Изобретение относится к области геофизических исследований скважин и может быть использовано для построения устройств измерения глубины спуска скважинного прибора при проведении каротажных исследований в нефтяных и газовых скважинах.
Известен способ определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, на конце которого закреплен движущийся в скважине скважинный прибор, включающий предварительное обозначение упомянутых отрезков составными магнитными метками, представляющими собой известную последовательность из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков, запоминание в соответствующем виде указанной известной последовательности участков разной степени намагниченности, задание порогового уровня U0, размещение у движущегося грузонесущего каротажного троса считывающего устройства, формирующего на своем выходе соответствующий сигнал, пропорциональный уровню намагниченности участка брони троса, находящегося у считывающего устройства, оптимальную, согласованную фильтрацию последовательности выходных сигналов считывающего устройства, сравнение отфильтрованной указанной последовательности сигналов с указанным пороговым уровнем U0, выдачу соответствующего сигнала-признака обнаруженияграницы мерного отрезка по моменту достижения отфильтрованной указанной последовательностью сигналов порогового уровня [1-3].
Известно устройство определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, на конце которого закреплен движущийся в скважине скважинный прибор, предварительно обозначенных составными магнитными метками, представляющими собой известную последовательность из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков, состоящее из последовательно соединенных считывающего устройства, размещенного у движущегося грузонесущего каротажного троса, блока согласованной фильтрации, блока сравнения, а также из блока памяти, выход которого подключен к второму входу блока сравнения, при этом блок согласованной фильтрации состоит из k согласованных фильтров, по одному на каждый из сигналов, используемых для обозначения упомянутых отрезков; входы k согласованных фильтров соединены вместе и подключены к входу блока согласованной фильтрации, выходы k согласованных фильтров являются выходами блока согласованной фильтрации подключены к соответствующим входам блока сравнения. Выход блока сравнения служит выходом устройства определения границ мерных отрезков [1-2].
Работа известных способа и устройства определения границ мерных отрезков при магнитной разметке грузонесущего каротажного троса составными метками осуществляется в последовательной реализации следующих действий.
1. Предварительно разбивают грузонесущий каротажный трос на мерные отрезки известной длины и обозначают их составными магнитными метками, представляющими собой по длине каждого из упомянутых отрезков последовательность участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков. Составные магнитные метки, используемые для обозначения упомянутых мерных отрезков, могут бытьодинаковыми или отличаться по своей структуре, также могут занимать либо всю длину упомянутых известных отрезков, либо часть этой длины. Начало составной магнитной метки соответствует границе соответствующего мерного отрезка.
2. Запоминают образцы сигналов, соответствующих указанным составным магнитным меткам. Данная информация об образцах сигналов Si(t), соответствующих указанным составным магнитным меткам, содержится в блоке согласованной фильтрации в виде характеристик соответствующих согласованных фильтров. В составе блока согласованной фильтрации для каждого Si (t) сигнала устанавливается соответствующий i-й согласованный фильтр, импульсная переходная характеристика которого gi(t) с точностью до постоянного множителя c совпадает с зеркальным отображением сигнала Si (t), сдвинутым на интервал времени t0, длительность которого больше или равна длительности этого сигнала [4].

Напомним, что при подаче на вход согласованного фильтра с импульсной характеристикой (1) сигнала Si(t) на его выходе формируется сигнал yi(t) с точностью до постоянного множителя с, совпадающего по форме с корреляционной функцией Ki(t-t0) сигнала Si(t), сдвинутой по оси времени на промежуток t0 [4].

Сигнал yi(t) достигает своего максимума в момент времени t=t0.
3. Спускают или поднимают в скважине на каротажном тросе скважинный прибор. Размещают у движущегося грузонесущего каротажного троса считывающее устройство,формирующее на своем выходе соответствующий сигнал, пропорциональный уровню намагниченности участка брони троса, находящегося в данный момент у считывающего устройства. В результате движения грузонесущего каротажного троса у считывающего устройства на выходе последнего формируется сигнальная последовательность S(t).
4. Обнаруживают границы указанных мерных отрезков путем сравнения сигналов. соответствующих считанным с движущегося грузонесущего каротажного троса магнитным меткам, с их образцами. Данные операции выполняются считывающим устройством, блоком согласованной фильтрации и блоком сравнения. Сигнальная последовательность S(t) с выхода считывающего устройства подается в блок согласованной фильтрации, на входы согласованных фильтров. Выходные сигналы согласованных фильтров уi(t) поступают в блок сравнения, где осуществляется их сравнение с пороговым уровнем U0. Значение порогового уровня U0. хранится в виде соответствующего сигнала в блоке памяти. Величина порогового уровня U0. определяется критерием приема (среднего риска, минимума вероятности пропуска цели, минимума вероятности ложного обнаружения,...) [4]. Без потери общности можно считать, что используется критерий идеального наблюдателя, для которого
Граница мерного отрезка считается обнаруженной, если выполняется условие

на выходе блока сравнения формируется соответствующий сигнал-признак обнаружения, который подается на выход устройства.
Недостатком известных способа и устройства являются ограниченные функциональные возможности, связанные с возможностью определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, на конце которого закреплен движущийся в скважине скважинный прибор, только на фиксированных скоростях движения грузонесущего каротажного троса.
Действительно, если для упрощения предположить, что для обозначения мерных отрезков, на которые разбит грузонесущий каротажный трос, применяются составные магнитные метки с одинаковой структурой, представляющие собой известную последовательность из n участков разной степени намагниченности, что длины указанных участков одинаковы и равны L, указанные участки намагничены таким образом, что магнитная индукция, характеризующая их намагниченность, принимает значения B1(l) и B2(l). Предположим также, что при размещении у движущегося грузонесущего каротажного троса с указанным методом разметки считывающего устройства на выходе последнего формируется сигнал, который может принимать два значения U1, и U2. Для определенности будем считать, что при прохождении у считывающего устройства участка с магнитной индукцией B1(l) на выходе считывающего устройства формируется сигнал U1, а при прохождении у считывающего устройства участка с магнитной индукцией В2(l) формируется сигнал U2.
Очевидно, что при движении грузонесущего каротажного троса относительно считывающего устройства на выходе последнего формируется последовательность S(t) двоичных сигналов Uk(t).

