверсантов могут выполняться мобильными управляемыми средствами, способными самостоятельно обнаруживать и обезвреживать боевых пловцов.
Известен способ охраны акваторий специально подготовленными морскими млекопитающими - дельфинами и морскими львами. Способ заключается в том, что свободно перемещаясь по случайной траектории, адаптивно к внешним факторам, морские млекопитающие посредством так называемого "биогидролокатора" обнаруживают и опознают подводные объекты. Сблизившись на дистанцию непосредственного контакта с обнаруженным объектом, животные обезвреживают водолазов путем срывания дыхательных аппаратов, разбрасывания подрывных зарядов, нанесения уколов иглами, снаряженными быстродействующим ядом, или навязывания "игр", принуждающих пловцов к всплытию и выходу на берег (Аракчеев В. Морские млекопитающие на службе Пентагона // Зарубежное военное обозрение. - М.: "Красная звезда", 1997. - №5. - С.49-52).
Несмотря на относительную простоту и эффективность применения данный способ имеет существенные недостатки:
1. Применение способа в акваториях с высоким уровнем загрязнения среды может привести к необоснованной гибели используемых животных.
2. Находясь в свободном поиске, морские млекопитающие могут отвлекаться от выполнения задачи, реагируя на других животных и посторонние объекты.
3. Произвольный выбор морским млекопитающим объекта атаки и несанкционированное применение средства поражения.
4. Отсутствие на млекопитающих технических средств наблюдения, объективного контроля и документирования не позволяет управлять их поведением, а также определять правильность выбора и оценивать результаты воздействия на объект атаки.
5. Подготовка морских млекопитающих для борьбы с боевыми пловцами носит индивидуальный характер и осуществляется в течение длительного времени высококвалифицированными специалистами в области дрессировки на специально оборудованных полигонах. Связанные с этим процессом расходы материальных и временных ресурсов не позволяют развернуть массовое производство подобных биотехнических систем, реализующих рассматриваемый способ.
6. Морские млекопитающие уязвимы от поражения как обычным, так и специальным подводным оружием.
Недостатки рассмотренного способа в значительной мере устраняются другим, более близким, выбранным в качестве прототипа известным способом, заключающимся в охране акваторий водолазами на подводном транспортировщике. Осуществляя движение по заданному маршруту, водолазы визуально обследуют назначенный район. Обнаружив и распознав подводного диверсанта, они приводят транспортировщик в удобную для выполнения стрельбы позицию и применяют по цели специальное стрелковое оружие. После поражения цели, принуждения пловца к всплытию или потери его из поля зрения они передают по радиоканалу сообщение о выполненных действиях и достигнутых результатах на внешний пункт управления. Получив подтверждение и распоряжения на дальнейшие действия, водолазы продолжают выполнять свою задачу (Дмитриев В.В. и др. Подводные "москиты". - М.: Воениздат, 1969. - С.92-95).
Известное устройство, выбранное в качестве аналога и реализующее этот способ, включает двухместный подводный носитель, водолаза-водителя транспортного средства и водолаза-стрелка, вооруженного автоматом подводным специальным (АПС). Внешне конструкция носителя представляет собой торпеду, приводимую в движение электродвигателем, работающим на гребные винты. Дополнительно транспортировщик оборудован кабинами для водолазов, пультом управления, бортовой системой жизнеобеспечения, глубиномером, устройством вертикального маневрирования (стабилизатором глубины), навигационным комплексом (курсоуказатель и измеритель относительной скорости хода), станциями звукоподводной и радиосвязи, гидроакустическими станциями обнаружения препятствий и привода на маяк. Источником энергии для средств движения и электронных приборов является аккумуляторная батарея химических источников тока (Гагин В.В. Сверхмалые подводные лодки и боевые пловцы. - Воронеж: "Полиграф", 1996. - С.42-43).
Недостатки данного способа и устройства заключаются в следующем:
1. Водолазные работы в целом ограничиваются ледовыми условиями, состоянием водной поверхности и уровнем освещенности. С учетом этих факторов неблагоприятными для применения данного способа являются подавляющее число регионов Российской Федерации в течение большей части календарного года и значительной доли суток.
