Способ управления трансмиссией транспортного средства
Изобретение относится к транспортному машиностроению, а именно к трансмиссиям транспортных средств, и может быть применено преимущественно на двухосных, трехосных и четырехосных транспортных средствах, предназначенных для использования в любых дорожных условиях и вне дорог, а также в условиях, требующих повышенной маневренности. Более детально, настоящее изобретение имеет отношение к методу управления распределением соотношения крутящего момента между колесами транспортного средства.
Американский патент №4987967, являющийся наиболее близким прототипом к изобретению (метод управления четырехколесным транспортным средством), раскрыл агрегат для изменения распределения соотношения крутящего момента. Описанный агрегат распределяет крутящий момент двигателя между передними колесами и задними колесами, в требуемом порядке, через дифференциальный механизм, и содержит два вариатора, передающих крутящий момент соответственно к осям передних и задних колес. Агрегат может изменять скоростное соотношение между передними колесами и задними колесами и регулировать распределение соотношения крутящих моментов. Дифференциальный механизм агрегата поглощает все различия в скоростях вращения, вызванные несовпадением соотношения скоростей. Более того, агрегат включает датчики, обнаруживающие условия движения транспортного средства, и органы управления распределением соотношения крутящего момента в соответствии с обнаруженными условиями движения.
Тем не менее, этот метод не позволяет добиться индивидуального распределения соотношения крутящих моментов между отдельными колесами транспортного средства. Описанный метод не позволяет устранить явление «циркуляции мощности», возникающее в агрегатах и узлах трансмиссии при заблокированных дифференциалах или отсутствии таковых, т.к. в ней невозможно регулировать угловую скорость и подводимый крутящий момент каждого колеса в отдельности.
Такая трансмиссия обеспечивает бесступенчатое регулирование тяги на колесах, однако имеет малый диапазон передаточных чисел и способна передавать относительно небольшой крутящий момент, что затрудняет ее применение на тяжелых транспортных средствах.
Настоящее изобретение было разработано, принимая во внимание предшествующее, для преодоления вышеупомянутых препятствий. Таким образом, объектом изобретения является способ для точного управления распределением соотношения крутящих моментов между всеми колесами транспортного средства.
Достичь точного управления распределением соотношения крутящих моментов по колесам транспортного средства можно с помощью трансмиссионного модуля для управления распределением соотношения крутящих моментов.
Настоящее изобретение направлено на расширение функциональных возможностей управления трансмиссией, снижение нагруженности, повышение КПД, повышение унификации агрегатов и узлов, повышение компактности и снижение трудоемкости управления бесступенчатой трансмиссией транспортного средства.
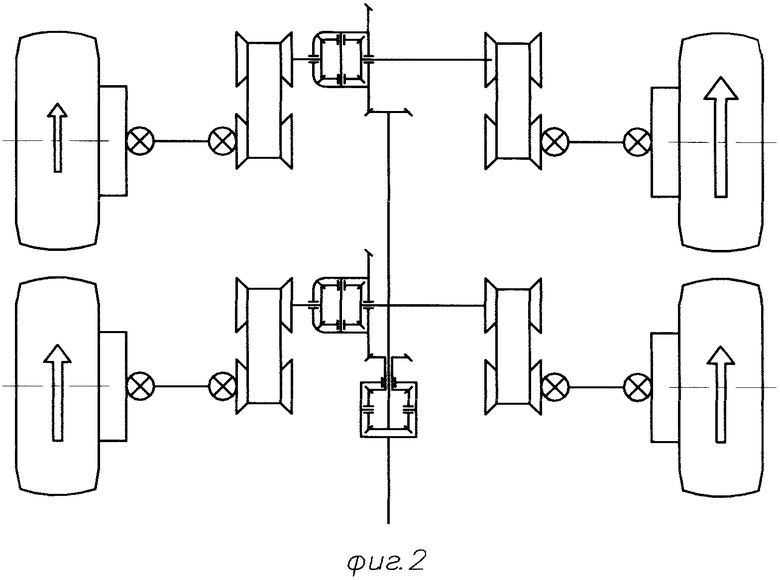
Решение поставленных задач достигается тем, что бесступенчатая трансмиссия транспортного средства (фигура 1) представляет собой совокупность компактных унифицированных модулей. Бесступенчатая трансмиссия транспортного средства состоит из силового агрегата, включающего силовую установку 1 с электронным блоком управления и датчиком частоты вращения 14, и агрегатом, позволяющим разрывать или трансформировать поток мощности 2 (гидротрансформатор или сцепление), раздаточной коробки 3 с дифференциалом или без него (для транспортных средств с числом ведущих осей больше одной), валов, соединяющих агрегаты трансмиссии между собой, межосевых дифференциалов 4 с устройствами их дистанционной блокировки, которых может и не быть, электронного блока управления трансмиссией 11, датчика положения педали подачи топлива 12, датчика измерения угла поворота рулевого колеса 13, переключателя режима движения 19, двух датчиков продольных и поперечных ускорений автомобиля 18, расположенных по краям транспортного средства, и одного или нескольких трансмиссионных модулей, состоящих из центрального проходного редуктора 5 с дифференциалом и устройством для дистанционной блокировки этого дифференциала, двух предохранительных муфт 6, двух вариаторов 7 с металлическими гибкими элементами с устройствами изменения радиуса обкатки ведущих шкивов 21, двух дополнительных редукторов 8, которых может и не быть, двух полуосей 10, двух колесных редукторов 9, которых может и не быть, двух датчиков измерения крутящего момента 17, расположенных между центральным редуктором и движителем, двух датчиков частоты вращения ведущего шкива вариатора 16, расположенных перед ведущим шкивом вариатора, и двух датчиков