где Uk - значение сигнала Uk(t), Uk принадлежит множеству {U1,U2};
σ(t - kT) - единичная функция,

Т - длительность сигнала Uk(t), которая определяется из соотношения:
где V - скорость движения троса.
Тогда выражение (5), описывающее выходной сигнал считывающего устройства, можно привести к виду:

Импульсная характеристика g(t) оптимального фильтра, согласованного с сигналом (5)примет вид:

Как уже отмечалось, длительность промежутка времени t0 должна быть не меньше длительности последовательности S(t) выходных сигналов считывающего устройства, соответствующих составной магнитной метке. Положим ее равной t0=nТ, тогда

Откуда следует, что импульсная характеристика оптимального, согласованного фильтра, применяемого в прототипе для обнаружения составных магнитных меток зависит от направления и величины скорости движения грузонесущего каротажного троса. Поэтому, теоретически, для каждого из значений скорости движения грузонесущего каротажного троса необходимо в состав блока согласованной фильтрации вводить свой отдельный согласованный фильтр, импульсная характеристика которого задается соотношением (10). При этом практическая реализация операции согласованной фильтрации при помощи соответствующего блока согласованной фильтрации связана со значительными материальными затратами, хотя бы по той причине, что скорость спуска и подъема скважинного прибора в скважине может изменяться в пределах от 0 до 10000 [м/час], в том числе, непрерывно и по нелинейному закону [5,6].
Целью заявляемых способа и устройства является расширение их функциональных возможностей, связанное с возможностью определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса составными метками во всем диапазоне изменения скоростей движения грузонесущего каротажного троса.
Поставленная цель достигается тем, что в способе определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, на конце которого закреплен движущийся в скважине скважинный прибор, включающем предварительное обозначение упомянутых отрезков составными магнитными метками, представляющимисобой известную последовательность из п участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков, задание порогового уровня U0, оптимальную, согласованную фильтрацию последовательности сигналов, сравнение отфильтрованной указанной последовательности сигналов с пороговым уровнем U0, выдачу соответствующего сигнала-признака достижения указанной отфильтрованной последовательностью сигналов упомянутого порогового уровня U0, наносят с тактовым интервалом L на броню грузонесущего каротажного троса упомянутые участки разной степени намагниченности, последовательность которых используется для представления составных магнитных меток, запоминают сигнал, соответствующий длине тактового интервала L, размещают вдоль движущегося грузонесущего каротажного троса с тактовым интервалом L ряд из n считывающих устройств, на выходе каждого из которых формируется соответствующий сигнал, пропорциональный уровню намагниченности участка брони троса, находящегося у соответствующего считывающего устройства, количество n считывающих устройств в ряду равно количеству упомянутых участков разной степени намагниченности, используемых для представления составных магнитных меток, устанавливают на выходах считывающих устройств усилители, задают коэффициенты передачи усилителей таким образом, чтобы ряд из произведений коэффициентов передачи усилителей и соответствующих им считывающих устройств в ряду с точностью до постоянного множителя соответствовал зеркальному отображению указанной известной последовательности участков разной степени намагниченности участков брони троса, используемой для представления составных магнитных меток, сдвинутому вдоль грузонесущего каротажного троса относительно границы упомянутого мерного отрезка на длину Lm, соответствующую длине n упомянутых участков разной степени намагниченности, последовательность которых используется для представления составных магнитных меток, суммируют выходные сигналы усилителей,используют сумму выходных сигналов усилителей в качестве указанной отфильтрованной последовательности, определяют направление V движения грузонесущего каротажного троса, принимают решение о положении границы указанного мерного отрезка по моменту выдачи упомянутого сигнала-признака достижения указанной отфильтрованной последовательностью сигналов упомянутого порогового уровня U0 с использованием информации о длине тактового интервала L, о величине порогового уровня U0 и о направлении V движения каротажного троса.
При этом в устройстве определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, на конце которого закреплен движущийся в скважине скважинный прибор, предварительно обозначенных составными магнитными метками, представляющими собой известную последовательность из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков с тактовым интервалом L, состоящим из последовательно соединенных блока памяти и блока сравнения, причем выход блока сравнения служит выходом устройства, введены размещенные вдоль движущегося грузонесущего каротажного троса с тактовым интервалом L ряд из n считывающих устройств, выходы которых через соответствующие n усилителей подключены на соответствующие входы n-входового блока суммирования, выход блока суммирования соединен со вторым входом блока сравнения, количество n указанных считывающих устройств, усилителей и входов блока суммирования равно количеству n упомянутых участков разной степени намагниченности в последовательности, используемой для представления составных магнитных меток, а ряд из произведений коэффициентов передачи считывающих устройств и соответствующих им усилителей в ряду с точностью до постоянного множителя соответствует зеркальному отображению указанной известной последовательности участков разной степени намагниченности участков брони троса, используемойдля представления составных магнитных меток, сдвинутому вдоль грузонесущего каротажного трос относительно границы упомянутого участка на длину Lm, соответствующую длине n упомянутых участков разной степени намагниченности, последовательность которых используется для представления составных магнитных меток, также введены вычислитель и блок определения направления движения грузонесущего каротажного троса, первый вход вычислителя соединен с выходом блока сравнения, второй вход вычислителя подключен к выходу блока определения направления движения грузонесущего каротажного троса, третий вход вычислителя подключен к соединенным вместе выходу блока памяти и первому входу блока сравнения, выход вычислителя служит вторым выходом устройства определения границ мерных отрезков.
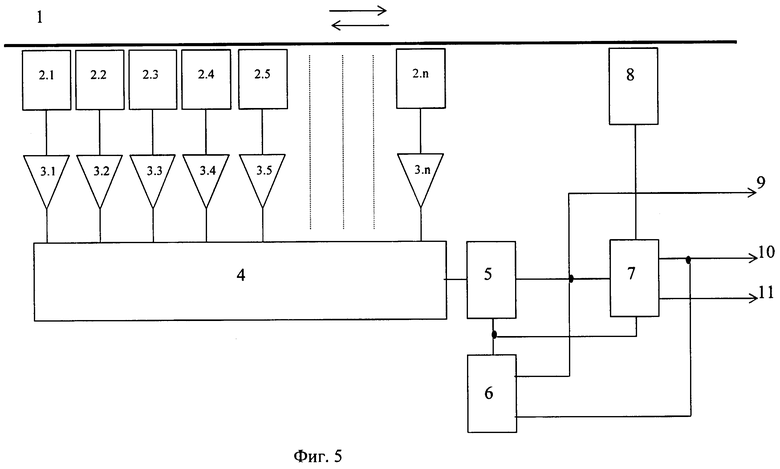
Заявляемое изобретение поясняется примером конкретного выполнения устройства определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса, представленным на фиг.1.
Устройство определения границ мерных отрезков на броне движущегося грузонесущего каротажного троса 1, на конце которого закреплен движущийся в скважине скважинный прибор, предварительно обозначенных составными магнитными метками, представляющими собой известную последовательность из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню указанного троса по длине этих отрезков с тактовым интервалом L, содержит n считывающих устройств 2.1-2.n, размещенных с тактовым интервалом L вдоль движущегося грузонесущего каротажного троса, n усилителей 3.1-3.n, блок суммирования 4, блок сравнения 5, блок памяти 6, вычислитель 7, блок определения направления движения 8 грузонесущего каротажного троса. Выходы усилителей 3.1-3.n подключены к соответствующим входам блока суммирования. Выход блока сравнения 5 подключен к соединенным вместе первому входу вычислителя 7 и первому выходу 9 устройства определенияграниц мерных отрезков. Второй вход вычислителя 7 подключен к выходу блока определения направления движения 8 грузонесущего каротажного троса, выход блока памяти 6 подключен к соединенным вместе первому входу блока сравнения 5 и третьему входу вычислителя 7, второй вход блока сравнения 5 соединен с выходом бока суммирования 4, выход вычислителя 7 служит вторым выходом 10 устройства определения границ мерных отрезков.
Работа способа заключается в последовательной реализации устройством следующих операций.
1. Предварительно разбивают грузонесущий каротажный трос на мерные отрезки известной длины и обозначают их составными магнитными метками, представляющими собой по длине каждого из упомянутых отрезков последовательность В(l) из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных с тактовым интервалом L на броню указанного троса по длине этих отрезков. Составные магнитные метки, используемые для обозначения упомянутых мерных отрезков, могут быть одинаковыми или отличаться по своей структуре, также занимать либо всю длину упомянутых известных отрезков, либо часть этой длины. Начало составной магнитной метки соответствует границе соответствующего мерного отрезка.
2. Запоминают указанную известную последовательность В{1) из n участков разной степени намагниченности, используемых для представления составной магнитной метки.
где Вi - магнитная индукция i -го участка;
σ(l-iL) - единичная функция,

