Предлагаемое изобретение относится к области геофизических исследований скважин и может быть использовано для построения устройств определения глубины спуска скважинного прибора при проведении каротажных исследований в нефтяных и газовых скважинах.
Известен способ определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах [1], включающий предварительное разбиение грузонесущего каротажного кабеля на одинаковые отрезки и обозначение упомянутых отрезков магнитными метками, путем нанесения на броню грузонесущего каротажного кабеля магнитных меток, запоминание сигнала, соответствующего длине отрезка ΔL, закрепление на конце грузонесущего каротажного кабеля скважинного прибора на расстоянии lб от границы первого отрезка, запоминание сигнала, соответствующего расстоянию Lб, спуск скважинного прибора в скважину или его подъем, обнаружение магнитных меток на движущемся грузонесущем каротажном кабеле путем их считывания считывающим устройством, регистрацию местоположения меток на записи каротажной кривой при обнаружении магнитных меток на грузонесущем каротажном кабеле, определение количества обнаруженных магнитных меток n и расчет глубины спуска скважинного прибора Lпр по формуле

Наиболее близким к заявляемому устройству (прототипом) является устройство определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах [2], состоящее из последовательно соединенных считывающего устройства, счетчика и вычислителя, а также из блока памяти, выход блока памяти подключен к второму входу вычислителя, выход последнего служит первым выходом устройства определения глубины, второй выход устройства определения глубины соединен с третьим входом вычислителя и подключен к выходу считывающего устройства.
Работа известного способа определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах [1] заключается в последовательной реализации устройством [2] следующих операций.
1. Предварительно разбивают грузонесущий каротажный кабель на одинаковые мерные отрезки ΔL и обозначают упомянутые мерные отрезки магнитными метками, запоминают сигнал, соответствующий длине мерного отрезка ΔL.
В соответствии с [1] длина мерных отрезков AL принимается равной 10, 20 или 40 м, хотя известный способ не критичен к выбору длины мерных отрезков ΔL и сохраняет свою работоспособность при любой известной длине мерных отрезков ΔL.
Обозначение упомянутых мерных отрезков магнитными метками осуществляется путем нанесения на броню каротажного кабеля на границах мерных отрезков магнитных меток в виде одиночных [1] или составных магнитных меток [2].
Запоминание сигнала, соответствующего длине мерного отрезка ΔL, осуществляется в блоке памяти.
Разбиение грузонесущего каротажного кабеля на мерные отрезки ΔL и обозначение упомянутых мерных отрезков магнитными метками может осуществляться на базе геофизического предприятия (стационарная разметка) или на скважине [1].
Закрепляют на конце грузонесущего каротажного кабеля скважинный прибор на расстоянии Lб от границы первого отрезка, запоминают сигнал, соответствующий расстоянию Lб.
Запоминание сигнала, соответствующего расстоянию αб, осуществляется в блоке памяти.
3. Спускают и поднимают скважинный прибор на грузонесущем каротажном кабеле в скважине. Обнаруживают магнитные метки на движущемся грузонесущем каротажном кабеле путем их считывания считывающим устройством.
4. Регистрируют местоположение меток на записи каротажной кривой при обнаружении магнитных меток на броне грузонесущего каротажного кабеля, определяют количество обнаруженных магнитных меток n и рассчитывают глубину спуска скважинного прибора Lпр по формуле (1). При этом в качестве меры глубины спуска скважинного прибора принимают фактически длину части грузонесущего каротажного кабеля с закрепленным на его конце скважинньм прибором, находящейся в скважине.
Количество обнаруженных считывающим устройством магнитных меток n подсчитывается с помощью счетчика. По каждой обнаруженной считывающим устройством магнитной метке на второй выход устройства определения глубины спуска скважинного прибора из считывающего устройства выдается сигнал-признак обнаружения магнитной метки, по которому на записи каротажной кривой регистрируется местоположение этой метки. Одновременно по сигналу-признаку обнаружения магнитной метки в вычислителе осуществляется расчет глубины спуска скважинного прибора Lпр по формуле (1); полученное значение Lпр выдается на первый выход устройства определения глубины спуска скважинного прибора.
Расчет глубины спуска скважинного прибора Lпр в вычислителе осуществляется использованием количества обнаруженных магнитных меток n и величин упомянутых ΔL, Lб, поступающих в вычислитель из счетчика и блока памяти, соответственно.
Недостатком известных способа [1] и устройства [2] являются ограниченные функциональные возможности, связанные с недостаточной точностью определения глубины спуска скважинного прибора L и недостаточной точностью регистрации на записи каротажной кривой границ упомянутых отрезков ΔL.
Указанный недостаток вызывается, во-первых, удлинением кабеля вследствие его деформации под действием силы веса скважинного прибора и части грузонесущего каротажного кабеля, находящейся в скважине, а также под действием суммарных сил, возникающих при движении скважинного прибора в скважине, заполненной промывочной жидкостью, во-вторых, недостаточной помехозащищенностью считывания магнитных меток.
В известном способе определения глубины спуска скважинного прибора для компенсации удлинения кабеля по указанным выше причинам предварительное разбиение грузонесущего каротажного кабеля на одинаковые мерные отрезки ΔL и обозначение упомянутых мерных отрезков магнитными метками осуществляют, имитируя "натяжение кабеля на устье скважины" [1, с.114]. При этом силу натяжения кабеля выбирают исходя из некоторых средних воздействий, приводящих к удлинению кабеля, что не позволяет учесть в полной мере удлинение кабеля в условиях применения конкретных скважинных приборов в конкретной скважине, заполненной промывочной жидкостью с конкретными параметрами.
Недостаточная помехозащищенность считывания магнитных меток в известном способе определения глубины спуска скважинного прибора [1] связана с тем, что грузонесущий каротажный кабель с нанесенными на его броню магнитными метками спускается в скважину, где под действием повышенной температуры происходит размагничивание магнитных меток [3]. Указанный эффект размагничивания приводит к эквивалентному снижению энергии Еm сигналов считываемых магнитных меток, к снижению отношения сигнал/шум h2 при считывании магнитных меток, к снижению помехозащищенности обнаружения сигналов магнитных меток и, как следствие, к увеличению вероятности пропуска и регистрации ложных магнитных меток, а также к увеличению погрешности регистрации на записи каротажной кривой местоположения магнитных меток.
