Предлагаемое изобретение относится к области геофизических каротажных исследований скважин и может быть использовано для построения устройств промера глубины спуска скважинного прибора при проведении спускоподъемных операций на скважинах.
Известен способ определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах [1], основанный на измерении скорости движения грузонесущего каротажного троса, на конце которого закреплен скважинный прибор и заключающийся в подсчете в единицу времени Т количества оборотов n измерительного ролика с известной длиной окружности l, прижимающегося своей образующей к броне движущегося грузонесущего каротажного троса, в использовании указанных значений Т, n, l для вычисления скорости движения скважинного прибора V.
Известно устройство определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах [1], состоящее из измерительного ролика, своей образующей прижимающегося к броне движущегося грузонесущего каротажного троса, на конце которого закреплен скважинный прибор, счетчика оборотов измерительного ролика, блока измерения временных интервалов, вычислителя, генератора, причем выходы счетчика оборотов измерительного ролика и блока измерения временных интервалов подключены к соответствующим входам блока вычисления, выход которого служит выходом устройства, выход генератора подключен к соединенным вместе тактовым входам счетчика оборотов измерительного ролика, блока измерения временных интервалов и вычислителя.
Известное устройство определения скорости движения скважинного прибора [1] работает следующим образом.
При проведении спускоподъемных операций в скважинах измерительный ролик прижимается своей образующей к броне движущегося грузонесущего каротажного троса, на конце которого закреплен скважинный прибор; вследствие трения движение грузонесущего каротажного троса преобразуется во вращение измерительного ролика, скорость вращения измерительного ролика определяется скоростью V движения грузонесущего каротажного троса; счетчик оборотов измерительного ролика осуществляет подсчет оборотов измерительного ролика n и выдает соответствующие сигналы на вход вычислителя, на другой вход которого с выхода блока измерения временных интервалов подаются сигналы, соответствующие длительностям интервалов времени Т, в течение которых осуществляется подсчет количества оборотов измерительного ролика. В вычислителе указанные значения Т, n, l используются для определения расчетным путем скорости движения скважинного прибора V
Последовательность взаимодействия составных частей известного устройства определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах [1] задается соответствующими выходными сигналами генератора.
Недостатком известных способа и устройства [1] является недостаточная точностью определения скорости движения скважинного прибора, вызванная механическим износом измерительного ролика вследствие трения, загрязнением, например, промывочным буровым раствором, измерительного ролика и брони грузонесущего каротажного троса.
Наиболее близким к заявляемому способу определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах (прототипом) является способ измерения колебаний скорости движения магнитной ленты [2], заключающийся в предварительной разметке магнитной ленты путем нанесения по ее длине магнитных меток, представляющих собой последовательность участков разной степени намагниченности, в размещении вдоль движущейся магнитной ленты двух считывающих устройств, считывающих магнитные метки и превращающих их в соответствующие сигналы, в определении функции корреляции В(τ) выходных сигналов указанных считывающих устройств, в определении мощности Р выходного сигнала одного из считывающих устройств и оценивании искомого колебания скорости движения магнитной ленты V(t) по величине переменной составляющей коэффициента корреляции r(τ) выходных сигналов указанных считывающих устройств, соответствующему отношению указанных функций корреляции В(τ) и мощности Р.
Наиболее близким к заявляемому устройству определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах (прототипом) является устройство измерения колебаний скорости движения магнитной ленты [3], содержащее размещенные вдоль движущейся магнитной ленты два считывающих устройства, считывающих магнитные метки и превращающих их в соответствующие сигналы, блок определения функции коррреляции В(τ), блок определения мощности Р, последовательно соединенные блок вычисления коэффициента корреляции r(τ), блок обработки и блок регистрации, выход которого является выходом устройства, причем блок определения функции корреляции В(τ) состоит из последовательно соединенных перемножителя и первого интегратора, выход последнего служит выходом блока определения функции корреляции В(τ) и подключен к первому входу блока вычисления коэффициента корреляции r(τ), первый и второй выходы перемножителя служат первым и вторым входами блока определения функции корреляции B(τ) и подключены к выходам соответствующих считывающих устройств, блок определения мощности Р состоит из последовательно соединенных квадратора и второго интегратора, выход последнего служит выходом блока определения мощности Р и соединен со вторым входом блока вычисления коэффициента корреляции r(τ), а вход квадратора служит входом блока определения мощности Р и подключен к выходу одного из считывающих устройств.
