Изобретение относится к области ракетной техники и может быть использовано в различных типах ракет с комбинированным аэрогазодинамическим управлением с целью повышения ее маневренных характеристик.
Известна ракета, выполненная по аэродинамической схеме «утка», содержащая цилиндрический корпус с оживальной носовой частью. Внутри корпуса ракеты размещены аппаратура управления, боевое снаряжение и двигательная установка с устройством управления вектором тяги.
На корпусе ракеты расположены равномерно относительно его продольной оси четыре неподвижных крыла с элеронами и механизмом управления ими. В тандеме с крыльями установлены четыре управляющих, соединенных попарно и противоположно расположенных аэродинамических руля.
Перед рулями установлены четыре неподвижных дестабилизатора, а перед дестабилизаторами четыре бортовых флюгерных датчика углов атаки, определяющих местные углы атаки (смотри, например, журнал «Aviation week and Space Technology», 1995 г., №10, т.143, с.25; справочник А.В.Карпенко «Российское ракетное оружие» 1943...1993 гг., С-Петербург, с.149; издательство «ПИКА», 1993 г. и журнал «Military Technology», т 17, №7, 1994 г., с.20...23).
Эта ракета выбрана в качестве прототипа по данной заявке и наиболее подробно описана в журнале «Military Technology» (R-73).
Согласно описанию данная ракета имеет высокие маневренные характеристики за счет использования устройства, управляющего вектором тяги двигателя, которое работает только на активном участке ее полета.
Такая схема управления приводит к тому, что ракета имеет большие углы атаки (α≈40...45 град) только на активном участке траектории и следовательно, высокие маневренные характеристики.
На пассивном участке траектории эта ракета имеет относительно небольшие углы атаки (α≈10...12 град) и следовательно, низкие маневренные характеристики.
Рассматриваемой ракете присущи следующие аэродинамические особенности, затрудняющие реализацию ее полета на больших углах атаки на пассивном участке траектории:
- значительное изменение (увеличение) степени аэродинамической статической устойчивости ракеты при переходе от активного участка полета на пассивный за счет перемещения центра масс вперед;
- большие ошибки измерений углов атаки бортовыми флюгерными датчиками углов атаки, измеряющими местный угол атаки αмест.
Данное изобретение направлено на решение технической задачи по созданию ракеты, имеющей высокие маневренные характеристики как на активном, так и на пассивном участках траектории, т.е. имеющей возможности выходить на углы атаки 30...40 град на обоих участках траектории.
Эта задача решается тем, что в ракете, выполненной по аэродинамической схеме «утка», содержащей цилиндрический корпус с оживальной носовой частью, размещенные в нем двигательную установку с топливным зарядом, центр масс которого расположен сзади центра масс ракеты, устройство управления вектором тяги двигателя, боевое снаряжение и аппаратуру системы управления, а также расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с элеронами и механизмом управления ими, в тандеме с крыльями установлены четыре управляющих, соединенных попарно и противоположно расположенных, аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, и устройство для определения углов атаки ракеты, включающее четыре бортовых флюгерных датчика углов атаки, установленных перед дестабилизаторами, отличие состоит в том, что крылья, рули и дестабилизаторы установлены вдоль корпуса ракеты таким образом, чтобы в начале активного полета ракета была статически неустойчивой с коэффициентом статической устойчивости
 ,
,
где xT - центр масс ракеты,
xF - фокус ракеты (центр давления),
Lф - длина фюзеляжа ракеты,
при этом ракета снабжена двумя устройствами определения истинных углов атаки, каждый из которых включает два, лежащих в одной плоскости ранее упомянутых бортовых флюгерных датчика углов атаки и дополнительно введенные формирователь корректирующего сигнала, блок определения поправок в зависимости от числа М, датчик перегрузок, фильтр, пороговое устройство и коммутатор, причем датчик перегрузок расположен в плоскости, перпендикулярной плоскости измерения угла атаки, выходы бортовых флюгерных датчиков углов атаки соединены со входом коммутатора, выход которого подключен ко входу формирователя, другой вход которого соединен с выходом блока поправок в зависимости от числа М, выход датчика перегрузки через фильтр соединен с пороговым устройством, выход которого соединен со входом коммутатора.
