Изобретение относится к области гидроакустики и может быть использовано в системах активного воздействия на нарушителей охраняемых акваторий, подводных и надводных объектов.
Известен способ защиты охраняемой акватории от подводных диверсантов и устройство для его осуществления [1]. Его сущность заключается в гидролокационном обследовании подводной среды и дна автономным необитаемым подводным аппаратом, движущимся по заданной траектории. При обнаружении диверсионных сил этот аппарат сближается с объектом, выполняет телевизионную съемку, передает сообщение на внешний пункт управления, сопровождает объект, поддерживая с ним гидроакустический контакт, по команде с внешнего поста управления применяет по объекту оружие и обследует зону поражения. Устройство для осуществления данного способа представляет собой автономный необитаемый подводный аппарат торпедообразной конструкции, оснащенный средствами управления, навигации, связи, обнаружения, классификации и поражения диверсионных сил. В качестве средств связи используются радиостанция и аппаратура гидроакустической связи. В качестве средств поражения используются малогабаритные торпеды, закрепленные замками снаружи прочного корпуса, и автоматические установки подводной стрельбы, выдвигающиеся из шахт в корпусе для боевого применения и в последующем приводимые в исходное положение.
К недостаткам способа относится сложность и дороговизна реализации, связанная с необходимостью иметь автономный подводный аппарат, оснащенный оружием, системой искусственного интеллекта, системами радио- и гидроакустической связи, а также летальный характер воздействия.
Известен способ защиты объектов водного базирования [2], который заключается в том, что при попадании нарушителя между линиями тока различной плотности, создаваемых в водном объеме, нарушитель оказывается под действием потенциалов разного значения, вследствие чего по его телу течет ток, затрудняющий дальнейшее передвижение. Сущность изобретения состоит в способе воздействия на нарушителя, заключающимся в формировании в водном объеме воздействующей на обнаруживаемого подводного нарушителя зоны поражения электрическим током, возникающей при установке положительных и отрицательных электродов, расположенных друг от друга на определенных расстояниях, к которым подают напряжение. Электроды соединяются изолированными проводниками через коммутационное устройство с источником напряжения. Изоляция проводников снижает энергетические потери. В зависимости от геометрических размеров решаемых тактических задач в водном объеме устанавливается разное количество электродов.
Недостатками данного способа являются сложность установки системы электродов в акватории и поддержания электродов в работоспособном состоянии из-за образования на них отложений, невозможность мобильной перестановки в другую зону, высокая энергоемкость устройства, необходимость работы с высокими напряжениями, отсутствие воздействия на пловца в гидрокостюме из неэлектропроводного материала, кабельного разъема.
Известен способ и устройство электрогидравлического ударного воздействия на нарушителя в воде [3]. Устройство содержит источник электрической энергии, кабельную линию, соединительное устройство, блок формирования импульсов, включающий зарядное устройство, накопитель энергии, коммутатор и линейную часть, выполненную в виде системы электродов, между которыми создается импульсный разряд, формирующий в воде электрогидравлический удар. Линейная часть устройства размещена в герметичной оболочке, заполненной рабочей>жидкостью, имеющей требуемые характеристики. При электровзрыве, происходящем в рабочей жидкости внутри герметичной оболочки, ударная волна передается через стенки оболочки в окружающую водную среду. Техническим результатом является обеспечение различных степеней физиологического воздействия подводного взрыва на биологический объект и для активного воздействия на технические средства нарушения, вне зависимости от характеристик воды в акватории.
Недостатками данного устройства являются сложность установки системы электродов в акватории, необходимость работы с высокими напряжениями, малая дистанция воздействия из-за низкого уровня сигнала, а также ненаправленный характер излучения и невозможность его фокусировки на целевом объекте.