L - длительность тактового интервала, с которым на броню каротажного троса нанесены участки разной степени намагниченности, последовательность которых используется в качестве составной магнитной метки.
Информацию об известной последовательности В(l) из n участков разной степени намагниченности используют в форме задания коэффициентов передачи усилителей, см. ниже, п.6.
3. Запоминают сигналы, соответствующие длине казанного тактового интервала L и упомянутого порогового уровня U0. Данные сигналы запоминаются в блоке памяти 6.
4. Определяют направление движения грузонесущего каротажного троса при спуске и подъеме в скважине, закрепленного на конце скважинного прибора. Данная операция осуществляется с помощью блока определения направления движения 8 грузонесущего каротажного троса. На выходе блока определения направления движения 8 формируется соответствующий сигнал о направлении движения грузонесущего каротажного троса.
5. Размещают с тактовым интервалом L вдоль движущегося грузонесущего каротажного троса ряд из n считывающих устройств 2.1-2.n. На выходе каждого из считывающих 2.1-2.n устройств формируется сигнал, пропорциональный уровню намагниченности участка брони троса, проходящего у соответствующего считывающего устройства. Количество n считывающих устройств 2.1-2.n в ряду равно количеству упомянутых в п.1 участков разной степени намагниченности, используемых для представления составныхмагнитных меток. Тактовый интервал L, с которым n считывающих устройств 2.1-2.n размещают вдоль движущегося грузонесущего каротажного троса, равен тактовому интервалу L, с которым на броню каротажного троса нанесены участки разной степени намагниченности, последовательность которых используется в качестве составной магнитной метки.
6. Устанавливают на выходах считывающих устройств 2.1-2.n усилители 3.1-3.n, задают коэффициенты передачи усилителей 3.1-3.n таким образом, чтобы ряд из произведений коэффициентов передачи считывающих устройств 2.1-2.n и коэффициентов передачи соответствующих усилителей 3.1-3.n им с точностью до постоянного множителя c соответствовал зеркальному отображению указанной в п.1 известной последовательности участков разной степени намагниченности участков брони троса, использованных для представления составных магнитных меток.
Обозначая коэффициент передачи j -то считывающего устройства через Рi, а коэффициент передачи включенного последовательно с ним соответствующего j -то усилителя через Кi, можно записать, что

