Изобретение относится к области автомобилестроения.
Общеизвестен способ изменения направления движения транспортного средства, заключающийся в принудительном изменении углового положения управляемых колес относительно траектории движения, при котором разница в угловых скоростях внешних (относительно поворота) и внутренних колес компенсируется механизмом распределения крутящего момента - т.н. дифференциалом. Недостатком данного способа управления является недостаточная управляемость транспортного средства вследствие действия на кузов инерционных сил и снижение проходимости при применении свободно установленного дифференциала.
Существует система управления автомобилем без механической связи между органом управления и колесами - т.н. управление по проводам (steering by wire), в которой вращение руля отслеживает специальный датчик, посылающий сигнал в электронный блок управления, дающий команду актуаторам-электромоторам, поворачивающим колеса (журнал "За рулем", №2, 2004 г., с.70). Недостатком ее является недостаточная управляемость транспортного средства, сложность устройства.
Существует дифференциал с изменяющимся передаточным числом, содержащий корпус, ведущую шестерню, две ведомые шестерни полуосей и устройство распределения крутящего момента между ними, в котором коэффициент смещения крутящего момента между двумя шестернями полуосей является периодической функцией угла поворота сателлитов с ограничением пробуксовки одного из ведущих колес (№2004117875. Реферат). Недостаток данного дифференциала заключается в отсутствии возможности принудительного управления распределением крутящего момента, сложность устройства.
Наиболее близким аналогом предлагаемого устройства является система с управляемым дифференциалом, содержащая входной вал, две шестерни ведомых полуосей, механизм принудительного распределения крутящего момента между ними, привод управления, в которой перераспределением крутящего момента между полуосями управляют два электромагнитных сцепления, блокирующие один из двух элементов соответствующего планетарного редуктора, которые, в свою очередь, связывают шестерню главной передачи с двумя полуосями - т.н. система SH-AWD (Super Handing All-Wheel Drive system) (журнал «За рулем», №8, 2004 г., с.154).Недостатком ее является сложность устройства, а также 2-ступенчатое изменение крутящего момента.
Целью изобретения является улучшение проходимости и управляемости транспортного средства.
Поставленная цель достигается тем, что в корпусе с возможностью вращения установлены входной вал с шестерней, промежуточный вал, выходные валы, отличающемся тем, что содержит управляющий привод, вал управляющего привода с шестерней, блокировочную муфту, вал блокировочного механизма с конической шестерней, установленные на промежуточном валу ведомую шестерню главной передачи и передаточные шестерни, жестко связанные с ведомой шестерней главной передачи, два симметричных циклоидальных редуктора (ЦВ), ведущие шестерни которых выполнены заодно с ведущими солнечными колесами этих ЦР и установлены с возможностью свободного вращения на управляющих валах, промежуточные тела вращения, установленные на эксцентриках управляющих валов, связанных друг с другом посредством конических оборачивающих шестерен, блокирующей шестерни и привода управления и установленных с возможностью свободного вращения соосно выходным валам на подшипниках в их гнездах, и состоящие из сдвоенных попарно сателлитов, ведомые солнечные колеса, выполненные заодно с выходными валами.
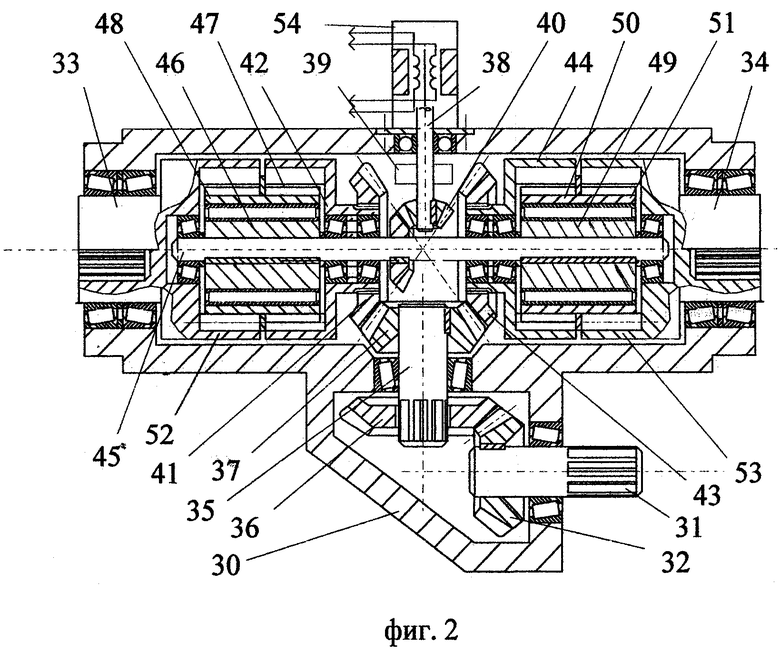
На фиг.1 изображена схема управляемого межколесного дифференциала с парными циклоидальными механизмами и двумя управляющими валами.
