Изобретение относится к механизмам грузоподъемных устройств, преимущественно вертикальных подъемников для инвалидов-колясочников.
Из уровня техники известны подъемники, компоновка конструкции которых выполнена по одинаковой схеме: грузовая платформа, соединенная с корпусом подъемника, перемещаемого вверх-вниз от привода по вертикальным направляющим.
Разница между ними заключается в различии конструкции устройств механизма перемещения подъемника.
Так, подъемник по патенту DE №4118134 C1 содержит полую, круглого сечения неподвижную грузонесущую штангу, два цанговых зажима, надетых на грузонесущую штангу, гидропривод цанговых зажимов и систему управления, обеспечивающую поочередное срабатывание цанговых зажимов. Работа зажимов сопровождается их осевым смещением относительно грузонесущей штанги, что и приводит к перемещению вдоль нее корпуса грузовой платформы.
Подъемник по патенту DE №2746268 A1 содержит полую, круглого сечения неподвижную грузонесущую штангу с винтовой нарезкой и гайку, сопряженную с грузонесущей штангой. При вращении гайки от привода она перемещается вдоль оси грузонесущей штанги, увлекая за собой корпус с укрепленной на нем грузовой платформой.
Подъемник по патенту DE №19618080 A1 содержит полую, круглого сечения неподвижную грузонесущую штангу, фрикционные ведущие ролики, прижимаемые с достаточно мощным усилием к наружной поверхности упомянутой штанги, закрепленный на корпусе привод вращения ведущих роликов, перемещающих вдоль грузонесущей штанги грузовую платформу.
Недостаток прототипа заключается в сложности конструкции привода каретки подъемника: обеспечение вращения ведущих роликов от привода через зубчатую передачу и промежуточный элемент - барабан сложной конфигурации, наличие шаровых опор на концах ведущих роликов, отдельная регулировка каждого ролика через индивидуальную пружину.
При такой схеме установки и регулировке ведущих роликов износ пятна контакта роликов с грузонесущей штангой при постоянном воздействии на них усилий от больших перемещаемых масс происходит неравномерно, что в свою очередь вызывает дисбаланс трения скольжения и возникновение вибрации при движении подъемника.
Кроме того, такая компоновка элементов привода каретки в целом приводит к большим размерам подъемника, что затрудняет его встраивание в стандартные габариты шахт лифтов зданий и сооружений.
Задача изобретения - создать простой и надежный фрикционный привод каретки вертикального подъемника, обеспечивающий его длительную эксплуатацию.
Технический результат изобретения заключается в упрощении конструкции заявленного технического решения, уменьшении габаритов, обеспечении равномерного износа трущихся пар, минимизации регулировки и наладки элементов всей конструкции в целом, что в конечном итоге улучшит эксплуатационные свойства подъемника.
Поставленная задача может быть реализована, а ее технический результат может быть достигнут посредством предлагаемого технического решения заявленного изобретения - фрикционного привода каретки вертикального подъемника, включающего проходящую сквозь корпус каретки трубу, вертикально установленную в опорах в нижней и верхней балках подъемника, ролики, взаимодействующие с трубой, наружная поверхность которых изготовлена из фрикционного материала, например, полиуретана, расположенные наклонно под одинаковым углом к оси трубы с возможностью изменения усилия прижатия к последней пропорционально весу груза, транспортируемого на соединенной с корпусом каретки платформе.
Привод включает как минимум два одинаковых диаметрально расположенных вокруг трубы равноплечих коромысла, размещенных внутри корпуса каретки, снабженных осями, зеркально установленными в ребрах коромысел перпендикулярно перекрещивающимися с осью трубы, получающей вращение от собственного привода.
В центральной части одного коромысла выполнены с одной стороны паз, а с противоположной - выступ, взаимодействующие соответственно с выступом и пазом другого коромысла, при этом геометрия конфигурации пазов и выступов идентична друг другу.
При этом привод включает установленные внутри каждого плеча коромысла как минимум восемь роликов, по две пары, одна над другой на осях, жестко закрепленных в ребрах коромысел, с возможностью контакта с трубой и удержания на ее поверхности усилиями растяжения пружин, закрепленных на концах осей коромысел.
При этом центр пятна контакта каждого ролика с трубой находится на нормали, проходящей от середины оси ролика к оси трубы, причем оси верхнего и нижнего роликов каждой пары расположены в одной параллельной с осью трубы плоскости, а линии пересечения этих плоскостей находятся в центральной фронтальной плоскости трубы.
Изменение усилия прижатия роликов к трубе пропорционально весу груза осуществлено посредством серег, шарнирно связывающих корпус каретки с коромыслами и расположенных зеркально под углом к горизонтальной плоскости, не превышающим «угла трения» фрикционной пары «ролик-труба».