2. За один рабочий цикл водолазы способны обследовать относительно небольшой по площади район акватории. Причинами этого являются:
- время пребывания водолазов в воде ограничено их физиологической способностью противостоять отрицательному воздействию окружающей среды, особенно низких температур и повышенного давления;
- низкая эффективность визуального наблюдения под водой, определяющаяся дальностью видимости не более 5-10 м, свойственной мелководным районам, а также высокой вероятностью пропуска цели, что объясняется узким полем зрения водолазов и малой скоростью обзора пространства.
3. Устанавливаемые на транспортировщике навигационные приборы вырабатывают только курс и относительную скорость движения носителя. Отсутствие точных данных о пространственной ориентации, координатах, а также абсолютной скорости хода подводного аппарата приводит к значительным отклонениям транспортного средства от заданной траектории и вызывает необходимость частых всплытий к поверхности для выполнения обсерваций. Это дополнительно сокращает продолжительность подводных работ.
4. Классификация подводных объектов путем только визуального распознавания имеет низкую степень достоверности, так как за искомую цель могут быть приняты тени, водоросли, морские животные и т.д. С этой причиной связаны случаи необоснованного применения оружия и расхода ограниченного боезапаса.
5. Процесс нейтрализации обнаруженных целей следует оценивать, как двухстороннее применение средств поражения, так как в состав снаряжения подводных диверсантов обязательно включается специальное оружие, которое они применяют в целях самообороны. Поэтому в результате подводного боя следует ожидать человеческих жертв, в том числе с обороняющейся стороны.
6. Так как прицеливание оружия осуществляется водолазом-стрелком визуально, то применение АПС ограничено дальностью подводной видимости, что не позволяет в полной мере реализовать потенциальные возможности автомата.
7. Отсутствие на борту носителя технических средств наблюдения, объективного контроля и документирования не позволяет анализировать характер и обоснованность действий рассматриваемой системы, а также подтвердить достоверность классификации обнаруженных объектов и результатов применения оружия.
Многие недостатки, присущие аналогу устройства, устранены в известной конструкции автономного необитаемого подводного аппарата (АНПА) AUSS, выбранного в качестве прототипа. Движение данного подводного аппарата обеспечивается маршевым электродвигателем, маневрирование в вертикальной и горизонтальной плоскостях осуществляется за счет работы подруливающих устройств, компенсация остаточной плавучести достигается заполнением или осушением балластной цистерны. Положение АНПА относительно водной поверхности и дна контролируется по данным глубиномера и эхолота, безопасность от столкновений с подводными объектами обеспечивается навигационной эхолокационной системой. Необходимая точность движения подводного аппарата по заданной траектории обеспечивается навигационным комплексом, в состав которого входят гироскопические датчики курса, крена, дифферента и угловых скоростей, доплеровский гидроакустический лаг и гидроакустическая навигационная система. Для обследования подводной среды АНПА оборудован гидролокаторами переднего и бокового обзора, высокая достоверность классификации обнаруженных объектов обеспечивается системой фото- и телевизионных камер. Для повышения качества фотоснимков и телевизионных изображений применяется стробированный осветитель. Параметры, описывающие движение АНПА и работу его технических средств, а также фото- и телевизионные материалы документируются в накопительном устройстве бортового компьютера. Для приема и передачи данных и команд телеуправления по каналу гидроакустической связи на подводном аппарате размещается соответствующая аппаратура. Архитектура АНПА имеет полуторакорпусную конструкцию: носовая и кормовая оконечности образуют легкий (водопроницаемый) корпус и предназначены для размещения датчиков и исполнительных устройств управления, средняя часть представляет собой прочный герметичный отсек с электронными приборами и аккумуляторами источника энергии (Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. и др. Системы управления подводными роботами. / Под ред. В.Ф.Филаретова. - М.: "Круглый год", 2001. - С.56-62).
В связи с тем, что АНПА AUSS предназначен для решения ограниченного круга исследовательских задач, ему присущи следующие недостатки:
1. Отсутствие аппаратуры, обеспечивающей прием-передачу команд и информации по радиоканалу, ограничивает оперативный радиус его действия относительно внешнего поста управления дальностью надежной гидроакустической связи.
