Изобретение относится к машиностроению, а именно к механизмам с мускульным приводом.
Известен механизм с мускульным приводом по патенту №2048365, МКИ В 62 М 9/08, 1995 г., содержащий ведущее колесо переменного радиуса, ведомую звездочку, охватываемую цепью, укрепленное на раме устройство натяжения цепи, ведущее колесо переменного радиуса, состоящее из подвижных в радиальном направлении секторов с закрепленными на их концах круглыми звездочками.
Недостатком данного изобретения является незначительный диапазон изменения передаточных отношений, пульсации момента в силу того, что ведущая звездочка выполнена многогранной и усложненный алгоритм изменения передаточных отношений.
Наиболее близким по технической сущности и достигаемому результату - прототипом, является механизм по а.с. №1643307, МКИ В 62 М 9/06, 1991 г., содержащий ведущую звездочку, выполненную из упругих элементов, которые при передаче тягового усилия деформируются, уменьшая диаметр ведущей звездочки, автоматически увеличивая передаточное отношение.
Недостатком данного механизма является малое изменение передаточного отношения и невозможность адаптации привода к физическим возможностям пользователя.
Задачей данного изобретения является расширение диапазона изменения передаточного отношения и возможность адаптации к физическим возможностям пользователя.
Поставленная задача решается благодаря тому, что мускульный привод, выполненный в виде устройства для автоматического изменения передаточного отношения, согласно формулы изобретения, состоит из двух дифференциалов, самотормозящей передачи, подтормаживающего устройства, датчика усилия и натяжителя пружины, при этом привод выполнен в виде силовой дифференциальной зубчатой передачи, вход которой через датчик усилия соединен с входным валом, регулирующий вход с ведомым звеном самотормозящей передачи, ведущее звено которой соединено с выходом второго дифференциала, вход которого соединен с входом силового дифференциала, регулирующий вход второго дифференциала соединен с подтормаживающим устройством, которое соединено с датчиком усилия, который имеет натяжитель пружины.
Указанная совокупность признаков является новой и обладает изобретательским уровнем так, как мускульный привод, выполненный в виде силовой дифференциальной зубчатой передачи, вход которой через датчик усилия соединен с входным валом, а регулирующий вход с ведомым звеном самотормозящей передачи позволяет изменять передаточные отношения в широком диапазоне. Использование натяжителя пружины позволяет адаптировать механизм к физическим возможностям пользователя.
Самотормозящая передача работает в режиме оттормаживания, выполняя роль механического усилителя, когда ведущее звено убегает от набегающего на него ведомого звена, задавая скорость вращения последнего. Чем ближе самотормозящая передача выполнена к границе самоторможения, тем меньшее усилие необходимо для управления усилителем и тем соответственно выше коэффициент усиления (Благонравов А.А. Механические бесступенчатые передачи нефрикционного типа. - М.: Машиностроение, 1977, с.59).
На чертеже схематично представлен предлагаемый мускульный привод.
Мускульный привод состоит из силового дифференциала 1, регулирующего дифференциала 2, самотормозящей передачи 3, подтормаживающего устройства 4, датчика усилия 5, натяжителя пружины 6, выходного вала 7, входного вала 8, вала 9, 15, шестерен 10, 11, 12, 13, 14, 16, 17, 18, 21, 24, 26, ведущего звена 22, ведомого звена 23, механической связи 20, пружины 19.
Мускульный привод работает следующим образом.
По силовой кинематической цепи 8-5-9-10-11-12-7 вращение с входного вала 8 передается на выходной вал 7, одновременно по управляющей кинематической цепи 8-5-9-13-14-15-16-17-18-26-4 вращение передается на подтормаживающее устройство 4, находящееся в расторможенном состоянии. При этом звенья 25-24-23-22-21 неподвижны и механизм находится в положении прямой передачи. При возрастании нагрузки на выходном валу 7, усилие по силовой кинематической цепи передается на датчик усилия 5 и при превышении величины усилия свыше величины, заданной характеристикой датчика 5 и жесткостью пружины 19, последняя начинает сжиматься и датчик усилия 5 через связь 20 замыкает подтормаживающее устройство 4, заставляя вращаться шестерню 21. Шестерня 21, соединенная с ведущим звеном 22 самотормозящей передачи 3, начинает вращаться, позволяя вращаться ведомому звену 23, находящемуся под нагрузкой, передаваемой на него с силового дифференциала 2 по кинематической цепи 25-24-23.
Обороты выходного вала 7 снижаются и устанавливается некое передаточное отношение механизма, соответствующее данной нагрузке и препятствующее увеличению нагрузки на входном валу 8. Изменяя величину поджатия пружины 19 натяжителем 6, можно подстраивать механизм под физические возможности пользователя.