где с - некоторая постоянная,
a Bn+1-j - магнитная индукция участка с порядковым номером (n+1-j) в известной последовательности участков разной степени намагниченности брони троса, использованных для представления составных магнитных меток.
7. Суммируют выходные сигналы усилителей, используют результат суммирования в качестве выходного сигнала оптимального, согласованного фильтра. Операция суммирования выполняется в блоке суммирования 4.
Несложно показать, что при движении грузонесущего каротажного троса 1, на броню которого на длине Δl, стремящейся к 0, нанесен одиночный магнитный импульс В=1 [Tл], вдоль ряда из n считывающих устройств 2.1-2.n, по мере последовательного продвижения указанного магнитного импульса от считывающего устройства с номером 2.1 до считывающего устройства с номером 2.n на выходе блока суммирования 4 формируется выходной сигнал g(l), который является функцией длины l отрезка, измеренной от начала ряда считывающих устройств 2.1-2.n.
Учитывая (13), имеем:
Принимая во внимание (11) и (12), получаем:

Откуда следует, что

Так как протяженность составной магнитной метки Lm, равна

то, после подстановки (17), (18) в (15), получаем

Меняя индекс суммирования, имеем

где

Принимая во внимание (11), получаем, что:

По мере продвижения составной магнитной метки вдоль ряда считывающих устройств 2.1-2.n на выходе блока суммирования 4 формируется сигнал, который является функцией длины 1 отрезка, измеренной от начала ряда считывающих устройств 2.1-2.n и может быть найден из выражения:
где K(l-Lm) - пространственная функция корреляции составной магнитной метки.
При сравнении выражений (20), (21), (23) и выражений (9), (10), (2) видно, что совокупность блоков, состоящая из ряда n считывающих устройств 2.1-2.n, n усилителей 3.1-3.n и блока суммирования 4, параметры которых описаны в п.п.1-5, может рассматриваться как эквивалентный пространственный оптимальный фильтр, согласованный с известной последовательностью из n участков разной степени намагниченности, используемых для представления составных магнитных меток. Параметры указанного пространственного оптимального, согласованного фильтра оказываются инвариантными к скорости движения грузонесущего каротажного троса, а выходной сигнал блока суммирования 4 служит выходным сигналом пространственного согласованного фильтра.
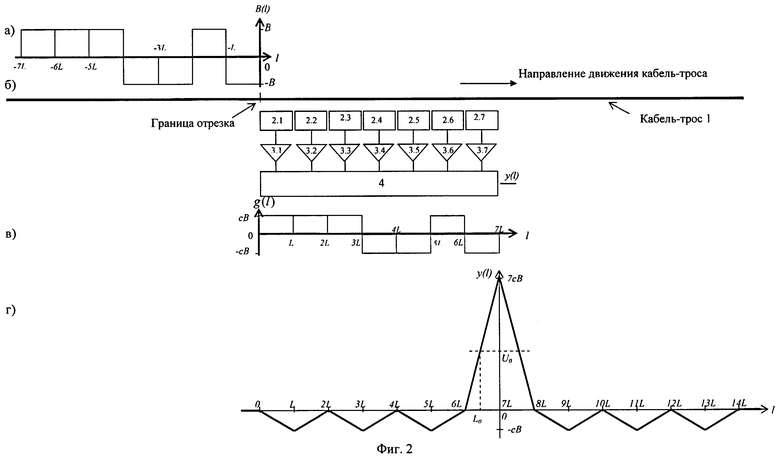
Фиг.2 иллюстрирует описанный процесс формирования выходного сигнала y(l) пространственного согласованного фильтра для конкретного случая составной магнитной метки (n=7), представленной на фиг.2а. Положение составной магнитной метки на броне троса привязано к границе мерного отрезка. На фиг. 2б изображены грузонесущий кабель-трос 1, движущийся вдоль ряда считывающих устройств 2.1-2.n, на выходах которых установлены соответствующие усилители 3.1-3.n, выходы последних подключены к блоку суммирования 4. На фиг.2в изображена импульсная характеристика указанного пространственного согласованного фильтра. На фиг.2г представлен выходной сигнал блока суммирования 4, который формируется при продвижении слева на право, вдоль ряда из n считывающих устройств 2.1-2.n грузонесущего каротажного троса 1 с нанесенной на его броню составной магнитной меткой, представленной на фиг.2а. Выходной сигнал блока суммирования 4 точностью до постоянного множителя с совпадает по форме с пространственной функцией корреляции K(l-Lm) указанной составной магнитной метки. Максимум сигнала на выходе блока суммирования 4 формируется, когда в результате движениягрузонесущего каротажного троса нанесенная на его броню составная магнитная метка B(l) будет расположена точно напротив ряда из n считывающих устройств 2.1-2.n. Для представленного на фиг. 2а примера составной магнитной метки максимум выходного сигнала блока суммирования 4 формируется в точке l=Lm=7L, которая соответствует правому краю ряда считывающих устройств 2.1-2.n. Правый край ряда считывающих устройств 2.1-2.n в рассматриваемом примере целесообразно принять за точку отсчета при определении места положения границы мерного отрезка.
8. Сравнивают выходной сигнал y(l) указанного пространственного согласованного фильтра с пороговым уровнем U0. Данная операция выполняется в блоке сравнения 5, на вход которого подается сигнал y(l) с выхода блока суммирования 4. Величина порогового уровня u0 выдается в блок сравнения 5 в виде соответствующего сигнала из блока памяти 6. Значение порогового уровня U0 выбирается, как и в прототипе, в соответствии с применяемым критерием обнаружения составной магнитной метки. При достижении выходным сигналом y(l) блока суммирования 4 величины порогового уровня U0. на выходе блока сравнения 5 формируется соответствующий сигнал-признак, который подается на соединенные вместе первый вход вычислителя 7 и первый выход 9 устройства определения. На фиг. 2г видно, что в рассматриваемом примере выходной сигнал блока суммирования 4 достигает величины порогового уровня U0 не в точке отсчета, соответствующей l=Lm=7L, а левее в точке L0, которую будем называть точкой обнаружения составной магнитной метки. При этом видно, что положение границы мерного отрезка совпадает с точкой обнаружения составной магнитной метки. Расстояние между точкой отсчета и точкой обнаружения составной магнитной метки может быть найдено из формулы:

где L - тактовый интервал, с которым на броню грузонесущего каротажного троса нанесены упомянутые участки разной степени намагниченности, последовательность которых используется для представления составных магнитных меток;
К(0) - максимум выходного сигнала блока суммирования 4, который формируется в точке l=Lm;
K(-L) - значение выходного сигнала блока суммирования 4, соответствующего точке l=Lm-L.
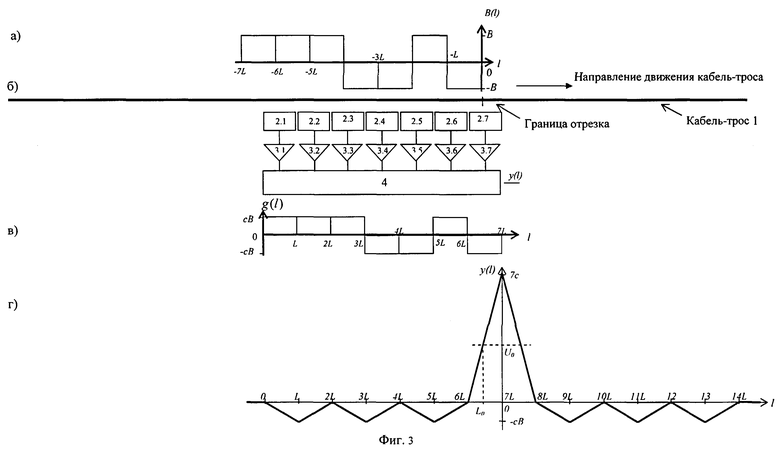
Взаимное положение составной магнитной метки и границы соответствующего отрезка относительно ряда n считывающих устройств 2.1-2.n в точке обнаружения составной магнитной метки для рассматриваемого примера представлено на фиг.3.
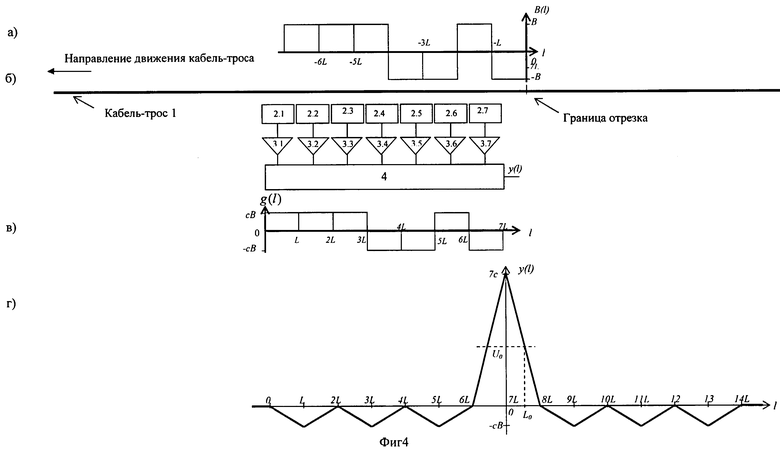
На фиг.4 представлен пример формирования выходного сигнала блока суммирования 4 и положение точки обнаружения L0 составной магнитной метки при движении грузонесущего каротажного троса в противоположном направлении относительно ряда считывающих устройств 2.1-2.n, то есть справа налево. И в этом случае расстояние между точкой отсчета и точкой обнаружения составной магнитной метки может быть найдено из выражения:

где K(L) - значение выходного сигнала блока суммирования 4, соответствующего точке l=Lm+L, в силу симметрии K(L)=K(-L).
Из рассмотренных примеров видно, что независимо от направления и величины скорости грузонесущего каротажного троса обнаружение составной магнитной меткипроисходит на постоянном расстоянии от упомянутой точки отсчета, соответствующей правому краю ряда считывающих устройств 2.1-2.n, от направления движения грузонесущего каротажного троса зависит только справа или слева от точки отсчета находится граница мерного отрезка, местоположение которой соответствует точке обнаружения.
9. Одновременно определяют направление V движения грузонесущего каротажного троса. Данная операция выполняется в блоке определения направления движения 8 грузонесущего каротажного троса. При этом в зависимости от направления движения троса на выходе блока определения направления движения 8 грузонесущего каротажного троса могут формироваться два сигнала. Предположим, что при движении троса слева на право относительно ряда считывающих устройств 2.1-2.n, как показано на фиг.2, V=-1, если трос движется в другую сторону, справа налево, как показано на фиг.4, то V=1.
10. Принимают решение о положении границы указанного мерного отрезка по моменту выдачи упомянутого сигнала-признака достижения указанной отфильтрованной последовательностью сигналов упомянутого порогового уровня U0 с использованием информации о длине тактового интервала L, о величине порогового уровня U0 и о направлении V движения каротажного троса. Данная операция выполняется в вычислителе 7, на первый вход которого поступает из блока сравнения 5 упомянутый сигнал-признак. На второй вход вычислителя 7 из блока определения направления движения 8 грузонесущего каротажного троса поступает сигнал V о направлении движения каротажного троса. На третий вход вычислителя 7 из блока памяти 6 поступают сигналы, соответствующие длине тактового интервала L и величине порогового уровня U0. В вычислителе 7 осуществляется вычисление истинного положения Lгр границы мерного участка относительно упомянутой точки отсчета, соответствующей правому краю ряда считывающих устройств 2.1-2.n.