Известно устройство активного воздействия на нарушителей охраняемых акваторий [4]. В устройстве, содержащем надводный модуль с источником электрической энергии, кабельную линию, соединительное устройство, подводный модуль с линейной частью, выполненной в виде размещенного в герметичном корпусе электродинамического индуктора с излучающим диском, блок формирования импульсов, с зарядным устройством, накопитель энергии и коммутатор разрядного тока реализован принцип работы, основанный на импульсном, ударно-волновом воздействии на подводный объект. При этом блок формирования импульсов размещен в герметичном корпусе подводного модуля с аккумулятором, соединенным с зарядным устройством, в виде последовательно соединенных коммутатора зарядного тока, преобразователя напряжения, высоковольтного повышающего трансформатора и выпрямителя, при этом надводный модуль снабжен блоком зарядки аккумулятора, блоками управления коммутаторами зарядного тока и разрядного тока, соединенными через кабельную линию соответственно с аккумулятором, коммутатором зарядного тока и коммутатором разрядного тока, причем соединительное устройство выполнено в виде герметичного кабельного разъема. Устройство работает следующим образом. Надводный модуль устанавливается на плавающей платформе либо на берегу. Подводный модуль закрепляется на координатно-поворотном устройстве и погружается в воду. При обнаружении нарушителя (визуально либо с помощью гидроакустической станции) ось подводного модуля ориентируется в направлении нарушителя. Техническим результатом изобретения является увеличение зоны действия за счет направленности излучения и повышение уровня безопасности эксплуатации за счет исключения высоких напряжений в надводном модуле и в кабельной линии.
Существенным недостатком изобретения является громоздкость и сложность работы с координатно-поворотным устройством и отсутствие способа автоматического наведения направленного излучения на целевой объект.
Известно средство активной защиты акваторий [5]. Средство активной защиты акваторий содержит источник электрогидравлического ударного воздействия, активную гидроакустическую станцию обнаружения боевых пловцов и устройство управления включением источника электрогидравлического воздействия. Новым в средстве активной защиты акваторий является использование средства обнаружения нарушителя, состоящее из активной гидроакустической станции обнаружения и устройства управления включением источника электрогидравлического воздействия. При попадании нарушителя в область обнаружения устройство поражает боевого пловца электрогидравлическим ударом. Техническим результатом является снижение энергопотребления устройства зашиты, а также повышение скрытности функционирования путем введения в устройство датчика обнаружения нарушителя.
Недостатком такого подхода является ненаправленный характер ударного воздействия и невозможность активного наведения излучения на целевой объект.
Известен способ активной защиты акватории ударно-волновым воздействием на подводный объект и устройство для его осуществления [6]. Способ активной защиты акватории ударно-волновым воздействием на подводный объект заключается в электродинамическом инициировании ударно- волнового импульса сжатия, излучаемого в виде импульсного луча в направлении подводного объекта. Устройство активной защиты акватории ударно-волновым воздействием на подводный объект включает блок питания, импульсный конденсатор, коммутатор, импульсный электродинамический излучатель с нагрузочными витками и излучающим внешней поверхностью диском, внутренняя поверхность которого оппозитна к поверхности укладки нагрузочных витков. Импульсный электродинамический излучатель имеет излучающие шайбы с дополнительными нагрузочными витками, причем каждая из шайб охватывает диск коаксиально. Для увеличения дистанции и эффективности воздействия луча на объект, луч фокусируют с образованием импульсного звукового канала. Достигается повышение эффективности ударно-волнового воздействия. В варианте стационарного размещения устройства, для осуществления процесса защиты охраняемого участка акватории от нежелательных (например, подводных диверсантов) подводных объектов устройство размещают стационарно на элементах прибрежной инфраструктуры и помещают в водную среду на глубине от 1 до 3 м с ориентированием излучающей части в направлении зоны интереса.
Посредством гидролокатора излучающую часть ориентируют в направление цели, идентифицируют цель и, при подтверждении идентификации цели, совмещают с последней ось излучающей части индуктора и производят подачу ударно-волнового импульса (или серии импульсов).
Недостатком предложенного способа является отсутствие возможности автоматического наведения направленного излучения на целевой объект и отсутствие возможности активного изменения дистанции между целевым объектом и устройством активной защиты.