Сущность заявленного технического решения фрикционного привода каретки вертикального подъемника поясняется фигурами, где изображено:
- на фиг. 1 - компоновочная схема вертикального подъемника с фрикционным приводом каретки;
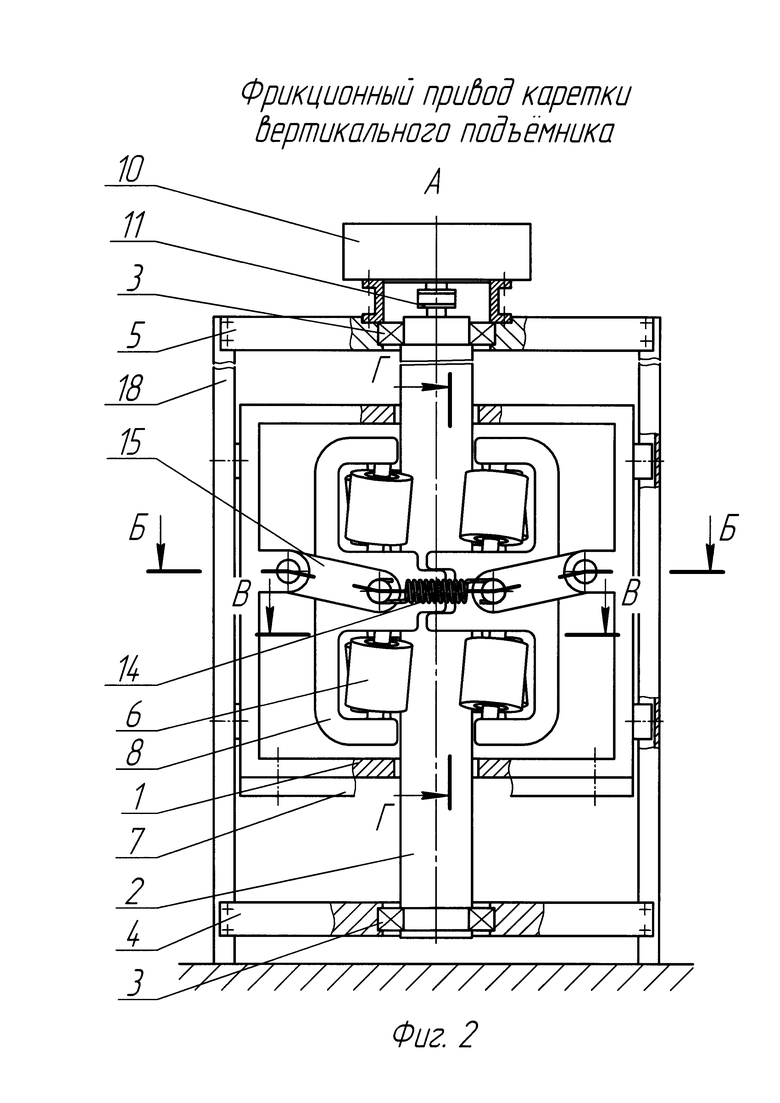
- на фиг. 2 - общий вид А фиг. 1;
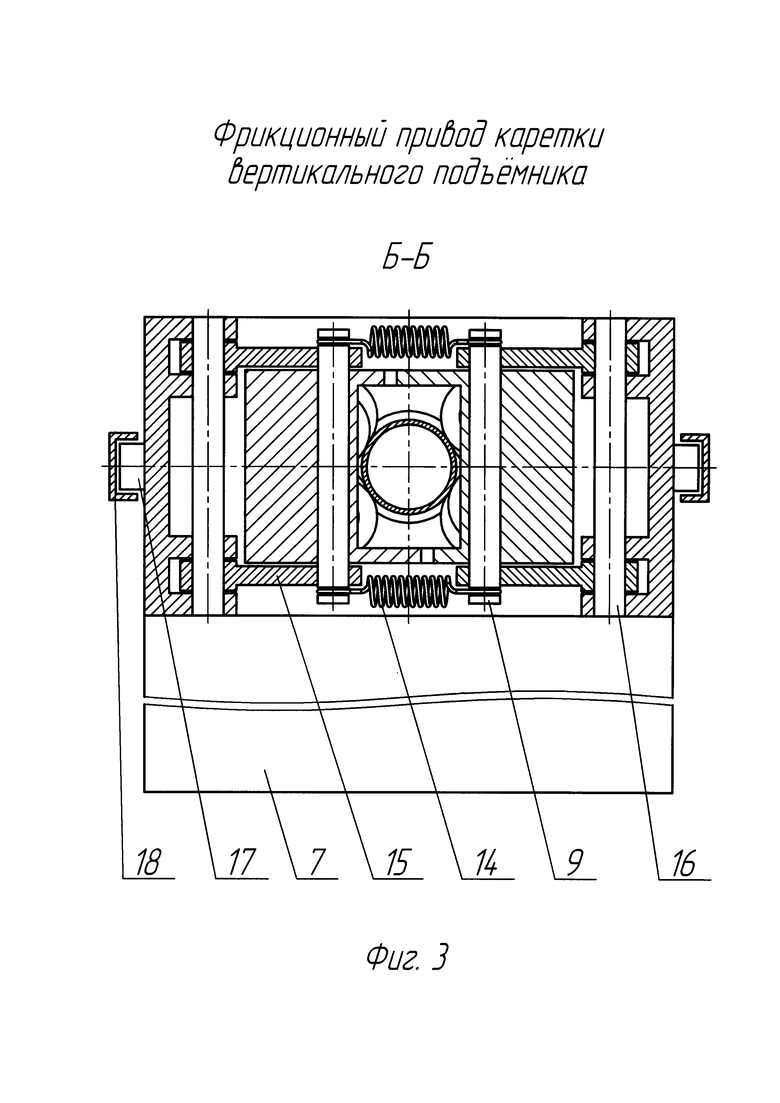
- на фиг. 3 - сечение Б-Б фиг. 2;
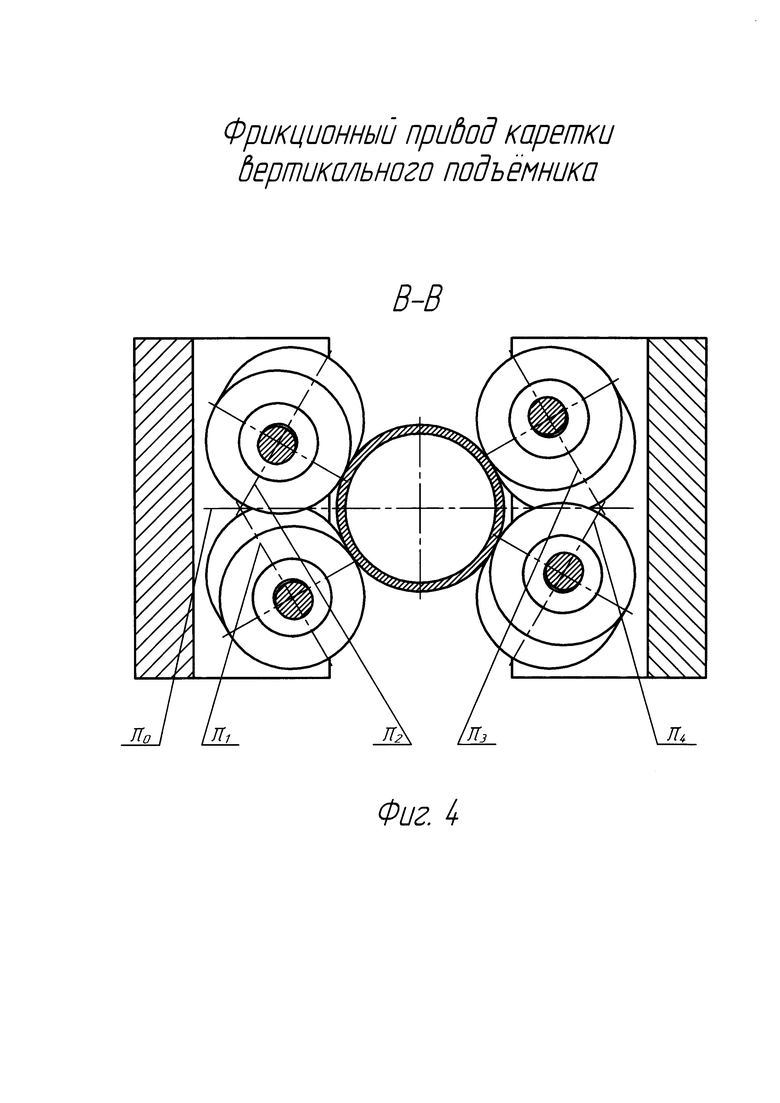
- на фиг. 4 - сечение В-В фиг. 2;
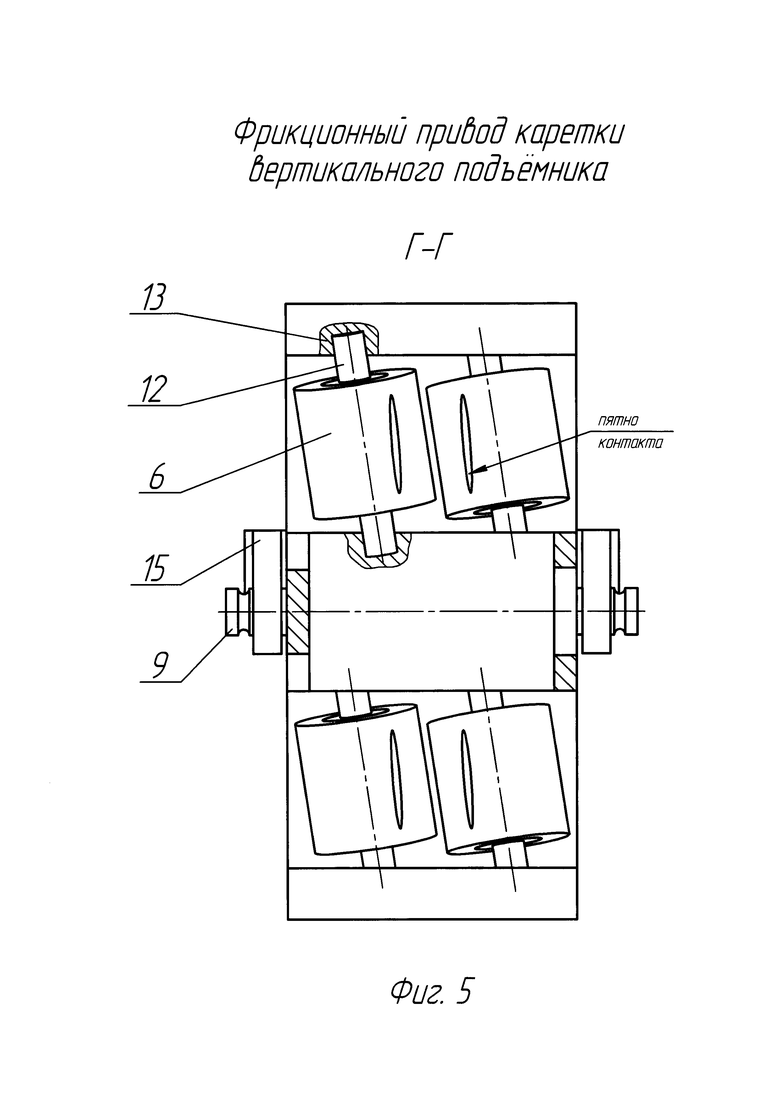
- на фиг. 5 - сечение Г-Г фиг. 2;
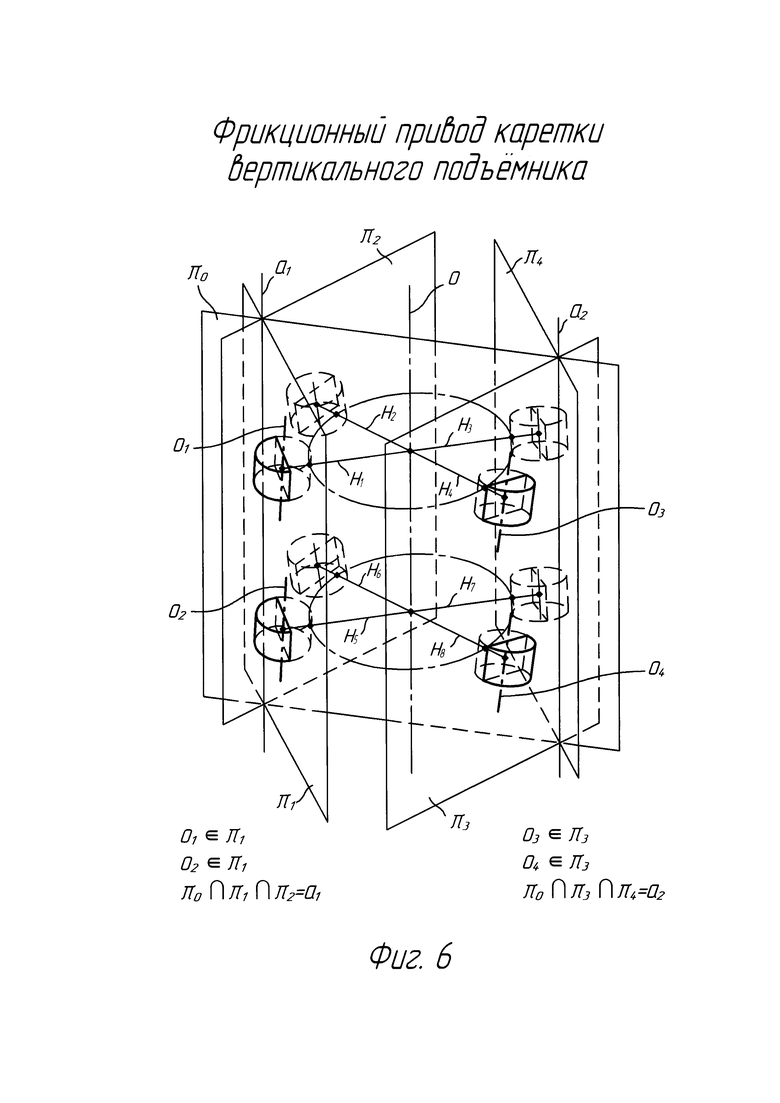
- на фиг. 6 - геометрические условия работоспособности привода;
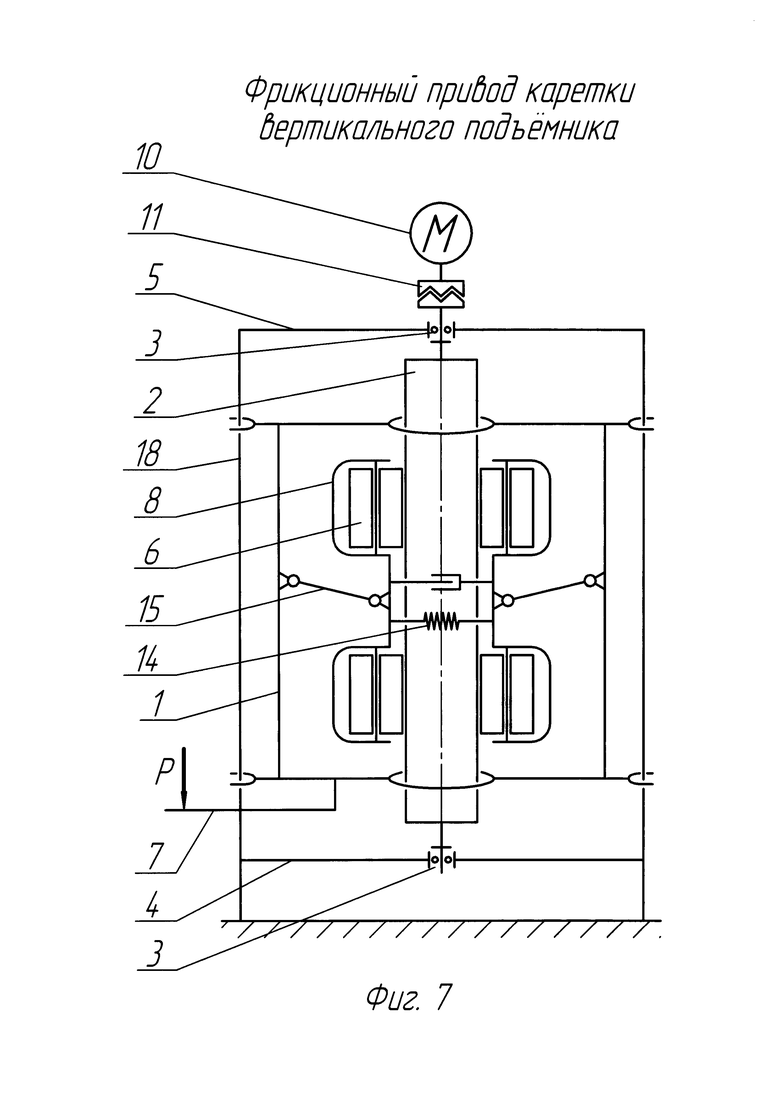
- на фиг. 7 - плоскостная кинематическая схема привода;