Целью заявляемого способа является расширение его функциональных возможностей путем повышения точности определения глубины спуска скважинного прибора Lпр и точности регистрации на записи каротажной кривой местоположения магнитных меток.
Поставленная цель достигается тем, что в способе определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, включающем предварительное закрепление на конце грузонесущего каротажного кабеля скважинного прибора на расстоянии Lб, от предварительно нанесенной на броню кабеля базовой магнитной метки, запоминание сигнала, соответствующего расстоянию Lб, спуск скважинного прибора в скважину или его подъем, обнаружение магнитных меток на движущемся грузонесущем каротажном кабеле путем их считывания считывающим устройством, регистрацию местоположения метки на записи каротажной кривой и расчет глубины спуска скважинного прибора Lпр по факту обнаружения магнитной метки на грузонесущем каротажном кабеле, определяют направление движения кабеля V, размещают вблизи устья скважины вдоль движущегося грузонесущего каротажного кабеля последовательно, в направлении его движения ряд, состоящий из устройства размагничивания (УР), устройства нанесения магнитных меток (УНМ) и считывающего устройства (УС), отстоящего от УНМ вдоль кабеля на фиксированное расстояние ΔL, запоминают сигнал, соответствующий расстоянию ΔL, указанный ряд из УР, УНМ и УС устанавливают таким образом, чтобы в первоначальный момент базовая магнитная метка находилась на интервале между устройством размагничивания и считывающим устройством, фиксируют расстояние L0 между УС и точкой отсчета глубины спуска скважинного прибора, запоминают сигнал, соответствующий расстоянию L0, осуществляют размагничивание брони грузонесущего каротажного кабеля, проходящего у УР, по факту обнаружения считывающим устройством на броне кабеля магнитной метки принимают в качестве глубины спуска скважинного прибора Lпр разность значений упомянутых расстояния Lб от нанесенной на броню кабеля базовой магнитной метки до скважинного прибора и расстояния L0 между УС и точкой отсчета глубины, наносят с помощью УНМ на броню кабеля новую магнитную метку, которую принимают за базовую магнитную метку, принимают в качестве нового значения расстояния Lб от базовой магнитной метки до скважинного прибора величину, определенную с использованием рассчитанной глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, информации о направлении движения грузонесущего каротажного кабеля V, запоминают сигнал, соответствующий новому значению расстояния Lб, используют новую базовую магнитную метку и новое значение расстояния Lб для последующего определения глубины спуска скважинного прибора Lпр.
При этом в устройстве определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, состоящем из считывающего устройства (УС), расположенного у движущегося грузонесущего каротажного кабеля и отстоящего от точки отсчета глубины вдоль кабеля на фиксированное расстояние L0, а также из последовательно соединенных блока памяти и вычислителя, выход которого служит первым выходом устройства определения глубины спуска скважинного прибора, введены блок определения направления движения грузонесущего каротажного кабеля (БОН), последовательно размещенные в линию, проходящую через УС и ориентированную вдоль грузонесущего каротажного кабеля, первое устройство размагничивания (УР), первое устройство нанесения магнитных меток (УНМ), второе устройство нанесения магнитных меток (УНМ), второе устройство размагничивания (УР), причем упомянутое УС расположено между первым УНМ и вторым УНМ на фиксированном расстоянии ΔL от каждого из устройств нанесения магнитных меток, также введены первый и второй коммутаторы, логическая схема "ИЛИ", выход которой служит вторым выходом устройства определения глубины спуска скважинного прибора, причем выход БОН подключен к соединенным вместе управляющим входам первого и второго УР, к управляющим входам первого и второго коммутаторов, к второму входу вычислителя, выход УС подключен к соединенным вместе информационным входам первого, второго коммутаторов и третьему входу вычислителя, выход первого коммутатора подключен к соединенным вместе управляющему входу первого УНМ и первому входу логической схемы "ИЛИ", выход второго коммутатора подключен к соединенным вместе управляющему входу второго УНМ и второму входу логической схемы "ИЛИ", второй выход вычислителя соединен с входом блока памяти.
Заявляемое изобретение поясняется примером конкретного выполнения устройства определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, представленным на фиг.1.
Устройство определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах содержит считывающее устройство 1, блок памяти 2, вычислитель 3, выход которого служит первым выходом устройства определения глубины спуска скважинного прибора 4, блок определения направления движения грузонесущего каротажного кабеля 5, первое устройство размагничивания 6, первое устройство нанесения магнитных меток 7, второе устройство нанесения магнитных меток 8, второе устройство размагничивания 9, первый коммутатор 10, второй коммутатор 11, логическая схема "ИЛИ" 12, выход которой подключен ко второму выходу устройства определения глубины спуска скважинного прибора 13.
Работа заявляемых способа и устройства заключается в последовательной реализации следующих операций.
1. Предварительно закрепляют на конце грузонесущего каротажного кабеля скважинный прибор на расстоянии Lб от предварительно нанесенной на броню кабеля базовой магнитной метки, запоминают сигнал, соответствующий расстоянию Lб.
Порядок выполнения операций "закрепление на конце грузонесущего каротажного кабеля скважинного прибора" и "нанесение на броню кабеля базовой магнитной метки" для заявляемого способа не является определяющим. Важно, чтобы базовая магнитная метка была нанесена на броню грузонесущего каротажного кабеля до начала процесса определения глубины спуска и чтобы была определена длина отрезка Lб между закрепленным на конце грузонесущего каротажного кабеля скважинным прибором и нанесенной на броню кабеля базовой магнитной меткой.
Наличие на броне кабеля базовой магнитной метки, как будет показано ниже, является необходимым условием для запуска процесса определения глубины спуска скважинного прибора в заявляемом способе.
Сигнал, соответствующий значению расстояния Lб, хранится в блоке памяти 2.
В качестве магнитных меток могут применяться одиночные [1] или составные магнитные метки [2].
2. Спускают или поднимают скважинный прибор в скважине.
3. Определяют направление движения кабеля V, размещают вблизи устья скважины вдоль движущегося грузонесущего каротажного кабеля последовательно, в направлении его движения ряд, состоящий из устройства размагничивания (УР), устройства нанесения магнитных меток (УНМ) и считывающего устройства (УС), отстоящего от УНМ вдоль кабеля на фиксированное расстояние ΔL, запоминают сигнал, соответствующий расстоянию ΔL.