Для представленного на фиг.2 и фиг.3 примера V = -1, следовательно:

Знак "-" в выражении (27) показывает, что в момент выдачи на первый выход устройства упомянутого сигнала-признака достижения указанной отфильтрованной последовательностью порогового уровня истинное положение границы мерного отрезка смещено влево относительно точки отсчета на величину Lгр. Соответствующий сигнал о положении границы мерного отрезка относительно точки отсчета выдается на второй выход 10 устройства определения границ мерных отрезков.
Для примера, представленного на фиг.4, в котором движение грузонесущего каротажного троса осуществляется справа налево, то есть в направлении противоположном предыдущему, V=1. В момент выдачи упомянутого сигнала-признака обнаружения составной магнитной метки истинное положение границы мерного отрезка относительно точки отсчета смещено вправо на величину Lгр

Соответствующий сигнал о положении границы мерного отрезка относительно точки обнаружения выдается на второй выход 10 устройства определения границ мерных отрезков.
Подобное выполнение способа и устройства позволяет определять границы мерных отрезков при магнитной разметке грузонесущего каротажного троса составными метками во всем диапазоне изменения скоростей движения грузонесущего каротажного троса.
При работе заявляемых способа и устройства из-за действия помех может происходить искажение формы выходного сигнала y(l) блока суммирования 4, задаваемого выражением (23), что может приводить к флюктуациям положения точки обнаружения L0 составной магнитной метки и к неверному определению положения границ Lгр мерных отрезков.
Указанные помехи можно представить в виде двух составляющих:
а) помехи, проявляющиеся как изменение степени намагниченности последовательности упомянутых участков, последовательность которых используется в качестве составных магнитных меток, назовем эти помехи магнитными и обозначим их μ(l);
б) помехи, проявляющиеся в виде случайного изменения во времени выходных уровней считывающих устройств 2.1-2.n и блока суммирования 4, вследствие внутренних шумов и наводок от внешних источников, назовем эти помехи электрическими и обозначим их ξ(t).
Очевидно, что магнитные помехи μ(l) (искажения формы составной магнитной метки) в ряде последовательно повторяющихся измерений проявляются как детерминированный процесс. Их действие может быть скомпенсировано либо соответствующим выбором коэффициентов передачи считывающих устройств 2.1-2.n и соответствующих им усилителей 3.1-3.n (см. п.6 описания работы заявляемого способа), либо восстановлением формы составных магнитных меток путем повторной магнитной разметки грузонесущего каротажного троса.
Влияние электрической составляющей помехи ξ(t) принципиально не устранимо, так как она является случайной функцией времени. Действие помехи ξ(t) может бытьчастично скомпенсировано путем вычисления математического ожидания положения границ упомянутых мерных отрезков. Для этого в заявляемом способе достаточно последовательно: произвести оценку положения границы мерного отрезка по моменту достижения выходным сигналом y(t) блока суммирования порогового уровня U0; произвести оценку положения границы мерного отрезка по моменту, когда выходной сигнал y(t) блока суммирования станет меньше порогового уровня U0; принять в качестве положения границы мерного участка среднее значение этих двух оценок, вычисленное с учетом направления движения грузонесущего каротажного троса.
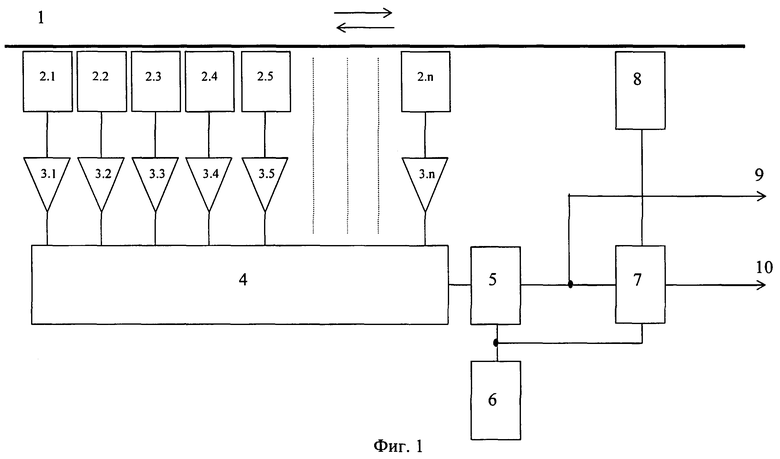
При этом в заявляемом устройстве необходимо дополнительно соединить выход блока сравнения 5 с первым входом блока памяти 6, второй вход блока памяти подключить к выходу вычислителя 7, второй выход вычислителя 7 соединить с третьим выходом устройства. Пример соответствующего выполнения заявляемого устройства приведен на фиг.5.
И так предположим, что вследствие действия электрической помехи на выходе блока суммирования 4 формируется сигнал y(l)

Выходной сигнал блока суммирования 4, задаваемый из выражения (29), достигает порогового уровня U0 в точке  . Назовем ее первой оценкой точки обнаружения,
. Назовем ее первой оценкой точки обнаружения,

