Область техники
Заявленное изобретение относится к квазиглобальным спутниковым связным системам (ССС) и может быть использовано для повышения надежности канала связи малоразмерного космического аппарата (МКА) с центром управления полетом (ЦУП).
Уровень техники
Перспективным направлением для связи МКА с Землей является использование ССС общего назначения (ГЛОБАЛСТАР, ИРИДИУМ, ИНМОРСАТ, ОРБКОММ и др.). Однако эти системы обладают существенным недостатком -сеансы связи возможны только в определенные временные промежутки. Точный расчет времени сеансов связи и передача расписания включений на борт МКА является сложной технической задачей, поэтому наибольший интерес представляют системы автономного управления включением МКА, по сигналам с телеметрических датчиков.
Из уровня техники известна система для передачи телеметрической информации (см. авторское свидетельство СССР на изобретение №1836708, опубл.23.08.1993). Функциональная схема системы для передачи телеметрической информации с борта КА приведена на фиг.1.
Система функционирует следующим образом.
Во время полета космического аппарата (КА) на выходах датчиков ускорения (1), скорости (2) и высоты (3) образуются сигналы, величины которых пропорциональны текущим значениям ускорения, скорости и высоты полета. В компараторах (4-6) текущие значения сигналов сравниваются с пороговыми значениями, характеризующими критические участки полета, на которых крайне затруднительно или невозможно поддержание устойчивой радиосвязи. Если сигналы с датчиков (1-3) превышают пороговые значения, то на выходах компараторов (4-6) появляются низкие потенциалы. Сигналы с компараторов (4-6) интегрируются интеграторами (7-9) и поступают на счетные входы триггеров (ID-12), и далее на входы схемы совпадения «И» (13). На критических участках полета, когда связь неустойчива, на выходе схемы совпадения «И» (13) присутствует нулевой потенциал. Исполнительное устройство (14) отключает передатчик. Когда показания датчиков ускорения (1), скорости (2) и высоты (3) вернутся к норме, передатчик включается.
Недостатком известного технического решения является то, что по сигналам с имеющихся датчиков нельзя установить факт нахождения КА в зоне радиовидимости спутника-ретранслятора и наземной станции. Это приводит к неудачным сеансам связи даже на не критических участках полета.
Раскрытие изобретения
Техническим результатом заявленного изобретения является повышение надежности канала связи малоразмерного космического аппарата (МКА) с центром управления полетом (ЦУП) за счет автоматического проведения сеансов связи при наличии зоны взаимной радиовидимости, значительное сокращение числа неудачных сеансов связи МКА с ЦУП за счет введения на борту МКА дополнительного логического устройства для автоматического управления работой модема ССС.
Технический результат достигается тем, что система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы содержит модем с приемопередающей антенной, логическое устройство, состоящее из интегратора, компаратора, логической схемы совпадения «И» и ключ бортовой вычислительной машины малоразмерного космического аппарата, при этом первый выход модема (первый порт) соединен с входом интегратора, выход которого соединен с входом компаратора, выход которого соединен с первым входом логической схемы совпадения «И», второй выход модема (второй порт) соединен со вторым входом логической схемы совпадения «И», выход которой через ключ бортовой вычислительной машины соединен с входом модема.
Краткое описание чертежей
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
На фиг.1 - функциональная схема системы для передачи телеметрической информации с борта КА (аналог), где:
1 - датчик ускорения;
2 - датчик скорости;
3 - датчик высоты;
4 - первый компаратор;
5 - второй компаратор;
6 - третий компаратор;
7 - первый интегратор;
8 - второй компаратор;
9 - третий компаратор;
10 - первый триггер;
11 - второй триггер;
12 - третий триггер;
13 - схема совпадения «И»;
14 - исполнительное устройство.
На фиг.2 - структурная схема заявленной системы автоматического управления работой модема, где:
15 - модем с приемопередающей антенной;
16 - интегратор;
17 - компаратор;
18 - схема совпадения «И»;
19 - ключ бортовой вычислительной машины малоразмерного космического аппарата-наноспутника.
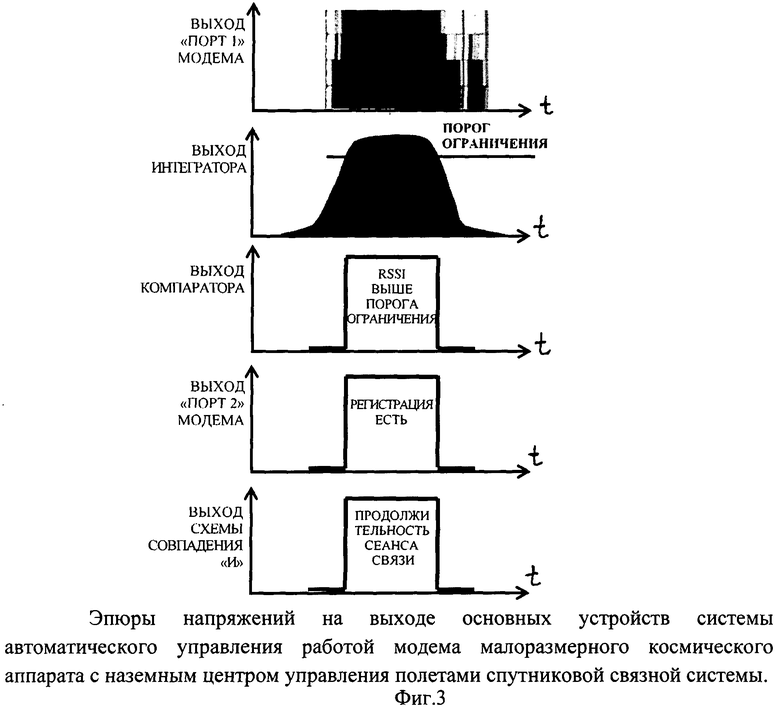
На фиг.3 - эпюры напряжений на выходе основных устройств системы автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой системы связи.
