Изобретение относится к радиоизмерительной технике и может быть использовано в ракетной, космической, авиационной технике и многих областях машиностроения, где требуется проведение непрерывного контроля и сжатие данных измерения.
Известен способ контроля параметров нестационарных измерительных сигналов по а.с. №669492, МКИ G 05 D 19/02, при котором измерительные сигналы задерживают на время анализа, сравнивают каждое текущее значение измерительного сигнала с предшествующими значениями измерительного сигнала и при превышении разностью значений допустимой величины формируют метку-сигнал об отклонении соответствующего параметра измерительного сигнала за допуск, при этом перед формированием метки сигнала дополнительно сравнивают каждое текущее значение измерительного сигнала последовательно со значениями всех предшествующих задержанных на время анализа измерительных сигналов и при текущем значении каждого измерительного сигнала, большем значения каждого задержанного сигнала, формируют вспомогательный сигнал, подсчитывают количество вспомогательных сигналов, в соответствии с которым формируют пропорциональный суммарный сигнал, задают верхний и нижний пороговые сигналы, суммарный сигнал сравнивают с верхним и нижним пороговыми сигналами, при значении суммарного сигнала, большем верхнего порогового сигнала, формируют контрольный сигнал о выходе соответствующего параметра в сторону увеличения и при значении суммарного сигнала, меньшем нижнего порогового сигнала, формируют контрольный сигнал о выходе соответствующего параметра измерительного сигнала за допуск в сторону уменьшения.
Недостатком известного способа является невозможность получения результатов анализа информации в темпе ее поступления для проведения контроля на космической станции, в связи с большими вычислениями при проведении операций последовательного сравнения измерительных сигналов со всеми предшествующими.
Задача, стоящая перед предлагаемым способом, - повышение надежности получения сжатой анализированной информации в темпе ее поступления с датчиков в реальном астрономическом времени.
Поставленная задача решается тем, что перед началом проведения эксперимента с применением бортовой автономной многоканальной системы контроля динамических процессов подключают к системе "n" датчиков, расположенных в различных по длине сечениях космической станции, замеряющих микроускорения или перегрузки, бортовое питание и настраивают систему на рабочие уровни путем ввода первой метки для анализа информации, соответствующей пороговому уровню и второй метки, соответствующей предельному уровню амплитуд для анализа динамического процесса, регистрируют время начала эксперимента или начала работы системы, соответствующее астрономическому времени работы космической станции и включают систему в автономный режим работы, при этом в системе усиливают замеренные сигналы с "n" датчиков и фильтруют их до заданного диапазона частоты фильтрации, преобразовывают каждый замеренный сигнал с "n" датчиков в цифровой код, анализируют цифровую информацию по заданному алгоритму, по которому каждый сигнал, поступающий в систему с частотой (например, 50 герц), сравнивают с заданным сигналом, соответствующим первой метке и, в случае текущего сигнала меньше заданной первой метки, формируют сигнал о времени несущественной информации А<А пор. и продолжают анализ сигналов с датчиков до получения величин сигналов, превысивших первую метку, при этом формируют сигнал о времени конца несущественной информации, запоминают время начала и конца поступления несущественной информации и все сигналы, не превысившие А пор. в системе, исключают, а поступившие сигналы, превысившие первую метку А>А пор., последовательно каждый сравнивают с предшествующим сигналом, определяют экстремальный сигнал и формируют сигнал, пропорциональный амплитуде колебаний, и сигнал, пропорциональный времени формирования экстремума, запоминают все экстремальные сигналы по уровням для анализа амплитуд и подсчитывают количество циклов, а при поступлении замеренных сигналов с датчиков, пропорциональных второй метке, соответствующей предельному уровню амплитуд колебаний А>А пред., формируют команду в систему для регистрации информации о процессах по всем замеряемым параметрам с увеличенной частотой регистрации, например 200 герц в течение 5 секунд, и формируют сигнал о регистрации предельного уровня для визуального наблюдения, свидетельствующего о нештатном нагружении, а всю информацию о результатах анализа системой запоминают и хранят до сброса по каналам связи на Землю в удобное для приема время, затем процесс анализа продолжают в установленной способом последовательности.