частоты вращения движителя 15. Крутящий момент от силового агрегата подводится к раздаточной коробке 3, которая распределяет крутящий момент по трансмиссионным модулям. В трансмиссионном модуле крутящий момент подводится к входному валу центрального редуктора. Ведущие элементы предохранительных муфт соединены с каждым из двух выходных валов последнего, а на их ведомых элементах установлены ведущие шкивы вариаторов. Ведомые шкивы вариаторов, в свою очередь, передают крутящий момент через дополнительные редуктора к колесным редукторам посредством полуосей, далее к движителям, благодаря чему в пятне контакта колеса с опорной поверхностью возникают продольные силы, заставляющие транспортное средство двигаться.
Каждый трансмиссионный модуль содержит две предохранительные муфты, необходимые для защиты вариаторов и других агрегатов трансмиссии от перегрузок, которые могут возникнуть при движении транспортного средства (например, при потере одним из колес контакта с грунтом).
При необходимости расширение диапазона изменения крутящего момента может быть достигнуто в результате применения (дополнительной КП, которая может быть объединена с РК) двух- или трехступенчатой РК, у которой с целью уменьшения крутящего момента, проходимого через вариатор, высшие ступени выполнены ускоряющими, а низшая - с передаточным числом, близким к единице. Межосевые и межколесные дифференциалы обеспечивают вращение колес с разными угловыми скоростями независимо от нагрузки на колеса, пути, проходимого каждым из колес, износа протектора, давления воздуха в шинах и т.д. Благодаря применению указанных дифференциалов оказывается возможной оснащение тормозного управления транспортного средства антиблокировочной системой и уменьшается нагрузка на систему управления при движении с незаблокированными дифференциалами.
Регулирование скорости движения транспортного средства и тягового усилия на колесах осуществляется путем синхронного изменения радиуса обкатки шкивов всех вариаторов 7, задаваемого электронным блоком управления 11, обрабатывающим сигнал от датчика положения педали подачи топлива 12, датчиков измерения крутящего момента 17, датчиков скорости вращения двигателя 14 и колес транспортного средства 15, датчиков частоты вращения ведущих шкивов вариаторов 16, датчиков продольных и поперечных ускорений автомобиля 18. Дифференциальный механизм агрегата поглощает все различия в скоростях вращения, вызванные несовпадением соотношения скоростей. При движении в поворотах информация снимается также с датчика измерения угла поворота рулевого колеса 13.
Установка индивидуальных вариаторов вблизи ведущих колес позволяет обеспечить оптимальное распределение крутящего момента по осям и колесам, обеспечивающее наилучшие эксплуатационные свойства, например управляемость, устойчивость, экономичность и т.д., осуществляемые путем коррекции передаточных чисел отдельных вариаторов, которая может производиться как при незаблокированных, так и при заблокированных дифференциалах. Кроме того, при этом уменьшается крутящий момент, передаваемый одним вариатором, при одновременном увеличении крутящего момента, развиваемого силовой установкой, что позволяет применить бесступенчатую клиноременную передачу не только на легких, но и на тяжелых транспортных средствах.
Благодаря достаточно широкому диапазону бесступенчатого регулирования тяги на колесах и соответственно скорости движения транспортного средства появляется возможность обеспечения работы силовой установки на режиме максимальной мощности, режиме минимального расхода топлива и т.д.
Более того, метод для управления распределением соотношения крутящих моментов включает шаг обнаружения и шаг управления. На шаге обнаружения с помощью датчиков производится сбор информации. На шаге управления происходит распределение соотношения крутящих моментов в соответствии с полученной информацией.
Для пояснения принципа регулирования крутящего момента на отдельных колесах или осях при незаблокированных дифференциалах рассмотрим две передние оси многоосного транспортного средства с дифференциальной связью между колесами этих осей. Предположим, что межосевой и межколесные дифференциалы симметричны и характеризуются малым внутренним трением. С целью упрощения последующих рассуждений будем считать, что радиусы качения колес не зависят от подводимого крутящего момента и равны друг другу, а потери в трансмиссионных агрегатах не зависят от режима их работы.
При прямолинейном движении транспортного средства с постоянной скоростью Vтс по ровной опорной поверхности, отсутствии буксования колес и равенстве передаточных чисел всех индивидуальных вариаторов полуосевые шестерни всех межколесных дифференциалов будут вращаться с одинаковыми скоростями

