Изобретение относится к области автомобилестроения.
Известен пульт управления транспортным средством (ТС), содержащий рулевую колонку в качестве органа управления и педали управления оборотами двигателя, тормозами и сцеплением. Подобный пульт управления имеет например а/м ВАЗ-2104 («Руководство по эксплуатации, техническому ремонту и обслуживанию», М., издательство «Третий Рим», 1999 г.). Аналогичная схема управления применена также в пульте управления (ПУ) шведской фирмы «АКТИЕБОЛАГЕТ СВЕНСКА КУЛЛАГЕРФАБРИКЕН», патент СССР №646891, в котором редуктор рулевого управления соединен с золотниковым механизмом гидроусилителя руля посредством гибкого вала, передающего направление вращения, но не передающего усилия. Недостатком их является наличие рулевого колеса, а также нескольких педалей, что ведет к потере времени при пользовании ими в чрезвычайных ситуациях.
Известен также ПУ ТС, имеющий в качестве органа управления рукоятку - «сайдстик» для изменения направления движения, оборотов двигателя и управления тормозами. Такой пульт управления имеет а/м «МЕРСЕДЕС-БЕНЦ-SL500» (см. журнал «За рулем» №4, 2000 г., с.52-54). Этот ПУ является наиболее близким аналогом предлагаемому устройству. Недостатком его является отсутствие механической связи между органами управления и исполнительными механизмами, которая (связь) имитируется бортовым компьютером посредством сервоприводов.
Целью изобретения является уменьшение усилий по управлению а/м с сохранением достаточной обратной связи между исполнительными механизмами и водителем.
Поставленная цель достигается применением бесступенчатого редуктора, в котором ведущий и ведомые валы выполнены в виде противоположных конусов, имеющих возможность вращения и осевого перемещения при воздействии связанных с ними органов управления, соединенных также с приводами тормозов и оборотов двигателя и взаимодействие между которыми осуществляется посредством передаточных колесиков, двигающихся вдоль линии взаимодействия конусов под воздействием привода управления и изменяющих передаточное число редуктора.
На фиг.1 изображена принципиальная схема бесступенчатого редуктора рулевого управления (далее БР) с изменяемым передаточным числом.
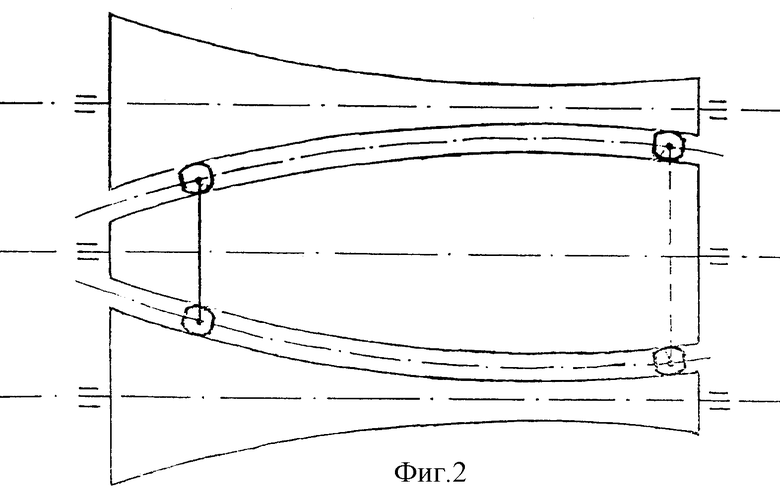
На фиг.2 - схема БР с изменяемым в нелинейной пропорции передаточным числом.
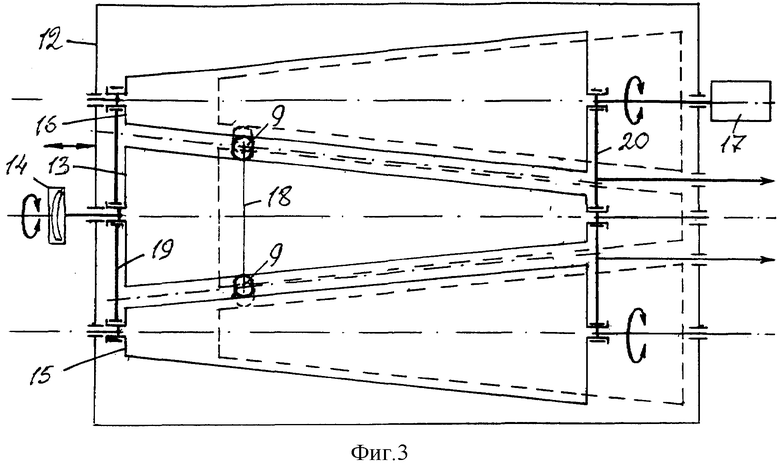
На фиг.3 - схема механического привода БР.