2. Отсутствие в составе оборудования средств воздействия на подводные диверсионные силы не позволяет обезвреживать боевых пловцов и поражать их транспортные средства.
От указанных выше недостатков свободны заявленные в качестве группы изобретений способ защиты охраняемой акватории от подводных диверсантов и устройство для его осуществления, единой технической задачей которых является автономный поиск и обезвреживание боевых пловцов.
Реализация указанной технической задачи, предлагаемой группой изобретений, позволяет добиться следующих технических результатов:
1. Создание нового устройства - автономного необитаемого подводного аппарата с размещенными на нем средствами управления, навигации, обнаружения, классификации и поражения подводных объектов.
2. Существенное повышение эффективности способа защиты охраняемой акватории от подводных диверсантов достигнуто путем:
- универсальности применения по физико-географическим и экологическим условиям за счет введения в состав устройства новых технических средств, позволяющих заменить биологически зависимые системы;
- многократного увеличения поисковой производительности за счет использования гидроакустических средств освещения подводной обстановки;
- значительного приращения продолжительности подводных работ за счет включения в состав навигационного комплекса качественно новых приборов, обеспечивающих высокую точность позиционирования и ориентирования, что позволяет до минимума сократить частоту всплытий к поверхности для обсерваций;
- повышения достоверности классификации обнаруженных подводных объектов, достигаемой благодаря комплексному использованию данных, полученных гидроакустическими и оптоэлектронными средствами наблюдения;
- исключения рисков для жизни и здоровья персонала, традиционно привлекаемого к решению аналогичных задач, за счет полной роботизации устройства;
- конструктивной защиты элементов полезной нагрузки и энергетической установки от внешних воздействий прочным корпусом подводного аппарата;
- роста поражающего потенциала за счет количественного и качественного расширения состава, а также увеличения дальности боевого применения оружия;
- совершенствования системы управления устройством за счет минимизации влияния субъективных факторов и использования автоматических средств технического контроля за его состоянием, поведением и результатами действий.
Предлагаемый способ защиты охраняемой акватории от подводных диверсантов заключается в обследовании подводной среды и дна гидроакустическими средствами наблюдения, размещенными на подводном носителе, движущемся по заданной траектории с обходом препятствий. При обнаружении объекта с гидроакустическими признаками подводных диверсионных сил подводный аппарат сближается с ним и поражает объект, применяя оружие.
Принципиальным отличием заявляемого способа от прототипа является то, что сблизившись с объектом, автономный необитаемый подводный аппарат выполняет телевизионную съемку, после чего передает всю совокупность его классификационных признаков на внешний пост управления для анализа и принятия решения на дальнейшие действия, продолжая сопровождение объекта. Комплексное использование данных, полученных различными средствами освещения обстановки, позволяет достичь высокой достоверности классификации обнаруженных объектов и большей обоснованности противодиверсионных действий.
Другим отличием заявляемого способа от прототипа является документирование телеметрической информации и данных средств освещения обстановки в накопительном устройстве бортового компьютера, благодаря чему появляется возможность в дальнейшем совершенствовать систему управления поведением автономного необитаемого подводного аппарата и объективно оценивать его состояние и результаты действий на основе анализа данных автоматических средств технического контроля.
Отличительной особенностью заявляемого способа от прототипа является и то, что анализ, принятие решения на дальнейшие действия и оценку их результатов на основе комплексных данных средств освещения обстановки осуществляет оператор внешнего поста управления. Такая процедура позволяет надежно контролировать действия автономного необитаемого подводного аппарата по классификации и поражению подводных объектов, одновременно оставляя ответственность за принятые решения на соответствующем персонале.
В отличие от аналога, заявляемый способ предусматривает длительное сопровождение обнаруженного объекта путем поддержания с ним гидроакустического контакта, что позволяет непрерывно корректировать и уточнять данные, необходимые для эффективного применения оружия.