Указанное фиксированное расстояние ΔL служит мерной базой и является минимальной градацией, с которой в заявляемом способе определяется глубина. Сигнал, соответствующий значению фиксированного расстояния ΔL, хранится в блоке памяти 2.
Определение направления движения грузонесущего каротажного кабеля осуществляется с помощью БОН 5. Для определенности положим, что на выходе БОН 5 формируется сигнал V=1, если осуществляется спуск скважинного прибора (кабель движется вниз, в скважину); и на выходе БОН 5 формируется сигнал V=-1, если осуществляется подъем скважинного прибора (кабель движется вверх, из скважины).
При движении кабеля вниз для определения глубины используется ряд из первого УР 6, первого УНМ 7 и устройства считывания 1. При движении кабеля вверх для определения глубины используется ряд из второго УР 9, второго УНМ 8 и устройства считывания 1. Выбор ряда из устройства размагничивания, устройства нанесения магнитных меток, устройства считывания осуществляется выходным сигналом БОН 5, поступающим на управляющие входы первого 6 и второго 9 устройств размагничивания, на управляющие входы первого 10 и второго 11 коммутаторов.
4. Ряд из УР, УНМ и УС устанавливают таким образом, чтобы в первоначальный момент базовая магнитная метка находилась на интервале между устройством размагничивания и считывающим устройством. Фиксируют расстояние L0 между УС и точкой отсчета глубины спуска скважинного прибора, запоминают сигнал, соответствующий расстоянию L0, осуществляют размагничивание брони грузонесущего каротажного кабеля, проходящего у УР.
Необходимость выполнения требования "Ряд из УР, УНМ и УС устанавливают таким образом, чтобы в первоначальный момент базовая магнитная метка находилась на интервале между устройством размагничивания и считывающим устройством" продиктовано тем, что, с одной стороны, базовая метка не должна быть стерта устройством размагничивания, которое осуществляет размагничивание брони кабеля, проходящего у УР, а с другой стороны, после установки ряда из УР, УНМ и УС при движении кабеля базовая магнитная метка должна пройти мимо считывающего устройства, что является необходимым условием для ее обнаружения и запуска процесса определения глубины.
Сигнал, соответствующий расстоянию L0 между УС 1 и точкой отсчета глубины спуска скважинного прибора, хранится в блоке памяти 2.
5. По факту обнаружения считывающим устройством на броне кабеля магнитной метки осуществляют регистрацию местоположения метки на записи каротажной кривой и рассчитывают глубину спуска скважинного прибора Lпр, соответствующую разности упомянутых расстояния Lб от предварительно нанесенной на броню кабеля базовой магнитной метки до скважинного прибора расстояния L0 между УС и точкой отсчета глубины, наносят с помощью УНМ на броню кабеля новую магнитную метку, которую принимают за базовую магнитную метку, принимают в качестве нового значения расстояния Lб от базовой магнитной метки до скважинного прибора величину, определенную с использованием рассчитанной глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, информации о направлении движения грузонесущего каротажного кабеля V, запоминают сигнал, соответствующий новому значению расстояния Lб от новой базовой магнитной метки до скважинного прибора.
Операции, указанные в п.5, выполняются по факту обнаружения магнитной метки считывающим устройством 1. На выходе УС 1 формируется сигнал-признак обнаружения магнитной метки. Если по факту обнаружения магнитной метки происходил спуск скважинного прибора, то сигнал-признак обнаружения магнитной метки с выхода УС 1 через первый коммутатор 10 воздействует на управляющий вход УНМ 7 и на первый вход логической схемы "ИЛИ" 12. С помощью УНМ 7 осуществляется нанесение магнитной метки на броню грузонесущего каротажного кабеля. Если по факту обнаружения магнитной метки происходил подъем скважинного прибора, то сигнал-признак обнаружения магнитной метки с выхода УС 1 через второй коммутатор 11 воздействует на управляющий вход УНМ 8 и на второй вход логической схемы "ИЛИ" 12. Нанесение магнитной метки на броню грузонесущего каротажного кабеля осуществляется УНМ 8.
Следует отметить, что в процессе измерения перед нанесением магнитной метки на броню кабеля осуществляется непрерывное размагничивание брони, что ослабляет воздействие помехи, вызванной остаточной намагниченностью брони кабеля, на сигнал считываемой магнитной метки и повышает помехозащищенность ее обнаружения. При спуске скважинного прибора размагничивание брони кабеля осуществляется устройством размагничивания 6, а при подъеме - устройством размагничивания 9. Включение соответствующего УР осуществляется выходным сигналом БОН 5.
С выхода логической схемы "ИЛИ" 12 признак обнаружения магнитной метки выдается на второй выход 13 устройства определения глубины спуска скважинного прибора для регистрации местоположения магнитной метки на каротажной кривой. Одновременно по выходному сигналу УС 1, поступающему на третий вход вычислителя 3, осуществляется расчет глубины спуска скважинного прибора Lпр с использованием значений упомянутых длины отрезка Lб между закрепленным на конце грузонесущего каротажного кабеля скважинным прибором и нанесенной на броню кабеля базовой магнитной меткой, расстояния L0 между УС и точкой отсчета глубины по формуле

Значения Lб и L0 поступают из блока памяти 2 на первый вход вычислителя 3. Рассчитанное в вычислителе 3 значение глубины спуска скважинного прибора Lпр с его первого выхода выдается на первый выход 4 устройства определения глубины спуска скважинного прибора
Затем обнаруженную магнитную метку принимают за базовую и определяют расстояние Lб от новой базовой магнитной метки до скважинного прибора. Данная операция выполняется в вычислителе 3 с использованием рассчитанной глубины спуска скважинного прибора Lпр значения расстояния L0 между УС 1 и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, информации о направлении движения грузонесущего каротажного кабеля V

Указанные значения Lб, ΔL и L0 поступают из блока памяти 2 на первый вход вычислителя 3. Сигнал V, отображающий направление движения грузонесущего каротажного кабеля (скважинного прибора) по факту обнаружения магнитной метки, поступает на третий вход вычислителя 3 из БОН 5; при спуске скважинного прибора V=1, при подъеме прибора V=-1.
Новое значение расстояния Lб от новой базовой магнитной метки до скважинного прибора поступает со второго выхода вычислителя 3 на вход блока памяти 2, в котором оно запоминается (хранится для последующего определения глубины спуска по факту обнаружения следующей магнитной метки).