На фиг.2 изображена схема управляемого межоеевого дифференциала с парными циклоидальными механизмами и общим управляющим валом.
Управляемый межколесный (межосевой) дифференциал (далее УМД) может быть выполнен в нескольких вариантах.
Вариант первый
УМД, включающий корпус 1, в котором с возможностью вращения установлены входной вал 2 с шестерней 3, промежуточный вал 4, выходные валы 5 и 6, отличающийся тем, что содержит управляющий привод, вал 7 управляющего привода с шестерней 8, блокировочную муфту, вал 9 блокировочного механизма с конической шестерней 10, установленные на промежуточном валу ведомую шестерню 11 главной передачи и передаточные шестерни 12 и 13, жестко связанные с ведомой шестерней главной передачи, два симметричных циклоидальных редуктора (ЦР), ведущие шестерни 14 и 15 которых выполнены заодно с ведущими солнечными колесами 16 и 17 этих ЦР и установлены с возможностью свободного вращения на управляющих валах 18 и 19, промежуточные тела вращения 20 и 21, установленные на эксцентриках 22 и 23 управляющих валов, связанных друг с другом посредством конических оборачивающих шестерен 24 и 25, блокирующей шестерни 10 и привода управления 8 и установленных с возможностью свободного вращения соосно выходным валам 5 и 6 на подшипниках в их гнездах, и состоящие из сдвоенных попарно сателлитов 26 и 27, ведомые солнечные колеса 28 и 29, выполненные заодно с выходными валами (фиг.1).
Вариант второй
УМД содержит корпус 30, в котором с возможностью вращения установлены входной вал 31 с шестерней 32, выходные валы 33 и 34, промежуточный вал 35 с передаточными шестернями 36 и 37, отличающийся тем, что содержит управляющий привод, включающий вал 38 с механизмом блокировки 39 и ведущей шестерней 40, задний и передний циклоидальные редукторы (ЦР), ведущая шестерня 41 заднего ЦР выполнена заодно с солнечным колесом 42 первой ступени и установлена с возможностью свободного вращения на управляющем валу 45, ведущая шестерня 43 переднего циклоидальный редуктор выполнена заодно с солнечным колесом 44 первой ступени и установлена с возможностью свободного вращения на управляющем валу 45, промежуточное тело вращения заднего ЦР установлено с возможностью вращения на первом эксцентрике 46 управляющего вала 45, который установлен с возможностью вращения соосно с выходными валами 33 и 34 на подшипниках в их полостях и состоит из спаренных сателлитов 47 и 48 первой и второй ступеней, промежуточное тело вращения переднего циклоидального редуктора установлено с возможностью вращения на втором эксцентрике 49 управляющего вала 45 и состоит из спаренных сателлитов 50 и 51 первой и второй ступеней, солнечное колесо 52 второй ступени заднего ЦР выполнено заодно с задним выходным валом 33, солнечное колесо 53 второй ступени переднего ЦР выполнено заодно с передним выходным валом 34, управляющий привод 54 (фиг.2)
Управляемый межколесный дифференциал работает следующим образом.