где l0 - значение точки обнаружения составной магнитной метки, задаваемой из соотношений (24), (25);
ΔL0(t1) - случайная величина, учитывающая действие электрической составляющей помехи ξ(t) и соответствующая разности первой оценки точки обнаружения составной магнитной метки  и значения L0 в момент времени t1, когда выходной сигнал y(l) блока суммирования 4 достигает порогового уровня U0.
и значения L0 в момент времени t1, когда выходной сигнал y(l) блока суммирования 4 достигает порогового уровня U0.
При достижении выходным сигналом y(l) блока суммирования 4 порогового уровня u0 на выходе блока сравнения 5 формируется первый сигнал-признак обнаружения составной магнитной метки, который подается на первый выход устройства 9, первый вход вычислителя 7, на первый вход блока памяти 6. В вычислителе 7 с использованием сигнала, соответствующего направлению движения троса V1 в момент времени t1, поступающему из блока определения направления движения троса 8, и сигналов, соответствующих длине тактового интервала L и величине порогового уровня U0, приходящих и блока памяти 6, согласно с выражением (26) вычисляется первая оценка положения границы мерного отрезка  ,
,

Если точка обнаружения L0 определяется согласно (24), то первая оценка  и случайная величина ΔL0(t1) соответственно равны:
и случайная величина ΔL0(t1) соответственно равны:

где ξ(t1) - значение электрической составляющей помехи в момент времени t1.
Если точка обнаружения L0 определяется согласно (25), то первая оценка  , и случайная величина ΔL0(t1) соответственно равны:
, и случайная величина ΔL0(t1) соответственно равны:
С учетом (32) и (33) первая оценка положения границы мерного отрезка  , полученная в вычислителе 7, имеет значение
, полученная в вычислителе 7, имеет значение

Полученная в вычислителе 7 первая оценка положения границы мерного отрезка  подается на соединенные вместе второй выход 10 устройства и второй вход блока памяти 6. Указанная первая оценка положения границы мерного отрезка
подается на соединенные вместе второй выход 10 устройства и второй вход блока памяти 6. Указанная первая оценка положения границы мерного отрезка  в виде соответствующего сигнала запоминается в блоке памяти 6.
в виде соответствующего сигнала запоминается в блоке памяти 6.
По мере дальнейшего движения грузонесущего каротажного троса вдоль ряда из n считывающих устройств 2.1-2.n в точке  , назовем ее второй точкой обнаружения составной магнитной метки, выходной сигнал y(l) станет меньше порогового уровня U0. Предположим, что это произойдет в момент времени t2. На выходе блока сравнения 5 формируется второй сигнал-признак обнаружения составной магнитной метки, которыйподается на соединенные вместе первый выход устройства, первый вход вычислителя 7 и первый вход блока памяти 6.
, назовем ее второй точкой обнаружения составной магнитной метки, выходной сигнал y(l) станет меньше порогового уровня U0. Предположим, что это произойдет в момент времени t2. На выходе блока сравнения 5 формируется второй сигнал-признак обнаружения составной магнитной метки, которыйподается на соединенные вместе первый выход устройства, первый вход вычислителя 7 и первый вход блока памяти 6.
В вычислителе 7 с использованием сигнала, соответствующего направлению движения троса V2 в момент времени t2, поступающему из блока определения направления движения троса 8, и сигналов, соответствующих длине тактового интервала L и величине порогового уровня u0, приходящих и блока памяти 6, вычисляется вторая оценка положения границы мерного отрезка 

Сигнал, соответствующий второй оценке положения границы мерного отрезка  относительно точки отсчета, поступает на второй выход 10 устройства.
относительно точки отсчета, поступает на второй выход 10 устройства.
Одновременно с учетом первой оценки положения границы мерного отрезка  , поступающей в виде соответствующего сигнала из блока памяти 6, в вычислителе 7 осуществляется вычисление усредненной оценки положения границы мерного отрезка
, поступающей в виде соответствующего сигнала из блока памяти 6, в вычислителе 7 осуществляется вычисление усредненной оценки положения границы мерного отрезка  , которая выдается со второго выхода вычислителя 7 на третий выход 11 устройства.
, которая выдается со второго выхода вычислителя 7 на третий выход 11 устройства.
Указанная усредненная оценка положения границы мерного отрезка  относительно точки отсчета определяется в вычислителе 7 по формуле:
относительно точки отсчета определяется в вычислителе 7 по формуле:

Подставляя в (36) значения  и
и  , получаем
, получаем
Несложно показать, что входящее в выражение (37) модуль слагаемого  характеризующего среднее значение ошибки определения положения границы упомянутого мерного отрезка, не превышает соответствующих модулей ошибок, входящих в выражения (34) и (35). В результате положение границы упомянутого мерного отрезка, определенное по формуле (37), в среднем точнее соответствующей оценки, полученной по формуле (34).
характеризующего среднее значение ошибки определения положения границы упомянутого мерного отрезка, не превышает соответствующих модулей ошибок, входящих в выражения (34) и (35). В результате положение границы упомянутого мерного отрезка, определенное по формуле (37), в среднем точнее соответствующей оценки, полученной по формуле (34).
Работа заявляемого способа заключается в последовательной реализации заявляемым устройством вышеуказанных операций.
Блоки, входящие в состав заявляемого устройства, известны в технике. Для их реализации могут быть использованы как соответствующие блоки известного устройства, так и блоки, описанные в литературе.
В качестве считывающих устройств 2.1-2.n можно рекомендовать использование потокозависимых считывающих магнитных головок, описанных в [7]. Варианты построения усилителей 3.1-3.n, блока суммирования 4, блока сравнения 5, блока памяти 6, вычислителя 7 можно найти в [8]. В качестве блока определения направления движения троса 8 может быть применен соответствующий блок, описанный в [9].
Подобное выполнение заявляемых способа и устройства позволяет осуществлять обнаружение составных магнитных меток во всем диапазоне изменения скоростей движения грузонесущего каротажного троса.
Источники информации
1. Патент РФ №2172830 / Способ промера глубины спуска скважинного прибора при каротажных исследованиях в скважинах.
2. Патент РФ №2172831 / Способ промера глубины спуска скважинного прибора при каротажных исследованиях в скважинах.
3. Патент РФ №2172832 / Способ промера глубины спуска скважинного прибора при каротажных исследованиях в скважинах.
4. Теория электрической связи: Учебник для вузов / А.Г.Зюко, Д.Д.Кловский, В.И.Коржик, М.В.Назаров; под ред. Д.Д.Кловского. - М.: Радио и связь, 1998.
5. Техническая инструкция по проведению геофизических исследований скважин. М.: Недра, 1985.
6. Заворотько Ю.М. Геофизические методы исследования скважин. Учебник для техникумов. М.: Недра, 1983.
7. Лауфер М.В., Крыжановский И.А. Теоретические основы магнитной записи на движущийся носитель - Киев, 1982.
8. Титце У., Шенк К. Полупроводниковая схемотехника. Справочное руководство. / Пер. с нем. - М.: Мир, 1982.
9. Датчик оборотов вала буровой лебедки (датчик глубины) http//www/npf-geofizika.ru/leuza/newpagel.htm
Изобретение относится к области геофизических исследований скважин. Техническим результатом является расширение функциональных возможностей. Для этого способ включает предварительное обозначение отрезков составными магнитными метками, представляющими собой известную последовательность из n участков разной степени намагниченности, являющихся магнитными эквивалентами информационных квантов и нанесенных на броню троса по длине этих отрезков с тактовым интервалом L, запоминают сигнал, соответствующий длине тактового интервала L, размещают вдоль движущегося троса с тактовым интервалом L ряд из n считывающих устройств, на выходе каждого из которых формируется соответствующий сигнал, пропорциональный уровню намагниченности участка брони троса, находящегося у соответствующего считывающего устройства, количество n считывающих устройств в ряду равно количеству упомянутых участков разной степени намагниченности, используемых для представления составных магнитных меток, устанавливают на выходах каждого из n считывающих устройств усилитель, задают коэффициенты передачи усилителей таким образом, чтобы ряд из произведений коэффициентов передачи усилителей и соответствующих им считывающих устройств в ряду с точностью до постоянного множителя соответствовал зеркальному отображению указанной известной последовательности участков разной степени намагниченности участков брони троса, используемой для представления составных магнитных меток, сдвинутому вдоль троса относительно границы упомянутого мерного отрезка на длину Lm, соответствующую длине n упомянутых участков разной степени намагниченности, последовательность которых используется для представления составных магнитных меток, суммируют выходные сигналы усилителей, используют полученную сумму выходных сигналов усилителей в качестве указанной отфильтрованной последовательности, определяют направление V движения троса, принимают решение о положении границы указанного мерного отрезка по моменту выдачи упомянутого сигнала-признака достижения указанной отфильтрованной последовательностью сигналов порогового уровня U0 с использованием информации о длине тактового интервала L, о величине порогового уровня U0 и о направлении V движения каротажного троса. Устройство для осуществления указанного способа включает размещённые вдоль движущегося троса с тактовым интервалом L ряд из n считывающих устройств, выходы которых через соответствующие усилители подключены на соответствующие входы n-входового блока суммирования, выход блока суммирования соединён со вторым входом блока сравнения. Также введены вычислитель и блок определения направления движения троса, первый вход вычислителя подключен к соединенным вместе выходу блока сравнения и первому выходу устройства, второй вход вычислителя подключен к выходу блока определения направления движения троса, третий вход вычислителя подключен к соединённым вместе выходу блока памяти и первому входу блока сравнения, выход вычислителя служит вторым выходом устройства определения границ мерных отрезков. 2 н. и 2 з.п. ф-лы, 5 ил.
| СПОСОБ ПРОМЕРА ГЛУБИНЫ СПУСКА СКВАЖИННОГО ПРИБОРА ПРИ КАРОТАЖНЫХ ИССЛЕДОВАНИЯХ В СКВАЖИНАХ | 1999 |
|
RU2172831C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ КАРОТАЖА | 1987 |
|
SU1487620A1 |
| SU 1160019 A, 07.06.1985 | |||
| Устройство для измерения глубины скважины кабелем с нанесенными на нем корректирующими метками | 1986 |
|
SU1619000A1 |
| СПОСОБ ПРОМЕРА ГЛУБИНЫ СПУСКА СКВАЖИННОГО ПРИБОРА ПРИ КАРОТАЖНЫХ ИССЛЕДОВАНИЯХ В СКВАЖИНАХ | 1999 |
|
RU2172832C2 |
| СПОСОБ ПРОМЕРА ГЛУБИНЫ СПУСКА СКВАЖИННОГО ПРИБОРА ПРИ КАРОТАЖНЫХ ИССЛЕДОВАНИЯХ В СКВАЖИНАХ | 1999 |
|
RU2172830C2 |
| US 5351531 A, 04.10.1994 | |||
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ О НЕСАНКЦИОНИРОВАННОМ ОТКРЫВАНИИ ДВЕРЕЙ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА ИЛИ ОТЦЕПКИ ЕГО ОТ СОСТАВА | 1991 |
|
RU2024061C1 |
| УСТРОЙСТВО для ПОДАЧИ ПАРА | 0 |
|
SU361996A1 |