где ωлшk; ωпшk; ωдk - соответственно угловые скорости вращения левой и правой полуосевых шестерен и корпуса дифференциала k-й оси;
uкр - передаточное число колесного редуктора;
uвар - передаточное число вариатора.
Моменты, подводимые к левому и правому колесу первой оси, будут равны

где  - моменты, подводимые к левому и правому колесу и к корпусу дифференциала соответственно;
- моменты, подводимые к левому и правому колесу и к корпусу дифференциала соответственно;
ηкр - коэффициент полезного действия колесного редуктора;
ηвар - коэффициент полезного действия вариатора.
При одновременном увеличении передаточного числа вариатора правого колеса первой оси на величину Δuвар1 и уменьшении передаточного числа вариатора левого колеса первой оси на ту же самую величину Δuвар1 равенство (1) нарушится, и угловые скорости вращения полуосевых шестерен левого и правого колес первой оси станут соответственно равны


где  - угловые скорости вращения левой и правой полуосевых шестерен колес первой оси после коррекции передаточных чисел вариаторов первой оси.
- угловые скорости вращения левой и правой полуосевых шестерен колес первой оси после коррекции передаточных чисел вариаторов первой оси.
Т.о., правая полуосевая шестерня передней оси ускорится, а левая - замедлится. Однако скорость вращения корпуса межколесного дифференциала первой оси останется прежней

Несмотря на то, что симметричный межколесный дифференциал делит момент между полуосевыми шестернями поровну, момент, подводимый к правому колесу первой оси, в соответствии с возросшим передаточным числом участка трансмиссии между межколесным дифференциалом и ведущим колесом будет увеличен

а момент на левом колесе - уменьшен

при неизменной величине крутящего момента, подводимого к передней оси
 где
где  - соответственно моменты, подводимые к левому и правому колесу и к корпусу дифференциала после коррекции передаточных чисел вариаторов первой оси (фигура 2).
- соответственно моменты, подводимые к левому и правому колесу и к корпусу дифференциала после коррекции передаточных чисел вариаторов первой оси (фигура 2).
При одновременном увеличении передаточных чисел обоих вариаторов первой оси на величину Δuвар и уменьшении передаточных чисел обоих вариаторов второй оси на ту же самую величину Δuвар угловые скорости вращения приводных валов, передающих крутящий момент первой и второй ведущим осям, соответственно возрастут и уменьшатся и будут равны


где  - угловые скорости вращения приводных валов, передающих крутящий момент к первой и второй оси соответственно после коррекции передаточных чисел вариаторов первой и второй оси;
- угловые скорости вращения приводных валов, передающих крутящий момент к первой и второй оси соответственно после коррекции передаточных чисел вариаторов первой и второй оси;
uкр - передаточное число центрального редуктора.
Угловая скорость вращения корпуса межосевого дифференциала останется неизменной