Вариант первый (фиг 1)
Первый режим. Свободный дифференциал. Шестерня 10 разблокирована, ее вал 9 свободно вращается в подшипниках корпуса. Электродвигатель обесточен, вал 7 электродвигателя свободно вращается. Крутящий момент с входного вала 2 в равных пропорциях распределяется между двумя ветвями редуктора. Шестерни 12, 13 вращаются с равными угловыми скоростями. При прямолинейном движении выходные валы 5, 6 также вращаются с равными угловыми скоростями в одном направлении. Холостой ход обоих циклоидальных редукторов (далее - ЦР) и вращение их управляющих валов 18, 19 в одном направлении исключаются шестернями 8 и 10. При изменении направления движения транспортного средства возникающую разность моментов вращения выходных валов 5 и 6, передаваемых через промежуточные тела вращения 20 и 21 и сдвоенные сателлиты 26, 27 на валы 18, 19, компенсирует вращение шестерен 8 и 10, работающих в данном случае как сателлиты обычного дифференциала. Благодаря большим передаточным числам обоих ЦР возможно уменьшение размеров элементов блокировочного и управляющего узлов и всего устройства.
Второй режим. Управляемый дифференциал. Шестерня 10 разблокирована, вал 7 и шестерня 8 вращаются под воздействием крутящего момента электродвигателя. При неподвижном ее положении валы 18 и 19 также неподвижны, промежуточные тела вращения со сдвоенными сателлитами 26 и 27 вращаются с одинаковыми угловыми скоростями, выходные валы 5 и 6 вращаются с равными угловыми скоростями. Транспортное средство движется в прямолинейном направлении. Вращением шестерни 8 в ту или иную сторону валы 18, 19 приводятся во взаимообратное симметричное вращение, один из выходных валов получает импульс к ускорению вращения, другой - к пропорциональному замедлению. Выполняется алгоритм работы полуосей колес, аналогичный традиционному при повороте, с той разницей, что в данном случае он принудительный.
Третий режим. Блокировка дифференциала. Шестерня 10 стопорится посредством муфты 9. Электродвигатель обесточен. Валы 18, 19 фиксируются в неподвижном положении, выходные валы 5, 6 вращаются с одинаковыми угловыми скоростями. Нагрузка в трансмиссии, возникающая при изменении направления движения транспортного средства, воспринимается и пресекается неподвижной шестерней 10.
Вариант второй (фиг.2). Аналогичен варианту первому. Отличие заключается в том, что во взаимообратное движение непосредственно от входного вала 31 через шестерню 32, промежуточный вал 35, конические шестерни 36 и 37 приводятся ведущие 41, 43 шестерни обоих ЦР. Управляющий вал 45 общий для обоих ЦР. На входном валу в качестве эпициклического дифференциала может быть установлен планетарный редуктор с механизмом блокировки, в таком случае распределение крутящего момента также будет несимметричным. Взаимообратное вращение выходных валов 33, 34 дифференциала требует соответственного исполнения мостовых редукторов. При установке оборачивающей шестерни непосредственно в редукторе (для изменения вращения одного из валов на обратное) мостовые редукторы могут быть взаимозаменяемыми.
В обоих вариантах УМД дополнительно может иметь входной (главный) дифференциал с механизмом блокировки, при этом заблокированный дифференциал позволяет на выходе всего механизма иметь разницу угловых скоростей выходных валов при равных крутящих моментах на них, а свободный дифференциал позволяет получить разницу крутящих моментов при равных угловых скоростях выходных валов. В данном варианте устройство может работать и как система контроля тяги (Traction Control).
Механизм дифференциала способен к «самообучению» при наличии компьютерного блока управления и соответствующей программы (в данном случае необходимо также наличие традиционного рулевого управления). Для этого достаточно применение трех датчиков: датчика положения рулевого колеса, датчика вращения вала электродвигателя и амперметра в цепи электродвигателя. При первоначальной (заводской) настройке дифференциала, установленного на стандартно оборудованный автомобиль, для записи алгоритма работы в программу управления необходимо обкатать механизм в оптимальных дорожных условиях с перемещением управляемых колес «от упора до упора» в режиме свободного дифференциала. В дальнейшем этот алгоритм принимается «по умолчанию» за «рабочий». При смене ведущих колес на другие, отличные по размеру от стандартных (напр., по диаметру или величине вылета диска), блок управления перенастраивается на новый алгоритм аналогично методике, описанной выше, с занесением данных в память программы. Методика настройки механизма проста и может осуществляться непосредственно владельцем транспортного средства.
Также, по изменению нагрузки в цепи управляющего привода система может уведомлять водителя об изменении давления воздуха в шинах ведущих колес с инициализацией процесса перепрограммирования блока управления.