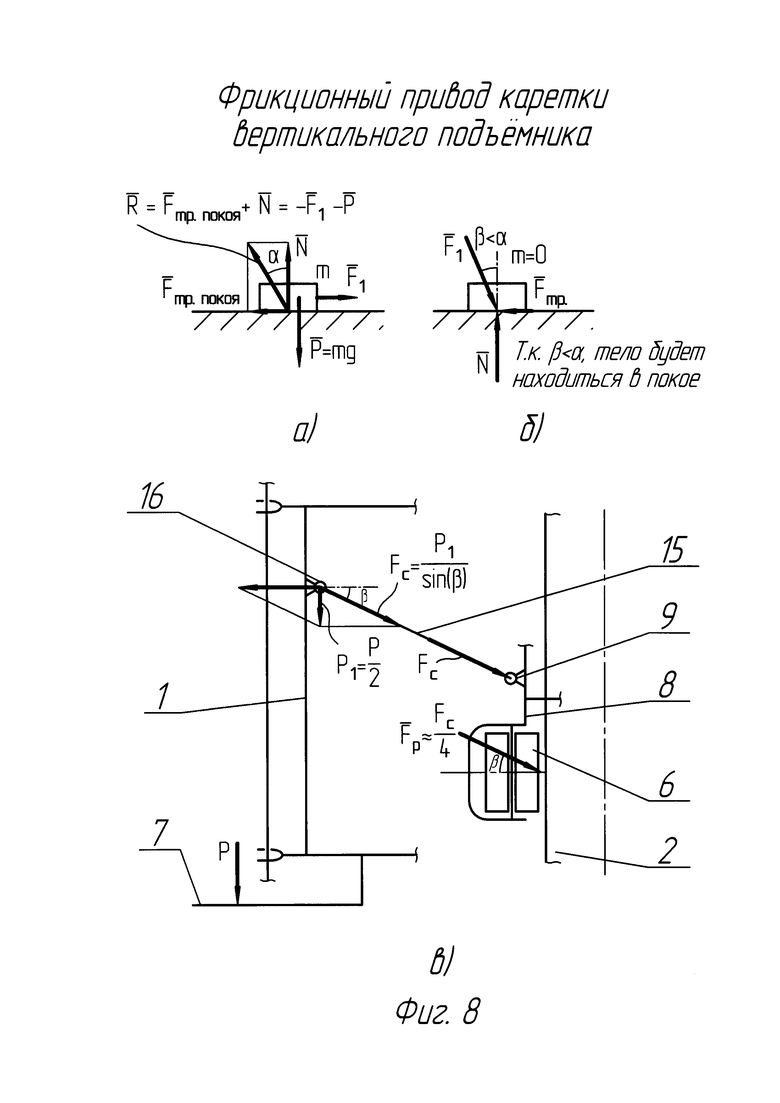
- на фиг. 8 - теоретические основы явления самоторможения и схема передачи веса груза на фрикционные ролики, реализующая это явление.
Фрикционный привод каретки вертикального подъемника включает (фиг. 2, 7) проходящую сквозь корпус 1 каретки трубу 2, вертикально установленную в подшипниковых опорах 3 в нижней 4 и верхней 5 балках подъемника, закрепленных на параллельных трубе 2 направляющих 18, а также ролики 6, взаимодействующие с трубой 2. Наружная поверхность роликов 6 изготовлена из фрикционного материала, например полиуретана. Ролики 6 расположены наклонно под одинаковым углом (фиг. 4, 6) к оси трубы 2 с возможностью изменения усилия прижатия