Изобретение относится к грузоподъемным устройствам и может быть использовано для подъема людей и грузов в жилых и производственных зданиях.
Известен подъемник, содержащий неподвижно закрепленные, параллельные гладкую направляющую и с винтовой нарезкой грузонесущую штанги, грузовую платформу, соединенную с корпусом, содержащим сопряженную с грузонесущей штангой гайку, с возможностью ее вращения от размещенного на корпусе привода и ограничением осевого смещения относительно корпуса. Подъемник содержит укрепленные на корпусе направляющие ролики, контактирующие с направляющей штангой и препятствующие повороту корпуса вокруг оси грузонесущей штанги. При вращении гайки от привода она перемещается вдоль оси грузонесущей штанги, увлекая за собой корпус и грузовую платформу [1].
Недостаток указанного подъемника заключается в том, что его работа связана с трением скольжения и локальным характером износа гайки и грузонесущей штанги. Высокая интенсивность изнашивания, характерная для трения скольжения, и его локализация на геликоидных поверхностях витков приводят к быстрой потере правильной геометрической формы рабочих поверхностей гайки и грузонесущей штанги. Это ускоряет износ и снижает долговечность подъемника.
Наиболее близким аналогом является подъемник, содержащий корпус, по крайней мере, одну полую, круглого сечения грузонесущую штангу, грузовую платформу, соединенную с корпусом, ведущие ролики, прижимающиеся к наружной поверхности упомянутой штанги, закрепленный на корпусе привод вращения ведущих роликов, включающий в себя двигатель и механическую передачу, направляющие ролики, закрепленные на корпусе и грузовой платформе [2].
Недостатком известного подъемника является снижение его долговечности за счет износа ведущих роликов.
Техническим результатом является повышение долговечности подъемника.
Этот технический результат достигается тем, что в подъемнике, содержащем корпус, неподвижно укрепленную полую, круглого сечения грузонесущую штангу, грузовую платформу, соединенную с корпусом, две группы ведущих роликов, смонтированные на корпусе на опорах вращения и прижимающиеся к рабочей поверхности грузонесущей штанги, привод вращения ведущих роликов, укрепленные на грузовой платформе направляющие ролики, при этом рабочей поверхностью грузонесущей штанги является поверхность ее полости, выполненная цилиндрической, привод содержит электродвигатели, вращаемые в противоположные стороны с одинаковой частотой и соединенные своими корпусами с вращаемыми статорами с верхней и нижней втулками, группы ведущих роликов смонтированы на верхней и нижней втулках эксцентрично относительно рабочей поверхности грузонесущей штанги посредством осей, расположенных по нормали к рабочей поверхности этой штанги и проходящих для каждого ведущего ролика через центр площадки контакта вышеуказанной поверхности с этим роликом и с возможностью их ограниченного синхронного поворота относительно упомянутых осей, причем подъемник снабжен приводами поворота ведущих роликов вокруг этих осей для осуществления совместно с упомянутыми электродвигателями движения ведущих роликов разных групп по винтовым траекториям противоположных направлений и направляющими штангами для контактирования с упомянутыми направляющими роликами.
