Изобретение относится к области морской техники и может быть использовано для контроля подводной среды и охраны водных районов от морских объектов недружественных стран.
Известно, что для обнаружения морских подводных целей на флотах мира используют различные измерительные устройства, основанные на регистрации в водной среде объектов и присущих им физических полей. Из-за особенностей распространения в воде различных видов энергии наиболее широкое распространение получили гидроакустические средства наблюдения, основанные на законах распространения в воде звука.
В 1881 г. русский офицер С.О. Макаров изобрел флюктомер - первый гидроакустический прибор, измеряющий скорость течения и имеющий гидроакустический канал связи. Его же считают и изобретателем первого гидрофона для приема гидроакустических сигналов, создаваемых ходовыми шумами быстроходных минных катеров, которые в 1904 г. С.О. Макаров, уже будучи вице-адмиралом, предложил устанавливать на боковых ограждениях и дебаркадерах у входа в военно-морские базы для предварительного оповещения о нападении легких сил противника [1].
К началу Второй Мировой войны гидролокаторами было вооружено около 200 надводных кораблей различных классов в Великобритании и более 60 эсминцев в США. Дальность обнаружения ими подводных лодок не превышала 2 км. Подводные лодки оснащались в основном шумопеленгаторными станциями (ШПС) и могли обнаруживать крупные надводные корабли и суда на дистанциях до 10…20 км [1]. В дальнейшем гидролокаторы и шумопеленгаторы были объединены в гидроакустические станции (ГАС) и комплексы, с помощью которых стали производить поиск, обнаружение, классификацию морских целей и выдачу по ним целеуказания. ГАС подразделяются по месту установки на авиационные, автономные, корабельные, стационарные, а по назначению - на станции классификации целей, миноискания, помех, разведки и связи [2].
Известно, что для контроля подводной среды на флотах ведущих морских держав используются различные технические средства, как стационарные - стационарные гидроакустические системы, так и мобильные - корабельные и авиационные гидроакустические станции (ГАС) и комплексы, авиационные радиогидроакустические буи (РГБ), необитаемые подводные аппараты (НПА) [2], [3], [4].
В настоящее время к контролю подводной среды все чаще привлекаются НПА [4], [5]. НПА стали разрабатывать в конце 1960-х гг. К настоящему времени этот вид морской техники стал приоритетным и включает НПА, как автономные (АНПА), так и дистанционно управляемые [5]. В 1996 г. в США был создан АНПА нового поколения «Манта», предназначенный для обнаружения и уничтожения подводных лодок, мин и других подводных целей, а также ведения разведки, решения обеспечивающих и специальных задач [6]. Бортовая поисковая аппаратура АНПА включает гидролокаторы переднего и бокового обзора, цифровую видеокамеру, датчики для измерения параметров морской воды. Полученные данные записываются на жесткий магнитный накопитель для последующего анализа результатов после подъема АНПА на борт носителя. Двусторонняя связь АНПА с пунктом управления в позиционном положении обеспечивается системами спутниковой навигации и звукоподводной связи [7]. Пункт управления оборудован спускоподъемным устройством и автоматизированным рабочим местом оператора с персональным переносным компьютером, предназначенным для планирования операции, ввода данных и отображения на дисплее необходимой информации [6].
В 2004 г. в ВМС США приняты генеральный план разработки НПА и их классификация, согласно которой они подразделяют на легкие или переносные, малогабаритные, средние и крупные (см. табл. 1) [5].
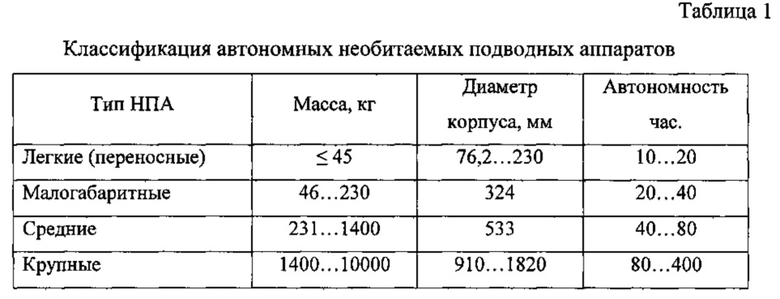
Современные АНПА имеют корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска подводных объектов, навигационное оборудование, средства связи, отсек для полезной нагрузки, приборы управления [8], [9]. Для передачи на пункт управления информации об обнаруженных подводных объектах АНПА оборудуют гидроакустической или радиотехнической аппаратурой связи. Погрешности координат обнаруживаемых АНПА подводных объектов зависят от точности работы их навигационной системы [9].
