Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам.
Известен механизм поворота по патенту РФ №2109650, МКИ B 62 D 11/08, 27.04.98 бюл. №12, содержащий суммирующие планетарные ряды, первые звенья которых связаны между собой валом и с двигателем через коробку передач с электрогидравлическим управлением, вторые звенья соединены с движителями, а третьи звенья через двустороннюю коническую зубчатую передачу с гидромотором регулируемой гидрообъемной передачи, гидронасос которой связан с двигателем и органом управления поворотом машины.
Недостатками данного механизма являются сложный алгоритм управления и сложная гидравлическая система.
Наиболее близким по технической сущности и достигаемому результату - прототипом является механизм по АС №1803341, МКИ B 62 D 11/18, 23.03.93 бюл. №11, содержащий механический дифференциал с ведущим и управляющими звеньями, а также ведомыми, взаимодействующими с полуосями привода движителей, две регулируемые, гидравлически сообщенные одна с другой объемные гидромашины, валы которых постоянно связаны с управляющими звеньями дифференциалов, и систему управления гидромашинами.
Недостатком данного механизма является сложная конструкция.
Задачей изобретения является упрощение конструкции, расширение функциональных возможностей и облегчение управления.
Поставленная задача решается тем, что управляемый дифференциал, содержащий силовой дифференциал и механизм регулирования, согласно формуле изобретения, содержит две самотормозящие передачи, ведомые звенья которых жестко связаны с ведомыми звеньями силового дифференциала, механизм регулирования выполнен в виде регулирующего дифференциала и регуляторов, ведомые звенья регулирующего дифференциала соединены с ведущими звеньями самотормозящих передач и регуляторами, а ведущие звенья силового и регулирующего дифференциала соединены с приводом, при этом самотормозящие передачи работают в режиме оттормаживания.
Указанная совокупность признаков является новой и обладает изобретательским уровнем, так как управляемый дифференциал выполнен в виде силовой дифференциальной передачи, вход которой соединен с приводом, а ведомые звенья жестко соединены с выходными валами и ведомыми звеньями самотормозящих передач. Ведущие звенья самотормозящих передач соединены с ведомыми звеньями регулирующего дифференциала и регуляторами, а ведущие звенья силового и регулирующего дифференциалов соединены с приводом.
При этом самотормозящие передачи работают в режиме оттормаживания, выполняя роль механических усилителей, когда ведущее звено убегает от набегающего на него ведомого звена, задавая скорость вращения последнего. Чем ближе самотормозящая передача выполнена к границе самоторможения, тем меньшее усилие необходимо для управления усилителем и тем соответственно выше коэффициент усиления. (Благонравов А.А. Механические бесступенчатые передачи нефрикционного типа. - М: Машиностроение, 1977, с.59). Регуляторы могут выполняться как гидравлическими, так и фрикционными, или любого другого принципа действия, являясь фактически подтормаживающими устройствами, они позволяют перераспределить обороты между ведомыми звеньями регулирующего дифференциала и ведущими звеньями самотормозящих передач, а ведомые звенья самотормозящих передач перераспределяют обороты между ведомыми звеньями силового дифференциала.
На чертеже схематично представлен управляемый дифференциал.
Механизм управляемого дифференциала состоит из силового дифференциала 1 с ведущим звеном 22, ведомыми звеньями 17, 18 и сателлитами 24, регулирующего дифференциала 2 с ведущим звеном 23, ведомыми звеньями 19, 20 и сателлитами 25, а также самотормозящих передач 3,4 с ведущими звеньями 13, 14 и ведомыми звеньями 15, 16. В состав механизма также входят регуляторы 5, 6, шестерни 9, 10, 11, 12, 21 и выходные валы 7, 8.
Работает механизм следующим образом.
Вращение от привода подают на шестерню 21. Далее вращение подают по силовой кинематической цепи 21-22-24-18-16-8 на выходной вал 8, по другой кинематической цепи 21-22-24-17-15-7 вращение подают на выходной вал 7. Одновременно с этим по кинематической цепи 21-23-25-20-12-10-14 вращение подают на ведущее звено 14 самотормозящей передачи 4, а по цепи 21-23-25-20-12-10-6 - на регулятор 6. По кинематической цепи 21-23-25-19-11-9-13 вращение передают на ведущее звено 13 самотормозящей передачи 3, а по цепи 21-23-25-19-11-9-5 - на регулятор 5. При этом выходные валы 7, 8 вращаются с одинаковой скоростью. При воздействии на регулятор 6 он снижает обороты и ведущее звено 14 самотормозящей передачи 4 также снижает обороты и не успевает убегать от ведомого звена 16, жестко соединенного с ведомым звеном 18 дифференциала 1. В силовом дифференциале 1 происходит перераспределение оборотов между ведомыми звеньями 17 и 18. Ведомое звено 18 снижает обороты, а ведомое звено 17 соответственно увеличивает. Одновременно с этим в регулирующем дифференциале 2 также происходит перераспределение оборотов между ведомыми звеньями 20 и 19, и ведущее звено 13 самотормозящей передачи 3 успевает убегать от ведомого звена 15, и выходной вал 8 замедляется, а выходной вал 7 ускоряется.