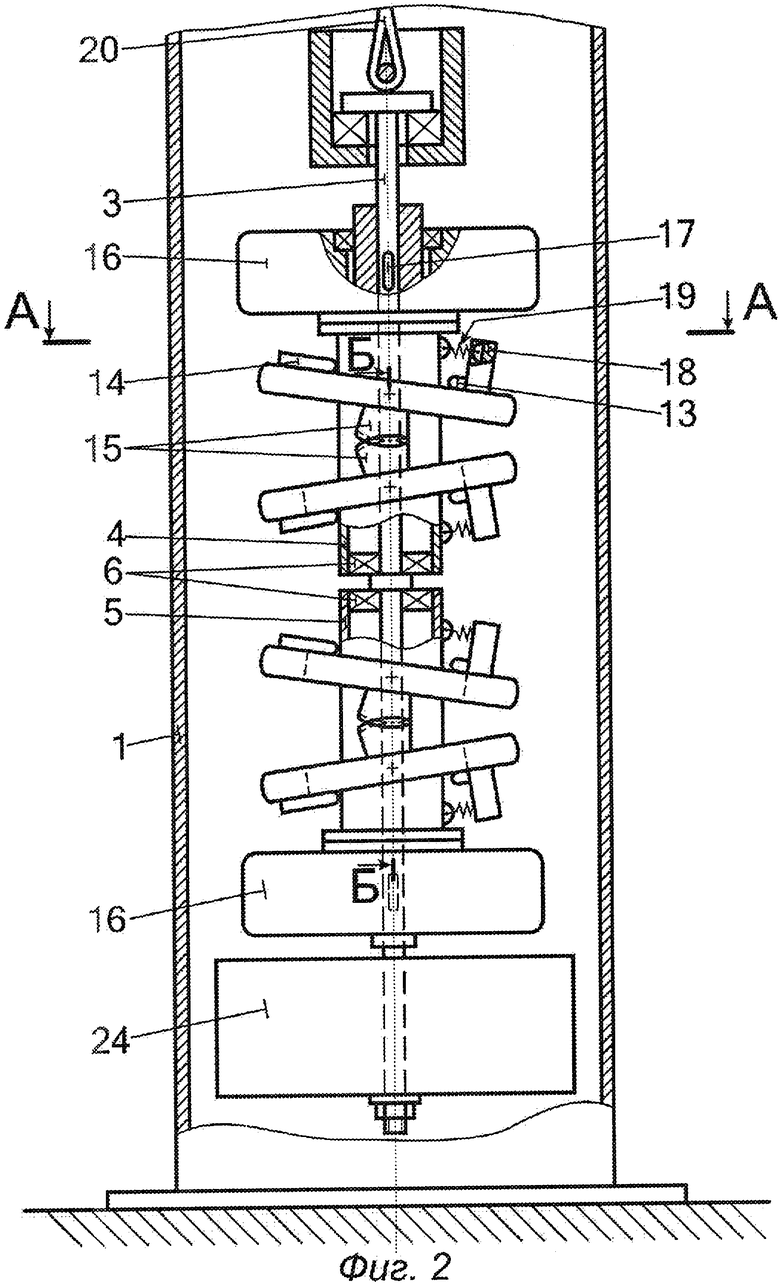
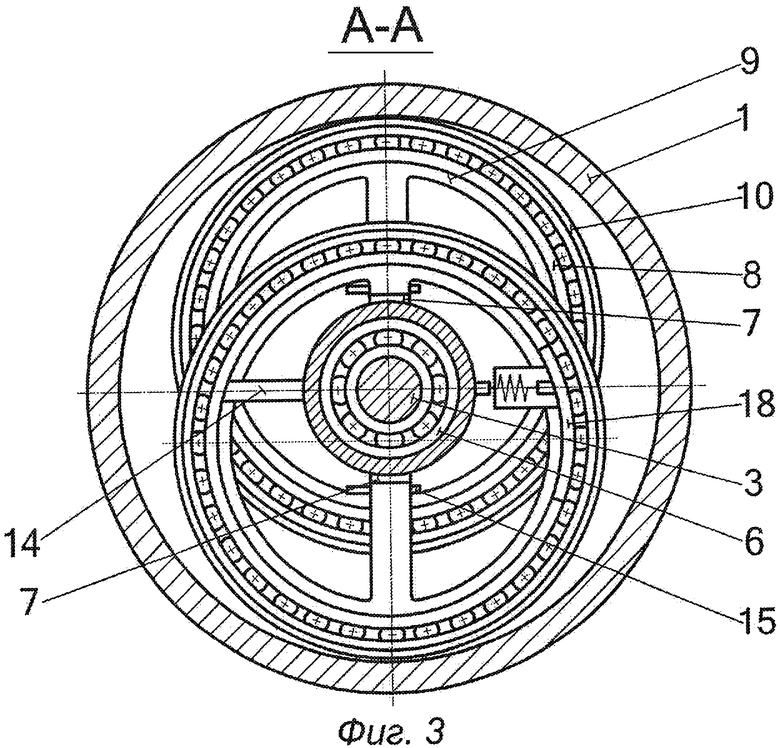
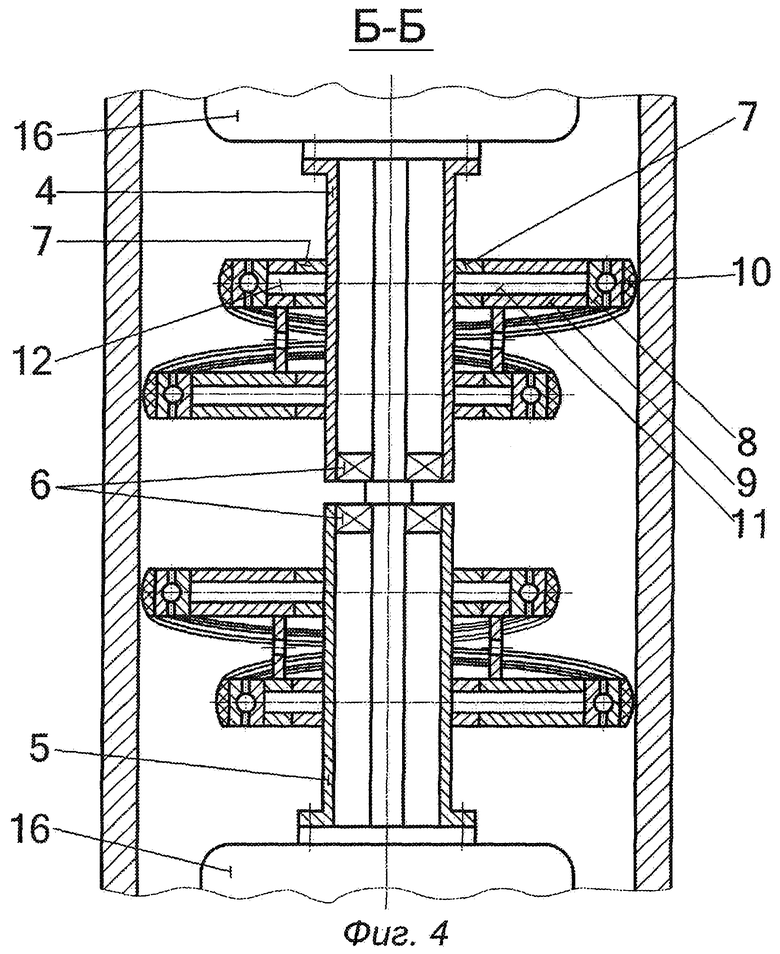
На фиг.1 изображен общий вид подъемника. На фиг.2 - общий вид корпуса подъемника. фиг.3 - разрез А-А на фиг.2. На фиг.4 - разрез Б-Б на фиг.2.
Подъемник содержит параллельно расположенные, неподвижно закрепленные полую, круглого сечения грузонесущую 1 и направляющие 2 штанги, корпус, расположенный в полости грузонесущей штанги, включающий стержень 3 и соосно расположенные верхнюю 4 и нижнюю 5 втулки, опирающиеся посредством радиально-упорных подшипников 6 на стержень. Вышеуказанные втулки имеют возможность вращаться вокруг стержня без смещения вдоль его оси. На верхней и нижней втулках имеются бонки 7, которые расположены парами. Каждая пара бонок имеет соосные диаметрально расположенные отверстия. Ось отверстий в каждой паре бонок перпендикулярна оси стержня корпуса. Корпус содержит две группы ведущих роликов. Верхняя группа ведущих роликов смонтирована на верхней втулке, а нижняя группа - на нижней втулке корпуса. Каждый ведущий ролик состоит из радиально-упорного подшипника качения 8, опорного кольца 9 и обкладки 10. Подшипник качения, служащий опорой вращения ведущему ролику, напрессован внутренним кольцом на опорное кольцо. Обкладка, изготовленная из фрикционного, износостойкого материала, например полиуретана, плотно охватывает наружное кольцо подшипника качения. Опорные кольца ведущих роликов имеют по два направленных к центру прилива. Приливы содержат диаметрально расположенные, соосные отверстия. Отверстия в приливах опорных колец и бонках верхней и нижней втулок имеют одинаковый диаметр. Ведущие ролики смонтированы на верхней и нижней втулках корпуса с помощью осей поворота 11 и 12, расположенных в вышеуказанных отверстиях бонок и опорных колец. Ведущие ролики занимают эксцентричное положение относительно оси стержня корпуса и грузонесущей штанги. Причем величина эксцентриситета у всех ведущих роликов одинакова. Величина и направление эксцентриситета таковы, что два ведущих ролика (наиболее высокорасположенный в верхней группе и низко расположенный в нижней группе) прижимаются к рабочей поверхности грузонесущей штанги по одной ее образующей, а остальные - к диаметрально противоположной образующей. При этом стержень корпуса занимает соосное положение с грузонесущей штангой. Ведущие ролики имеют возможность ограниченного поворота вокруг осей 11 и 12. Поворот ведущих роликов ограничен укрепленными на их опорных кольцах упорами 13 и 14. При контакте упоров 13 со втулками корпуса оси вращения ведущих роликов параллельны оси грузонесущей штанги, а при касании упоров 14 поверхности вышеуказанных втулок оси вращения всех ведущих роликов оказываются повернутыми