Осуществление изобретения
Сущность и принцип работы заявленной системы автоматического управления работой модема рассмотрим на примере ССС ГЛОБАЛСТАР.
В общем потоке информации, поступающей на борт МКА, кроме основной имеется и служебная информация (СИ), предназначенная для обеспечения работоспособности системы ГЛОБАЛСТАР. С помощью специально разработанного программного обеспечения (ПО), установленного на борту спутника, происходит выделение сигналов СИ из общего потока информации. В результате последующей обработки СИ в логическом устройстве (ЛУ) по заранее выработанным алгоритмам происходит формирование команд на ключ бортовой вычислительной машины (БВМ) МКА, которая управляет включением модема. Таким образом, время начала и продолжительность сеансов связи определяется бортовым ЛУ в автоматическом режиме и не зависит от команд из ЦУПа. Расчета времени сеансов связи не требуется. Во время сеансов связи кроме основной информации с МКА в этом режиме в ЦУП передается и СИ сети ГЛОБАЛСТАР. Наличие СИ позволит повысить точность послеполетной обработки результатов летно-конструкторских испытаний (ЛКИ) спутника. Режим может быть использован на борту МКА в качестве дополнительного к основному.
В спутниковой системе связи для определения благоприятных условий проведения сеансов связи используются сигналы служебной информации (СИ). СИ поступает на модем ССС, находящийся на МКА одновременно с основным сигналом.
Нахождение МКА в зоне радиовидимости (ЗРВ) определяется на борту по результатам обработки сигналов служебной информации (СИ) в логическом устройстве (ЛУ). СИ поступает на модем из ССС одновременно с основным сигналом.
Наличие устойчивой связи в системе ГЛОБАЛСТАР определяется следующими сигналами СИ:
1. RSSI.
Сигнал качества канала связи «Спутник - КА ГЛОБАЛСТАР - наземная станция сопряжения». Вырабатывается модемом на основе анализа приходящих сигналов от сети ГЛОБАЛСТАР. Амплитуда сигнала RSSI для обеспечения устойчивой связи должна быть не менее 3-х единиц шкалы «Уровень сигнала»;.
2. Сигнал «Регистрация».
Поступает на модем после окончания процесса регистрации модема в сети ГЛОБАЛСТАР. Одновременно с сигналом «Регистрация» на модем приходит информация о номере наземной станции сопряжения (СС), через которую осуществляется связь.
В пользовательском (однопортовом) режиме модема выделение сигналов СИ не предусмотрено. Для выделения сигналов СИ применена двухпортовая конфигурация модема.
Сигналы с порта 1 модема поступают на ЛУ, состоящее из последовательно соединенных интегратора, компаратора и логической схемы совпадения «И».
Интегратор осуществляет хранение нескольких последних отчетов уровня поступающего сигнала (RSSI) и вычисляет их средне-арифметическое значение. Оптимальное количество отчетов (n=10) выбрано экспериментальным путем исходя из необходимой достоверности полученных результатов и минимального времени анализа RSSI. Компаратор сравнивает текущее средне-арифметическое значение сигнала RSSI на входе с пороговым значением, записанным во внутренней памяти. В случае равенства (или превышения) уровня входного сигнала порогового значения на выходе компаратора устанавливается уровень логической единицы. Оптимальное пороговое значение, установленное в результате проведенных экспериментов, равно А=3,2-3,5. В ходе проведения ЛКИ спутника имеется возможность программного изменения порогового значения.
С выхода компаратора сигнал поступает на один из входов схемы совпадения «И». На другой вход поступает сигнал «Регистрация» с порта 2 модема.
Все устройства ЛУ реализованы на программном уровне.