Работа известного устройства измерения колебания скорости движения магнитной ленты [3] заключается в последовательной реализации следующих операций [2]:
1. Предварительно размечают магнитную ленту путем нанесения по ее длине магнитных меток, представляющих собой последовательность участков разной степени намагниченности. При этом в качестве магнитных меток могут использоваться либо специально наносимые последовательности разной степени намагниченности, либо в качестве таковых меток используются неоднородности намагниченности ленты, присущие самой ленте и вызванные, например, остаточной намагниченностью ленты или неравномерным нанесением на нее магнитного слоя. Такие магнитные неоднородности ленты в [2] называют "шумами".
2. Размещают вдоль движущейся магнитной ленты два считывающих устройства, считывающих магнитные метки и превращающих их в соответствующие сигналы. При движении магнитной ленты со скоростью V(t) вдоль считывающих устройств магнитные метки, указанные в п.1, последовательно считываются упомянутыми считывающими устройствами; при этом выходные сигналы U1(t) и U2(t) соответствующих считывающих устройств повторяют друг друга со сдвигом во времени на величину τ:
U2(t)=U1(t+τ), (2)
где 
ΔL - расстояние между упомянутыми считывающими устройствами.
3. Определяют значение функции корреляции В(τ) выходных сигналов U1(t) и U2(t) указанных считывающих устройств. Данная операция выполняется в блоке определения функции корреляции В(τ), на входы которого с выходов соответствующих считывающих устройств поступают сигналы U1(t) и U2(t); так как предполагается, что сигналы U1(t) и U2(t) не содержат постоянной составляющей, то оценка значения функции корреляции В(τ) определяется из соотношения
B(τ) = ∫U1(t)U2(t)dt = ∫U1(t)U1(t+τ)dt. (4)
4. Определяют значение мощности Р выходного сигнала одного из считывающих устройств. Данная операция выполняется в блоке определения мощности Р из соотношения
P = ∫[U1(t)]2dt, (5)
если блок определения мощности Р подключен к выходу первого считывающего устройства, или из соотношения
P = ∫[U2(t)]2dt = ∫[U1(t+τ)]2dt, (6)
если блок определения мощности Р подключен к выходу второго считывающего устройства. Определение мощности P по соотношениям (5) и (6) должно приводить к одному результату, поскольку предполагается, что на выходах обоих считывающих устройств воспроизводятся две копии одного сигнала, сдвинутые относительно друг друга на временной интервал τ.
5. Определяют коэффициента корреляции r(τ) выходных сигналов указанных считывающих устройств из соотношения
Данная операция осуществляется в блоке вычисления коэффициента корреляции r(τ) с использованием полученных в п.3 и п.4 значений В(τ) и Р.
6. Оценивают искомые колебания скорости движения магнитной ленты V(t) по величине переменной составляющей коэффициента корреляции r(τ), определенному в п.5. Данная операция осуществляется в блоке обработки.
7. Полученную в п.6 оценку колебаний скорости движения магнитной ленты выдают на выход устройства измерения в любом пригодном для дальнейшего использования виде, например, на индикацию. Данная операция выполняется блоком регистрации.
Недостатком известных решений способа [2] и устройства [3] измерения колебаний скорости движения магнитной ленты являются ограниченные функциональные возможности, выражающиеся в применимости этих решений только для оценки колебаний скорости движения магнитной ленты и невозможности определения направления и величины самой скорости движения магнитной ленты  .
.
Целью заявляемых способа и устройства определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах является определение направления и величины скорости движения скважинного прибора  .
.