Заявляемый способ защиты охраняемой акватории реализуется с помощью устройства, представляющего собой автономный необитаемый подводный аппарат однокорпусной конструкции с маршевым двигателем и гребными винтами, рулевыми устройствами, системой динамического позиционирования, а также автономными источниками энергии. Полезная нагрузка заявляемого устройства включает:
- бортовой цифровой вычислительный комплекс (БЦВК) с накопителем информации, обеспечивающий согласованное функционирование технических средств автономного необитаемого подводного аппарата, обработку и накопление информации;
- навигационный комплекс, вырабатывающий координаты и параметры движения подводного аппарата;
- навигационную эхолокационную систему и датчик глубины погружения, определяющие положение подводного аппарата относительно препятствий, дна и водной поверхности;
- средства связи для обмена сообщениями с внешним постом управления;
- гидролокаторы секторного и бокового обзора, обеспечивающие обнаружение и определение параметров подводных объектов;
- телевизионную систему, являющуюся основным средством классификации;
- датчики для измерения гидрофизических параметров среды и контроля за состоянием подводного аппарата;
- средства поражения подводных диверсионных сил.
Отличительными признаками заявляемого устройства относительно прототипа является использование в качестве средств связи радиостанции и приемопередатчика гидроакустической системы связи и телеуправления (ГАСС и ТУ), а также применения в качестве средств поражения малогабаритных торпед, закрепленных посредством замков на внешней стороне корпуса АНПА и автоматических установок подводной стрельбы (АУПС), размещенных в корпусе с возможностью выдвижения для боевого применения и последующего возврата в исходное положение. В отличие от прототипа в состав навигационного комплекса заявляемого устройства, взамен отдельных гироскопических датчиков, включены инерциальная навигационная система и, дополнительно, приемник спутниковых радионавигационных систем.
Перечисленная новая совокупность существенных признаков обеспечивает возможности: применения заявляемого способа защиты охраняемых акваторий от подводных диверсантов в различных физико-географических и экологических условиях благодаря замене биологически зависимых систем техническими средствами адаптивного управления, поиска, классификации и поражения подводных объектов; повышения поисковой производительности за счет использования гидролокаторов секторного и бокового обзора; увеличения времени непрерывного выполнения подводных работ путем минимизации числа всплытий к поверхности для обсерваций, достигнутой повышением точности выработки данных навигационным комплексом; исключения рисков для жизни и здоровья персонала за счет полной роботизации устройства; надежной защиты элементов полезной нагрузки и энергетической установки от внешних воздействий прочным корпусом; наращивания поражающего потенциала благодаря увеличению дальности боевого применения оружия по данным целеуказания гидроакустических средств и изменению количественного и качественного состава средств поражения. Наличие в составе заявляемого устройства накопителя информации большой емкости обеспечивает документирование в хронометрической последовательности всех параметров телеметрического контроля и данных средств освещения обстановки за весь рабочий цикл подводного аппарата. Использование навигационной эхолокационной системы позволяет подводному аппарату безопасно перемещаться в заданном диапазоне глубин погружения, заблаговременно обнаруживая и обходя препятствия. Наличие станции радиосвязи способствует увеличению оперативного радиуса действия автономного необитаемого подводного аппарата, а аппаратуры гидроакустической системы связи и телеуправления позволяет осуществлять обмен сообщениями с внешним постом управления без необходимости всплытий на поверхность, что особенно важно при эксплуатации заявляемого устройства в ледовых условиях. Датчики гидрофизических параметров среды позволяют непрерывно оценивать ее состояние, обеспечивая адаптивное управление движением подводного аппарата и эффективное использование средств связи, навигации и освещения обстановки. Вооружение автономного необитаемого подводного аппарата малогабаритными торпедами обеспечивает поражение транспортных средств боевых пловцов, а использование автоматических установок подводной стрельбы позволяет осуществлять в течение короткого промежутка времени интенсивный обстрел нескольких целей, распределенных в зоне действия гидролокационных средств.