где  - угловые скорости вращения корпуса межосевого дифференциала, распределяющего крутящий момент между первой и второй осью, до и после коррекции передаточных чисел вариаторов первой и второй оси соответственно.
- угловые скорости вращения корпуса межосевого дифференциала, распределяющего крутящий момент между первой и второй осью, до и после коррекции передаточных чисел вариаторов первой и второй оси соответственно.
Поскольку в симметричных межосевом и межколесных дифференциалах момент делится поровну, то момент, подводимый к колесам первой оси, в соответствии с возросшим передаточным числом участка трансмиссии между ведущим колесом и межосевым дифференциалом будет увеличен (фигура 3) и моменты на левом и правом колесе будут равны

а к колесам второй оси - уменьшен

Аналогично регулируется распределение соотношения крутящих моментов и между тележками транспортного средства (фигура 4).
Улучшение топливной экономичности транспортного средства достигается, во-первых, работой силовой установки на режиме минимального расхода топлива, что обеспечивается выбором соответствующей ступени в раздаточной коробке и среднего значения передаточного числа всех вариаторов транспортного средства (среднего для всего транспортного средства передаточного числа вариаторов), и, во-вторых, коррекцией передаточных чисел вариаторов так, чтобы при движении одиночного транспортного средства с постоянной скоростью обеспечить качение каждого из колес в свободном режиме, когда момент, подводимый к любому из колес, равен моменту сопротивления качению этого колеса. Выбор ступени в раздаточной коробке и передаточных чисел индивидуальных вариаторов осуществляется электронным блоком управления 11 на основе информации, получаемой от датчика положения педали подачи топлива 12, датчиков крутящих моментов 17, датчиков продольных и поперечных ускорений 18, датчика измерения угла поворота рулевого колеса 13, датчиков частоты вращения коленчатого вала двигателя 14 и движителей 15.
Переход с режима работы, обеспечивающего минимальный расход топлива, на режим движения с максимальной скоростью производится водителем принудительно при помощи переключателя 19 либо автоматически. Переход на другие режимы, например режим динамической стабилизации, производится автоматически.
При движении транспортного средства на поворотах с целью уменьшения вероятности скольжения колес одновременно увеличиваются передаточные числа вариаторов, приводящие внешние по отношению к центру поворота колеса, и соответственно возрастает тяга на этих наиболее нагруженных вертикальной силой колесах, а на внутренних разгруженных колесах в результате уменьшения передаточных чисел соответствующих вариаторов тяга снижается.
Если снос передних осей или занос задних осей все же происходит, то в режиме динамической стабилизации система управления работает следующим образом.
Во-первых, уменьшается момент, подводимый к скользящим осям, и увеличивается момент, подаваемый к нескользящим осям, для чего в вариаторах скользящих осей передаточное число уменьшают, а в вариаторах нескользящих осей - увеличивают.
Во-вторых, перераспределяют крутящий момент между колесами каждой из осей так, чтобы момент, создаваемый силами тяги колес одной оси, препятствовал развороту транспортного средства. Для этого при сносе передних колес на всех осях или только на нескользящих осях дополнительно увеличиваются передаточные числа вариаторов, расположенных вдоль того борта транспортного средства, в направлении которого происходит снос, и уменьшаются передаточные числа вариаторов вдоль другого борта. При заносе задних осей на всех осях или только на нескользящих осях дополнительно уменьшаются передаточные числа вариаторов, расположенных вдоль того борта, в направлении которого происходит занос транспортного средства, и увеличиваются передаточные числа вариаторов другого борта.
В-третьих, при необходимости уменьшается развиваемый двигателем крутящий момент и снижается частота вращения коленчатого вала двигателя.
Блокировка дифференциалов производится либо водителем вручную, с помощью переключателя 19, либо автоматически электронным блоком управления 11 при обнаружении буксования колес.
Благодаря применению данного метода становится возможным регулировать угловую скорость и подводимый крутящий момент каждого колеса в отдельности и при заблокированных дифференциалах, поэтому бесступенчатая трансмиссия транспортного средства способна устранить явление «циркуляции мощности», возникающее в агрегатах и узлах трансмиссии.
Для доказательства данного факта достаточно рассмотреть устранение явления «циркуляции мощности» на примере двухколесного велосипеда, совершающего криволинейное движение, колеса которого приводятся одной и той же цепью через звездочки одинакового диаметра, так как суть методики устранения этого явления аналогична для всех случаев и не зависит от количества колес и их взаимного расположения.
Допущения, принятые в рассмотрении:
1. Не учитываются коэффициенты увода колес.
2. Суммарный момент, прикладываемый к трансмиссии во время прохождения всего криволинейного участка траектории, не изменяется.
3. Радиус качения переднего колеса равен радиусу качения заднего колеса.
Итак, найдем крутящие моменты, действующие на оба колеса, при разных углах поворота переднего колеса. Для этого будем имитировать поворот переднего колеса изменением радиусов качения обоих колес на величину, зависящую от угла поворота, причем таким образом, чтобы сумма радиусов колес не изменилась (условие наложено природой явления, на борьбу с которым направлено изобретение).