Поставленная цель достигается тем, что в заявляемом способе определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах, основанном на измерении скорости движения грузонесущего каротажного троса, на конце которого закреплен скважинный прибор и заключающемся в предварительной магнитной разметке брони грузонесущего каротажного троса путем нанесения по его длине магнитных меток, представляющих собой последовательность участков разной степени намагниченности, в размещении вдоль движущегося грузонесущего каротажного троса двух считывающих устройств, считывающих магнитные метки и превращающих их в соответствующие сигналы U1(t) и U2(t), в определении функции корреляции B(τ) сигналов, фиксируют расстояние ΔL между считывающими устройствами, запоминают длину указанного расстояния ΔL в виде соответствующего сигнала, определяют сигнал Y(t), ортогональный выходному сигналу одного из считывающих устройств, задерживают во времени сигнал Y(t), ортогональный выходному сигналу одного из считывающих устройств, и выходной сигнал другого считывающего устройства, на длительность τ1 и τ2 соответственно, определяют функцию корреляции В(τ) указанных задержанных сигналов, устанавливают длительности задержек τ1 и τ2 таким образом, чтобы полученное значение указанной функции корреляции В(τ) этих задержанных сигналов равнялось нулю, используют значения расстояния ΔL между считывающими устройствами и длительностей задержек τ1, τ2 для определения скорости  движения скважинного прибора. При этом в устройстве определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах, содержащем два считывающих устройства, расположенных вдоль движущегося грузонесущего каротажного троса, на конце которого закреплен скважинный прибор, блок определения функции корреляции B(τ), блок обработки и блок регистрации, дополнительно введены блок вычисления ортогонального сигнала Y(t), два блока задержки, блок управления, вычислитель, блок памяти.
движения скважинного прибора. При этом в устройстве определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах, содержащем два считывающих устройства, расположенных вдоль движущегося грузонесущего каротажного троса, на конце которого закреплен скважинный прибор, блок определения функции корреляции B(τ), блок обработки и блок регистрации, дополнительно введены блок вычисления ортогонального сигнала Y(t), два блока задержки, блок управления, вычислитель, блок памяти.
Предлагаемое изобретение поясняется примером конкретного выполнения (см. чертеж) устройства определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах, которое содержит первое 2 и второе 3 считывающие устройства, расположенные вдоль движущегося грузонесущего каротажного троса 1, на конце которого закреплен скважинный прибор (не показан), блок определения функции корреляции В(τ) 4, блок обработки 5 и блок регистрации 6, блок определения ортогонального сигнала Y(t) 7, первый 8 и второй 9 блоки задержки, блок управления 10, вычислитель 11, блок памяти 12. Причем выход первого считывающего устройства 2 подключен к входу блока вычисления ортогонального сигнала Y(t) 7, выход которого соединен с информационным входом первого блока задержки 8, выход второго считывающего устройства 3 подключен к информационному входу второго блока задержки 9, первые выходы первого 8 и второго 9 блоков задержки подключены к первому и второму входам блока определения функции корреляции В(τ) 4 соответственно, выход блока определения функции корреляции В(τ) 4 подключен ко входу блока обработки 5, выход которого соединен с входом блока управления 13, выход последнего подключен к соединенным вместе управляющим входам первого 8 и второго 9 блоков задержки, второй выход первого блока задержки 8 и второй выход второго блока задержки 9 подключены к первому и второму входам вычислителя 11 соответственно, третий вход вычислителя 11 соединен с выходом блока памяти 12, выход вычислителя 11 подключен ко входу блока регистрации 6, выход последнего служит выходом устройства.
Работа заявляемого устройства определения скорости движения скважинного прибора при спускоподъемных операциях в скважинах заключается в последовательной реализации следующих операций.
1. Предварительно осуществляют магнитную разметку брони грузонесущего каротажного троса путем нанесения по его длине магнитных меток, представляющих собой последовательность участков разной степени намагниченности, закрепляют на конце троса скважинный прибор. При этом в качестве магнитных меток могут использоваться либо специально наносимые последовательности разной степени намагниченности брони троса, либо в качестве таковых меток могут использоваться неоднородности намагниченности брони грузонесущего троса, возникающие из-за воздействия на броню троса внешних электромагнитных полей разной природы или вызванные, например, остаточной намагниченностью брони троса, возникающей в процессе его производства.
2. При спускоподъемных операциях в скважинах размещают вдоль движущегося грузонесущего каротажного троса на фиксированном расстоянии ΔL друг от друга два считывающих устройств, считывающих магнитные метки и превращающих их в соответствующие сигналы U1(t) и U2(t), запоминают длину указанного расстояния ΔL в виде соответствующего сигнала. Сигнал, соответствующий длине указанного расстояния ΔL между считывающими устройствами, записывают и хранят в блоке памяти 12. При движении грузонесущего каротажного троса 1 со скоростью  вдоль считывающих устройств 2 и 3 магнитные метки, указанные в п.1, последовательно считываются упомянутыми считывающими устройствами; при этом выходные сигналы U1(t) и U2(t) соответствующих считывающих устройств повторяют друг друга со сдвигом во времени на величину τ, равную отношению указанных фиксированного расстояния ΔL скорости троса
вдоль считывающих устройств 2 и 3 магнитные метки, указанные в п.1, последовательно считываются упомянутыми считывающими устройствами; при этом выходные сигналы U1(t) и U2(t) соответствующих считывающих устройств повторяют друг друга со сдвигом во времени на величину τ, равную отношению указанных фиксированного расстояния ΔL скорости троса  ; согласно (3) U2(t)= U1(t+τ).