Наиболее близким по технической сущности и достигаемому результату является способ активной защиты акватории ударно-волновым воздействием на подводный объект [7] и устройство для его осуществления [8]. Способ активной защиты акватории ударно-волновым воздействием на подводный объект, включающий электродинамическое инициирование излучателем ударно-волнового импульса сжатия излучаемого в направлении подводного объекта импульсного луча, фокусируемого периферийной и центральной компонентами излучателя с образованием динамического звукового канала, причем импульс сжатия от центральной компоненты инициируют позже импульса сжатия от периферийной компоненты, а сдвиг между временами начала инициации от компонентов больше длительности фронта импульса сжатия от периферийной компоненты, при этом длительность волны от периферийного импульса сжатия больше длительности волны от центрального импульса сжатия. Предложено также устройство для осуществления данного способа [8], включающее электротехнический блок, корпусной блок, блок наведения луча с, гидроакустической системой с передающим и приемными элементами, блок питания, блок управления, импульсный конденсаторный накопитель, коммутатор, импульсный электродинамический излучатель с нагрузочными витками и излучающими внешними поверхностями диском и коаксиально охватывающей диск шайбой, внутренняя поверхность которых оппозитна к поверхности укладки нагрузочных витков, причем импульсный корпусной блок выполнен в виде двух коаксиальных цилиндров, между которыми расположен импульсный электродинамический излучатель, в каждом из коаксиальных цилиндров размещены конденсаторы накопителя с коммутаторами, каждый из которых соединен соответственно с нагрузочными витками диска и шайбы, при этом блок наведения луча имеет гидроцилиндры, эксцентрично размещенные с тыльной части диска и шайбы, причем передающий и приемные элементы закреплены на коаксиальных цилиндрах.
К недостаткам предлагаемого способа следует отнести способ наведения луча с помощью гидроцилиндров, который имеет ограничения по углу поворота импульсного электродинамического излучателя, и отсутствие возможности активного изменения дистанции между целевым объектом и устройством активной защиты.