6. Используют новую базовую магнитную метку и новое значение расстояния Lб для дальнейшего определения глубины спуска скважинного прибора Lпр, для чего переходят к выполнению п.3.
Подобное выполнение способа определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах позволяет повысить точность определения глубины спуска скважинного прибора Lпр и повысить точность регистрации на записи каротажной кривой местоположения магнитной метки. Указанное расширение функциональных возможностей в заявляемом способе достигается за счет того, что:
а) и магнитная разметка кабеля (нанесение магнитных меток на его броню), и определение глубины спуска скважинного прибора осуществляются в одном и том же месте, у устья скважины, практически, в одно и то же время, в одинаковых условиях, и в момент нанесения на броню кабеля магнитной метки, и при определении глубины по факту обнаружения магнитной метки, при этом удлинение кабеля под действием силы веса скважинного прибора и части грузонесущего каротажного кабеля, находящегося в скважине, а также под действием сил, возникающих при движении скважинного прибора в скважине, заполненной промывочной жидкостью, при постоянной скорости движения скважинного прибора можно считать неизменным;
б) в заявляемом способе считывание магнитной метки всегда происходит непосредственно после ее нанесения на броню кабеля, когда интенсивность ее намагниченности максимальна, что обеспечивает максимальное значение эквивалентной энергии сигнала считываемой магнитной метки, максимальное значение отношения сигнал/шум h2 при считывании магнитных меток, соответственно повышение помехозащищенности обнаружения сигналов магнитных меток и, как следствие, снижение вероятности пропуска и регистрации ложных магнитных меток, а также снижение погрешности регистрации на записи каротажной кривой местоположения обнаруженной магнитной метки. В способе-прототипе [1] процедуры нанесения магнитных меток на броню кабеля и процедура измерения глубины, как правило, разнесены во времени; часто измерение глубины осуществляется после многократного спуска кабеля в скважину, где под действием повышенной температуры происходит частичное размагничивание магнитных меток; в результате, в среднем, значение эквивалентной энергии сигнала считываемой магнитной метки в способе-прототипе [1] меньше значения эквивалентной энергии сигнала соответствующей считываемой магнитной метки в заявляемом способе, чем и обеспечивается относительное повышение помехозащищенности обнаружения этих магнитных меток.
Для последующего анализа рассмотрим структуру считывающего устройства 1. В [2] обоснована и приведена структурная схема соответствующего считывающего устройства, состоящего из последовательно соединенных магнитоэлектрического преобразователя, оптимального фильтра, согласованного с сигналом считываемой магнитной метки, и решающей схемы. С помощью магнитоэлектрического преобразователя осуществляется преобразование считываемой с брони кабеля магнитной метки в электрический сигнал S(t). Обработка считываемых магнитных меток в составе считывающего устройства осуществляется оптимальным согласованным фильтром, который в классе линейных устройств обеспечивает наибольшее отношение сигнал/шум на входе решающей схемы [4]. Фильтр называется согласованным с сигналом S(t), если его импульсная переходная характеристика g(t) с точностью до постоянного множителя с совпадает с зеркальным отображением сигнала S(t), сдвинутым на интервал времени Т, длительность которого больше или равна длительности этого сигнала [4]; для упрощения примем, что Т равно длительности сигнала S(t)

Напомним, что при подаче на вход согласованного фильтра с импульсной характеристикой (4) сигнала S(t) на его выходе формируется сигнал y(t), с точностью до постоянного множителя с, совпадающего по форме с корреляционной функцией B(t-Т) сигнала S(t), сдвинутой по оси времени на промежуток Т [4]. Если предположить, что на вход считывающего устройства действует аддитивная гауссова помеха ξ(t) типа "белого" шума с нулевым математическим ожиданием и спектральной плотностью 2ν2 0 [4], то на входе согласованного фильтра действует суммарный сигнал x(t)

Выходной сигнал y(t) фильтра, согласованного с сигналом S(t), имеет вид

где N0(t) - отклик согласованного фильтра на поступающую на его вход аддитивную помеху ξ(t).
Сигнал S(t) считается обнаруженным в момент времени t0, если выходной сигнал фильтра у(t0) достигает некоторого порога U0. Величина пU0 определяется критерием приема (идеального наблюдателя, среднего риска, минимума вероятности пропуска цели,...) [4]. Без потери общности можно использовать критерий идеального наблюдателя, для которого U0=с·B(0)/2.
Магнитная метка считается обнаруженной, если выполняется равенство

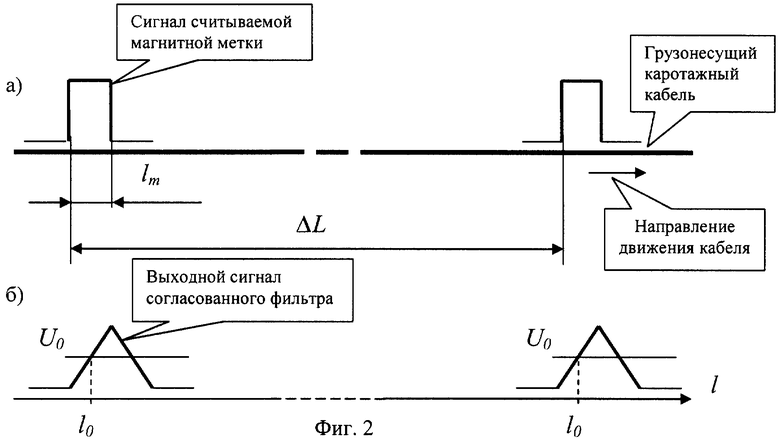
На фиг.2 представлены диаграммы, поясняющие процесс считывания и обнаружения в точке l0 магнитной метки считывающим устройством 1. Для примера рассматривается случай, когда сигнал считываемой магнитной метки имеет форму прямоугольного импульса, а грузонесущий каротажный кабель движется справа налево с постоянной скоростью v, см. фиг.2а. В качестве независимой переменной на диаграммах используется координата l, которая связана с независимой переменной t соотношением l=v·t, так что протяженность представленной на фиг.2а магнитной метки равна lm=v·Т. Осуществляя замену переменных в (7), получаем, что сигнал магнитной метки обнаруживается в точке l0, которую можно найти из равенства

Проведя усреднение по множеству магнитных меток, в силу отсутствия постоянной составляющей у шума получаем, что обнаружение магнитной метки и, соответственно, выдача сигнала-признака обнаружения магнитной метки осуществляется не по началу магнитной метки, а точке l0, отстоящей от начала метки против направления движения кабеля на величину (lm-l0). Для приведенного на фиг.2 примера этот сдвиг достигает половины длины магнитной метки lm. В известном способе [1] при разметке кабеля в стационарных условиях на установке УРС-1010 [5] длина магнитной метки оценивается величиной lm=160 мм, что позволяет сделать вывод о необходимости учета смещения точки обнаружения магнитной метки относительно ее начала на величину (lm-l0) при расчете глубины спуска скважинного прибора Lпр по формуле (2). Величина указанного смещения точки обнаружения магнитной метки относительно ее начала (lm-l0) определяется двумя факторами:
- видом сигнала S(t) считываемой магнитной метки, соответственно, характером поведения его функции корреляции В(l-lm);
- порогом принятия решения U0 в решающей схеме считывающего устройства, значение которого определяется выбранным критерием приема.