на одинаковый (по номинальному значению) угол относительно оси грузонесущей штанги. При этом знак указанного угла у ведущих роликов верхней и нижней групп противоположен. Например, при наблюдении со стороны оси стержня корпуса в сторону контакта ведущих роликов верхней группы с грузонесущей штангой знак угла поворота положительный (поворот против часовой стрелки), а у ведущих роликов нижней группы - отрицательный (поворот по часовой стрелке). На опорных кольцах ведущих роликов укреплены сектора 15 с зубьями эвольвентного профиля. Сектора ведущих роликов одной группы находятся в зацеплении. Это обеспечивает синхронность поворота ведущих роликов группы. В корпусе подъемника имеется привод вращения ведущих роликов. На стержне корпуса соосно установлены электродвигатели 16 с полыми роторами. Шпонки 17 и плотная посадка не позволяют роторам электродвигателей проворачиваться и смещаться вдоль оси стержня корпуса. Статор вместе с корпусом электродвигателя имеет возможность вращаться вокруг оси стержня. Корпуса электродвигателей соединены с верхней и нижней втулками. Электродвигатели со втулками играют роль привода вращения ведущих роликов. Они способны передавать вращательное движение смонтированным на втулках ведущим роликам и вызывать их качение по грузонесущей штанге. Привод поворота ведущих роликов центробежного типа. На опорных кольцах ведущих роликов эксцентрично укреплены грузы 18. На вышеуказанных грузах и верхней и нижней втулках имеются проушины, которые служат опорами зацепов пружин 19. Пружины установлены с предварительным растяжением. При контакте упоров 13 во втулки корпуса за счет натяга пружин обеспечивается параллельное положение осей вращения ведущих роликов и оси грузонесущей штанги. Стержень корпуса 3 посредством троса 20 через блоки 21 соединен с грузовой платформой 22. Грузовая платформа имеет направляющие ролики 23, контактирующие с направляющими штангами 2. На нижней части стержня корпуса укреплен противовес 24, уравновешивающий вес грузовой платформы, загруженной половиной максимально допустимого груза. Подъемник снабжен электронной системой управления 25, установленной на грузовой платформе.
Подъемник работает следующим образом. В исходном состоянии за счет предварительного натяга пружин 19 упоры 13 прижимаются к поверхности верхней 4 и нижней 5 втулок корпуса. Оси вращения ведущих роликов параллельны оси грузонесущей штанги 1. Обкладки 10 ведущих роликов прижимаются к поверхности полости грузонесущей штанги. Причем усилие прижатия таково, что сумма сил трения в контакте обкладок всех ведущих роликов с грузонесущей штангой больше веса грузовой платформы с максимально допустимым грузом. За счет этого даже максимально загруженная платформа надежно удерживается