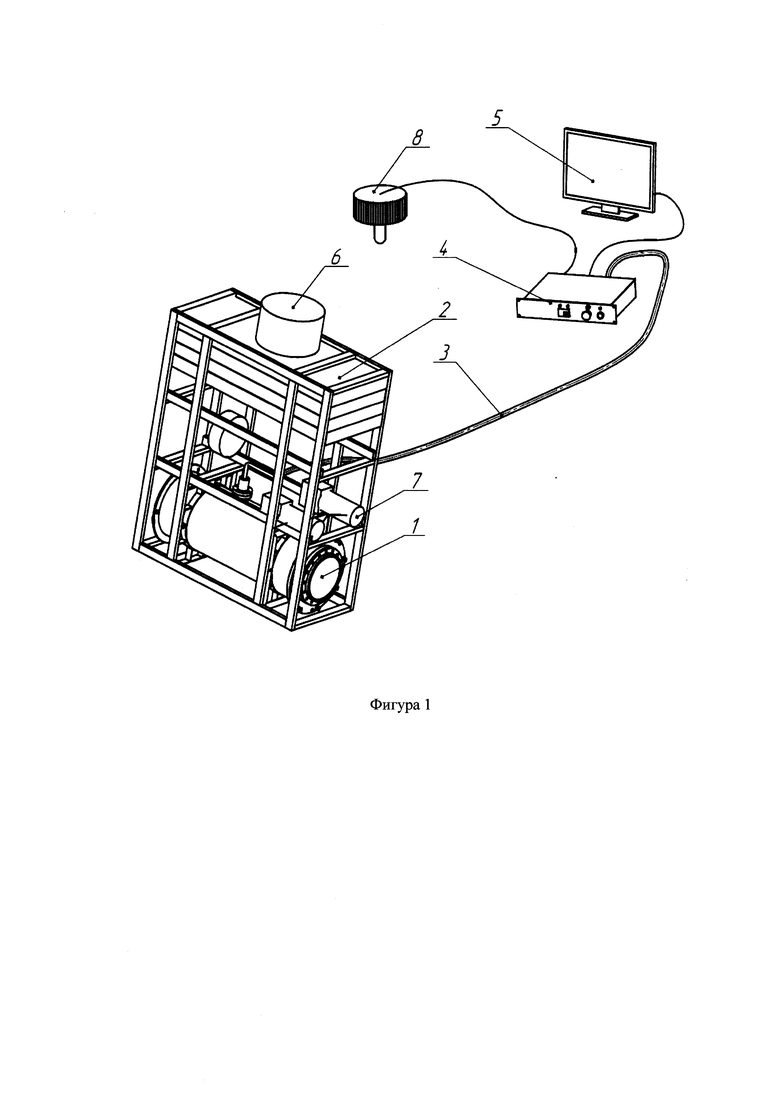
Отмеченные в прототипе и аналогах недостатки отсутствуют в предлагаемом способе пространственной ориентации системы нелетального воздействия (СНВ), состоящего в том (см. фиг. 1), что устройство активной защиты 1 акватории ударно-волновым воздействием на подводный объект (УАЗ), включающее подводный модуль, выполненный в герметичном корпусе и содержащий зарядное устройство, накопитель энергии, коммутатор разрядного тока, а также электродинамический индуктор с излучающим диском, установлено на погруженную в воду, свободно плавающую платформу 2, которая через кабельную линию 3 соединена с надводным (береговым) модулем 4, включающим источник электрической энергии и блок управления с монитором для визуализации 5.
При этом платформа оборудована ГЛОНАСС/GPS антенной 6 и одним поворотным или двумя стационарными движителями 7, а к блоку управления в свою очередь подключена гидроакустическая станция обнаружения подводных объектов (ГАС ОПО) 8, при этом наведение устройства активной защиты 1 на цель, выявленную ГАС ОПО, осуществляется подработкой одним поворотным или двумя стационарными движителями, установленными на платформе, по командам от блока управления на основе информации о текущем положении цели (от ГАС ОПО 8) и платформы (от ГЛОНАСС/GPS антенны 6).
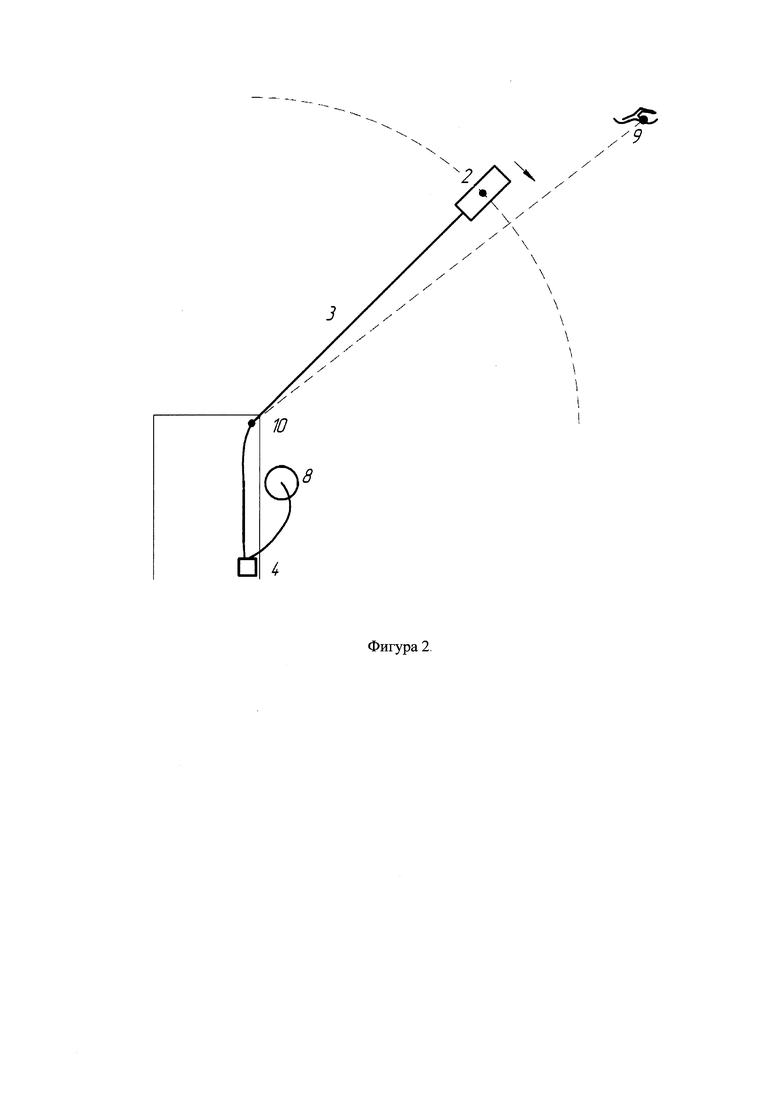
Способ наведения иллюстрирует фиг. 2. При постоянно работающих движителях кабельная линия 3, соединяющая свободно плавающую платформу 2 с надводным модулем 4, находится в натянутом состоянии. Перемещение платформы при наведении на движущуюся цель 9, информация о которой поступает с ГАС ОПО 8, происходит по окружности, с центром в месте фиксации кабеля 10, радиус которой определяется его выпущенной длиной. Подработка движетелями, установленными на платформе 2, осуществляется в направлении прямой 9-10 до тех пор, пока платформа 2 не окажется на этой прямой. При этом чем меньше выпущенная длина кабеля, тем быстрее производится наведение на цель, но чем больше выпущенная длина кабеля, тем ближе платформа с УАЗ может оказаться к цели и тем эффективнее будет его воздействие.