Поэтому для учета упомянутого смещения точки обнаружения магнитной метки необходимо предварительно, исходя из вида применяемых для измерения глубины сигналов магнитных меток S(t) и значения порога принятия решения U0 в решающей схеме считывающего устройства, решить равенство

относительно (l0-lm). Использовать полученное значение ожидаемого смещения (l0-lm) точки обнаружения магнитной метки при расчете глубины спуска скважинного прибора Lпр по формуле

а также для расчета расстояния Lб от новой базовой магнитной метки до скважинного прибора

С учетом приведенных доводов в заявляемом способе определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, включающем предварительное закрепление на конце грузонесущего каротажного кабеля скважинного прибора на расстоянии Lб, от предварительно нанесенной на броню кабеля базовой магнитной метки, запоминание сигнала, соответствующего расстоянию Lб, спуск скважинного прибора в скважину или его подъем, определение направления движения кабеля V, размещение вблизи устья скважины вдоль движущегося грузонесущего каротажного кабеля последовательно, в направлении его движения ряда, состоящего из устройства размагничивания (УР), устройства нанесения магнитных меток (УНМ) и считывающего устройства (УС), таким образом, что в первоначальный момент базовая магнитная метка находится на интервале между устройством размагничивания и считывающим устройством, отстоящим от УНМ вдоль кабеля на фиксированное расстояние ΔL, запоминание сигнала, соответствующего расстоянию ΔL, фиксацию расстояния L0 между УС и точкой отсчета глубины спуска скважинного прибора, запоминание сигнала, соответствующего расстоянию L0, осуществление размагничивания брони грузонесущего каротажного кабеля, проходящего у УР, обнаружение магнитных меток на движущемся грузонесущем каротажном кабеле путем их считывания считывающим устройством, одновременные по факту обнаружения считывающим устройством на броне кабеля магнитной метки регистрацию местоположения метки на записи каротажной кривой и расчет глубины спуска скважинного прибора Lпр, нанесение с помощью УНМ на броню кабеля новой магнитной метки, которую принимают за базовую магнитную метку, принятие нового значения расстояния Lб от новой базовой магнитной метки до скважинного прибора, запоминание сигнала, соответствующего новому значению расстояния Lб, использование новой базовой магнитной метки и нового значения расстояния Lб для последующего определения глубины спуска скважинного прибора Lпр, определяют предварительно, исходя из вида применяемых для измерения глубины сигналов магнитных меток S(t) и значения порога принятия решения U0 в считывающем устройстве, ожидаемую величину смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), запоминают сигнал, соответствующий ожидаемой величине смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), рассчитывают глубину спуска скважинного прибора Lпр исходя из значения расстояния Lб от базовой магнитной метки до скважинного прибора, расстояния L0 между УС и точкой отсчета глубины, с использованием значения упомянутой ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0) и информации о направлении движения грузонесущего каротажного кабеля V, принимают в качестве нового значения расстояния Lб от базовой магнитной метки до скважинного прибора величину, рассчитанную исходя из глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0) и информации о направлении движения грузонесущего каротажного кабеля V.
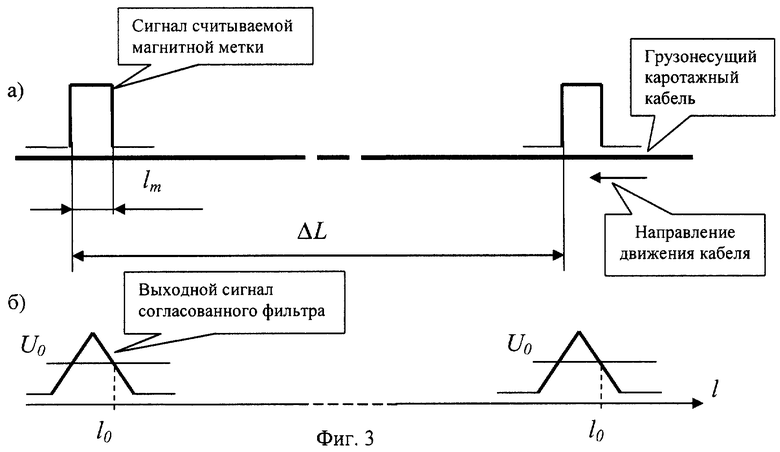
На фиг.3 представлены диаграммы, поясняющие процесс считывания и обнаружение в точке l0 магнитной метки считывающим устройством 1 для случая движения грузонесущего каротажного кабеля в направлении, противоположном движению кабеля, представленном на диаграммах фиг.2. Из диаграмм видно, что положение точки обнаружения магнитной метки зависит от направления движения; отличие в точках обнаружения магнитных меток при смене направления движения кабеля достигает протяженности магнитной метки lm.