на весу и не смещается вниз. Перед началом движения подъемника с помощью системы управления 25 включают питание электродвигателей 16 и плавно, синхронно увеличивают частоту их вращения. Причем направление вращения верхнего и нижнего электродвигателей противоположно. Вместе с корпусами электродвигателей начинают вращаться и соединенные с ними верхняя 4 и нижняя 5 втулки корпуса. Ведущие ролики начинают обкатываться по цилиндрической поверхности полости грузонесущей штанги. В начале траектории их обкатки представляют собой окружности, лежащие в плотностях перпендикулярных оси грузонесущей штанги. При этом корпус и грузовая платформа не смещаются в вертикальном направлении. Поскольку направление вращения верхней и нижней втулок противоположно, то и установленные на них ведущие ролики верхней и нижней групп при своем обкатывающем движении вращаются также в противоположном направлении. При вращении ведущих роликов за счет эксцентрично расположенных на опорных кольцах 9 грузов 18 возникают центробежные силы, направленные радиально по отношению к оси вращения ведущих роликов. Будучи условно приложенными в точках, соответствующих положению центра тяжести грузов, т.е. на некотором расстоянии от осей 11 и 12, центробежные силы стремятся повернуть ведущие ролики вокруг вышеуказанных осей. Этому повороту препятствуют поставленные с натягом пружины 19. При малых частотах вращения электродвигателей и ведущих роликов центробежные силы и создаваемые ими моменты поворота ведущих роликов оказываются меньше соответствующих моментов от усилия предварительного натяга пружин. При этом поворота ведущих роликов не происходит. По-прежнему траектория их обкатки по грузонесущей штанге имеет форму окружности. Корпус не смещается в осевом направлении, остается неподвижной и грузовая платформа. С нарастанием частоты вращения электродвигателей и ведущих роликов растут центробежные силы. Преодолевая момент от натяга пружин, эти силы начинают поворачивать ведущие ролики вокруг осей 11, 12. За счет зацепления секторов 15 поворот ведущих роликов происходит синхронно. Причем в каждый момент обкатывающего движения ведущих роликов по рабочей поверхности грузонесущей штанги и их поворота вокруг вышеуказанных осей за счет одинаковых частоты вращения, формы, размеров и массы грузов 18, натяга и жесткости пружин 19 угол поворота ведущих роликов, принадлежащих разным группам, оказывается одинаковым по номинальному значению. В процессе поворота ведущих роликов траектория их обкатки приобретает вид винтовой линии. Поскольку знаки углов поворота ведущих роликов разных групп противоположны, винтовые траектории их обкатки по грузонесущей штанге имеют противоположное направление хода. Так как угол поворота ведущих роликов