Длина кабельной линии, соединяющей платформу с надводным модулем, может меняться с помощью дополнительной лебедки, на которую наматывается кабель. Это позволяет в динамическом режиме менять радиус действия СНВ, приближая УАЗ к целевому объекту или удаляя от него, и тем самым обеспечивая наиболее эффективную дистанцию воздействия.
Платформа дополнительно к/(вместо) ГЛОНАСС/GPS антенне может быть оборудована гидроакустическим маяком ответчиком, сигнал которого регистрирует ГАС ОПО, и тем самым определяет пространственное положение платформы под водой. Данный способ при наличии у платформы балластной системы позволяет использовать платформу в толще воды в полностью погруженном состоянии, в том числе под ледовым покровом, и ориентировать УАЗ на цель.
Техническим результатом изобретения является простота реализации и возможность автоматического наведения УАЗ на цель в широком диапазоне углов, а также увеличение зоны действия УАЗ за счет изменения длины кабеля, которым платформа соединена с надводным (береговым) модулем.
Технический результат достигается за счет возможности ориентации платформы с помощью установленных на ней одного поворотного или двух стационарных движителей, по командам от блока управления на основе информации о текущем положении цели (от ГАС ОПО) и платформы (от ГЛОНАСС/GPS антенны). В другом варианте для позиционирования платформы в подводном положении вместо ГЛОНАСС/GPS антенны используется гидроакустический маяк-ответчик, сигнал которого регистрирует ГАС ОПО.
Данное техническое решение позволяет простыми средствами реализовать автоматическое наведение УАЗ на цель в широком диапазоне углов (вплоть до 360°), а также за счет изменения длины кабеля обеспечивает доставку УАЗ на оптимальную дистанцию для воздействия на целевой объект, обеспечивая расширение зоны его действия.
Список использованных источников
1. Патент на изобретение RU №2269449 (27.10.2008) Способ защиты охраняемой акватории от подводных диверсантов и устройство для его осуществления. «Тихоокеанский военно-морской институт им. С.О. Макарова» (RU).