к последней пропорционально весу груза Р (фиг. 7), транспортируемого на соединенной с корпусом 1 каретки платформе 7.
Фрикционный привод (фиг. 2, 3, 5) включает как минимум два одинаковых диаметрально расположенных вокруг трубы 2 равноплечих коромысла 8, размещенных внутри корпуса 1 каретки. Коромысла 8 снабжены осями 9, зеркально установленными в ребрах коромысел перпендикулярно перекрещивающимися с осью трубы 2. Труба 2 получает вращение от собственного привода - мотор-редуктора 10, соединенного с ней через муфту 11.
В центральной части одного коромысла 8 выполнены с одной стороны паз, а с противоположной - выступ (фиг. 2), взаимодействующие соответственно с выступом и пазом другого коромысла, обеспечивающие таким образом симметричность расположения коромысел 8 относительно трубы 2 за счет идентичной геометрии конфигурации пазов и выступов.
Внутри каждого плеча коромысла 8 установлены как минимум (фиг. 5, 6) восемь роликов 6, по две пары одна над другой, на осях 12, жестко закрепленных в ребрах 13 коромысел под одинаковым углом к оси трубы 2. Коромысла 8 с роликами 6 охватывают трубу 2 и прижимаются к ее поверхности усилиями растяжения пружин 14, закрепленных на концах осей 9 коромысел 8 (фиг. 2, 3).
Как известно, при стремлении сдвинуть одно тело (фиг. 8а), воздействующее на опорную поверхность другого тела с усилием Р, относительно последнего силой F1, в месте их соприкосновения возникает нормальная сила "реакции опоры" N=-P и сила трения покоя Fтр. покоя=-F1, при достижении которой некоторого максимального значения тело начинает проскальзывать. Причем полная сила "реакции опоры" R=N+Fтр. покоя тах в этот момент будет направлена под углом α к нормали к поверхности соприкосновения тел (так называемый угол трения). Также известно, что если одно тело воздействует на другое тело со сколь угодно большой силой F1 под углом β меньшим α, то тела будут оставаться неподвижными относительно друг друга (фиг. 8б).
Усилия растяжения пружин 14 выбраны минимально такими, что возникающих в местах контакта роликов 6 с трубой 2 сил трения покоя достаточно для удержания коромысел 8 с роликами 6 на ее поверхности.