Кроме того, при анализе системой информации в автономном режиме работы, космонавт изменяет режим формирования информации, при котором по группе датчиков устанавливает вторую метку, соответствующую малым пределам нагружений на космическую станцию, например, для проведения эксперимента с контролем усилий, развиваемых космонавтом при выполнении им физических упражнений на тренажере, при этом регистрируют процессы по всем датчикам и анализируют информацию при эксперименте, причем по окончании эксперимента систему снова переключают в автономный режим работы, обеспечивая непрерывный мониторинг.
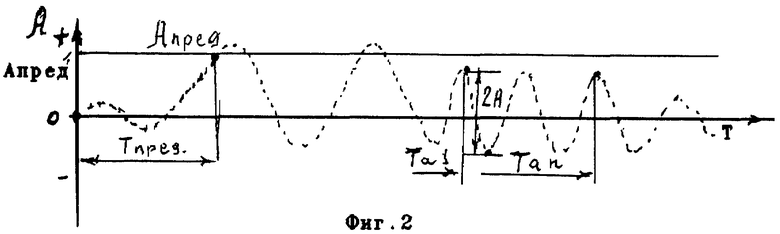
На фиг.1 представлен процесс сжатия анализируемой информации по этапам, на фиг.2 - процесс получения анализируемой информации по всем датчикам.
Предлагаемый способ позволяет получать необходимую информацию с космической станции в процессе ее эксплуатации. Причем вся информация поступает на землю, анализированная, сжатая по этапам.
После подключения "n" датчиков и бортового питания к многоканальной системе, последнюю настраивают на рабочие уровни, при которых устанавливают первую метку, которая соответствует пороговому уровню А пор., и все сигналы, не достигшие порогового уровня (первой метки) не анализируются, чем достигается большой коэффициент сжатия информации.
Отмечают время несущественной информации Т пор., которое соответствует отсутствию нагрузок на космическую станцию.
После выделения существенной информации, превысившей пороговый уровень А пор, осуществляется анализ циклических нагружений, которые превысили пороговый уровень, но не достигли предельного значения, при этом определяется время одного цикла - Т цикл.
На фиг.1 показаны значения А пор., А мах, А пред., Т пор., Т цикл.
Т пор. соответствует времени окончания поступления несущественной информации и выходу параметра в режим, при котором производится анализ циклических нагружений: определяются максимальные амплитуды колебаний А мах, замеренной информации, периоды колебаний Т цикл.
Все результаты анализа информации запоминаются по уровням и после выделения экстремальных значений подсчитывают количество циклов нагружений на космическую станцию.
С помощью операции фильтрации сигналов получают информацию о колебаниях космической станции в диапазоне частот, соответствующих частотам конструкции, что особенно важно для анализа состояния конструкции. При этом анализируют последовательно сигналы, их сравнивают и определяют сигналы, соответствующие предельному уровню.
А пред. и их превысившие, которые соответствуют экспериментальным значениям при колебаниях конструкции при нештатном нагружении.
При этом формируют команду для регистрации всех процессов с большой частотой опроса параметра, причем вся информация по другим параметрам, которая возможно не достигла предельного уровня, регистрируется также с большой частотой опроса для дальнейшего анализа на земле. При этом осуществляется непрерывный контроль состояния конструкции.
При поступлении информации о предельных уровнях формируют подробную информацию с частотой регистрации, например 200 герц в течение 5 секунд (фиг.1). Такая информация необходима для проведения подробного анализа замеренных процессов и выявления причин нештатного нагружения.
На фиг.2 представлена группа процессов с частотой регистрации больше 200 Гц.
Вся анализированная и сжатая информация накапливается и передается в удобное для приема на Земле время. Эта информация сохраняется, требует значительно меньше времени для передачи и существенно сокращает время анализа на Земле.
