1
Предложенный способ относится к области автоматики и контрольно-измерительной тех«ики.
Известен способ контроля динамической системы путем подачи на ее вход единичного скачка -и .измерения выходного -сигнала с заданным тактом о.проса.
Однако оценка качества динамической .системы по такому споСобу проводится ло нескольким численным показателям переходного процесса, что требует сложной аппаратуры контроля и снижает ее быстродействие.
Предложенный способ отличается тем, что, с целью повышения быстродействия контроля, определяют приращение амплитуды выходного Сигнала за такт опроса, формируют разность между текущим и начальным приращением выходного сигнала, сравнивают полученную разность с допустимым значением и фиксируют превышение разности приращений сигналов над допустимым значением.
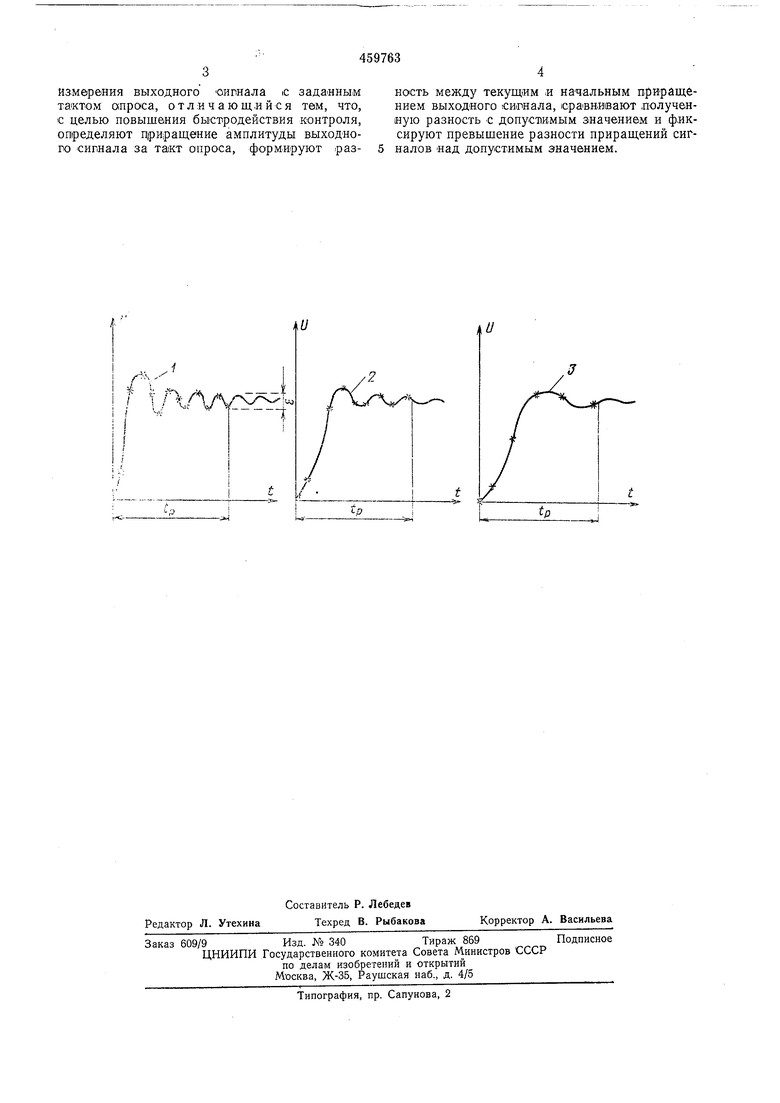
Графики переходных процессов, иллюстрирующие сущность предложенного способа, представлены на чертеже. Рассмотрим три различные динамические jHa вход :которых был подан одинаимпульс. Тогда на выходе -- йяснг1л, например.
Выходной сигнал каждой динамической ситемы опрашивается с одинаковой частотой, авной частоте тактового генератора. Вследтвие разброса параметров контролируемых
систем выходной сигнал каждой системы имеет различный характер, а это приводит к то.му, что лри измерении кривых на каждой из них за одинаковый интервал времени /р выделяется различное число точек аппроксимаЦИ.И. Так, для .первой динам.ической системы кривая на ее выходе характеризуется большими колебаниями и малым декрементом затухания. Это соответствует большому значению k и, как следствие, выделению большого ч.иела точек аппроксимации. Вторая система менее динамична, т. е. декремент ее затухания больше, а значение k меньше. В результате на этой кривой выделено меньшее число точек. Вследствие высокого качества третьей
системы она имеет еще больш1ий декремент затухания, значительно меньшее значение k, т. е. на кривой процесса выделяется наименьшее число точек, которое меньше допустимого, что свидетельствует о годности третьей динамической системы.
Предмет изобретения
Способ контроля динамической системы путем лодачи на ее вход единичного скачка и
измерения выходного оигаала ic заданным тактом апроса, отличающийся тем, что, с целью повышения быстродействия контроля, определяют при ращение амплитуды выходного сигнала за такт опроса, формируют .разность между текущим и начальным приращением выходного си.гнала, сравнивают полученную разность с допуст1И.мым значением и фиксируют превышение разности приращений сигналов «ад допустимым значением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1987 |
|
SU1413537A1 |
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ И МОМЕНТА ЭЛЕКТРОПРИВОДА | 1996 |
|
RU2096905C1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
| Способ автоматического контроля цифровых систем автоматического управления | 1988 |
|
SU1654782A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
| СПОСОБ ЗАЩИТЫ ТЯГОВОЙ СЕТИ ПОСТОЯННОГО ТОКА ПО ПРИРАЩЕНИЮ ТОКА | 1999 |
|
RU2161355C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МЕДИЦИНСКИЙ ТЕРМОМЕТР | 2004 |
|
RU2255314C1 |
| Способ управления процессом графитации | 1985 |
|
SU1312074A2 |
| Устройство для контроля параметров объектов | 1989 |
|
SU1695270A1 |
kU
,/
Г ААЛ
1
i -Р
