Изобретение относится к области сканирования формы поверхностей, а именно криволинейных поверхностей, используемых для создания форм в авиастроении, судостроении, автомобилестроении и т.п.
Известен способ, заключающийся в том, что на стекло направляют пучок света и по смещению прошедшего через стекло пучка света определяют толщину стекла, отличающийся тем, что пучок света формируют в виде конической поверхности, дополнительно направляют на стекло второй, аналогичный пучок света соосно с первым, с углом схождения, отличным от первого, образующий с первым сходящийся гомоцентрический пучок света, по диаметрам световых колец, образующихся в плоскости регистрации, расположенной в точке схождения пучков перпендикулярно их оси, определяют толщину и коэффициент преломления, по смещению оси пучков определяют клиновидность стекла, по локальным искажениям регистрируемых колец оценивают отклонения поверхности от плоскости. Заявка на изобретение 98101184/28, 6 G 01 B 21/08 от 09.01.1998. Однако данный способ невозможно использовать для измерения непрозрачных объектов.
Известен способ измерения, заключающийся в том, что световой пучок лазерного излучателя, проходя через светоделительную призму, делится на два луча, один из которых, проходя без отклонений дальше, попадает на грань вращающейся с постоянной угловой скоростью зеркальной призмы и разворачивается в горизонтальной плоскости по экрану юстируемого двухщелевого импульсного фотодатчика горизонтальных перемещений. Второй луч, отраженный под углом 90° по отношению к первому, проходя через поворотные призмы, также направляется на грань зеркальной призмы и разворачивается в вертикальной плоскости по экрану юстируемого двухщелевого импульсного фотодатчика вертикальных перемещений. При прохождении луча через датчики с частотой ω0 формируется периодическая последовательность токовых импульсов. Положение этих импульсов во времени однозначно связано с пространственным положением краевых и щелевых фотодатчиков и расстоянием между ними. Измеряя временные интервалы между импульсами, можно получить информацию о смещении
(УДК 681.518.3.001.24
681.586. Автореферат диссертации на соискание ученой степени
621.397. доктора технических наук "Разработка и исследование средств технического контроля на основе лучевых сканирующих систем". Патент РФ RU 2054626 С1, / МКИ 6 G 01 В 21/00, - №5050230/28). Однако данный способ имеет недостатки, т.к. его использование подразумевает наличие контакта с измеряемой поверхностью, что для некоторых поверхностей и методов обработки не представляется возможным или нежелательно.
Известен способ, заключающийся в том, что на сканируемую поверхность проецируется опорный лазерный луч, отличающийся тем, что отраженный свет собирается объективом с кольцевым оптическим сенсором. Отраженный свет собирается на поверхности в виде окружности, радиус которой увеличивается при увеличении расстояния до сканируемой поверхности. Триангуляционный расчет по усредненному радиусу окружности позволяет определить расстояние до измеряемой точки и в конечном итоге оцифровать сканируемую поверхность (САПР и Графика от 04. 2000 г. "Модельщик 2000 Системы 3D - сканирования II"), принятый за прототип. Однако в описании отсутствует информация, раскрывающая математическую сущность способа, необходимая для понимания процесса сканирования. Также не указано, каким образом можно применить данный способ для сканирования панелей и обшивок.
Целью настоящего изобретения является расширение возможностей способа сканирования, математическое описание процесса, адаптация способа для сканирования длинномерных и крупногабаритных поверхностей. Цель достигается тем, что в известный способ вводится устройство вращения лазера вокруг продольной оси под углом с образованием конусообразной поверхности, вследствие чего датчик образа снимает неотраженный образ луча в виде кольца, а непосредственно кольцо, что повышает точность измерения. Следовательно, предлагаемый способ соответствует критерию "новизна".