; согласно (3) U2(t)= U1(t+τ).
3. Определяют сигнал Y(t), ортогональный выходному сигналу одного из считывающих устройств. Данная операция выполняется посредством блока вычисления ортогонального сигнала Y(t) 7. В приведенном на чертеже примере конкретного выполнения заявляемого устройства определяется сигнал Y(t), ортогональный выходному сигналу U1(t) первого считывающего устройства 2. В блоке вычисления ортогонального сигнала Y(t) 7 осуществляется вычисление преобразования Гильберта [4] выходного сигнала U1(t) первого считывающего устройства 2; в результате на выходе блока вычисления ортогонального сигнала Y(t) 7 формируется сигнал Y(t), описываемый выражением
4. Задерживают во времени указанный сигнала Y(t), ортогональный выходному сигналу одного из считывающих устройств, и выходной сигнал другого считывающего устройства на длительность τ1 и τ2 соответственно. В приведенном на чертеже примере конкретного выполнения заявляемого устройства данные операции выполняются соответственно первым 8 и вторым 9 блоками задержки.
5. Определяют функцию корреляции В(τ) задержанных во времени указанного сигнала Y(t), ортогонального выходному сигналу одного из считывающих устройств, и выходного сигнала другого считывающего устройства. Данная операция осуществляется посредством блока определения функции корреляции В(τ) 4, на входы которого с первых выходов первого 8 и второго 9 блоков задержки поступают задержанные сигналы Y(t+τ1) и U2(t+τ2). На выходе блока определения функции корреляции B(τ) 4 формируется сигнал, описываемый выражением
6. Выбирают длительности задержек указанного сигнала Y(t), ортогонального выходному сигналу одного из считывающих устройств, и выходного сигнала другого считывающего устройства τ1 и τ2 соответственно таким образом, чтобы полученное значение полученной в п.5 функции корреляции В(τ) равнялось нулю. Данные операции выполняются посредством блока обработки 5, блока управления 10, первого 8 и второго 9 блоков задержки. На вход блока обработки 5 подается сигнал, соответствующий функции корреляции В(τ), определенный в п.5 согласно правила (9), на выходе блока обработки 5 формируются
соответствующий сигнал, по которому сигналом с выхода блока управления 10, подаваемым на управляющие входы первого 8 и второго 9 блоков задержки, длительности задержек сигналов в указанных блоках устанавливаются таким образом, чтобы они удовлетворяли условию
τ1 = τ+τ2. (10)
Вследствие задания длительностей задержек τ1 и τ2 сигналов в указанных первом 8 и втором 9 блоках задержки, удовлетворяющих условию (10), осуществляется компенсация взаимной задержки τ выходных сигналов U1(t) и U2(t)= U1(t+τ) соответственно первого 2 и второго 3 считывающих устройств, вызванной движением грузонесущего каротажного троса вдоль упомянутых считывающих устройств и последовательным считыванием первым 2 и вторым 3 считывающими устройствами указанных в п.1 магнитных меток, нанесенных на броню троса. В результате на первых выходах первого 8 и второго 9 считывающих устройств формируются сигналы, которые описываются выражениями
Y(t+τ1) = Y(t+τ+τ2), (11)
U2(t+τ2) = U1(t+τ+τ2). (12)
Эти сигналы поступают соответственно на первый и второй входы блока определения функции корреляции В(τ) 4. Вследствие ортогональности сигналов Y(t+τ+τ2) и U1(t+τ+τ2) выходной сигнал блока определения функции корреляции В(τ) 4 равен нулю:
При движении магнитной ленты со скоростью V(t) вдоль считывающих устройств магнитные метки, указанные в п.1, последовательно считываются упомянутыми считывающими устройствам.