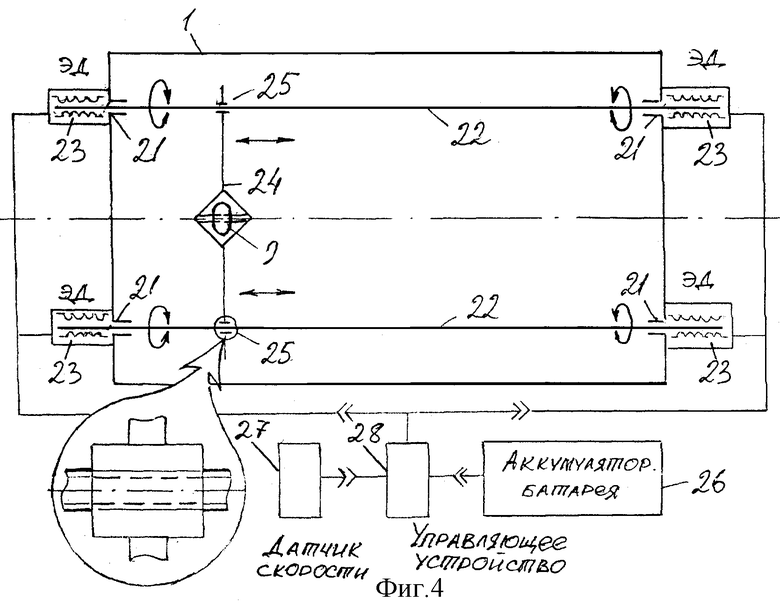
На фиг.4 - схема электрического привода БР (для упрощения валы не показаны).
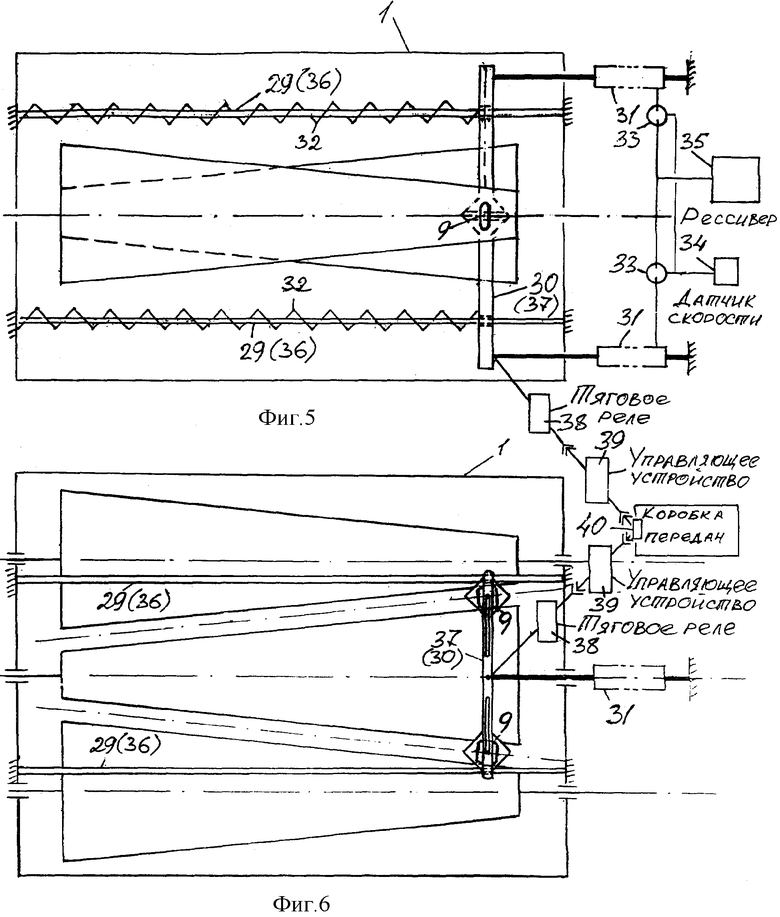
На фиг.5 - схема пневматического или электромагнитного привода, вид сбоку.