верхней группы положительный, они обкатываются по винтовой траектории левого хода. А у ведущих роликов нижней группы и при отрицательном угле их наклона обкатка происходит по винтовой линии правого хода. Одинаковые номинальные значения углов наклона ведущих роликов верхней и нижней групп обеспечивает и одинаковую величину хода винтовой траектории их обкатки. За счет того, что ведущие ролики верхней и нижней групп имеют противоположное направление вращения их движение по винтовым линиям правого и левого хода приводит к перемещению корпуса вдоль оси грузонесущей штанги в одну сторону, вверх или вниз. Это движение через трос 20 и блоки 21 передается грузовой платформе 22. С увеличением частоты вращения электродвигателей 16 растут центробежные силы вращающихся грузов, увеличивается угол наклона осей вращения ведущих роликов и величина хода винтовой траектории их обкатки. Это приводит к увеличению скорости перемещения корпуса вдоль оси грузонесущей штанги. Увеличивается и скорость подъема груза, расположенного на грузовой платформе. Нарастание скорости подъемника прекращается, когда упоры 14 за счет поворота ведущих роликов коснутся верхней и нижней втулок корпуса. В этот момент скорость подъема груза достигает требуемого значения.
При обкатывающем движении ведущих роликов по винтовой линии возникает момент от тангенциальных составляющих сил их трения по грузонесущей штанге. Этот момент стремится повернуть стержень корпуса в сторону, противоположную вращению электродвигателя. Поскольку количество ведущих роликов в верхней и нижней группах, размеры и углы наклона осей вращения, а также сила их прижатия к поверхности грузонесущей штанги одинаковы, моменты, создаваемые ведущими роликами верхней и нижней групп, равны по величине. Так как электродвигатели, приводящие в движение ведущие ролики верхней и нижней групп, имеют противоположное вращение, знаки вышеуказанных моментов, действующих на стержень корпуса, будут различны. За счет взаимной компенсации крутящих моментов стержень корпуса не вращается вокруг своей оси.
Синхронное снижение частоты вращения электродвигателей с помощью системы управления 25 приводит к уменьшению центробежных сил грузов, угла поворота осей вращения ведущих роликов и хода винтовой линии их обкатки по грузонесущей штанге. При этом скорость осевого перемещения корпуса будет уменьшаться. Полная его остановка произойдет в тот момент, когда пружины 19 вернут ведущие ролики в положение, при котором их оси вращения окажутся параллельными оси грузонесущей штанги. При необходимости сменить направление движения грузовой платформы после ее остановки необходимо с помощью системы управления включить реверсивное вращение электродвигателей, приводящих в движение ведущие ролики.