Указанное отличие учитывается в заявляемом способе определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, включающем предварительное закрепление на конце грузонесущего каротажного кабеля скважинного прибора на расстоянии Lб, от предварительно нанесенной на броню кабеля базовой магнитной метки, запоминание сигнала, соответствующего расстоянию Lб, предварительное определение, исходя из вида применяемых для измерения глубины сигналов магнитных меток S(t) и значения порога принятия решения U0 в считывающем устройстве, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), запоминают сигнал, соответствующий ожидаемой величине смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), спуск скважинного прибора в скважину или его подъем, определение направления движения кабеля V, размещение вблизи устья скважины вдоль движущегося грузонесущего каротажного кабеля последовательно, в направлении его движения ряда, состоящего из устройства размагничивания (УР), устройства нанесения магнитных меток (УНМ) и считывающего устройства (УС), таким образом, что в первоначальный момент базовая магнитная метка находится на интервале между устройством размагничивания и считывающим устройством, отстоящим от УНМ вдоль кабеля на фиксированное расстояние ΔL, запоминание сигнала, соответствующего расстоянию ΔL, фиксацию расстояния L0 между УС и точкой отсчета глубины спуска скважинного прибора, запоминание сигнала, соответствующего расстоянию L0, осуществление размагничивания брони грузонесущего каротажного кабеля, проходящего у УР, обнаружение магнитных меток на движущемся грузонесущем каротажном кабеле путем их считывания считывающим устройством, одновременные по факту обнаружения считывающим устройством на броне кабеля магнитной метки регистрацию местоположения метки на записи каротажной кривой и расчет глубины спуска скважинного прибора Lпр, нанесение с помощью УНМ на броню кабеля новой магнитной метки, которую принимают за новую базовую магнитную метку, принятие нового значения расстояния Lб от базовой магнитной метки до скважинного прибора, определенную с использованием рассчитанной глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0) и информации о направлении движения грузонесущего каротажного кабеля V, использование новой базовой магнитной метки и нового значения расстояния Lб для последующего определения глубины спуска скважинного прибора Lпр, предварительно задают протяженность магнитной метки lm, запоминают сигнал, соответствующий протяженности магнитной метки lm, предварительно задают дополнительную переменную W, соответствующую ожидаемому направлению движения грузонесущего каротажного кабеля, запоминают сигнал, соответствующий переменной W, сравнивают по факту обнаружения считывающим устройством магнитной метки текущее направление движения кабеля V с ожидаемым направлением движения кабеля W, хранящимся в памяти, рассчитывают глубину спуска скважинного прибора Lпр с использованием упомянутых с использованием значений упомянутых длины отрезка Lб между закрепленным на конце грузонесущего каротажного кабеля скважинным прибором и нанесенной на броню кабеля базовой магнитной меткой, расстояния L0 между УС и точкой отсчета глубины, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), информации о направлении движения грузонесущего каротажного кабеля V, протяженности магнитной метки lm, результата сравнения ожидаемого W и текущего V направлений движения кабеля, принимают и запоминают в качестве нового ожидаемого направления движения грузонесущего каротажного кабеля W направление V, совпадающее с направлением движение кабеля по факту обнаружения магнитной метки.
С учетом изложенного расчет глубины спуска скважинного прибора Lпр должен осуществляться по формуле

Для реализации указанных возможностей в заявляемом устройстве определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах, состоящем из считывающего устройства (УС), расположенного у движущегося грузонесущего каротажного кабеля и отстоящего от точки отсчета глубины вдоль кабеля на фиксированное расстояние L0, а также из последовательно соединенных блока памяти и вычислителя, выход которого служит первым выходом устройства определения глубины спуска скважинного прибора, из блока определения направления движения грузонесущего каротажного кабеля (БОН), из последовательно размещенных в линию, проходящую через УС и ориентированную вдоль грузонесущего каротажного кабеля, первого устройства размагничивания (УР), первого устройства нанесения магнитных меток (УНМ), второго устройства нанесения магнитных меток (УНМ), второго устройства размагничивания (УР), причем упомянутое УС расположено между первым УНМ и вторым УНМ на фиксированном расстоянии ΔL от каждого из устройств нанесения магнитных меток, из первого и второго коммутаторов, логической схемы "ИЛИ", выход которой служит вторым выходом устройства определения глубины спуска скважинного прибора, причем выход БОН подключен к соединенным вместе управляющим входам первого и второго УР, к управляющим входам первого и второго коммутаторов, ко второму входу вычислителя, выход УС подключен к соединенным вместе информационным входам первого, второго коммутаторов и третьему входу вычислителя, выход первого коммутатора подключен к соединенным вместе управляющему входу первого УНМ и первому входу логической схемы "ИЛИ", выход второго коммутатора подключен к соединенным вместе управляющему входу второго УНМ и второму входу логической схемы "ИЛИ", второй выход вычислителя соединен с первым входом блока памяти, дополнительно введен блок сравнения, выход которого подключен к четвертому входу вычислителя, первый вход блока сравнения соединен со вторым входом блока памяти и подключен к выходу БОН, второй вход блока сравнения подключен ко второму выходу блока памяти, третий вход которого подключен к выходу УС.
Пример подобного выполнения устройства определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах приведен на фиг.4. Устройство содержит считывающее устройство 1, блок памяти 2, вычислитель 3, выход которого служит первым выходом устройства определения глубины спуска скважинного прибора 4, блок определения направления движения грузонесущего каротажного кабеля 5, первое устройство размагничивания 6, первое устройство нанесения магнитных меток 7, второе устройство нанесения магнитных меток 8, второе устройства размагничивания 9, первый коммутатор 10, второй коммутатор 11, логическая схема "ИЛИ" 12, выход которой подключен ко второму выходу устройства определения глубины спуска скважинного прибора 13, блок сравнения 14.
Работа заявляемых способа и устройства заключается в последовательной реализации следующих операций.
1. Предварительно закрепляют на конце грузонесущего каротажного кабеля скважинный прибор на расстоянии Lб от предварительно нанесенной на броню кабеля базовой магнитной метки, запоминают сигнал, соответствующий расстоянию Lб.
Сигнал, соответствующий значению расстояния Lб, хранится в блоке памяти 2.
2. Предварительно определяют, исходя из вида применяемых для измерения глубины сигналов магнитных меток S(t) и значения порога принятия решения U0 в считывающем устройстве, ожидаемую величину смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), запоминают сигнал, соответствующий ожидаемой величине смещения точки обнаружения магнитной метки относительно ее начала (lm-l0).
Сигнал, соответствующий значению ожидаемой величине смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), хранится в блоке памяти 2.
3. Предварительно задают дополнительную переменную W, соответствующую ожидаемому направлению движения грузонесущего каротажного кабеля, запоминают сигнал, соответствующий переменной W.