На фиг.6 - то же, вид сверху.
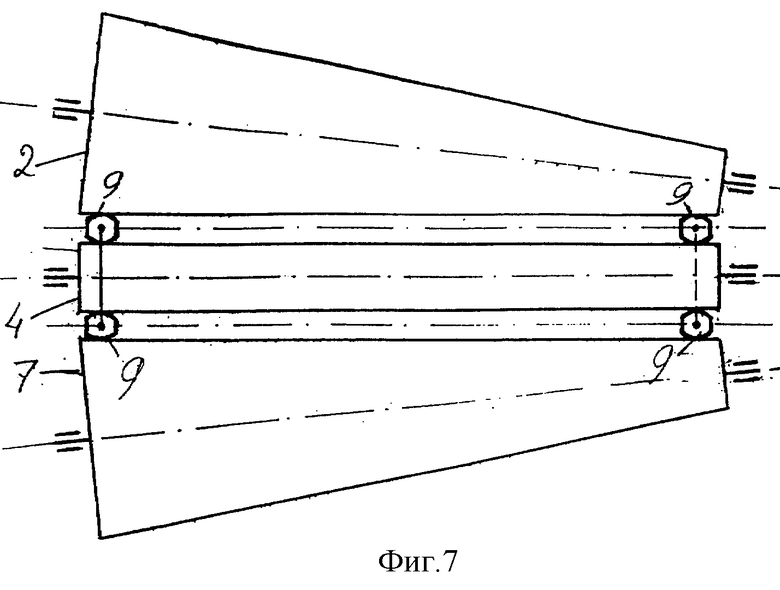
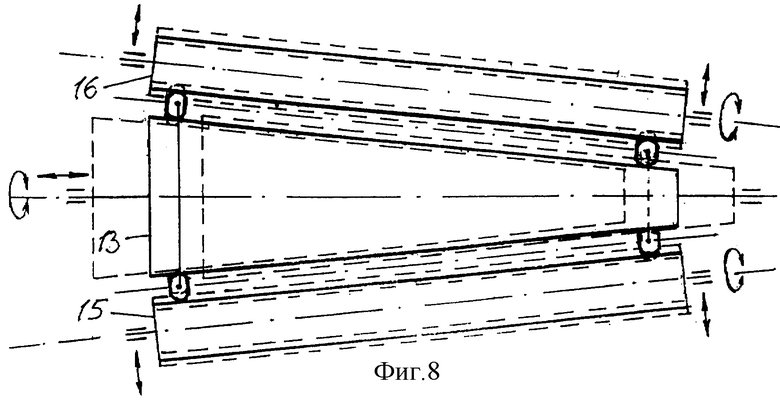
На фиг.7 и 8 - варианты исполнения валов редуктора.
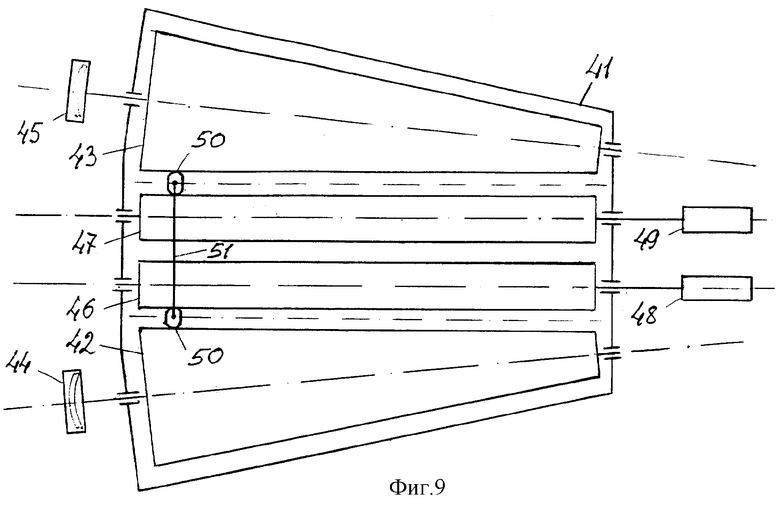
На фиг.9 - схема БР полноуправляемого автомобиля.