Весь остальной вес перемещающихся элементов каретки и размещенного на платформе груза передается фрикционным роликам 6 посредством четырех серег 15, шарнирно связывающих через оси 9 и 16 корпус 1 каретки с коромыслами 8, и расположенных зеркально под углом β к горизонтальной плоскости (фиг. 8,в), не превышающим значения "угла трения" α фрикционной пары «ролик-труба». А так как серьги 15 по сути являются стержнями, передающими усилия вдоль прямой, соединяющей два их шарнира (оси 9 и 16), то и любой вес Р, передающийся роликам 6 от корпуса 1 каретки через серьги 15 и коромысла 8 преобразуется в усилие Fр, действующее под углом β меньшим "угла трения" α, и, следовательно, не вызывающее проскальзывания роликов 6 по поверхности трубы 2.
При этом наибольшая работоспособность фрикционного привода будет достигнута только при условии (фиг. 4, 6), что центр пятна контакта каждого ролика с трубой находится на нормали Н1…Н8, проходящей от середины оси ролика к оси О трубы, причем оси верхнего и нижнего роликов каждой пары расположены в одной параллельной с осью О трубы плоскости π1…π4, а линии пересечения этих плоскостей a1 и a2 находятся в центральной фронтальной плоскости трубы π0. Такая геометрия расположения роликов относительно трубы обеспечивает равномерное распределение нагрузок между ними.
Каретка подъемника с помощью роликов 17 ограничена в движении двумя параллельными трубе 2 направляющими 18 (фиг. 2, 3).
Фрикционный привод каретки вертикального подъемника работает следующим образом. В исходном положении каретка с платформой и грузом удерживаются на поверхности неподвижной трубы 2 роликами 6 за счет сил трения покоя, возникающих в пятнах контактов роликов с поверхностью трубы по описанной выше схеме.
При передаче крутящего момента от мотор-редуктора 10 на трубу 2 последняя начинает вращение и заставляет ролики совершать относительно нее движение по спирали (обкатывание) с одновременным вращением вокруг собственных осей 12. Каретка подъемника начинает перемещение по направляющим 18 вверх или вниз в зависимости от направления вращения трубы.
Заявленное изобретение позволит освоить выпуск новых вертикальных подъемников с более простым и надежным в эксплуатации фрикционным приводом его каретки, обеспечив минимальный износ поверхности приводных роликов, а также простую минимальную регулировку и наладку всей конструкции в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННЫЙ ПРИВОД КАРЕТКИ ВЕРТИКАЛЬНОГО ПОДЪЕМНИКА | 2017 |
|
RU2666040C2 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА | 2014 |
|
RU2564943C1 |
| КАРЕТКА ЛЕСТНИЧНОГО ПОДВЕСНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2791350C1 |
| ПОДЪЕМНИК | 2004 |
|
RU2271328C1 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2468946C2 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2009 |
|
RU2448893C2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2462408C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ НАПРАВЛЯЮЩЕЙ МАГИСТРАЛИ ЛЕСТНИЧНОГО ПОДЪЕМНИКА (ВАРИАНТЫ) | 2022 |
|
RU2796133C1 |
| ПОДЪЕМНИК | 2004 |
|
RU2271329C1 |
| ПОДВЕСНОЙ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2009 |
|
RU2453490C2 |