Сигнал, соответствующий ожидаемому направлению движения грузонесущего каротажного кабеля W, хранится в блоке памяти 2.
4. Спускают или поднимают скважинный прибор в скважине.
5. Определяют направление движения кабеля V, размещают вблизи устья скважины вдоль движущегося грузонесущего каротажного кабеля последовательно, в направлении его движения ряд, состоящий из устройства размагничивания (УР), устройства нанесения магнитных меток (УНМ) и считывающего устройства (УС), отстоящего от УНМ вдоль кабеля на фиксированное расстояние ΔL, запоминают сигнал, соответствующий расстоянию ΔL.
Сигнал, соответствующий значению фиксированного расстояния ΔL, хранится в блоке памяти 2.
Определение направления движения грузонесущего каротажного кабеля осуществляется с помощью БОН 5. При движении кабеля вниз, в скважину, для определения глубины используется ряд из первого УР 6, первого УНМ 7 и устройства считывания 1. При движении кабеля вверх, из скважины, для определения глубины используется ряд из второго УР 9, второго УНМ 8 и устройства считывания 1. Выбор ряда из УР, УНМ, УС осуществляется выходным сигналом БОН 5, поступающим на управляющие входы первого 6 и второго 9 устройств размагничивания, на управляющие входы первого 10 и второго 11 коммутаторов.
6. Ряд из УР, УНМ и УС устанавливают таким образом, чтобы в первоначальный момент базовая магнитная метка находилась на интервале между УР и УС. Фиксируют расстояние L0 между УС и точкой отсчета глубины спуска скважинного прибора, запоминают сигнал, соответствующий расстоянию L0, осуществляют размагничивание брони грузонесущего каротажного кабеля, проходящего у УР
Сигнал, соответствующий расстоянию L0 между УС 1 и точкой отсчета глубины спуска скважинного прибора, хранится в блоке памяти 2.
7. Осуществляют считывание магнитной метки.
8. По факту обнаружения считывающим устройством на броне кабеля магнитной метки осуществляют регистрацию местоположения метки на записи каротажной кривой и рассчитывают глубину спуска скважинного прибора Lпр с использованием значений упомянутых длины отрезка Lб между закрепленным на конце грузонесущего каротажного кабеля скважинным прибором и нанесенной на броню кабеля базовой магнитной меткой, расстояния L0 между УС и точкой отсчета глубины, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), информации о направлении движения грузонесущего каротажного кабеля V, протяженности магнитной метки lm и результата сравнения ожидаемого W и текущего V направлений движения кабеля, наносят с помощью УНМ на броню кабеля новую магнитную метку, которую принимают за новую базовую магнитную метку, принимают в качестве нового значения расстояния Lб от базовой магнитной метки до скважинного прибора величину, рассчитанную исходя из глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0) и информации о направлении движения грузонесущего каротажного кабеля V, запоминают сигнал, соответствующий новому значению расстояния Lб, принимают и запоминают в качестве нового ожидаемого направления движения грузонесущего каротажного кабеля W направление V, совпадающее с направлением движение кабеля по факту обнаружения магнитной метки.
По факту обнаружения считывающим устройством 1 на броне кабеля магнитной метки с выхода логической схемы "ИЛИ" 12 на второй выход 13 устройства определения глубины выдается сигнал-признак обнаружения магнитной метки, которым осуществляют регистрацию местоположения метки на записи каротажной кривой. С помощью вычислителя 3 рассчитывают глубину спуска скважинного прибора Lпр с использованием поступающих из блока памяти 2 значений упомянутых фиксированного расстояния ΔL между УНМ и УС, расстояния L0 между УС и точкой отсчета глубины, ожидаемой величины смещения точки обнаружения магнитной метки относительно ее начала (lm-l0), протяженности магнитной метки lm, приходящей из БОН 5 информации о направлении движения грузонесущего каротажного кабеля V, результата сравнения в блоке сравнения 14 ожидаемого W и текущего V направлений движения кабеля.
Вычисляют с помощью вычислителя 3 по формуле (11) новое значение расстояния Lб между скважинным прибором и новой базовой магнитной меткой, запоминают с помощью блока памяти 2 сигнал, соответствующий новому значению расстояния Lб; указанный сигнал о значении расстояния Lб со второго выхода вычислителя 3 поступает на первый вход блока памяти 2.
Принимают и запоминают в качестве нового ожидаемого направления движения грузонесущего каротажного кабеля W направление V, совпадающее с направлением движение кабеля по факту обнаружения магнитной метки. Сигнал, соответствующий направлению движение кабеля V, с выхода БОН 5 поступает на второй вход блока памяти 2 и запоминается в нем.
9. Используют новую базовую магнитную метку и новое значение расстояния Lб для последующего определения глубины спуска скважинного прибора Lпр, для чего переходят к п.4.
Блоки, входящие в состав заявляемого устройства, известны в технике. Для их реализации могут быть использованы как соответствующие блоки известного устройства, так и блоки, описанные в литературе.
В качестве считывающего устройства 1 можно рекомендовать использование потокозависимой считывающей магнитной головки, описанной в [6]. В качестве устройств размагничивания 6, 7 и устройств нанесения магнитных меток 7, 8 могут применяться размагничивающие и записывающие магнитные головки, например, из [5]. Варианты построения первого 10 и второго 11 коммутаторов, логической схемы "ИЛИ" 12, блока памяти 2, вычислителя 3, блока сравнения 14, можно найти в [7]. В качестве БОН 5 может быть применен соответствующий блок, описанный в [8].
Подобное выполнение способа и устройства определения глубины спуска скважинного прибора при проведении каротажных исследований в скважинах позволяет повысить точность определения глубины спуска скважинного прибора Lпр и повысить точность регистрации на записи каротажной кривой местоположения магнитной метки.
Источники информации
1. Техническая инструкция по проведению геофизических исследований скважин. М.: Недра, 1985.
2. Пат. РФ 2172832. Способ промера глубины спуска скважинного прибора при каротажных исследованиях в скважинах.
3. Заворотько Ю.М. Геофизические методы исследования скважин. Учебник для техникумов. М.: Недра, 1983.
4. Теория электрической связи: Учебник для вузов / А.Г.Зюко, Д.Д.Кловский, В.И.Коржик, М.В.Назаров; Под ред. Д.Д.Кловского. - М.: Радио и связь, 1998.