При полной блокировке регулятора 6 останавливается ведущее звено 14, а также ведомое звено 16 самотормозящей передачи 4 и соответственно ведомое звено 18 дифференциала 1, а ведомое звено 17 получает удвоенные обороты.
Аналогичным образом при подтормаживании регулятора 5 происходит уменьшение скорости вращения выходного вала 7 и пропорциональное увеличение скорости вращения выходного вала 8.
Таким образом, предложенный механизм позволяет жестко задавать скорость вращения выходных валов, упростить конструкцию, облегчить ее управление и расширить функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2276298C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2291992C1 |
| МЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ | 2004 |
|
RU2287731C2 |
| МЕХАНИЗМ ПОВОРОТА ПРЕИМУЩЕСТВЕННО ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2286281C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2283243C1 |
| МУСКУЛЬНЫЙ ПРИВОД | 2004 |
|
RU2270780C2 |
| МЕХАНИЗМ ПОВОРОТА | 2009 |
|
RU2411154C2 |
| ЛЕБЕДКА | 2004 |
|
RU2268235C2 |
| УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛ | 2009 |
|
RU2411155C2 |
| УСТРОЙСТВО ДЛЯ БЕССТУПЕНЧАТОГО ИЗМЕНЕНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ В РЕДУКТОРЕ НЕФРИКЦИОННОГО ТИПА | 2002 |
|
RU2251040C2 |
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам. Управляемый дифференциал содержит силовой дифференциал, механизм регулирования и две самотормозящие передачи. Ведомые звенья самотормозящих передач жестко связаны с ведомыми звеньями силового дифференциала. Механизм регулирования выполнен в виде регулирующего дифференциала и регуляторов. Ведомые звенья регулирующего дифференциала соединены с ведущими звеньями самотормозящих передач и регуляторами. Самотормозящие передачи работают в режиме оттормаживания. В результате достигается упрощение конструкции, расширение функциональных возможностей и облегчение управления. 1 ил.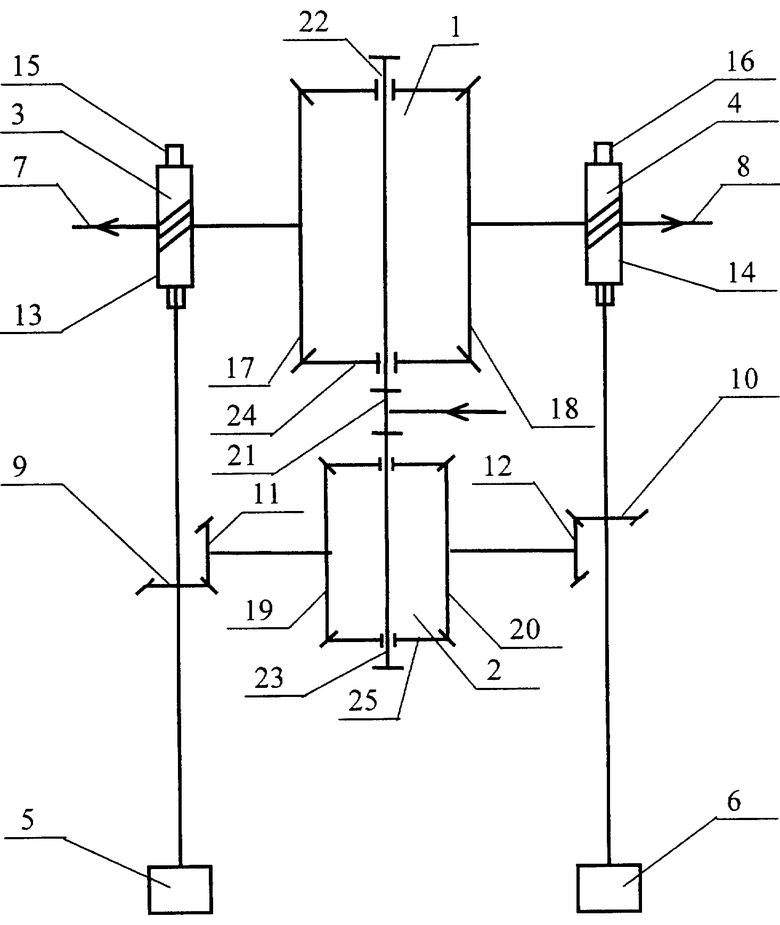
Управляемый дифференциал, содержащий силовой дифференциал и механизм регулирования, отличающийся тем, что он содержит две самотормозящие передачи, ведомые звенья которых жестко связаны с ведомыми звеньями силового дифференциала, механизм регулирования выполнен в виде регулирующего дифференциала и регуляторов, а ведомые звенья регулирующего дифференциала соединены с ведущими звеньями самотормозящих передач и регуляторами, при этом самотормозящие передачи работают в режиме оттормаживания.
| Механизм поворота | 1989 |
|
SU1803341A1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО ПОВОРОТА ТРАНСПОРТНОЙ МАШИНЫ (ВАРИАНТЫ) | 2002 |
|
RU2224677C1 |
| УСТРОЙСТВО ДЛЯ БЕССТУПЕНЧАТОГО ИЗМЕНЕНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ В РЕДУКТОРЕ НЕФРИКЦИОННОГО ТИПА | 2002 |
|
RU2251040C2 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| US 2003079928 A1, 01.05.2003. | |||