При совместном использовании предлагаемого устройства с антиблокировочной системой (ABS) можно устанавливать датчики вращения колес непосредственно внутри УМД на выходных валах, что может быть выгодно с точки зрения компоновки и ресурса ABS.
Достоинство предлагаемого устройства заключается в простоте изготовления, многофункциональности, возможности адекватной настройки механизма с учетом применения колес, отличных от стандартных, высоком КПД и нагрузочной способности циклоидальной передачи, уменьшении износа трущихся деталей за счет многопарности зацепления, широком диапазоне передаточных отношений и настройки дифференциала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ С ВОЛНОВЫМ РЕДУКТОРОМ, АКТИВНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ С ЦИКЛОИДАЛЬНЫМ ВАРИАТОРОМ | 2007 |
|
RU2370398C2 |
| АКТИВНАЯ ТРАНСМИССИЯ, КОРОБКА ПРЯМОГО ВКЛЮЧЕНИЯ (МЕХАНИЧЕСКАЯ), КОРОБКА СКОРОСТЕЙ С ПЛАНЕТАРНЫМ ФРИКЦИОНОМ И НЕЗАВИСИМОЙ ЗАДНЕЙ ПЕРЕДАЧЕЙ, РАЗДАТОЧНАЯ КОРОБКА С МЕХАНИЗМОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ОСЯМИ (КОЛЕСАМИ) | 2004 |
|
RU2292270C2 |
| РАЗДАТОЧНАЯ КОРОБКА С МЕЖОСЕВЫМ ДИФФЕРЕНЦИАЛОМ СНЕГОБОЛОТОХОДА | 2024 |
|
RU2835224C1 |
| ПУЛЬТ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2003 |
|
RU2272732C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| УПРАВЛЯЕМАЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2552375C1 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
Изобретение относится к области автомобилестроения, а также транспортного машиностроения. Управляемый межколесный (межосевой) дифференциал содержит корпус (1), в котором установлены входной вал (2) с шестерней (3), промежуточный вал (4), выходные валы (7,8), управляющий привод, вал (5) управляющего привода с шестерней (6), блокировочную муфту, вал (9) блокировочного механизма с конической шестерней (10), установленные на промежуточном валу (4) ведомую шестерню (11) главной передачи и передаточные шестерни(12, 13), связанные с ведомой шестерней главной передачи, два симметричных циклоидальных редуктора (ЦР), ведущие шестерни (14, 15) которых выполнены заодно с ведущими солнечными колесами этих ЦР и установлены на управляющих валах. Промежуточные тела вращения состоят из сдвоенных попарно сателлитов (26, 27), которые установлены на эксцентриках (22, 23) управляющих валов и связаны друг с другом посредством конических оборачивающих шестерен (24, 25), блокирующей шестерни и привода управления (8). Во втором варианте исполнения управляемого межколесного (межосевого) дифференциала использован один управляющий вал, на котором установлены ступени переднего и заднего ЦР. Изобретение позволяет улучшить проходимость и управляемость транспортного средства. 2 н. и 2 з.п. ф-лы, 2 ил.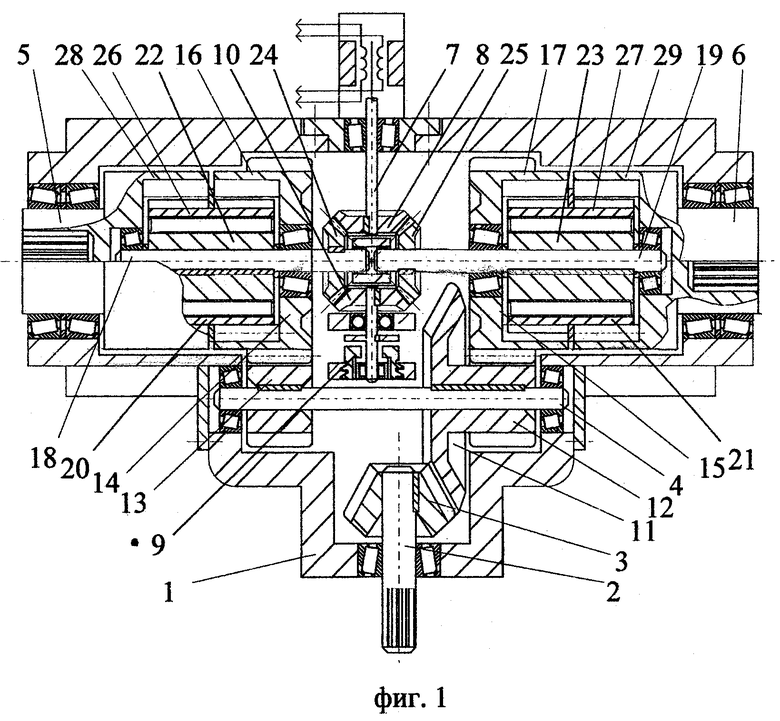