ПУЛЬТ УПРАВЛЕНИЯ ТС с изменяемым передаточным числом содержит (фиг.1) корпус 1, в котором с возможностью вращения и осевого перемещения установлены ведущий вал 2, выполненный в виде конуса и жестко соединенный с рукояткой 3, ведомый вал 4, выполненный в виде конуса и соединенный с золотниковым механизмом 5 гидроусилителя руля (далее - ГУР) через стабилизирующее устройство 6, компенсирующий вал 7, выполненный в виде конуса, подобно валу 2, и соединенный с рукояткой 8, передаточные колесики 9, установленные в вертикальных тягах 10, соединенных тягой 11 с приводом управления (фиг.5, 6). Привод управления может быть механическим, электрическим, пневматическим и электромагнитным.
ПУ с одной рукояткой содержит (фиг.3) корпус 12, ведущий вал 13, соединенный с рукояткой 14, ведомые валы 15, 16, соединенные с ГУР передней и задней оси 17, тяга 18 с приводом управления.
Механический привод содержит рукоятку 14, тягу 19, соединяющую валы 13, 15, 16 и тягу 20 привода управления тормозами и оборотами двигателя (фиг.3).
Электрический привод содержит корпус 1 с посадочными местами подшипников 21, в которых вращаются ходовые валы 22, соединенные с роторами электродвигателей 23, установленных в корпусе 1, тягу 24 с резьбовыми узлами 25, электрическую цепь управления, состоящую из аккумуляторной батареи 26, датчика скорости 27 и управляющего устройства 28 (фиг.4).
Пневматический привод содержит корпус 1, в котором жестко закреплены направляющие 29, тягу 30, соединенную со штоками пневматических цилиндров 31, возвратную пружину 32, пневмоклапан 33, датчик скорости 34, рессивер 35 (фиг.5, 6).
Электромагнитный привод содержит корпус 1, в котором жестко закреплены направляющие 36, тягу 37, тяговое реле 38 с возможностью фиксации положения, управляющее устройство 39, датчик 40 ступени или положения рычага коробки передач (фиг.5, 6).
Пульт управления полноуправляемым автомобилем может быть оборудован дополнительно вторым органом управления, работающим независимо от первого (фиг.9). В этом случае он содержит общий корпус 41, ведущие валы 42, 43 с рукоятками 44, 45, ведомые валы 46, 47, связанные с ГУРами 48, 49 передней и задней оси, колесики 50, соединенные общей тягой 51 привода.
Пульт управления работает следующим образом. Поворотом рукоятки 3 на некоторый угол приводится во вращение ведущий вал 2 и через колесики 9 ведомый вал 4, который перемещает золотник ГУР 5. Одновременно приводится во вращение компенсирующий вал 7, уравновешивающий усилие на валу 2 при любом положении колесиков 9. ПУ может иметь орган управления в виде двух рукояток, при этом компенсирующий вал 7 соединен со второй рукояткой 8, а ведущий и компенсирующий валы взаимозаменяемы и взаимодополняемы (фиг.1). При перемещении колесиков 9 вдоль линии взаимодействия валов из одного крайнего положения в другое происходит изменение передаточного числа редуктора. Для стабилизации валов 2, 4, 7, золотника ГУРа и органов управления в среднем положении служит стабилизирующее устройство 6. Перемещение колесиков 9 производится посредством тяг 10, 11 привода управления.
Электрический привод работает следующим образом.
При изменении скорости движения датчик 27 посылает сигнал на управляющее устройство 28, которое управляет работой электродвигателей 23, вращающих ходовые валы 22 в ту или иную сторону. По валам посредством резьбовых узлов 25 перемещаются тяги 24 с колесиками 9 (фиг.4).
Пневматический привод работает подобным образом, с той разницей, что перемещение тяги 30 по направляющим 29 происходит под воздействием штоков пневмоцилиндров 31 и возвратных пружин 32. Работой пневмоцилиндров управляют пневмоклапаны 33 согласно информации, поступающей от датчика скорости 34 (фиг.5, 6).
Электромагнитный и механический приводы работают совместно. Тяговое реле 38 по сигналу датчика 40 изменяет положение колесиков 9 при переключении передач, а осевое перемещение валов 13, 15, 16 осуществляется механическим воздействием органа управления 14 через тягу 19 и связанного также тягой 20 с приводами дроссельной заслонки двигателя и тормозов при фиксированном положении колесиков 9, что в обоих случаях приводит к изменению передаточного числа (фиг.3, 5, 6).