Кроме того, космонавт может самостоятельно проводить эксперименты, а результат анализа видеть на дисплее. В этом случае, уровни для анализа устанавливаются таким образом, чтобы была возможность получить больше информации по данным измерения, которую подвергают также анализу для получения характеристик при эксперименте, обеспечивая непрерывный мониторинг.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ПРИЕМА, АНАЛИЗА И ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2005 |
|
RU2313816C2 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ОБРАБОТКИ И СОКРАЩЕНИЯ ИЗБЫТОЧНОСТИ ДАННЫХ ИЗМЕРЕНИЙ | 2004 |
|
RU2271033C1 |
| РАДИОТЕХНИЧЕСКИЙ СПОСОБ КОНТРОЛЯ НАГРУЖЕНИЙ КОНСТРУКЦИИ И ЕЕ ВЫНОСНЫХ ЭЛЕМЕНТОВ ПРИ ЭКСПЛУАТАЦИИ | 2004 |
|
RU2293440C2 |
| БОРТОВАЯ АВТОНОМНАЯ СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ НЕПРЕРЫВНОГО АНАЛИЗА И РЕГИСТРАЦИИ ИНФОРМАЦИИ | 2004 |
|
RU2271034C1 |
| МНОГОКАНАЛЬНАЯ АВТОНОМНАЯ СИСТЕМА ДЛЯ АНАЛИЗА И РЕГИСТРАЦИИ ДИНАМИЧЕСКИХ ПРОЦЕССОВ | 2004 |
|
RU2271031C1 |
| КОМПЛЕКС СБОРА И АНАЛИЗА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ ДЛЯ МОНИТОРИНГА БЕЗОПАСНОСТИ ОБЪЕКТОВ | 2007 |
|
RU2337391C1 |
| АВТОНОМНЫЙ ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ КОНТРОЛЯ ПРЕДУПРЕЖДЕНИЯ НЕШТАТНЫХ СИТУАЦИЙ ОБЪЕКТОВ | 2006 |
|
RU2318235C1 |
| Способ контроля параметров нестационарных измерительных сигналов | 1977 |
|
SU669492A1 |
| Устройство для сжатия и восстановления информации | 1977 |
|
SU720461A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ МОДЕМА МАЛОРАЗМЕРНОГО КОСМИЧЕСКОГО АППАРАТА С НАЗЕМНЫМ ЦЕНТРОМ УПРАВЛЕНИЯ ПОЛЕТАМИ СПУТНИКОВОЙ СВЯЗНОЙ СИСТЕМЫ | 2012 |
|
RU2520352C2 |
Изобретение относится к радиоизмерительной технике и может быть использовано в ракетной, космической, авиационной технике, где требуется проведение непрерывного контроля и сжатие данных измерения. Способ контроля нагружений конструкции при эксплуатации космической станции с применением бортовой автономной многоканальной системы для контроля динамических процессов заключается в том, что измерительные сигналы задерживают на время анализа, сравнивают каждое текущее значение измерительного сигнала с предшествующими их значениями и при превышении разности значений допустимой величины формируют метку - сигнал об отклонении соответствующего параметра измерительного сигнала за допуск, перед началом проведения эксперимента к бортовой автономной многоканальной системе подключают "n" датчиков, расположенных в различных по длине сечениях космической станции и замеряющих микроускорения или перегрузки, бортовое питание и настраивают систему на рабочие уровни путем ввода первой метки для анализа информации, соответствующей пороговому