При осуществлении изобретения может быть достигнут технический результат - повышение долговечности подъемника. Так как рабочей поверхностью грузонесущей штанги является цилиндрическая поверхность ее полости, свободная от элементов крепления к опоре, например к стене лифтовой шахты, то открывается возможность использовать для контакта с ведущими роликами всю ее поверхность и избежать нежелательного локального износа.
В связи с тем, что каждый ведущий ролик посредством привода имеет возможность ограниченного поворота вокруг оси, расположенной по нормали к рабочей поверхности грузонесущей штанги и проходящей через центр площадки контакта вышеуказанной поверхности с ведущим роликом, создается возможность ему обкатываться по грузонесущей штанге по винтовой линии. Поскольку корпус содержит две группы ведущих роликов, которые при одинаковой частоте вращения и номинальном значении угла наклона своих осей вращения к оси грузонесущей штанги имеют в разных группах противоположные направления вращения и знаки вышеуказанных углов, создаются условия для осевого перемещения корпуса подъемника. Осевые перемещения корпуса вверх и вниз в процессе работы подъемника приводят к многократному наложению винтовых линий обкатки ведущими роликами рабочей поверхности грузонесущей штанги. Это обеспечивает равномерный ее износ. Сохраняется геометрическая форма рабочих поверхностей как грузонесущей штанги, так и обкладок ведущих роликов. Равномерный износ и сохранение требуемой геометрической формы рабочих поверхностей ответственных деталей обеспечит увеличение долговечности подъемника.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент ФРГ DE 2746268 А1, МПК В 66 В 9/08.
2. DE 19618080, В 66 В 9/02, 13.11.1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2004 |
|
RU2271328C1 |
| ФРИКЦИОННЫЙ ПРИВОД КАРЕТКИ ВЕРТИКАЛЬНОГО ПОДЪЕМНИКА | 2016 |
|
RU2637702C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2462408C1 |
| ФРИКЦИОННЫЙ ПРИВОД КАРЕТКИ ВЕРТИКАЛЬНОГО ПОДЪЕМНИКА | 2017 |
|
RU2666040C2 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2468946C2 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2009 |
|
RU2448893C2 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2791350C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА | 2014 |
|
RU2564943C1 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2009 |
|
RU2453490C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