Таким образом, данный механизм позволяет изменять передаточное отношение в широких пределах и подстраиваться под физические возможности пользователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2291992C1 |
| УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛ | 2004 |
|
RU2276299C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2276298C1 |
| ЛЕБЕДКА | 2004 |
|
RU2268235C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2283243C1 |
| МЕХАНИЗМ ПОВОРОТА ПРЕИМУЩЕСТВЕННО ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2286281C1 |
| МЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ | 2004 |
|
RU2287731C2 |
| УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛ | 2009 |
|
RU2411155C2 |
| МЕХАНИЗМ ПОВОРОТА | 2009 |
|
RU2411154C2 |
| УСТРОЙСТВО ДЛЯ БЕССТУПЕНЧАТОГО ИЗМЕНЕНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ В РЕДУКТОРЕ НЕФРИКЦИОННОГО ТИПА | 2002 |
|
RU2251040C2 |
Изобретение относится к устройствам для автоматического изменения передаточного отношения без разрыва потока мощности и может быть использовано на велосипедах. В приводе содержатся два дифференциала. Между входным валом (8) и общим входом обоих дифференциалов - силового дифференциала (1) и регулирующего второго дифференциала (2) расположен датчик усилия (5), который включает при повышении нагрузки вращающееся вхолостую при прямой передаче подтормаживающее устройство (4), соединенное с регулирующим входом второго дифференциала (2). При этом начинает вращаться выходная шестерня (21) второго дифференциала (2), а самотормозящая передача (3) перестает стопорить водило (25) силового дифференциала (1). Привод автоматически переключается с прямой передачи на передачу с измененным передаточным отношением. Момент переключения может регулироваться натяжителем (6) пружины (19) датчика усилия. Техническое решение направлено на облегчение подбора понижающей передачи в широком диапазоне передаточных чисел в зависимости от индивидуальных возможностей пользователя. 1 ил.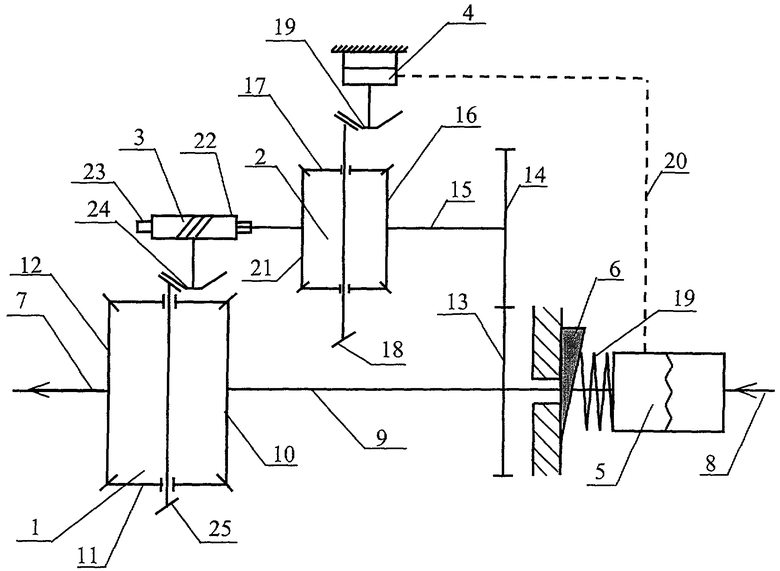
Мускульный привод, выполненный в виде устройства для автоматического изменения передаточного отношения, отличающийся тем, что он состоит из двух дифференциалов - силового дифференциала и регулирующего второго дифференциала, самотормозящей передачи, подтормаживающего устройства, датчика усилия и натяжителя пружины, при этом привод выполнен в виде силовой дифференциальной зубчатой передачи, вход которой через датчик усилия соединен с входным валом, имеется регулирующий вход силового дифференциала, связанный с ведомым звеном самотормозящей передачи, ведущее звено которой соединено с выходом второго дифференциала, вход которого кинематически соединен с входом силового дифференциала, регулирующий вход второго дифференциала соединен с подтормаживающим устройством, которое соединено с датчиком усилия, который имеет натяжитель пружины.
| US 5976052 А, 02.11.1999 | |||
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Система балансировочных валов для двухцилиндрового четырехтактного двигателя (варианты) | 2021 |
|
RU2753431C1 |
| ВТУЛКА ВЕЛОСИПЕДНОГО КОЛЕСА СО ВСТРОЕННЫМ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ (ВАРИАНТЫ) | 1998 |
|
RU2226475C2 |