7. Используют значения указанных расстояния ΔL между считывающими устройствами и длительностей задержек τ1, τ2, полученных в п.6 для определения скорости движения грузонесущего каротажного троса и скорости скважинного прибора  . Данная операция выполняется посредством вычислителя 11, на первый и второй входы которого со вторых выходов первого 8 и второго 9 блоков задержки поступает информация о величине задержки сигналов в первом 8 и втором 9 блоках задержки τ1 и τ2 соответственно. На третий вход вычислителя 11 из блока памяти 12 подается сигнал, соответствующий указанному расстоянию ΔL между считывающими устройствами 2 и 3. В вычислителе 11 вычисляется, например, программным способом направление и величина скорости движения грузонесущего каротажного троса
. Данная операция выполняется посредством вычислителя 11, на первый и второй входы которого со вторых выходов первого 8 и второго 9 блоков задержки поступает информация о величине задержки сигналов в первом 8 и втором 9 блоках задержки τ1 и τ2 соответственно. На третий вход вычислителя 11 из блока памяти 12 подается сигнал, соответствующий указанному расстоянию ΔL между считывающими устройствами 2 и 3. В вычислителе 11 вычисляется, например, программным способом направление и величина скорости движения грузонесущего каротажного троса  из соотношения
из соотношения
Как уже указывалось, скорость движения грузонесущего каротажного троса  соответствует скорости движения скважинного прибора, закрепленного на конце этого троса, то полученное в вычислителе 11 значение скорости движения скважинного прибора
соответствует скорости движения скважинного прибора, закрепленного на конце этого троса, то полученное в вычислителе 11 значение скорости движения скважинного прибора  через блок регистрации 6 выдается на выход устройства в любой удобной для дальнейшего использования форме, например отображается на цифровом индикаторе или регистрируется на бумажном или ином носителе.
через блок регистрации 6 выдается на выход устройства в любой удобной для дальнейшего использования форме, например отображается на цифровом индикаторе или регистрируется на бумажном или ином носителе.
Таким образом, автор претендует на следующие отличительные признаки.
1. Размещают вдоль движущегося грузонесущего каротажного троса на фиксированном расстоянии ΔL два специальных считывающих устройства, считывающих магнитные метки и превращающих их в соответствующие сигналы U1(t) и U2(t), запоминают длину указанного расстояния ΔL в виде соответствующего сигнала. Этим признаком создается мерная база длиной ΔL, изменение глубины пуска скважинного прибора на величину ΔL за некоторый промежуток времени и позволяет определять направление и величину скорости его движения  .
.
2. Определяют сигнал Y(t), ортогональный выходному сигналу одного из считывающих устройств. Данный признак создает предпосылки для определения интервала времени между моментами последовательного считывания магнитных меток считывающими устройствами при движении вдоль них грузонесущего каротажного троса.
3. Задерживают во времени указанный сигнала Y(t), ортогональный выходному сигналу одного из считывающих устройств, и выходной сигнал другого считывающего устройства на длительность τ1 и τ2 соответственно, используют задержанные сигналы для определения их функции корреляции В(τ). Данный признак создает предпосылки для определения интервала времени между моментами последовательного считывания магнитных меток считывающими устройствами при движении вдоль них грузонесущего каротажного троса.
4. Выбирают длительности задержек указанного сигнала Y(t), ортогонального выходному сигналу одного из считывающих устройств, и выходного сигнала другого считывающего устройства τ1 и τ2 соответственно таким образом, чтобы полученное значение полученной в функции корреляции В(τ) равнялось нулю. Данный признак позволяет определить последовательность прохождения одних и тех же магнитных меток, нанесенных на броню каротажного троса, мимо считывающих устройств и определить длительность промежутка времени τ между последовательным прохождением этих магнитных меток мимо считывающих устройств. Таким образом создаются предпосылки для определения скорости движения скважинного прибора и по величине, и по направлению.
Анализ показывает, что заявляемое техническое решение обладает существенными отличиями и соответствует критерию новизны.
Блоки, входящие в состав заявляемого устройства определения скорости движения скважинного прибора, известны из техники.
В качестве первого 2 и второго 3 считывающих устройств, блока определения функции корреляции В(τ) 4, блока обработки 5 и блока регистрации 6 могут быть применены соответствующие блоки из устройства-прототипа [3].
Первый 8 и второй 9 блоки вычисления среднеквадратического отклонения, блок умножения 12 и вычислитель 14 могут быть выполнены, например, программным способом или в виде функциональных преобразователей; примеры выполнения соответствующих функциональных преобразователей приведены в [5].