В настоящее время в ВМС США появились НПА с переменной плавучестью - глайдеры, имеющие автономность несколько месяцев и обладающие малой гидроакустической заметностью. Их оснащают бортовыми измерительно-информационными комплексами, периодически передающими данные измерений по каналам управления и связи на систему якорных донных станций (гидроакустический канал) или на космический аппарат при периодических всплытиях (радиотехнический канал). Такие НПА могут скрытно вести сбор необходимой информации, производя всплытие в позиционное положение через каждые 2-3 ч для связи с пунктом управления и уточнения своего местоположения [5].
Дистанционное управление НПА с пункта управления организуют в водной среде с использованием систем звукоподводной связи [7], акустических модемов [10], а также шифровых или реактивных шифровых зарядов [11].
Ориентацию АНПА в пространстве обеспечивают с помощью инерциальной навигационной системы (ИНС) [12]. При длительном функционировании точность работы бортовой навигационной аппаратуры постепенно снижается, поэтому АНПА оснащают дополнительно устройствами спутниковой [6] или гидроакустической навигации [13].
Множество элементов, находящихся в закономерных отношениях и связях друг с другом, и образующих определенную целостность, единство и подчиненность определенному организующему признаку, представляют собой систему [14]. Совокупность совместно функционирующих и взаимосвязанных технических устройств, включающая пункт управления, АНПА, ГАС, РГБ, средства связи и навигации, является системой освещения подводной обстановки (СОПО) [15], [16]. СОПО может быть мобильной и стационарной, иметь время функционирования от нескольких часов до нескольких месяцев и даже лет.
Однако СОПО является только информационной системой: по ее данным на пункте управления принимают решение о необходимых действиях в отношении обнаруженных ею объектов. Это обстоятельство определяет такой недостаток СОПО, как продолжительное время реакции от момента обнаружения цели до момента воздействия на нее оружием или иными средствами. Другим недостатком СОПО, основу которой составляют АНПА, имеющие движитель, является невысокая скрытность, обусловленная их акустической заметностью.
Известна поисковая воздушно-космическая система AOSP (Aerospace Ocean Surveillance Program), разработанная в США для поиска в море надводных кораблей (судов) и подводных лодок [17]. В состав системы входят пункт управления и космические (КА) или летательные (ЛА) аппараты, оборудованные телевизионной и оптоэлектронной аппаратурой, а также радиотехническими средствами поиска. Данная система является прототипом изобретения, ее главный недостаток - отсутствие морских поисково-охранных средств.
Целью изобретения является разработка системы охраны водного района, позволяющей обнаруживать приближающиеся к нему морские надводные и подводные объекты противника, передавать об этом информацию на пункт управления и морские поисковые средства для их выдвижения навстречу обнаруженным объектам и недопущения их в охраняемый район.
Для достижения цели изобретения предлагается система охраны водного района, включающая пункт управления, располагаемый на надводном корабле и/или береговом посту, космический или летательный аппарат, оборудованный телевизионными, оптоэлектронными и радиотехническими средствами поиска морских надводных и подводных объектов, имеющий линию связи с пунктом управления, отличающаяся тем, что в ее состав включается самоходный автономный необитаемый подводный аппарат (АНПА), оснащенный гидроакустическими и телевизионными средствами поиска морских объектов, средствами звукоподводной связи, зарядом взрывчатого вещества и устройством его инициирования, буем-ретранслятором с приемо-передающим устройством, имеющим положительную плавучесть и связанным с АНПА тросом и оптоволоконным кабелем с катушкой, устройством отсоединения буя, регулирующим глубину его всплытия за счет длины вытравливаемого троса и кабеля, резаком для обрезания троса и кабеля, пункт управления дополнительно оборудуется пусковой установкой, вычислительным устройством и реактивными снарядами со средствами звукоподводной связи, охраняемый район оснащается гидроакустической навигационной системой.
Буй-ретранслятор обеспечивает двустороннюю связь АНПА с космическим или летательным аппаратом и пунктом управления.
Заряд взрывчатого вещества и устройство его инициирования предназначены для поражения морского объекта.
Пусковая установка служит для пуска АНПА и реактивных снарядов со средствами звукоподводной связи: акустическим модемом [18] или шифровым зарядом [11], предназначенными для управления АНПА, когда линия связи через буй-ретранслятор не действует.
Вычислительное устройство предназначено для расчета маршрута АНПА, координат обнаруженного морского объекта, а также точек прицеливания реактивных снарядов со средствами звукоподводной связи.