5. Установка разметочная стационарная УРС-1010. Техническое описание и инструкция по эксплуатации. АЯП.2.787.002 ТО. - М.: Мин. нефтяной промышленности, 1977.
6. Лауфер М.В., Крыжановский И.А. Теоретические основы магнитной записи на движущийся носитель - Киев, 1982.
7. Титце У., Шенк К. Полупроводниковая схемотехника. Справочное руководство./ Пер. с нем. - М., Мир, 1982.
8. Датчик оборотов вала буровой лебедки (датчик глубины.)
http//www.npf-geofizika.ru/leuza/newpagel.htm

Изобретение относится к области исследований скважин и может быть использовано при определении глубины спуска скважинного прибора. Способ включает предварительное закрепление на конце каротажного кабеля скважинного прибора на расстоянии Lб от предварительно нанесенной на броню кабеля базовой магнитной метки (ММ), спуск скважинного прибора в скважину или его подъем, обнаружение ММ на движущемся кабеле путем их считывания считывающим устройством (УС), регистрацию местоположения метки на записи каротажной кривой и расчет глубины спуска скважинного прибора Lпр по факту обнаружения ММ на кабеле. Определяют направление движения кабеля V, размещают вблизи устья скважины вдоль движущегося каротажного кабеля последовательно, в направлении его движения ряд, состоящий из устройства размагничивания (УР), устройства нанесения ММ (УНМ) и УС, отстоящего от УНМ вдоль кабеля на фиксированное расстояние ΔL. Ряд из УР, УНМ и УС размещают таким образом, чтобы в первоначальный момент базовая ММ находилась на интервале между УР и УС, фиксируют расстояние L0 между УС и точкой отсчета глубины спуска скважинного прибора. Осуществляют размагничивание брони каротажного кабеля, проходящего у УР. При обнаружении посредством УС на броне кабеля ММ принимают в качестве глубины спуска скважинного прибора Lпр разность значений упомянутых расстояния Lб и расстояния L0, наносят с помощью УНМ на броню кабеля новую ММ, которую принимают за базовую. В качестве нового значения расстояния Lб принимают величину, определенную с использованием рассчитанной глубины спуска скважинного прибора Lпр, расстояния L0 между УС и точкой отсчета глубины, фиксированного расстояния ΔL между УНМ и УС, информации о направлении движения каротажного кабеля V. Используют новую базовую ММ и новое значение расстояния Lб для последующего определения глубины спуска скважинного прибора Lпр. Величины, соответствующие расстояниям Lб, ΔL, L0 после их определения или изменения, запоминают в виде сигнала. В частном случае определяют ожидаемую величину смещения точки обнаружения ММ относительно ее начала и используют эту величину дополнительно при расчете нового значения расстояния Lб. Также могут сравнивать текущее направление движения кабеля с ожидаемым и использовать результат сравнения при расчете глубины спуска скважинного прибора Lпр с использованием расстояния Lб. Способ осуществляется устройством, включающим блок определения направления движения кабеля, последовательно размещенные в линию, ориентированную вдоль кабеля первое УР, первое УНМ, УС, второе УНМ, второе УР, причем УС расположено на фиксированном расстоянии ΔL от обоих УНМ и отстоит от точки отсчета глубины на фиксированное расстояние L0, два коммутатора, логическая схема «ИЛИ», блок памяти и вычислитель. Кроме того, устройство могут снабжать блоком сравнения, предназначенным для сравнения текущего направления движения кабеля с ожидаемым. Изобретение позволяет повысить точность определения глубины спуска скважинного прибора. 2 н. и 3 з.п.ф-лы, 4 ил.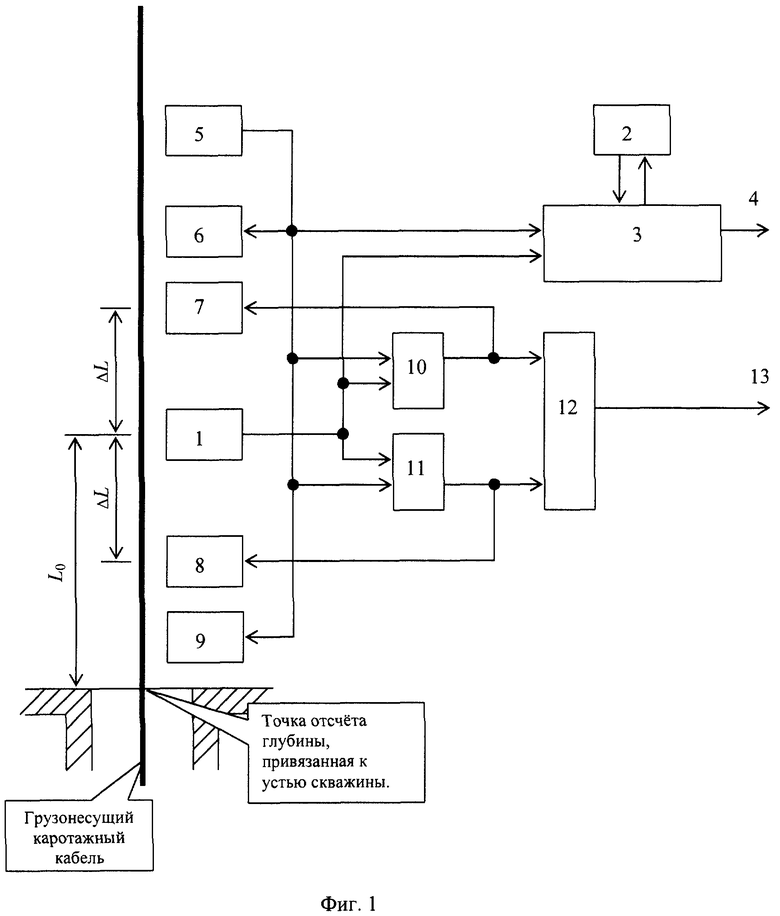
| Техническая инструкция по проведению геофизических исследований в скважинах | |||
| М.: Недра, 1985, с.152-153.RU 2172832 С2, 27.08.2001.RU 2213218 С2, 27.09.2003.RU 2002116312 А, 10.01.2004.RU 2060382 С1, 20.05.1996.SU 1487620 А1, 27.04.1996.SU 1099062 А, 23.06.1984.SU 1416678 А1, 15.08.1988.SU 1619000 А1, 07.01.1991. |