Блок управления 10 может быть выполнен в виде распределителя импульсов, вычислитель 11 может быть выполнен, например, программным способом или в виде функционального преобразователя, а блок памяти 12 - в виде постоянного запоминающего устройства (ПЗУ); примеры реализации распределителей импульсов вычислителей и ПЗУ приведены в [5].
Первый 10 и второй 11 блоки задержки могут быть реализованы на оперативных запоминающих устройствах с произвольной выборкой по схеме регистров сдвига переменной длины; примеры построения таких регистров приведены в [5].
Источники информации
1. Заворотько Ю. М. Геофизические методы исследования скважин. Учебник для техникумов. М.: Недра, 1983.
2. А.с. СССР 505960 / Способ измерения колебаний скорости движения магнитной ленты / авт. А.Д. Зедгинидзе.
3. А.с. СССР 498551 / Устройство для измерения колебаний скорости движения магнитной ленты / авт. А.Д. Зедгинидзе.
4. Теория электрической связи: Учебник для вузов / А.Г. Зюко, Д.Д. Кловский, В. И. Коржик, М.В. Назаров; Под ред. Д. Д. Кловского. - М.: Радио и связь, 1998.
5. Титце У. , Шенк К. Полупроводниковая схемотехника. Справочное руководство. /Пер. с нем. - М.: Мир, 1982, с. 512.
Изобретение относится к исследованию скважин и может быть использовано для определения скорости проведения спускоподъемных операций. Задача изобретения - расширение функциональных возможностей, повышение точности. Способ основан на измерении скорости движения грузонесущего каротажного троса (ГКТ), на конце которого закреплен скважинный прибор. На броню ГКТ наносят магнитные метки, представляющие собой последовательность участков разной степени намагниченности. Размещают вдоль движущегося ГКТ два считывающих устройства (СУ), считывающих магнитные метки и превращающих их в соответствующие сигналы, фиксируют расстояние между СУ и запоминают его в виде сигнала. Определяют сигнал, ортогональный выходному сигналу одного из СУ, и задерживают во времени его и выходной сигнал другого СУ. Определяют функцию корреляции задержанных сигналов. Длительности задержек устанавливают таким образом, чтобы значение функции корреляции задержанных сигналов равнялось нулю. Значения расстояния между СУ и длительностей задержек используют для определения скорости движения скважинного прибора. Устройство содержит, кроме СУ, блок вычисления ортогонального сигнала, два блока задержки, блок управления, последовательно соединенные блок определения функции корреляции и блок обработки и последовательно соединенные блок памяти, вычислитель и блок регистрации. Выход последнего является выходом устройства. 2 с.п. ф-лы, 1 ил.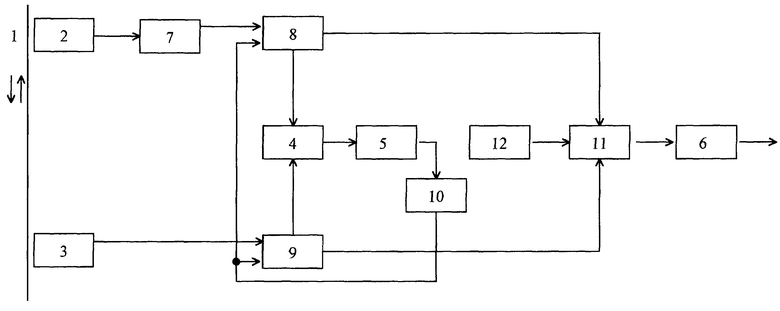
 движения скважинного прибора.
движения скважинного прибора.
| Способ измерения колебаний скорости движения магнитной ленты | 1974 |
|
SU505960A1 |
| Устройство для измерения колебаний скорости движения магнитной ленты | 1974 |
|
SU498551A1 |
| US 4852263 A, 01.08.1989 | |||
| Каротажный подъемник | 1987 |
|
SU1506095A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ, СКОРОСТИ ПЕРЕМЕЩЕНИЯ И НАТЯЖЕНИЯ КАБЕЛЯ | 1992 |
|
RU2041351C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И РЕГЕНЕРАЦИИ МАГНИТНЫХ МЕТОК ГЛУБИНЫ | 1991 |
|
RU2013536C1 |
| ЗАВОРОДЬКО Ф.М | |||
| Геофизические методы исследования скважин | |||
| - М.: Недра, 1983, с.26-29. | |||