Во время полета спутника бортовой модем ГЛОБАЛСТАР работает в дежурном режиме с включенным приемником. В момент вхождения спутника в зону взаимной радиовидимости (ЗРВ) «Спутник - КА ГЛОБАЛСТАР - СС» на «Порте управления» модема появляется сигнал RSSI. Далее RSSI поступает на интегратор. Известно, что начало (и окончание) сеанса связи характеризуется резкими изменениями уровня RSSI, что приводит к неустойчивой связи. Для устранения этого явления в систему автоматического управления работой модема включено интегрирующее звено. Амплитуда сигнала на выходе интегратора равна средне-арифметическому значению десяти текущих отсчетов уровня RSSI. Затем компаратор сравнивает текущее значение сигнала с заданным пороговым значением. В случае превышения порога на выходе компаратора формируется уровень логической единицы. При наличии логических единиц одновременно на обоих входах схемы совпадения «И» на ее выходе также формируется уровень логической единицы. Затем положительное напряжение в виде команды поступает на ключ, находящийся в БВМ для включения модема в рабочий режим. Происходит обмен информацией между спутником и наземным ЦУПом. При выходе из ЗРВ уровень RSSI падает до нуля. На выходе логической схемы «И» формируется уровень логического нуля. Ключ БВМ прерывает сеанс связи и переводит модем в дежурный режим.
Таким образом, по сравнению с известными из уровня техники техническими решениями заявленная система автоматического управления работой модема имеет целый ряд преимуществ:
- не требуется наземного расчета времени сеансов связи с последующей передачей расписания включений на борт МКА;
- увеличивается число и продолжительности сеансов связи за счет более точного определения начала и окончания сеанса;
- обеспечивается более высокая достоверность обмена информацией, поскольку сеансы связи проходят только при достаточно высоком качестве канала связи, определяемого уровнем RSSI;
- существенно уменьшается энергопотребление за счет сокращения числа неудачных сеансов связи. В условиях ограниченной емкости бортовых батарей питания это преимущество имеет существенное значение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи | 2019 |
|
RU2713293C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ В ПОЛЕТЕ И НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2588178C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ПОЛЕТАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2010 |
|
RU2438941C1 |
| Система персональной подвижной спутниковой связи на основе сети низкоорбитальных спутников-ретрансляторов, обеспечивающая предоставление доступа в сеть Internet с носимого персонального абонентского терминала | 2021 |
|
RU2754947C1 |
| Способ многоконтурного управления космическими аппаратами связи и система для его реализации | 2017 |
|
RU2729152C2 |
| Спутниковая система, управляемая по межспутниковой радиолинии | 2018 |
|
RU2690966C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| НАЗЕМНЫЙ МОБИЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2001 |
|
RU2188508C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ТЕСТИРОВАНИЯ КАНАЛА УПРАВЛЕНИЯ БОРТОВОЙ АППАРАТУРОЙ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2653670C1 |

Изобретение относится к системам связи с использованием квазиглобальных спутниковых связных систем (ССС) и может быть использовано для повышения надежности канала связи малоразмерного космического аппарата (МКА) с центром управления полетом (ЦУП). Технический результат заключается в значительном сокращении числа неудачных сеансов связи МКА с ЦУП. Это достигается введением на борту МКА дополнительной системы автоматического управления работой модема ССС. Система автоматического управления работой модема содержит логическое устройство (ЛУ), выполненное на программном уровне. ЛУ обрабатывает по определенным алгоритмам сигналы служебной информации, поступающие на модем из ССС одновременно с основным сигналом. В результате на выходе ЛУ формируется команда управления на ключ, управляющий включением модема. Основные технические параметры заявленной системы были подтверждены в ходе проведения экспериментальных работ на созданном «Имитаторе наноспутника» с использованием ССС ГЛОБАЛСТАР. 3 ил.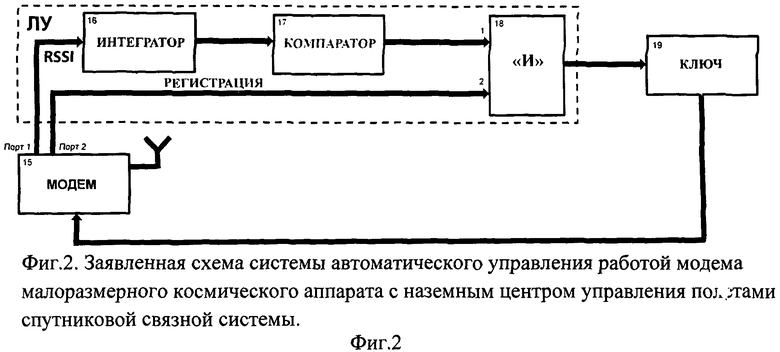
Система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы содержит модем с приемопередающей антенной, логическое устройство, состоящее из интегратора, компаратора и логической схемы совпадения «И», и ключ, при этом первый порт модема соединен с входом интегратора, выход которого соединен с входом компаратора, выход которого соединен с первым входом логической схемы совпадения «И», второй порт модема соединен со вторым входом логической схемы совпадения «И», выход которой через ключ соединен с входом модема.
| Правильно-отбортовочный автомат | 1957 |
|
SU116293A1 |
| Система для передачи телеметрической информации | 1991 |
|
SU1836708A3 |
| Изолятор | 1929 |
|
SU20177A1 |
| US 6161203 A, 12.12.2000 | |||