1. Управляемый межколесный (межосевой) дифференциал, включающий корпус, в котором с возможностью вращения установлены входной вал с шестерней, промежуточный вал, выходные валы, отличающийся тем, что содержит управляющий привод, вал управляющего привода с шестерней, блокировочную муфту, вал блокировочного механизма с конической шестерней, установленные на промежуточном валу ведомую шестерню главной передачи, и передаточные шестерни, жестко связанные с ведомой шестерней главной передачи, два симметричных циклоидальных редуктора (ЦР), ведущие шестерни которых выполнены заодно с ведущими солнечными колесами этих ЦР и установлены с возможностью свободного вращения на управляющих валах, промежуточные тела вращения, установленные на эксцентриках управляющих валов, связанных друг с другом посредством конических оборачивающих шестерен, блокирующей и привода управления и установленных с возможностью свободного вращения соосно выходным валам на подшипниках в их гнездах, и состоящие из сдвоенных попарно сателлитов, ведомые солнечные колеса, выполненные заодно с выходными валами.
2. Управляемый дифференциал по п.1, отличающийся тем, что содержит входной (главный) дифференциал с механизмом блокировки, при этом заблокированный дифференциал позволяет на выходе всего механизма иметь разницу угловых скоростей выходных валов при равных крутящих моментах на них, а свободный дифференциал позволяет получить разницу крутящих моментов при равных угловых скоростях выходных валов.
3. Управляемый межколесный (межосевой) дифференциал, содержащий корпус, в котором с возможностью вращения установлены входной вал с шестерней, выходные валы, промежуточный вал с передаточными шестернями, отличающийся тем, что содержит управляющий привод, включающий вал с механизмом блокировки и ведущей шестерней, задний и передний циклоидальные редукторы (ЦР), ведущая шестерня заднего ЦР выполнена заодно с солнечным колесом первой ступени и установлена с возможностью свободного вращения на управляющем валу, ведущая шестерня переднего ЦР выполнена заодно с солнечным колесом первой ступени и установлена с возможностью свободного вращения на управляющем валу, промежуточное тело вращения заднего ЦР установлено с возможностью вращения на первом эксцентрике управляющего вала, который установлен с возможностью вращения соосно с выходными валами на подшипниках в их полостях, и состоит из спаренных сателлитов первой и второй ступеней, промежуточное тело вращения переднего ЦР установлено с возможностью вращения на втором эксцентрике управляющего вала и состоит из спаренных сателлитов первой и второй ступеней, солнечное колесо второй ступени заднего ЦР выполнено заодно с задним выходным валом, солнечное колесо второй ступени переднего ЦР выполнено заодно с передним выходным валом, при этом во взаимообратное вращение непосредственно от входного вала приводятся ведущие шестерни обоих ЦР, имеющих общий управляющий вал.
4. Управляемый дифференциал по п.2, отличающийся тем, что содержит входной (главный) дифференциал с механизмом блокировки, при этом заблокированный дифференциал позволяет на выходе всего механизма иметь разницу угловых скоростей выходных валов при равных крутящих моментах на них, а свободный дифференциал позволяет получить разницу крутящих моментов при равных угловых скоростях выходных валов.
| Бесступенчатый механизм поворота транспортного средства | 1986 |
|
SU1368219A1 |
| US 6120407 A1, 19.09.2000 | |||
| US 4819512 A, 11.04.1989 | |||
| Устройство для маркировки заготовок краской | 1976 |
|
SU575152A2 |