Реализация заявляемого способа и устройства для его осуществления поясняется чертежами, на которых изображены:
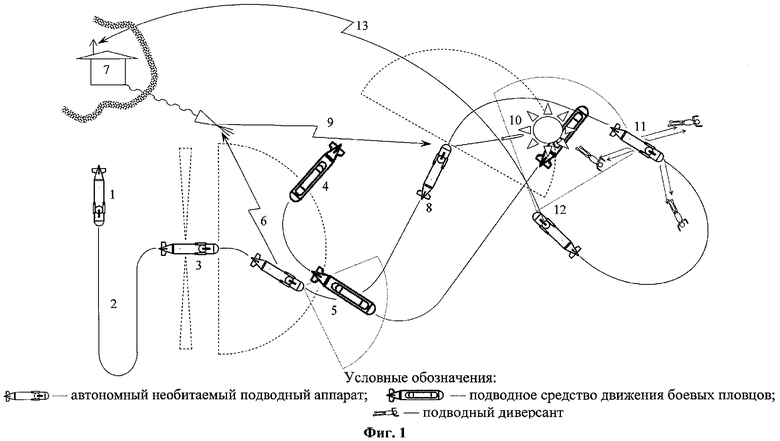
- фиг.1 последовательность действий автономного необитаемого подводного аппарата при защите охраняемой акватории от подводных диверсантов;
- фиг.2 структурная схема противодиверсионного автономного необитаемого подводного аппарата.
Для достижения указанного технического результата заявляемый способ защиты охраняемой акватории от подводных диверсантов реализуется следующим образом, как представлено на фиг.1.
Автономный необитаемый подводный аппарат 1 движется по заданной траектории 2, обходя препятствия. В процессе движения АНПА обследует водную среду и дно акватории гидроакустическими средствами 3 методом эхолокации. Обнаружив подводный объект 4, гидроакустические характеристики и параметры которого соответствуют классификационным признакам подводных диверсионных сил, АНПА сближается с ним на дальность, обеспечивающую получение качественного изображения телевизионными средствами. Выполнив телевизионную съемку объекта 5, подводный аппарат передает сообщение 6 на внешний пост управления 7, содержащий телеметрические параметры АНПА и классификационные признаки, включая изображение, обнаруженной цели. После передачи донесения подводный аппарат, оставаясь в положении, обеспечивающем прием команд от поста управления, сопровождает 8 подводный объект, поддерживая с ним надежный гидроакустический контакт. На внешнем посту управления принятое сообщение анализируется, обнаруженный объект окончательно классифицируется, и оператор принимает решение на дальнейшие действия подводного аппарата. В частности, АНПА могут быть переданы команды: "пропустить объект и продолжить обследование назначенного района", "сопровождать объект и передавать данные по нему с назначенной периодичностью", "атаковать и преследовать объект с применением оружия" и так далее. При получении от внешнего поста управления условного сигнала 9, санкционирующего атаку и преследование подводных диверсионных сил, АНПА последовательно применяет по сопровождаемому объекту малогабаритные торпеды 10 и, сблизившись с подводными диверсантами, обстреливает их автоматическими установками 11. Преследование боевых пловцов продолжается до потери гидроакустического контакта с движущимися в воде объектами. После окончания преследования АНПА обследует зоны поражения гидроакустическими и телевизионными средствами 12. Затем подводный аппарат передает на внешний пост управления сообщение, содержащее весь объем данных, полученных с момента получения команды, санкционирующей атаку и преследование диверсионных сил, до окончания обследования зон поражения.
Устройство для осуществления способа защиты охраняемой акватории от подводных диверсантов представлено на фиг.2, где указаны:
1 - гидролокатор секторного обзора;
2 - телевизионная система;
3 - измеритель относительной скорости хода;
4 - измеритель гидрофизических параметров среды;
5 - подруливающие устройства системы динамического позиционирования;
6 - автоматическая установка подводной стрельбы;
7 - малогабаритная торпеда;
8 - приемник спутниковых радионавигационных систем;
9 - аппаратура радиосвязи;
10 - аппаратура гидроакустической системы связи и телеуправления;
11 - датчик глубины погружения;
12 - автономный источник энергии;
13 - маршевый электродвигатель;
14 - рулевые устройства;
15 - стабилизаторы;
16 - гребные винты;
17 - блок управления двигателем;
18 - аппаратура гидроакустической навигационной системы;
19 - измеритель абсолютной скорости хода;
20 - инерциальная навигационная система;
21 - гидролокатор бокового обзора;
22 - бортовой цифровой вычислительный комплекс (БЦВК);
23 - навигационная эхолокационная система;
24 - прочный корпус.
