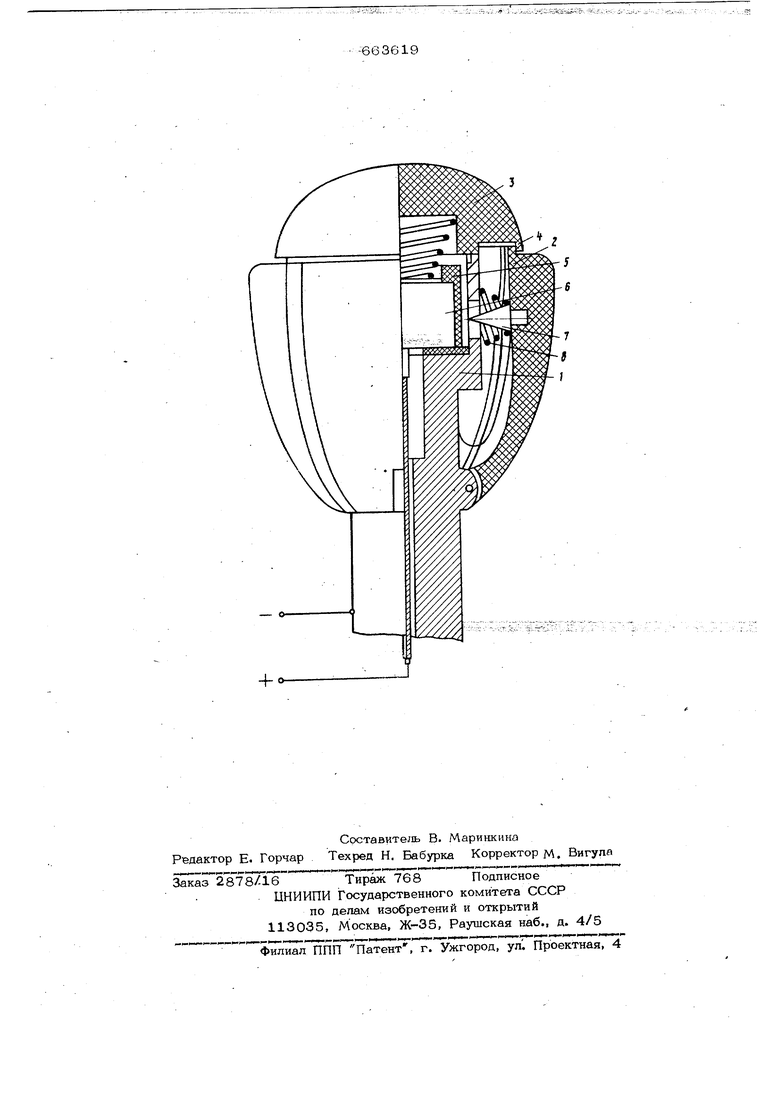
(54) РУКОЯТКА СИСТЕМЫ ДИСТАНЦИОННСГО УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМрМ ТРАНСПОРТНСТО СРЕДСТВА тактом системы управления. Внутрен11яя ; часть рычагов .2 снабжена 4eтaлличecким иглами 7, свйзанньмйГс BTOpbiM контакто системы зшраелёшяГ1йпружйнами с 8, которые поддерживают их в разведенно состоянии. :: У-.;:,:у: V Устройство работает следующим образом. : - -.- - :- При появлении у оператора стрессово. го состояния он либо бросает рукоятки управления, либо у него возникает судо- . рожное сжатие рук и при этом он намертво схватывает головки рукояток. При этом рычаги 2, закрепленные на корпусе управлёния, пёр1емещаютсй к центру корйус и . иглы 7 разрушают стакан 5. Иглы 7, явля ющиеся подвижными контактами коммутирующего устройства, соединяются с сердечником 6, являющимся неподвижным контактом. При этом возникает злектрический импульс который служит сигналом для остановки механизма. Кроме того, с целью предотвращения разрущенйя стака- на 5, в результате случайного механического воздействия на .рукоятку, ПреДусмот,рена возможность перемещения элемента 5 и сердечника 6 в полости корпуса в .том случае, если это воздействие будет приложено с.одной стороны. В этом случае в движение придут одна или две рядом расположённые иглы 7, которые переместят стакан 5 с сердечником 6 в свободное Пространство между иглами и внутренней поверхностью корпуса. Таким образом, только при одновременном перемещении двух и более диаметра льно противоположных игл 7, что соответствует полному охвату головки рукоятки ладонью оператора, может произойти разрушение .стакана 5, влекущее за собой остановку машины. Применение изобретения дает возможность устранить неизбежные-аварии механизмов с дистанционным управлением в тех случаях, когда оператор находится в стрессовом состоянии. Ф о р м у л а и 3 о б р е т е н и Рукоятка системы дистанционного управления рулевым механизмом транспортного средства,-содержащая корпус с головкой, связанный электроконтактами с системой автоматического управления, 6 тли ч а ю щ а я с я тем, что, с целью предотвращения аварии в ст|эессовом состоянии оператора, головка корпуса снабжена боковыми рычагами, шарнирно присоединенными своими нижними концами к корпусу и имеющими внутри игловые подвижные контакты, и съемной крышкой, охват.ывающей боковые рычаги, в корпусе внутри головки установлен коаксиально рупки и .стаканГ а внутри cTakalia разм е-ен неподвижный контакт. Источники информации, принятые во нимание при экспертизе 1. Монов А. А. Техническое содержаие автоматической сигнализации и автотопов, М., Транспорт, 1974, с. 175.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления автогрейдером | 1981 |
|
SU965863A1 |
| РУЧКА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОБОРОТАМИ И РЕВЕРСОМ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ | 2024 |
|
RU2829019C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| УСТРОЙСТВО ДЛЯ ВЫКЛЮЧЕНИЯ МАССЫ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2013244C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 1998 |
|
RU2177887C2 |
| Электромагнитный замок с актуатором | 2021 |
|
RU2757435C1 |
| Устройство для переноски самоката | 2021 |
|
RU2761005C1 |
| АВТОНОМНАЯ ТЕРМОЗАПОРНАЯ КЛАПАННАЯ СИСТЕМА | 2022 |
|
RU2794019C1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Электромагнитное запирающее устройство с актуатором | 2021 |
|
RU2757431C1 |