2. Патент на изобретение RU №2337508 (27.10.2008) Способ защиты объектов водного базирования от несанкционированного проникновения. Федеральное государственное учреждение «12 Центральный научно-исследовательский институт Минобороны России» (RU).
3. Патент на изобретение №2339899 (27.11.2008) Способ и устройство электрогидравлического ударного воздействия на нарушителя в воде. Щербаков Григорий Николаевич (RU) и др.
4. Патент на изобретение №2451563 (27.05.2012) Устройство активного воздействия на нарушителей охраняемых акваторий. Открытое акционерное общество «Тетис Про» (RU).
5. Патент на полезную модель RU №176284 (15.01.2018) Средство активной защиты акваторий. Щербаков Григорий Николаевич (RU) и др.
6. Патент на изобретение №2585690 (10.06.2016) Способ активной защиты акватории ударно-волновым воздействием на подводный объект и устройство для его осуществления. Акционерное общество Научно-производственное объединение «Ударно-волновые технологии» (АО НПО «УВТ») (RU).
7. Патент на изобретение №2681967 (14.03.2019) Устройство активной защиты акватории ударно-волновым воздействием на подводный объект. Российская Федерация, от имени которой выступает Фонд перспективных исследований (RU).
8. Патент на изобретение №2696048 (30.07.2019) Способ активной защиты акватории ударно-волновым воздействием на подводный объект и устройство для его осуществления. Российская Федерация, от имени которой выступает Фонд перспективных исследований (RU).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство активной защиты акватории ударно-волновым воздействием на подводный объект | 2017 |
|
RU2681967C1 |
| УСТРОЙСТВО АКТИВНОГО ВОЗДЕЙСТВИЯ НА НАРУШИТЕЛЕЙ ОХРАНЯЕМЫХ АКВАТОРИЙ | 2010 |
|
RU2451563C1 |
| Способ активной защиты акватории ударно-волновым воздействием на подводный объект и устройство для его осуществления | 2017 |
|
RU2696048C2 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ АКВАТОРИИ УДАРНО-ВОЛНОВЫМ ВОЗДЕЙСТВИЕМ НА ПОДВОДНЫЙ ОБЪЕКТ | 2017 |
|
RU2671801C2 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ АКВАТОРИИ УДАРНО-ВОЛНОВЫМ ВОЗДЕЙСТВИЕМ НА ПОДВОДНЫЙ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2585690C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2574169C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ВНЕШНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2573173C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2568339C1 |
Изобретение относится к области гидроакустики и может быть использовано в системах активного воздействия на нарушителей охраняемых акваторий и надводных объектов. Способ обеспечения пространственной ориентации системы нелетального воздействия состоит в том, что устройство активной защиты акватории ударно-волновым воздействием на подводный объект, включающее подводный модуль, выполненный в герметичном корпусе и содержащий зарядное устройство, накопитель энергии, коммутатор разрядного тока, электродинамический индуктор с