X - величина, на которую надо изменить радиусы качения колес для имитации поворота велосипеда;
rp0 - радиус качения переднего колеса;
rz0 - радиус качения заднего колеса;
θ- угол поворота колеса;
rkp0=rp0+X;
rkp0 - измененный радиус качения переднего колеса;
rkz0=rz0-X;
rkz0 - измененный радиус качения заднего колеса.
Так как особенностью привода обусловлено равенство угловых скоростей переднего и заднего колеса, то их радиусы качения станут равными, а их приращения компенсируются закруткой или проскальзыванием колес в разных направлениях вращения. Найдем реальный радиус качения, скорректированный с учетом действия прикладываемого крутящего момента:

rk - реальный радиус качения колес;
λр - коэффициент тангенциальной эластичности переднего колеса;
λz - коэффициент тангенциальной эластичности заднего колеса;
М - суммарный крутящий момент.
Теперь найдем крутящие моменты, действующие на колеса:

Мр - крутящий момент, действующий на переднее колесо;
Mz - крутящий момент, действующий на заднее колесо.
На фигуре 5 представлены графики возможных зависимостей крутящих моментов, действующих на колеса, от угла поворота передних колес. Они иллюстрируют явление «циркуляции мощности». Найдем такое приращение угловой скорости, сообщив которое можно будет выровнять крутящие моменты, действующие на разные колеса, найдя перед этим приращение к радиусам качения:

rr - величина коррекции радиусов качения;

Δω - величина коррекции угловых скоростей колес.
Теперь скорректируем крутящие моменты, действующие на колеса:


На фигуре 5 представлены графики скорректированных крутящих моментов, действующих на разные колеса. Из них следует, что явление «циркуляции мощности» полностью устранено.
Принцип регулирования крутящего момента на отдельных колесах для полностью блокированной трансмиссии рассмотрим на примере установившегося прямолинейного движения транспортного средства, когда поступательные скорости осей всех колес равны между собой и равны поступательной скорости транспортного средства Vтс. Если скольжения колес нет и колеса вращаются с разными угловыми скоростями из-за неодинаковых передаточных чисел индивидуальных вариаторов, то отмеченное выше равенство скоростей может быть обеспечено только вследствие окружных деформаций колес, происходящих под действием крутящих моментов и соответствующих изменений их радиусов. Поэтому при рассмотрении блокированной трансмиссии в отличии от полностью дифференциальной трансмиссии обязателен учет зависимости радиуса качения колеса от подводимого к нему крутящего момента

где  - радиусы качения колес в ведомом режиме и действительные радиусы качения колес;
- радиусы качения колес в ведомом режиме и действительные радиусы качения колес;
Мi - крутящие моменты колес;
λi - коэффициенты изменения радиуса качения от крутящего момента;
n - число осей.
В то же время, радиусы качения колес связаны с поступательной скоростью движения транспортного средства уравнением