Изобретение относится к грузоподъемным устройствам. Согласно изобретению рабочей поверхностью грузонесущей штанги подъемника является поверхность ее полости, выполненная цилиндрической. Привод подъемника содержит электродвигатели, вращаемые в противоположные стороны с одинаковой частотой и соединенные своими корпусами с вращаемыми статорами с верхней и нижней втулками. Группы ведущих роликов смонтированы на верхней и нижней втулках эксцентрично относительно рабочей поверхности грузонесущей штанги посредством осей, расположенных по нормали к рабочей поверхности этой штанги и проходящих для каждого ведущего ролика через центр площадки контакта вышеуказанной поверхности с этим роликом и с возможностью их ограниченного синхронного поворота относительно упомянутых осей. Подъемник снабжен приводами поворота ведущих роликов вокруг этих осей для осуществления передачи совместно с упомянутыми электродвигателями движения ведущих роликов разных групп по винтовым траекториям противоположных направлений. Кроме того, подъемник снабжен направляющими штангами для контактирования с упомянутыми направляющими роликами. Изобретение обеспечивает повышение долговечности подъемника. 4 ил.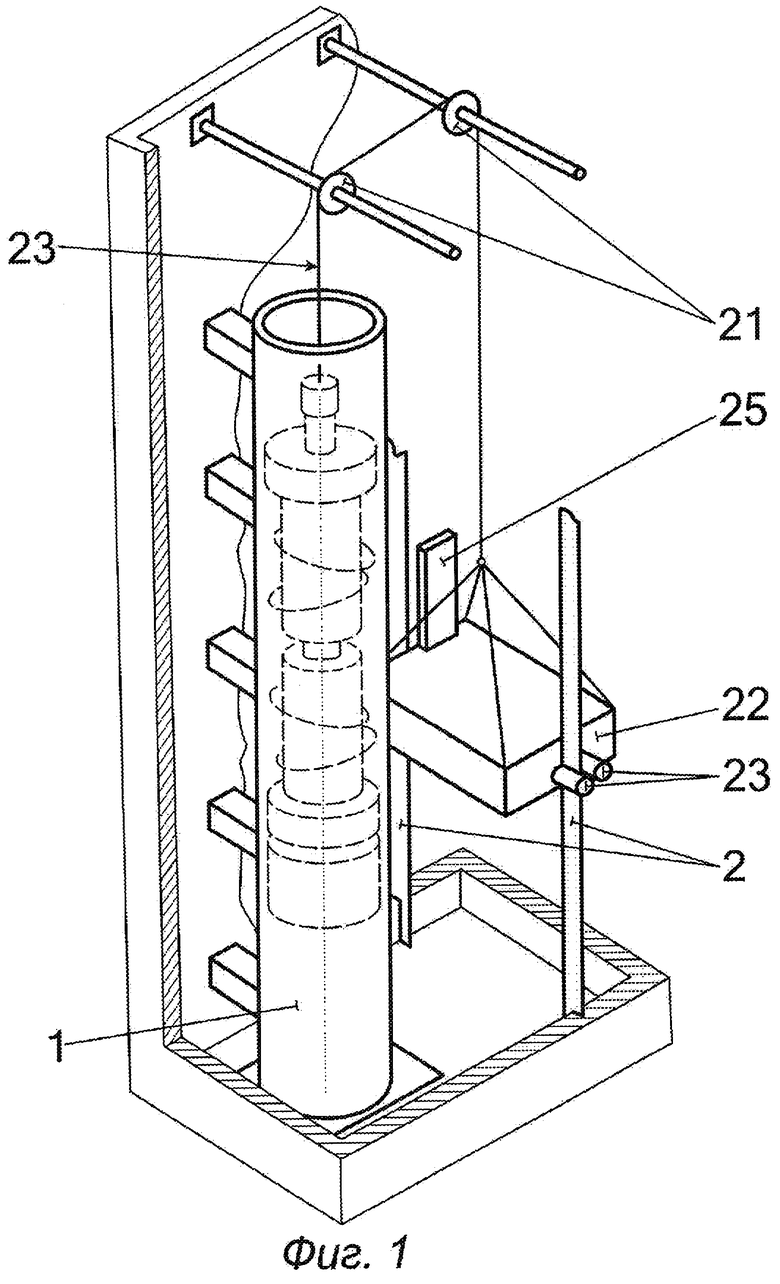
Подъемник, содержащий корпус, неподвижно укрепленную полую, круглого сечения грузонесущую штангу, грузовую платформу, соединенную с корпусом, две группы ведущих роликов, смонтированные на корпусе на опорах вращения и прижимающиеся к рабочей поверхности грузонесущей штанги, привод вращения ведущих роликов, укрепленные на грузовой платформе направляющие ролики, отличающийся тем, что рабочей поверхностью грузонесущей штанги является поверхность ее полости, выполненная цилиндрической, привод содержит электродвигатели, вращаемые в противоположные стороны с одинаковой частотой и соединенные своими корпусами с вращаемыми статорами с верхней и нижней втулками, группы ведущих роликов смонтированы на верхней и нижней втулках эксцентрично относительно рабочей поверхности грузонесущей штанги посредством осей, расположенных по нормали к рабочей поверхности этой штанги и проходящих для каждого ведущего ролика через центр площадки контакта вышеуказанной поверхности с этим роликом и с возможностью их ограниченного синхронного поворота относительно упомянутых осей, причем подъемник снабжен приводами поворота ведущих роликов вокруг этих осей для осуществления совместно с упомянутыми электродвигателями движения ведущих роликов разных групп по винтовым траекториям противоположных направлений и направляющими штангами для контактирования с упомянутыми направляющими роликами.
| DE 19618080 A1, 13.11.1997 | |||
| DE 1295780 A1, 22.05.1969 | |||
| DE 4122855 A1, 20.08.1992 | |||
| Подъемное устройство | 1973 |
|
SU848465A1 |