уровню, и второй метки, соответствующей предельному уровню для анализа динамического процесса, регистрируют время начала эксперимента или начала работы системы, соответствующее астрономическому времени работы космической станции, и включают систему в автономный режим работы, при этом в системе усиливают замеренные сигналы с "n" датчиков и фильтруют их до заданного диапазона частоты фильтрации, преобразовывают каждый замеренный сигнал с "n" датчиков в цифровой код, анализируют цифровую информацию по заданному алгоритму, по которому каждый сигнал, поступивший в систему с частотой (например, 50 герц), сравнивают с заданным сигналом, соответствующим первой метке и, в случае текущего сигнала меньше заданной первой метки, формируют сигнал о времени несущественной информации А<А пор. и продолжают анализ сигналов с датчиков до получения величин сигналов, превысивших первую метку, при этом формируют сигнал о времени конца несущественной информации, запоминают время начала и конца поступления несущественной информации и все сигналы, не превысившие А пор. в системе, исключают, а поступившие сигналы, превысившие первую метку А>А пор., последовательно каждый сравнивают с предшествующим сигналом, определяют экстремальный сигнал и формируют сигнал, пропорциональный амплитуде колебаний, и сигнал, пропорциональный времени формирования экстремума, запоминают все экстремальные сигналы по уровням для анализа амплитуд и подсчитывают количество циклов, а при поступлении замеренных сигналов с датчиков, пропорциональных второй метке, соответствующей предельному уровню амплитуд колебаний А>А пред., формируют команду в систему для регистрации информации о процессах по всем замеряемым параметрам с увеличенной частотой регистрации, например 200 герц в течение 5 секунд, и формируют сигнал о регистрации предельного уровня для визуального наблюдения, свидетельствующего о нештатном нагружении, а всю информацию о результатах анализа системой запоминают и хранят до сброса по каналам связи на Землю в удобное для приема время, затем процесс анализа продолжают в установленной способом последовательности. Предлагаемый способ позволяет получать необходимую информацию с космической станции в процессе ее эксплуатации. 1 з.п. ф-лы, 2 ил.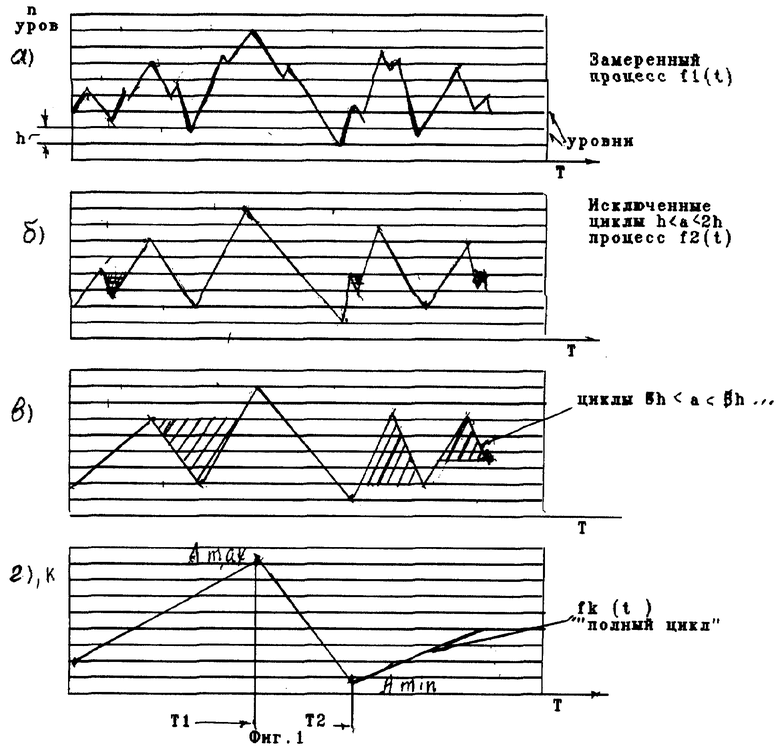
| Способ контроля параметров нестационарных измерительных сигналов | 1977 |
|
SU669492A1 |
| Способ контроля динамической системы | 1973 |
|
SU459763A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАТЕРИАЛОВ ЭЛЕМЕНТОВ КОНСТРУКЦИИ | 2001 |
|
RU2204817C1 |
| СПОСОБ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ С ИСПОЛЬЗОВАНИЕМ СВЧ-ЭНЕРГИИ | 2010 |
|
RU2422018C1 |
| US 5942750 A1, 24.08.1999. | |||

