Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам.
Известен механизм поворота по патенту РФ №2109650, МКИ B62D 11/08, 27.04.98 бюл. №12, содержащий суммирующие планетарные ряды, первые звенья которых связаны между собой валом и с двигателем через коробку передач с электрогидравлическим управлением, вторые звенья соединены с движителями, а третьи звенья через двухстороннюю коническую зубчатую передачу с гидромотором регулируемой гидрообъемной передачи, гидронасос которой связан с двигателем и органом управления поротом машины.
Недостатками данного механизма являются сложный алгоритм управления и сложная гидравлическая система.
Наиболее близким по технической сущности и достигаемому результату-прототипом является механизм по А.С. №1803341, МКИ B62D 11/18, 23.03.93, бюл. №11, содержащий механический дифференциал с ведущим и управляющими звеньями, а так же ведомыми, взаимодействующими с полуосями привода движителей две регулируемые, гидравлически сообщенные одна с другой объемные гидромашины, валы которых постоянно связаны с управляющими звеньями дифференциалов, и систему управления гидромашинами.
Недостатками данного механизма являются сложная конструкция, высокая стоимость гидромашин и недостаточная их надежность.
Задачей изобретения является упрощение конструкции и облегчение управления.
Поставленная задача решается тем, что управляемый дифференциал, содержащий дифференциал и механизм регулирования, согласно формуле изобретения, механизм регулирования содержит две самотормозящие передачи и два шаговых электродвигателя. Ведомые звенья самотормозящих передач соединены с центральными колесами дифференциала. Ведущие звенья самотормозящих передач соединены с шаговыми электродвигателями, при этом самотормозящие передачи работают в режиме оттормаживания.
Указанная совокупность признаков является новой и обладает изобретательским уровнем, так как управляемый дифференциал выполнен в виде дифференциальной передачи и механизма регулирования. Дифференциал делит на два потока подводимую к нему мощность. Самотормозящие передачи, создавая момент сопротивления вращению одного из центральных колес дифференциала, заставляют его перераспределять скорости вращения между центральными колесами. При этом самотормозящие передачи работают в режиме оттормаживания (усиления) и могут выполняться, например, по А.С. №1083015. Механизм регулирования работает следующим образом. Если принять скорость вращения входного звена дифференциала за единицу, то сумма скоростей вращения центральных колес дифференциала будет равна двум единицам. При условии, что самотормозящие передачи выполнены с передаточным числом равным единице, сумма скоростей вращения шаговых электродвигателей должна быть равна двум единицам. При изменении скорости вращения одного шагового электродвигателя скорость вращения второго шагового электродвигателя так же меняется, при этом сумма скоростей вращения остается неизменно равной двум единицам. Неизбежно присутствующие компоненты, необходимые для работы и управления шаговыми электродвигателями, такие как контроллер, энкордер, блок управления шаговым двигателем и прочие, опущены.
На чертеже схематично представлен управляемый дифференциал.
Управляемый дифференциал состоит из дифференциала 1 с центральными колесами 2, 3, входного звена 13, стеллитов 4; самотормозящих передач 5, 6 с ведущими звеньями 9, 10 и ведомыми звеньями 7, 8; шаговых электродвигателей 11, 12.
Управляемый дифференциал работает следующим образом. Вращение от привода подают на входное звено 13 дифференциала 1. Далее по кинематической цепи 13-4-2-8 вращение подают на ведомое звено 8 самотормозящей передачи 6, а по кинематической цепи 13-4-3-7 - на ведомое звено 7 самотормозящей передачи 5, при этом скорости вращения ведомых звеньев 7 и 8 равны. Шаговые электродвигатели 11 и 12 имеют одинаковую скорость вращения и вращают ведущие звенья 9 и 10. Ведущие звенья 9 и 10 не создают препятствий для вращения ведомых звеньев 7 и 8. Таким образом, механизм поворота находится в равновесном состоянии и гусеничная машина движется прямолинейно. Для поворота гусеничной машины уменьшают скорость вращения шагового электродвигателя 11, соединенное с ним ведущее звено 9 так же уменьшает скорость вращения, создавая препятствие для вращения ведомого звена 7. Что в конечном итоге приводит к уменьшению скорости вращения центрального колеса 3. В дифференциале 1 происходит перераспределение скоростей вращения между центральными колесами 3 и 2, и центральное колесо 2 увеличивает скорость вращения, при этом сумма скоростей вращения центральных колес 3 и 2 остается прежней. Ведомое звено 8, соединенное с центральным колесом 2, так же увеличивает скорость вращения. Одновременно с этим шаговый электродвигатель 12 увеличивает скорость вращения и соединенное с ним ведущее звено 10 так же увеличивает скорость вращения, не создавая препятствия для вращения ведомого звена 8. При этом сумма скоростей вращения шаговых электродвигателей остается прежней. Таким образом происходит поворот гусеничной машины. В режиме прямолинейного движения при изменении нагрузки на одну из сторон дифференциала 1 он в силу своей конструктивной особенности пытается перераспределить скорости вращения между центральными колесами 2 и 3. То из центральных колес, которое пытается увеличить скорость вращения, встречает препятствие со стороны ведущего звена самотормозящей передачи.