Заявляемый автономный необитаемый подводный аппарат представляет собой техническую систему торпедообразной конструкции. Единый герметичный прочный корпус 24 обтекаемой формы образован отсеками, жестко сочлененными между собой клиноцанговыми бандажными соединениями. Подкрепленная шпангоутами оболочка прочного корпуса обеспечивает защиту большинства элементов полезной нагрузки и энергетическую установку от воздействия внешних факторов, вызываемых спецификой функционирования АНПА (гидростатическое и гидродинамическое давление, влага, удары о грунт или лед, подводные взрывы и т.д.). Условно корпус подводного аппарата разделен на три основные части: округлую переднюю, цилиндрическую среднюю и коническую кормовую. В передней части подводного аппарата размещены камеры и осветители телевизионной системы 2, измеритель относительной скорости хода 3, датчики гидрофизических параметров среды 4, навигационная эхолокационная система 23 и гидролокатор секторного обзора 1, антенное устройство которого вынесено за пределы прочного корпуса и закрыто акустически прозрачным обтекателем. В средней части внутри прочного корпуса АНПА размещены приемник спутниковых радионавигационных систем 8, аппаратура радиосвязи 9, гидроакустической системы связи и телеуправления 10 и гидроакустической навигационной системы 18, датчик глубины погружения 11, аккумуляторы источника энергии 12, измеритель абсолютной скорости хода 19, инерциальная навигационная система 20, гидролокатор бокового обзора 21 и бортовой цифровой вычислительный комплекс 22. Здесь же, но снаружи прочного корпуса, в пределах его внешних обводов, размещаются выдвижные автоматические установки подводной стрельбы 6 башенного типа с приводами выдвижения и наведения в вертикальной и горизонтальной плоскостях. Малогабаритные торпеды 7 закреплены на внешней стороне цилиндрической части прочного корпуса посредством замков. В кормовой части подводного аппарата находятся маршевый электродвигатель 13 с блоком управления 17, соединенный посредством валопровода с соосными гребными винтами 16, а также рулевые устройства 14, динамические элементы (рули) которых расположены в плоскостях стабилизаторов 15. Между основными частями корпуса расположены горизонтальные, а в районе миделя - вертикальное подруливающие устройства 5 тоннельного типа.
Устройство работает следующим образом. Автономный необитаемый подводный аппарат осуществляет движение по заданной траектории за счет работы маршевого электродвигателя 13 на гребные винты 16. Изменение режимов и скорости движения осуществляется по управляющему сигналу БЦВК 22, поступающему в блок управления электродвигателем 17. Блок 17 регулирует частоту вращения электродвигателя 13 путем изменения подводимого к нему напряжения источника энергии 12. Маневрирование АНПА по курсу, глубине и углу дифферента осуществляется путем изменения положения рулей 14 по командам БЦВК 22, вырабатываемым на основании заданной программы или адаптивно к сложившимся условиям (появление препятствия, отклонение от траектории, изменение состояния среды). Высокая точность движения по заданной траектории и ориентирования АНПА под водой достигается за счет комплексного использования данных, вырабатываемых инерциальной навигационной системой 20 (географические координаты, курс, скорость, углы крена и дифферента, угловые скорости), корректируемых показаниями измерителей относительной 3 и абсолютной 19 скоростей хода, а также приемника спутниковых радионавигационных систем 8 и аппаратуры гидроакустической навигационной системы 18. Такой подход к навигационному обеспечению позволяет минимизировать частоту всплытий АНПА для обсерваций и, таким образом, повысить общую продолжительность и непрерывность подводных работ. В целях точного удержания местоположения относительно каких-либо объектов на сверхмалых скоростях АНПА оборудован системой динамического позиционирования, состоящей из вертикального и горизонтальных подруливающих устройств 5. Перемещение подводного аппарата в двух плоскостях и горизонтальный поворот в режиме "зависания" достигаются изменением соответствующих векторов тяги, создаваемыми в тоннелях при вращении гребных винтов маневровыми электродвигателями. Непрерывно измеряемые датчиком 4 параметры окружающей среды (плотность, соленость, температура и скорость звука) обрабатываются бортовым вычислительным комплексом 22 и используются в дальнейшем для адаптивного управления движением подводного аппарата и эффективного использования гидроакустических средств поиска, связи и навигации. Навигационная эхолокационная система 23 излучает в нескольких направлениях зондирующие импульсы и по времени прихода сигналов, отраженных от подводных объектов и границ разделения сред, определяет расстояния до препятствий. Полученные данные поступают в БЦВК 