Изобретение относится к механизмам грузоподъемных устройств, преимущественно вертикальных подъемников для инвалидов-колясочников. Привод включает проходящую сквозь корпус (1) каретки трубу (2), вертикально установленную в опорах (3) в нижней и верхней балках (4, 5) подъемника, ролики (6), взаимодействующие с трубой (2), расположенные радиально и наклонно под одинаковым углом к оси трубы (2) с возможностью изменения усилия прижатия к последней пропорционально весу груза, транспортируемого на соединенной с корпусом каретки платформе. Привод включает как минимум два одинаковых диаметрально расположенных вокруг трубы (2) равноплечих коромысла (8), размещенных внутри корпуса (1) каретки, снабженных осями, зеркально установленными в ребрах коромысел (8) перпендикулярно перекрещивающимися с осью трубы (2). В центральной части одного коромысла выполнены с одной стороны паз, а с противоположной - выступ, взаимодействующие соответственно с выступом и пазом другого коромысла. Внутри каждого плеча коромысла (8) установлены как минимум восемь роликов (6), по две пары, одна над другой, на осях, жестко закрепленных в ребрах коромысел, с возможностью контакта с трубой (2) и удержания на ее поверхности усилиями растяжения пружин (14), закрепленных на концах осей (9) коромысел (8). Изменение усилия прижатия роликов (6) к трубе (2) пропорционально весу груза осуществлено посредством серьг (15), шарнирно связывающих корпус (1) каретки с коромыслами (8) и расположенных зеркально под углом к горизонтальной плоскости. Изобретение обеспечивает создание простого фрикционного привода каретки подъемника, обеспечивающего его длительную эксплуатацию. 8 ил.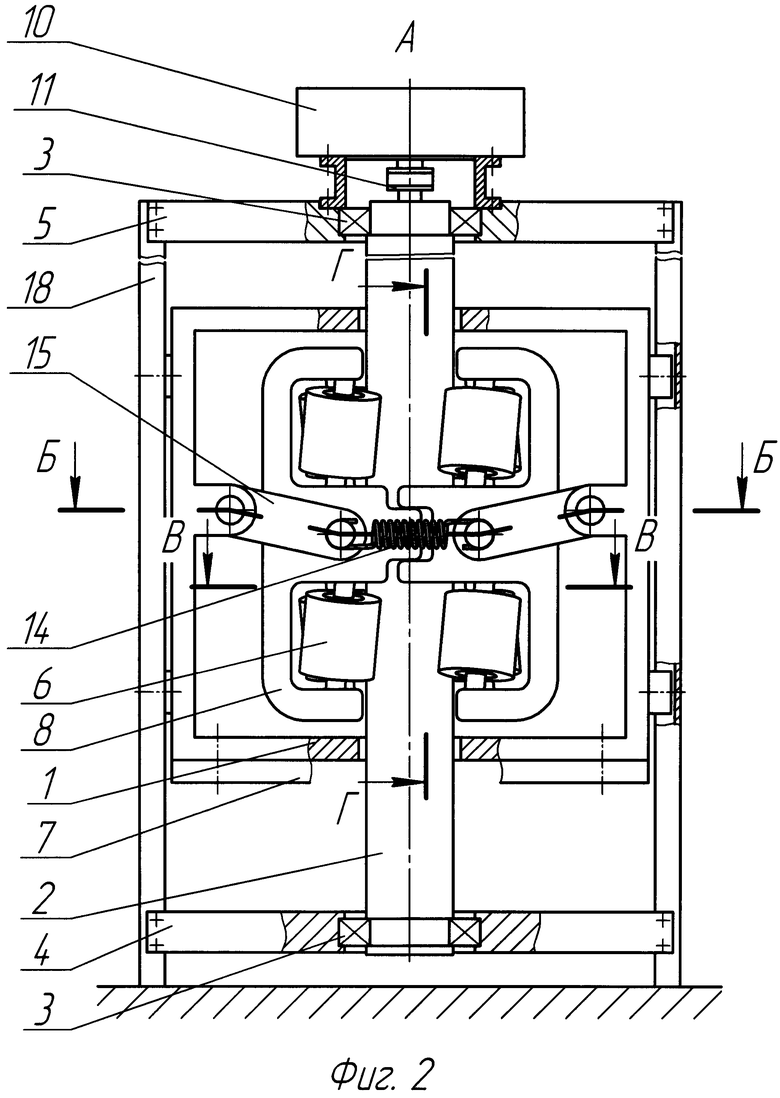
Фрикционный привод каретки вертикального подъемника, включающий проходящую сквозь корпус каретки трубу, вертикально установленную в опорах в нижней и верхней балках подъемника, ролики, взаимодействующие с трубой, наружная поверхность которых изготовлена из фрикционного материала, например полиуретана, расположенные наклонно под одинаковым углом к оси трубы с возможностью изменения усилия прижатия к последней пропорционально весу груза, транспортируемого на соединенной с корпусом каретки платформе, отличающийся тем, что привод включает как минимум два одинаковых диаметрально расположенных вокруг трубы равноплечих коромысла, размещенных внутри корпуса каретки, снабженных осями, зеркально установленными в ребрах коромысел перпендикулярно перекрещивающимися с осью трубы, получающей вращение от собственного привода, причем в центральной части одного коромысла выполнены с одной стороны паз, а с противоположной - выступ, взаимодействующие соответственно с выступом и пазом другого коромысла, при этом геометрия конфигурации пазов и выступов идентична друг другу, при этом привод включает также как минимум восемь роликов, установленных внутри каждого плеча коромысла, по две пары одна над другой, на осях, жестко закрепленных в ребрах коромысел, с возможностью контакта с трубой и удержания на ее поверхности усилиями растяжения пружин, закрепленных на концах осей коромысел, при этом центр пятна контакта каждого ролика с трубой находится на нормали, проходящей от середины оси ролика к оси трубы, причем оси верхнего и нижнего роликов каждой пары расположены в одной параллельной с осью трубы плоскости, а линии пересечения этих плоскостей находятся в центральной фронтальной плоскости трубы, изменение усилия прижатия роликов к трубе пропорционально весу груза осуществлено посредством серег, шарнирно связывающих корпус каретки с коромыслами и расположенных зеркально под углом к горизонтальной плоскости, не превышающим «угла трения» фрикционной пары «ролик-труба».
| ПОДЪЕМНИК | 2004 |
|
RU2271328C1 |
| DE 1295780 B, 22.05.1969 | |||
| EP 1860051 A1, 28.11.2007 | |||
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2005 |
|
RU2317936C2 |