Поскольку скорости вращения ведущих звеньев равны и жестко заданы шаговыми электродвигателями, то скорости вращения центральных колес дифференциала не изменяются, и сохраняется прямолинейность движения гусеничной машины.
Таким образом, предложенный управляемый дифференциал позволяет упростить конструкцию и облегчить управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОВОРОТА | 2009 |
|
RU2411154C2 |
| МЕХАНИЗМ ПОВОРОТА ПРЕИМУЩЕСТВЕННО ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2286281C1 |
| УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛ | 2004 |
|
RU2276299C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2291992C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2283243C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2276298C1 |
| МЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ | 2004 |
|
RU2287731C2 |
| МУСКУЛЬНЫЙ ПРИВОД | 2004 |
|
RU2270780C2 |
| МЕХАНИЗМ ПОВОРОТА | 2010 |
|
RU2441792C1 |
| ЛЕБЕДКА | 2004 |
|
RU2268235C2 |
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам. Управляемый дифференциал содержит дифференциал и механизм регулирования. Механизм регулирования содержит две самотормозящие передачи и два шаговых электродвигателя. Ведомые звенья самотормозящих передач соединены с центральными колесами дифференциала. Ведущие звенья самотормозящих передач соединены с шаговыми электродвигателями. Самотормозящие передачи работают в режиме оттормаживания. Достигается упрощение конструкции управляемого дифференциала. 1 ил.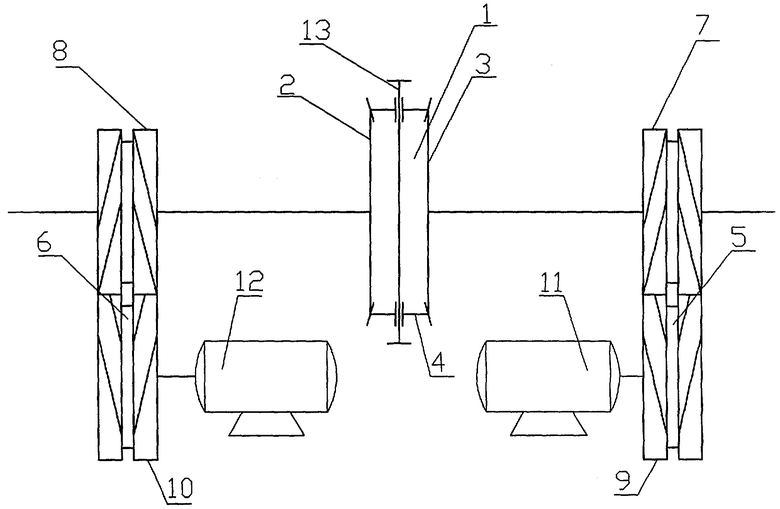
Управляемый дифференциал, содержащий дифференциал и механизм регулирования, отличающийся тем, что механизм регулирования содержит две самотормозящих передачи и два шаговых электродвигателя, при этом ведомые звенья самотормозящих передач соединены с центральными колесами дифференциала, ведущие звенья самотормозящих передач соединены с шаговыми электродвигателями, а самотормозящие передачи работают в режиме оттормаживания.
| МЕХАНИЗМ ПОВОРОТА ПРЕИМУЩЕСТВЕННО ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2286281C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА | 1971 |
|
SU428971A1 |
| МАСЛЯНЫЙ ФИЛЬТР | 2016 |
|
RU2635426C2 |
| US 2007068710 А1, 29.03.2007. | |||