Известен способ, в котором используется сечение сканируемой поверхности лазерным лучом, основанный на триангуляции лазерной линии, где на сканируемую поверхность проецируется линия, оптический образ которой снимается под некоторым углом датчиком. Тем самым, высотные изменения поверхности превращаются в изменение формы линии оптического образа (Губанов А.В., "Разработка основ объемного лазерного сканирования для программирования обработки на оборудовании с ЧПУ"; автореферат диссертации на соискание ученой степени кандидата технических наук, кафедра электронного машиностроения Уральского государственного технического университета, г. Екатеринбург), но не указано, как этот способ использовать для сканирования крупногабаритных поверхностей, и он не обладает универсальными свойствами. Следовательно, предлагаемый способ соответствует критерию "существенные отличия" и критерию "изобретательский уровень".
Предлагаемый способ поясняется фигурой 1. На сканируемую поверхность 8 направляется луч 4 лазерного излучателя 2, при вращении которого вокруг оси 5 под углом 6 с угловой скоростью 3 на сканируемой поверхности 8 создается кольцо 7. Полученное кольцо снимает датчик образа 1, расположенный перпендикулярно к нормали поверхности 8, на оси вращения 5 лазерного излучателя 2. Изменение формы поверхности приведет к изменению радиуса кольца в соответствующем квадранте.
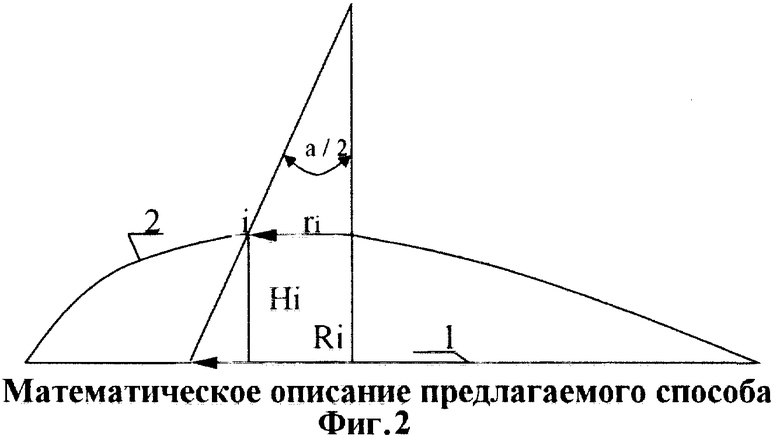
Математическое описание предлагаемого способа представлено на фигуре 2. Определение формы поверхности в i-ой точке основано на определении высоты i-ой точки над базовой плоскостью. Лазерный излучатель 2 (фиг.1), вращаясь под углом α/2, создает на базовой плоскости 1 кольцо с радиусом R. Сканируемая деталь 2 находится на базовой плоскости 1, следовательно, на датчик образа 1 (фиг.1) приходит спроецированное на сканируемую поверхность искаженное кольцо с радиусом в направлении заданного квадранта r. Высота измеряемой точки Hi определяется по формуле
 ,
,
где Hi - высота измеряемой точки; R - радиус кольца на базовой поверхности в 1-ой точке; ri - радиус искаженного кольца на сканируемой поверхности в i-ой точке; α/2 - угол наклона лазерного излучателя 2 (фиг.1).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ И ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1992 |
|
RU2054626C1 |
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |
| Оптико-механическое развертывающее устройство | 1980 |
|
SU957148A1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНО-ФАЗОВОЙ ПРОФИЛОМЕТРИИ И/ИЛИ ПРОФИЛОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2179328C1 |
| ГОЛОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ АСФЕРИЧЕСКИХ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2022 |
|
RU2786688C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ И ОБСЛЕДОВАНИЯ КРУГЛЫХ ОТВЕРСТИЙ В ПРОЗРАЧНЫХ ЖИДКОСТЯХ В СРЕДЕ С ИОНИЗИРУЮЩИМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2757474C2 |
| Способ контроля диаметра микропроволоки и устройство для его осуществления | 1982 |
|
SU1096493A1 |
| Способ контроля коэффициента зеркального отражения локализированных участков поверхности крупногабаритных отражателей | 1983 |
|
SU1167481A1 |
| Способ измерения поля градиента показателя преломления | 1988 |
|
SU1636736A1 |
| Способ для контроля геометрических размеров протяженных объектов и устройство для его осуществления | 1981 |
|
SU1017918A1 |
Способ сканирования формы криволинейных поверхностей заключается в том, что на сканируемую поверхность направляют пучок света от лазерного излучателя. Производят образование конической световой поверхности вращением лазерного излучателя для создания на сканируемой поверхности образа в виде кольца, а форму поверхности определяют перемещением кольца по сканируемой поверхности с интерполяцией высот точек, которые определяют по заявляемому соотношению. Технический результат - сканирование длинномерных и крупногабаритных поверхностей. 2 ил.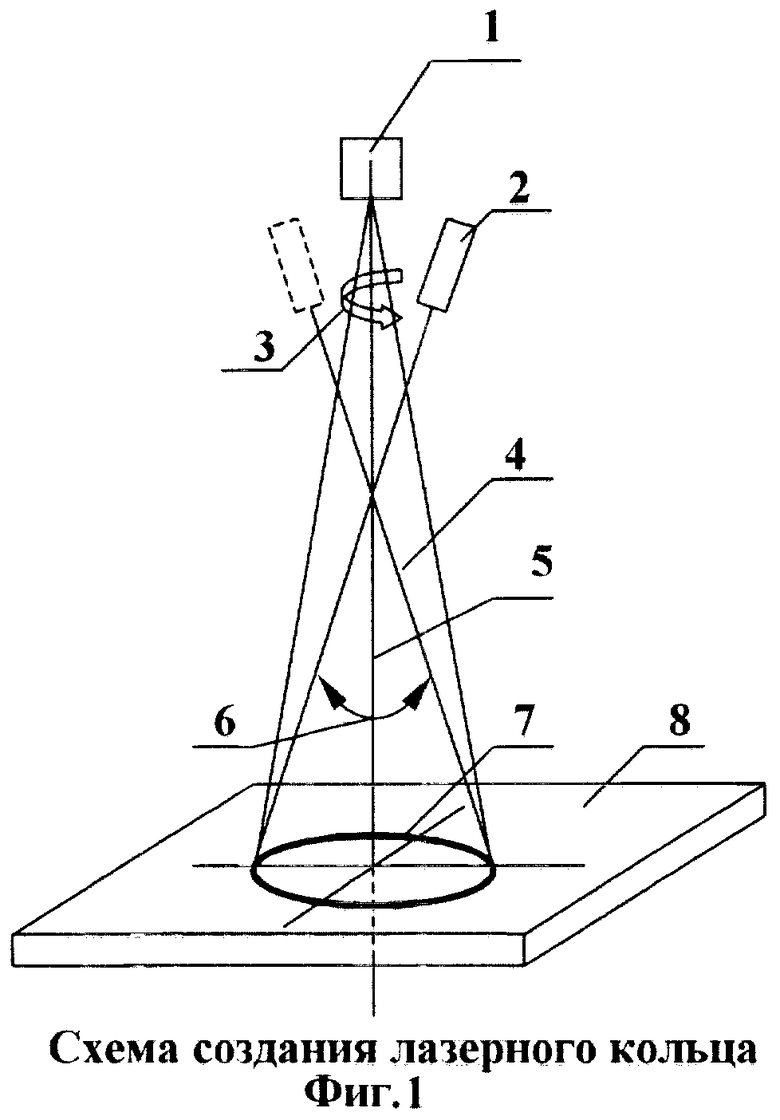
Способ сканирования формы криволинейных поверхностей, заключающийся в том, что на сканируемую поверхность направляют пучок света от лазерного излучателя, отличающийся тем, что, с целью расширения возможностей известного способа, производят образование конической световой поверхности вращением лазерного излучателя для создания на сканируемой поверхности образа в виде кольца, а форму поверхности определяют перемещением кольца по сканируемой поверхности с интерполяцией высот i-х точек, которые определяют по соотношению
где Нi - высота измеряемой точки;
R - радиус кольца на базовой поверхности в i-й точке;
ri - радиус искаженного кольца на сканируемой поверхности в i-й точке;
α/2 - угол наклона лазерного излучателя.
| ОПТИЧЕСКИЙ СКАНИРУЮЩИЙ БЛОК | 1986 |
|
RU2037860C1 |