22, который при необходимости корректирует траекторию движения АНПА для уклонения от столкновения. Это позволяет подводному аппарату безопасно плавать в сложных оперативных, навигационно-гидрографических и климатических условиях, характерных для внутренних водоемов и прибрежных морских акваторий. Гидролокатор секторного обзора 1 зондирует окружающую среду, а гидролокатор бокового обзора 21 - дно акватории с целью обнаружения подводных объектов на расстояниях, значительно превышающих дальность видимости под водой. Принятые гидроакустическими станциями 1 и 21 сигналы, отраженные и излучаемые обнаруженными объектами, обрабатываются и анализируются с целью выделения характерных признаков, которые затем транслируются в БЦВК 22 для классификации путем сравнения с эталонными параметрами. Использование в составе АНПА гидролокаторов секторного 1 и бокового 21 обзора позволяет, таким образом, многократно увеличить поисковую производительность и предварительно распознавать объекты с признаками диверсионных сил. Высокая степень достоверности классификации подводных объектов достижима при наличии соответствующих видовых признаков. Для их получения на АНПА размещена телевизионная система 2, состоящая из нескольких передающих камер и стробированных осветителей, которые предназначены для повышения качества телевизионных изображений. БЦВК 22 формирует сообщение, содержащее телеметрические параметры и весь комплекс данных об объекте, для передачи на внешний пост управления. Передача сообщений осуществляется по гидроакустическому или радиоканалу. Аппаратура ГАСС и ТУ 10 используется при удалении АНПА от внешнего поста управления на расстояние, не превышающее дальность надежной гидроакустической связи, или в условиях, когда использование радиоканала затруднено или невозможно, например при наличии сплоченного льда. В этом случае район действий подводного аппарата ограничивается дальностью надежной гидроакустической связи или оборудуется дополнительными гидроакустическими приемопередатчиками, обеспечивающими двустороннюю ретрансляцию сообщений. Значительному увеличению оперативного радиуса действий АНПА, а также объема и скорости приема-передачи сообщений способствует использование аппаратуры радиосвязи 9. Для проведения сеанса связи по радиоканалу подводному аппарату необходимо всплыть к водной поверхности и поднять ультракоротковолновую антенну. При получении условного сигнала, санкционирующего атаку и преследование диверсионных сил, АНПА немедленно применяет по ним малогабаритные торпеды 7 или автоматические установки подводной стрельбы 6. Размещение на подводном аппарате нескольких различных типов оружия значительно повышает его поражающий потенциал и избирательность. Выбор средств поражения осуществляется БЦВК 22 исходя из типа атакуемой цели и занимаемой позиции. Стрельба малогабаритными торпедами 7 выполняется по подводным средствам движения диверсантов и группам боевых пловцов из позиции безопасной от поражения АНПА при взрыве собственного боеприпаса. В процессе подготовки к торпедной стрельбе БЦВК 22 по данным гидролокаторов 1 или 21 вырабатывает необходимые параметры, задающие траекторию движения малогабаритных торпед 7, которые вводятся в оружие по кабельной линии связи. По условному сигналу БЦВК 22 замки освобождают малогабаритную торпеду, одновременно запускается ее двигатель, и она начинает движение к цели по заданной траектории. Автоматические установки подводной стрельбы 6 применяются как по одиночным диверсантам, так и по группам боевых пловцов из позиции, обеспечивающей досягаемость оружия. Перед боевым применением АУПС 6 выдвигаются из шахт и наводятся электроприводами на обстреливаемые цели по данным гидролокаторов 1 или 21, что позволяет многократно увеличить дистанцию боевого применения этих средств поражения. Размещение и конструкция АУПС 6 позволяют выполнять стрельбу одновременно по нескольким целям, находящимся на различных направлениях относительно АНПА как в верхней, так и в нижней полусфере пространства. После выполнения стрельбы автоматические установки подводной стрельбы 6 приводятся в исходное положение. По окончании преследования диверсантов БЦВК 22 рассчитывает новую траекторию движения подводного аппарата таким образом, чтобы обследовать зоны поражения для установления результатов боевого применения оружия. Обследование осуществляется с синхронным использованием гидролокационных средств 1, 21 и телевизионной системы 2. По его окончании БЦВК 22 формирует сообщение, содержащее всю информацию, сохраненную в накопительном устройстве за период от момента получения команды, санкционирующей атаку и преследование диверсионных сил, до окончания обследования зон поражения. В связи с большим объемом сообщения его передача осуществляется преимущественно по радиоканалу.