Техническое осуществление предлагаемой системы охраны водного района и взаимодействие ее элементов между собой поясняется чертежом, на котором:
Фиг. 1 - состав системы охраны водного района.
На фиг. 1 показан состав предлагаемой системы охраны водного района. Основные ее элементы: 1 - пункт управления, 2 - КА (ЛА), 3 - морской объект, 4, 5 - канал контроля морского объекта поисковыми средствами КА или ЛА, 4 - излученный сигнал, 5 - первичный или вторичный (отраженный) сигнал морского объекта, 6 - линия связи пункта управления с КА (ЛА), 7 - приемо-передающее устройство связи, 8 - АНПА, 9 - линия прицеливания для стрельбы реактивным снарядом со средством звукоподводной связи, 10 - средство звукоподводной связи, 11 - линия передачи команды от средства звукоподводной связи на АНПА, 12 - приемник звукоподводной связи АНПА, 13 - буй-ретранслятор, 14 - трос (буйреп) и кабель, 15 - линия связи АНПА с КА (ЛА), 16 - маяк гидроакустической навигационной системы, 17 - линия визирования маяка ГАС (ШПС) АНПА, 18 - гидроакустическая станция АНПА, 19, 20 - канал контроля морского объекта ГАС АНПА, в котором 19 - излучающий сигнал гидролокатора АНПА, 20 - первичный или вторичный (отраженный) сигнал морского объекта.
Предлагаемая система охраны водного района имеет высокую скрытность, обеспечивает обнаружение морского объекта противника, приближающегося к охраняемому району, и наведение на него дежурного автономного необитаемого подводного аппарата для предотвращения входа объекта в охраняемый район.
Источники информации
1. Корж И.Г. Зарождение и развитие отечественного гидроакустического противодействия и подавления. Диссертация на соискание ученой степени кандидата технических наук. Санкт-Петербургский филиал Института истории естествознания и техники им. С.И. Вавилова РАН. СПб.: 2010. http://www.dissercat.com/content/zarozhdenie-i-razvitie-otechestvennogo-gidroakusticheskogo-protivodeistviya-i-podavleniya
2. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. С. 102.
3. Сурнин В.В., Пелевин Ю.Н., Чулков В.Л. Противолодочные средства иностранных флотов. - М.: Воениздат, 1991.
4. Автономные подводные аппараты. Материалы сайта Института проблем морских технологий Дальневосточного отделения РАН, 2002. http.//imtp.febras.ru/anpa/imtp_anv/anv_history.html
5. И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88. http://pentagonus.ucoz.ru/_pu
6. Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008.
7. Система звукоподводной связи с подводной лодкой, лежащей на грунте // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 109-110.
8. Многоцелевой автономный подводный аппарат.// ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 59.
9. Перспективный необитаемый подводный аппарат ВМС США // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 75, СПб, 2015. С. 50. - http://unmannedsystemstechnology.com
10. Акустический модем АМ-300. http://www.diveservice.ru/
11. Патент RU 2510355 C2. Реактивный шифровой заряд (варианты)/ Новиков А.В., Цапко С.А. - М.: ФИПС, 2014. Бюл. №9.
12. Инерциальная навигационная система // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 108-109.
13. Матвиенко Ю.В. Гидроакустический комплекс навигации подводного робота. Диссертация на соискание ученой степени доктора технических наук. - Владивосток, 2004. http://dissercat.com/content/gidroakusticheskii-kompleks-navigatsii-podvodnogo-robota#ixzz2fPt3Bsov
14. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. С. 391.
15. Патент RU 2578807 C2. Способ освещения подводной обстановки / Новиков А.В., Корнеев Г.Н., Королев В.Э. - М.: ФИПС, 2016. Бюл. №9.
16. Разработка системы совместно действующих необитаемых подводных аппаратов // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 75, СПб, 2015. С. 48-49. - http://blog.navaldrones.com
17. Н. Гаврилин. Использование космических средств наблюдения в ВМС США // Зарубежное военное обозрение №9, 1975. С. 74-80.