где uтрi - общее передаточное число i-ой ветви трансмиссии, передающей крутящий момент от двигателя к i-му колесу;
uтр - одинаковый для всех ветвей трансмиссии общий множитель, равный произведению передаточного числа всех агрегатов произвольной ветви трансмиссии за исключением вариатора.
Если теперь пренебречь потерями в трансмиссии, то из уравнений (2) и (3) путем несложных алгебраических преобразований может быть получено выражение для определения момента на i-м колесе в зависимости от передаточного числа i-ого вариатора при прямолинейном установившемся движении транспортного средства с блокированной трансмиссией.
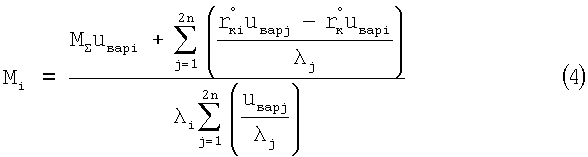
Анализ уравнения (4) показывает, что для увеличения крутящего момента на i-м колесе необходимо увеличить (уменьшить) передаточное число i-ого вариатора.
На фигуре 1 показаны бесступенчатая трансмиссия транспортного средства и система управления ей, а на фигурах 2, 3, 4 схематически показаны возможные схемы перераспределения крутящих моментов между движителями транспортного средства, где:
1 - силовая установка с электронным блоком управления;
2 - агрегат, позволяющий разрывать, трансформировать и отводить из трансмиссии часть потока мощности;
3 - раздаточная коробка, которая включает в себя дифференциалы с устройствами их блокировки и реверсивный редуктор;
4 - межосевой дифференциал (блокируемый);
5 - проходной центральный редуктор с межколесным дифференциалом и устройством для его дистанционной блокировки;
6 - предохранительная муфта;
7 - вариатор с гибким металлическим элементом;
8 - дополнительный редуктор;
9 - колесный редуктор;
10 - карданная или другая передача, способная передавать вращательное движение на расстоянии;
11 - электронный блок управления трансмиссией;
12 - датчик, определяющий положение педали подачи топлива;
13 - датчик измерения угла поворота рулевого колеса;
14 - датчик измерения частоты вращения двигателя;
15 - датчик измерения частоты вращения движителя;
16 - датчик измерения частоты вращения ведущего шкива вариатора;
17 - датчик измерения крутящего момента;
18 - датчики продольных и поперечных ускорений транспортного средства;
19 - переключатель режимов движения;
20 - движитель;
21 - устройство изменения радиуса обкатки шкивов вариатора.
Описанный в данной заявке метод управления бесступенчатой трансмиссией транспортного средства не является единственно возможным для реализации заявленного изобретения и достижения вышеуказанного технического результата и не исключает других методов, содержащих совокупность признаков, включенных в независимый пункт формулы изобретения.