Заявляемое изобретение - способ защиты охраняемой акватории от подводных диверсантов и устройство для его осуществления - обладает следующими достоинствами:
- универсальность применения по физико-географическим и экологическим условиям, исключение рисков для жизни и здоровья персонала;
- оперативность развертывания полноценной системы защиты на необорудованных акваториях с любых плавсредств, оснащенных соответствующей аппаратурой и грузовыми устройствами;
- высокая эффективность использования за счет увеличения поисковой производительности, продолжительности подводных работ, достоверности классификации обнаруженных объектов, поражающего потенциала и защищенности устройства от внешних воздействий;
- возможность постоянного совершенствования системы управления на основе анализа широкого спектра документируемых данных средств технического контроля;
- возможность налаживания массового серийного производства.
Заявляемые способ и устройство промышленно применимы, так как для их реализации используются широко распространенные компоненты и изделия промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пространственной ориентации системы нелетального воздействия | 2022 |
|
RU2801544C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| СПОСОБ ОХРАНЫ ПОДВОДНОГО ОБЪЕКТА | 2016 |
|
RU2659213C2 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2016 |
|
RU2652610C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| Устройство противодиверсионной защиты акватории электрическим током высокого напряжения | 2022 |
|
RU2784118C1 |
| ПОДВОДНЫЙ АППАРАТ КОМПЛЕКСНЫЙ | 2016 |
|
RU2640598C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
Сущность изобретения заключается в гидролокационном обследовании подводной среды и дна автономным необитаемым подводным аппаратом, движущимся по заданной траектории. При обнаружении диверсионных сил этот аппарат сближается с объектом, выполняет телевизионную съемку, передает сообщение на внешний пункт управления, сопровождает объект, поддерживая с ним гидроакустический контакт, по команде с внешнего поста управления применяет по объекту оружие и обследует зону поражения. Устройство для осуществления данного способа представляет собой автономный необитаемый подводный аппарат торпедообразной конструкции, оснащенный средствами управления, навигации, связи, обнаружения, классификации и поражения диверсионных сил. В качестве средств связи используются радиостанция и аппаратура гидроакустической связи. В качестве средств поражения используются малогабаритные торпеды, закрепленные замками снаружи прочного корпуса, и автоматические установки подводной стрельбы, выдвигающиеся из шахт в корпусе для боевого применения и в последующем приводимые в исходное положение. Реализация изобретения позволит повысить безопасность охраняемой акватории. 2 н. и 6 з.п. ф-лы, 2 ил.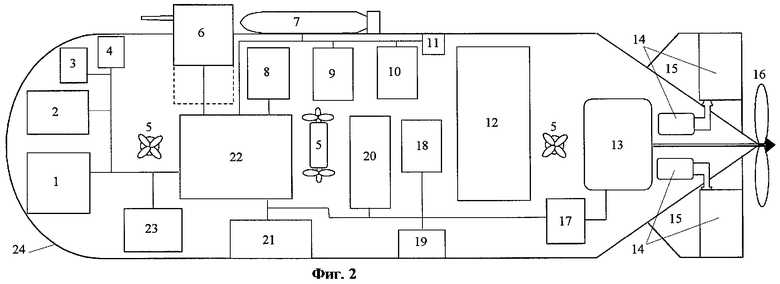
| ДМИТРИЕВ В.В | |||
| и др | |||
| Подводные «москиты» | |||
| - М.: Воениздат, 1969, с.92-95 | |||
| US 4030434 А, 21.06.1977 | |||
| US 4212258 А, 15.06.1988 | |||
| GB 2177352 А, 21.01.1987. |