18. Заявка на изобретение №2014109532. Способ управления подводным объектом / А.В. Новиков. - М.: ФИПС, 2015. Бюл. №26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| СПОСОБ ОХРАНЫ ПОДВОДНОГО ОБЪЕКТА | 2016 |
|
RU2659213C2 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |

Изобретение относится к области морской техники и может быть использовано для контроля подводной среды и охраны водных районов от морских объектов недружественных стран. Система охраны водного района включает в себя пункт управления, располагаемый на надводном корабле и/или береговом посту, космический или летательный аппарат, оборудованный телевизионными, оптоэлектронными и радиотехническими средствами поиска морских надводных и подводных объектов, имеющий линию связи с пунктом управления. В состав системы также входит самоходный автономный необитаемый подводный аппарат (АНПА), оснащенный гидроакустическими и телевизионными средствами поиска морских объектов, средствами звукоподводной связи, зарядом взрывчатого вещества и устройством его инициирования, буем-ретранслятором с приемо-передающим устройством, имеющим положительную плавучесть и связанным с АНПА тросом и оптоволоконным кабелем с катушкой, устройством отсоединения буя, регулирующим глубину его всплытия за счет длины вытравливаемого троса и кабеля, резаком для обрезания троса и кабеля. Пункт управления дополнительно оборудуется пусковой установкой, вычислительным устройством и реактивными снарядами со средствами звукоподводной связи, охраняемый район оснащается гидроакустической навигационной системой. Достигается высокая скрытность, обеспечение обнаружения морского объекта противника, приближающегося к охраняемому району, и наведение на него дежурного автономного необитаемого подводного аппарата для предотвращения входа объекта в охраняемый район. 1 табл., 1 ил.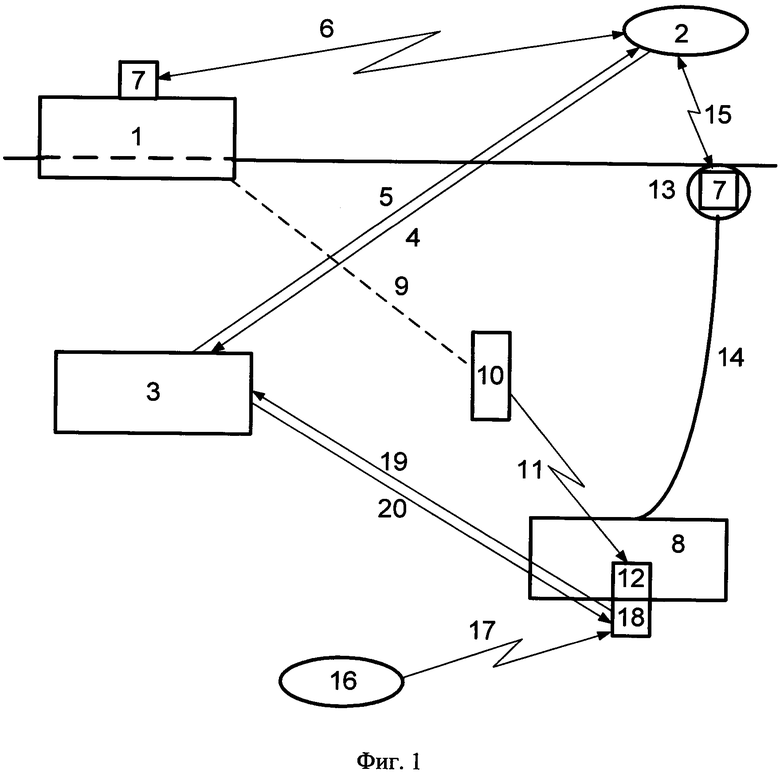
Система охраны водного района, включающая пункт управления, располагаемый на надводном корабле и/или береговом посту, космический или летательный аппарат, оборудованный телевизионными, оптоэлектронными и радиотехническими средствами поиска морских надводных и подводных объектов, имеющий линию связи с пунктом управления, отличающаяся тем, что в ее состав включается самоходный автономный необитаемый подводный аппарат (АНПА), оснащенный гидроакустическими и телевизионными средствами поиска морских объектов, средствами звукоподводной связи, зарядом взрывчатого вещества и устройством его инициирования, буем-ретранслятором с приемо-передающим устройством, имеющим положительную плавучесть и связанным с АНПА тросом и оптоволоконным кабелем с катушкой, устройством отсоединения буя, регулирующим глубину его всплытия за счет длины вытравливаемого троса и кабеля, резаком для обрезания троса и кабеля, пункт управления дополнительно оборудуется пусковой установкой, вычислительным устройством и реактивными снарядами со средствами звукоподводной связи, охраняемый район оснащается гидроакустической навигационной системой.
| RU 2014109532 A, 20.09.2015 | |||
| Способ классификации эхосигналов для систем охранной сигнализации водного района | 1991 |
|
SU1838803A3 |
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| KR 20150133482 A, 30.11.2015 | |||
| GB 2177352 A, 21.01.1987. | |||