ПУ полноуправляемого автомобиля с двумя независимыми органами управления работает согласно вышеописанной схеме с той лишь разницей, что отсутствуют компенсирующие валы. Передаточные колесики 50 соединены общей тягой 51 привода управления, но ведомые валы 46, 47 не связаны друг с другом, что позволяет управлять поворотом колес обеих осей независимо друг от друга (фиг.9).
Тяга 11 дает возможность поперечного перемещения тяги 10 и колесиков 9 в соответствии с траекторией перемещения.
Возможен вариант изготовления редуктора, ведомый вал которого выполнен в виде цилиндра (фиг.7). При этом упрощается привод управления. Другой частный случай изображен на фиг.8 - ведущие валы выполнены в виде цилиндров, уменьшаются линейные размеры БР. Для поддержания необходимого режима работы механического привода валы 4 должны иметь возможность перемещения в поперечно-осевом направлении.
Для осуществления непропорционального изменения передаточного числа используется редуктор с нелинейными характеристиками. Поверхности валов выполняются криволинейными с параллельными линиями взаимодействия (фиг.2).
Передача крутящего момента между элементами 2, 4, 7 и 9 осуществляется посредством тангенциальных сил трения, поэтому валы 2, 4, 7 изготавливаются из фрикционного материала с нанесением на их поверхности продольных рисок, а колесики 9 могут изготавливаться из резины.
При использовании БР с электрическим или пневматическим приводом рукоятки 3, 8 управляют только направлением движения, а управление дроссельной заслонкой и тормозами осуществляется традиционным способом.
Достоинство предлагаемого ПУЛЬТА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ заключается в отсутствии рулевого колеса, повышении чувствительности рулевого управления с сохранением безопасности при движении с высокими скоростями, уменьшении усилий по управлению автомобилем и сокращении времени, необходимого для перевода а/м из фазы активного движения в фазу торможения. Применение независимой схемы поворота задних колес повышает маневренность а/м.
Изобретение относится к области автомобилестроения. Пульт управления транспортным средством содержит орган управления, бесступенчатый редуктор и золотниковый механизм гидроусилителя руля. В корпусе бесступенчатого редуктора с возможностью вращения установлены ведущий вал, жестко связанный с органом управления, ведомый вал, соединенный с золотниковым механизмом гидроусилителя руля через устройство, стабилизирующее положение валов и органа управления в их среднем положении, и компенсирующий вал, причем, по крайней мере, один из взаимодействующих валов выполнен в виде конуса. Взаимодействие между валами осуществляется посредством колесиков, перемещаемых вдоль линии их взаимодействия посредством тяг привода в зависимости от скорости движения автомобиля, при этом происходит изменение передаточного числа редуктора. Технический результат - уменьшение усилий по управлению автомобилем с сохранением обратной связи между исполнительными механизмами и водителем. 7 з.п. ф-лы, 9 ил.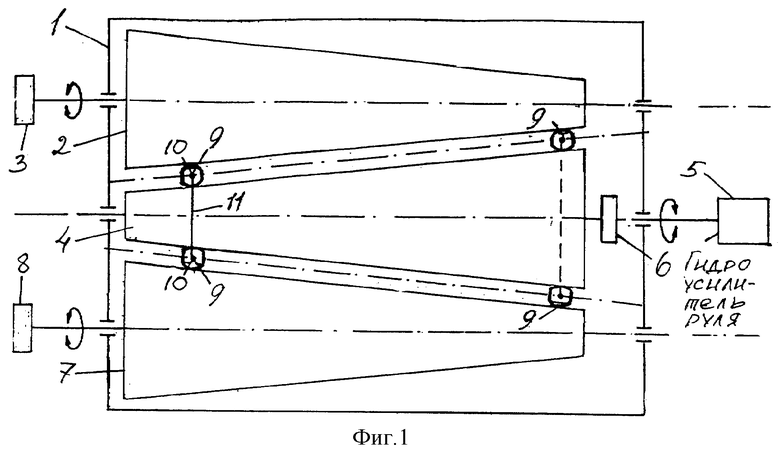
| JP 2002157035 А, 31.05.2002 | |||
| JP 2001206229 А, 31.07.2001 | |||
| Рукоятка системы дистанционного управления рулевым механизмом транспортного средства | 1976 |
|
SU663619A1 |