излучающим диском, устанавливают на погруженную в воду, свободно плавающую платформу, которая через кабельную линию соединена с надводным или береговым модулем, включающим источник электрической энергии и блок управления с монитором для визуализации. Платформу оборудуют движителями и балластной системой. К блоку управления подключают гидроакустическую станцию обнаружения подводных объектов. Техническим результатом является возможность автоматического наведения устройства на цель в широком диапазоне углов и увеличение зоны действия. 3 з.п. ф-лы, 2 ил.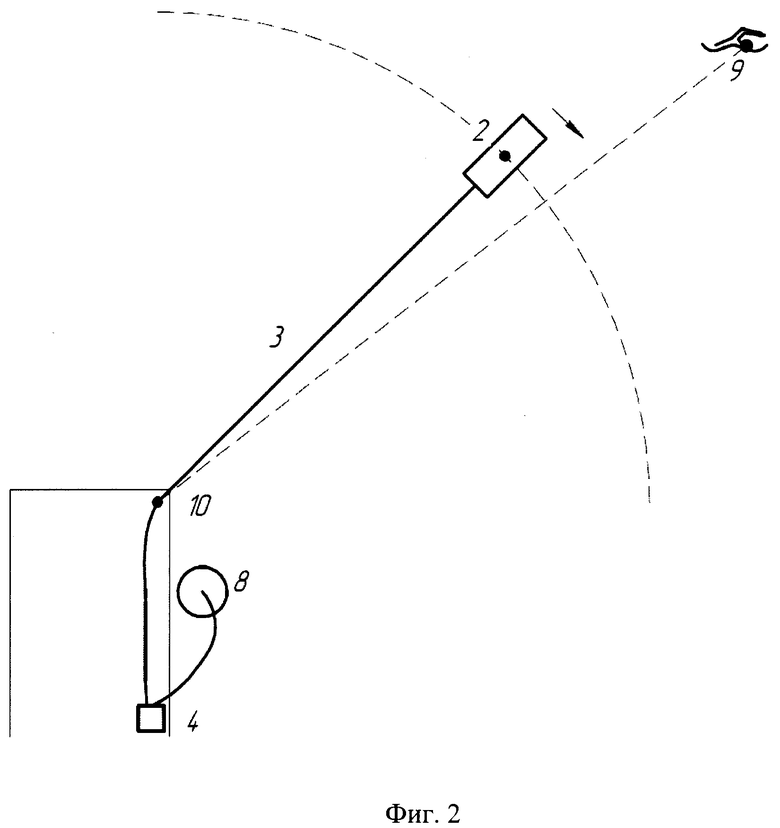
1. Способ обеспечения пространственной ориентации системы нелетального воздействия (СНВ), состоящий в том, что устройство активной защиты акватории ударно-волновым воздействием на подводный объект (УАЗ), включающее подводный модуль, выполненный в герметичном корпусе и содержащий зарядное устройство, накопитель энергии, коммутатор разрядного тока, а также электродинамический индуктор с излучающим диском, устанавливают на погруженную в воду, свободно плавающую платформу, которая через кабельную линию соединена с надводным или береговым модулем, включающим источник электрической энергии и блок управления с монитором для визуализации, при этом платформу оборудуют движителями и балластной системой, а к блоку управления в свою очередь подключают гидроакустическую станцию обнаружения подводных объектов (ГАС ОПО).
2. Способ по п. 1, отличающийся тем, что платформу оборудуют ГЛОНАСС/GPS антенной и/или гидроакустическим маяком-ответчиком, при этом автоматическое наведение устройства активной защиты (УАЗ) на цель, выявленную ГАС ОПО, осуществляется подработкой одним поворотным или двумя стационарными движителями, установленными на платформе, по командам от блока управления на основе информации о текущем положении цели от ГАС ОПО и платформы с ГЛОНАСС/GPS антенной и/или гидроакустическим маяком-ответчиком.
3. Способ по п. 2, отличающийся тем, что при постоянно работающих движителях кабельная линия, соединяющая платформу с надводным модулем, находится в натянутом состоянии, и перемещение платформы при наведении на цель происходит по окружности, радиус которой определяется выпущенной длиной кабеля.
4. Способ по п. 2, отличающийся тем, что длина кабельной линии, соединяющей платформу с надводным модулем, может меняться с помощью дополнительной лебедки, на которую наматывается кабель.
| УСТРОЙСТВО АКТИВНОГО ВОЗДЕЙСТВИЯ НА НАРУШИТЕЛЕЙ ОХРАНЯЕМЫХ АКВАТОРИЙ | 2010 |
|
RU2451563C1 |
| Устройство активной защиты акватории ударно-волновым воздействием на подводный объект | 2017 |
|
RU2681967C1 |
| Способ активной защиты акватории ударно-волновым воздействием на подводный объект и устройство для его осуществления | 2017 |
|
RU2696048C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СТЕПЕНИ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ В БЕЗРЕШЕТНОЙ МОЛОТКОВОЙ ДРОБИЛКЕ КОРМОВ | 2011 |
|
RU2470710C1 |