Изобретение относится к транспортному машиностроению, в частности к способу управления трансмиссиями транспортных средств. Данный способ управления может быть применен к трансмиссии, в которой есть возможность индивидуального изменения скоростного соотношения и распределения крутящих моментов между отдельными ветвями потоков мощности трансмиссии. Способ заключается в оптимизации работы трансмиссии посредством организации определенных алгоритмов управления скоростными соотношениями и распределением соотношения крутящих моментов по различным ветвям потоков мощности трансмиссии. Это позволяет добиться индивидуального распределения соотношения крутящих моментов между отдельными колесами транспортного средства и устранить явление «циркуляции мощности». 4 ил.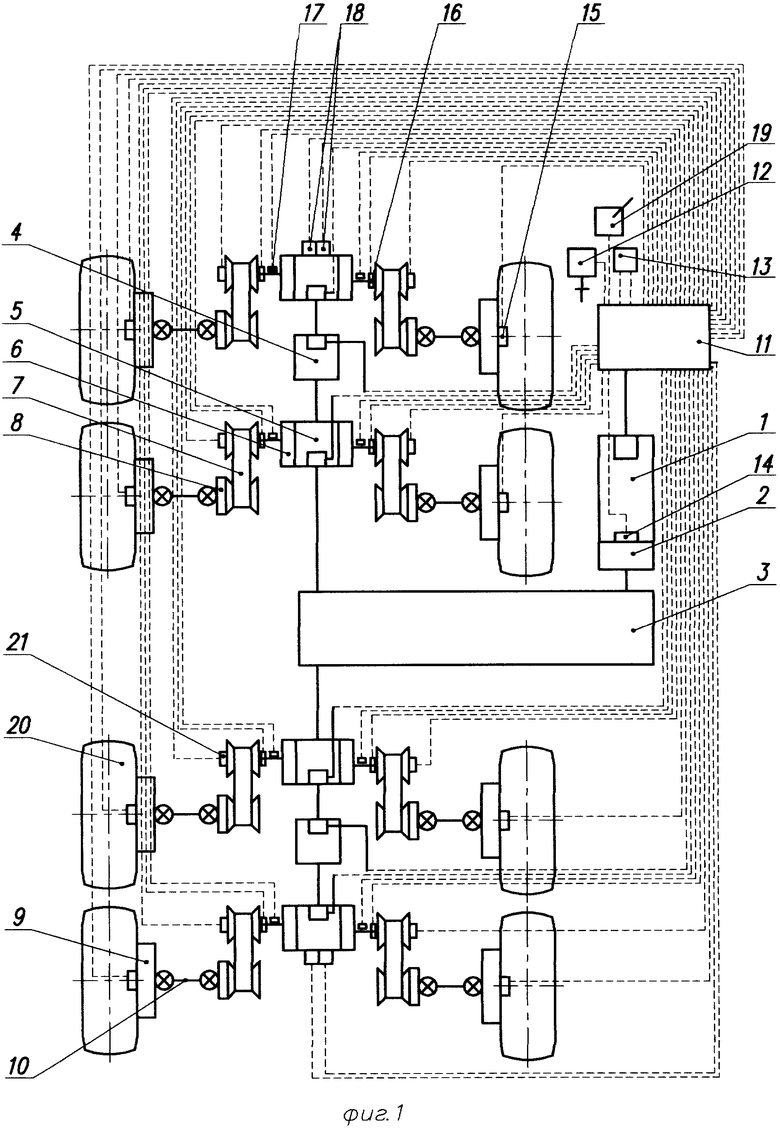
Способ управления трансмиссией транспортного средства посредством изменения скоростных соотношений и распределения соотношений крутящих моментов по различным ветвям потоков мощности трансмиссии, имеющей силовую установку с электронным блоком управления ею, агрегат, позволяющий разрывать, трансформировать и отводить из трансмиссии часть потока мощности, переключатель режима движения, раздаточную коробку, электронный блок управления трансмиссией, карданные или другие передачи, способные передавать вращательное движение на расстоянии, соединяющие между собой агрегаты трансмиссии, вариаторы с гибкими металлическими элементами и устройствами изменения радиуса обкатки шкивов вариаторов, датчики измерения частоты вращения ведущих шкивов вариаторов, датчик измерения частоты вращения выходного вала силовой установки, межосевые дифференциалы, датчик положения педали подачи топлива, движители, отличающийся тем, что осуществляют индивидуальное изменение скоростного соотношения и распределения крутящих моментов между отдельными движителями транспортного средства, при этом раздаточная коробка передает крутящий момент от силового агрегата к трансмиссионным модулям, причем если трансмиссия имеет количество ведущих осей более одной, то раздаточная коробка может иметь одну или большее количество ступеней, которые могут включать в себя дифференциалы с устройствами их блокировки, реверсивные редукторы, механизмы отбора мощности, датчики, регистрирующие режимы работы раздаточной коробки, дифференциалы, механизмы, управляющие режимами работы раздаточной коробки, двух или большего количества движителей, а каждый трансмиссионный модуль состоит из центрального проходного редуктора с дифференциалом и устройством для дистанционной блокировки этого дифференциала, двух предохранительных муфт, двух вариаторов с металлическими гибкими элементами с устройствами изменения радиуса обкатки ведущих шкивов, двух дополнительных редукторов, двух полуосей, двух колесных редукторов, двух датчиков измерения крутящего момента, расположенных между центральным редуктором и движителем, двух датчиков частоты вращения ведущего шкива вариатора, расположенных перед ведущим шкивом вариатора, и двух датчиков частоты вращения движителя, причем крутящий момент подводится к входному валу центрального редуктора, где ведущие элементы предохранительных муфт соединены с каждым из двух выходных валов последнего, а на их ведомых элементах установлены ведущие шкивы вариаторов, а ведомые шкивы вариаторов передают крутящий момент через дополнительные редукторы к колесным редукторам посредством полуосей, далее к движителям, а изменение радиуса обкатки каждого шкива вариатора задается электронным блоком управления трансмиссией, обрабатывающим сигнал от датчика положения педали подачи топлива, датчиков измерения крутящего момента, датчиков скорости вращения двигателя и колес транспортного средства, датчиков частоты вращения ведущих шкивов вариаторов, датчиков продольных и поперечных ускорений автомобиля, датчика измерения угла поворота рулевого колеса.
| US 4987967 А, 29.01.1991 | |||
| JP 59151661 А, 30.08.1984 | |||
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2219076C1 |
| Бесступенчатая трансмиссия транспортного средства | 1987 |
|
SU1418093A1 |