Такое выполнение ракеты позволяет обеспечить большие углы атаки как на активном участке полета за счет удержания неустойчивой ракеты на потребных углах атаки при помощи аэродинамических рулей и газодинамического устройства (устройство управления вектором тяги двигателя), так и на пассивном участке, после выгорания топлива и перехода на малые запасы статической устойчивости только аэродинамическими рулями.
Кроме того, согласно изобретению, в заявленной ракете механизм управления элеронами выполнен в виде кольца с четырьмя углублениями и обоймой с подшипниками, равномерно установленными в ней и выступающими за обводы кольца с возможностью взаимодействия с пазом, выполненным на внутренней поверхности отсека, при этом элероны кинематически связаны с кольцом посредством качалок, взаимодействующих с углублением в кольце.
Это позволяет сделать ракету с минимальной массой и длиной.
В целом предлагаемое изобретение позволяет при минимальных габаритах и массе ракеты обеспечить ей высокоманевренные характеристики на всей траектории полета и во всем диапазоне ее применения.
Сущность предлагаемого изобретения поясняется графическими материалами, где
на фиг.1 изображен общий вид ракеты;
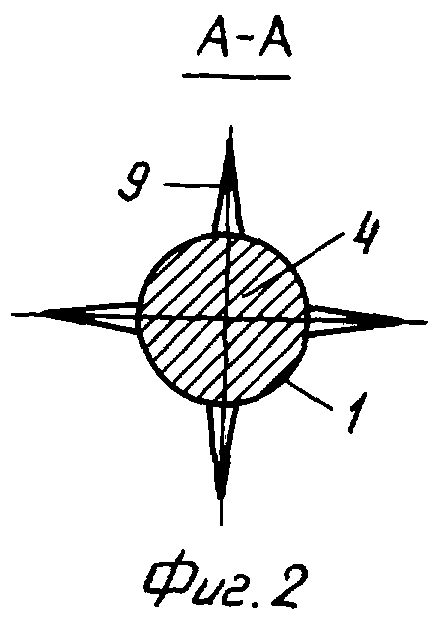
на фиг.2 - сечение А-А фиг.1;
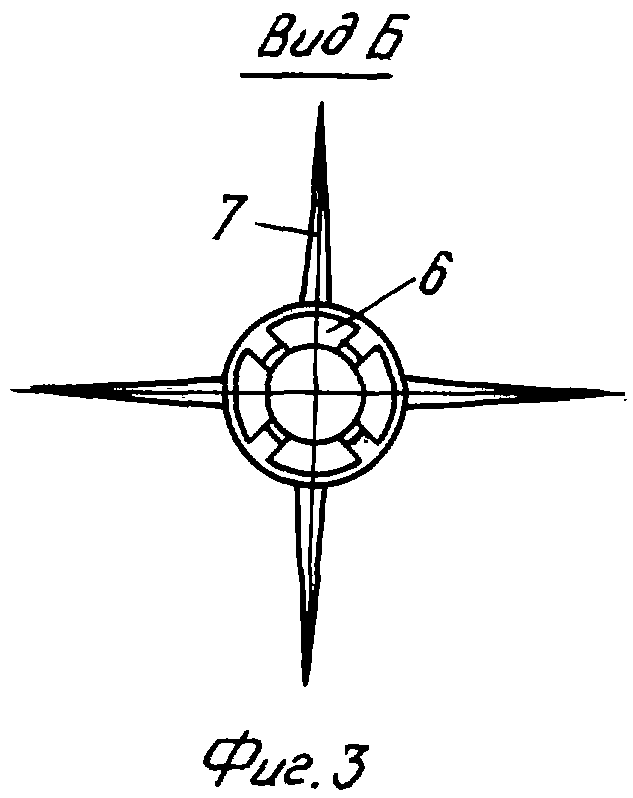
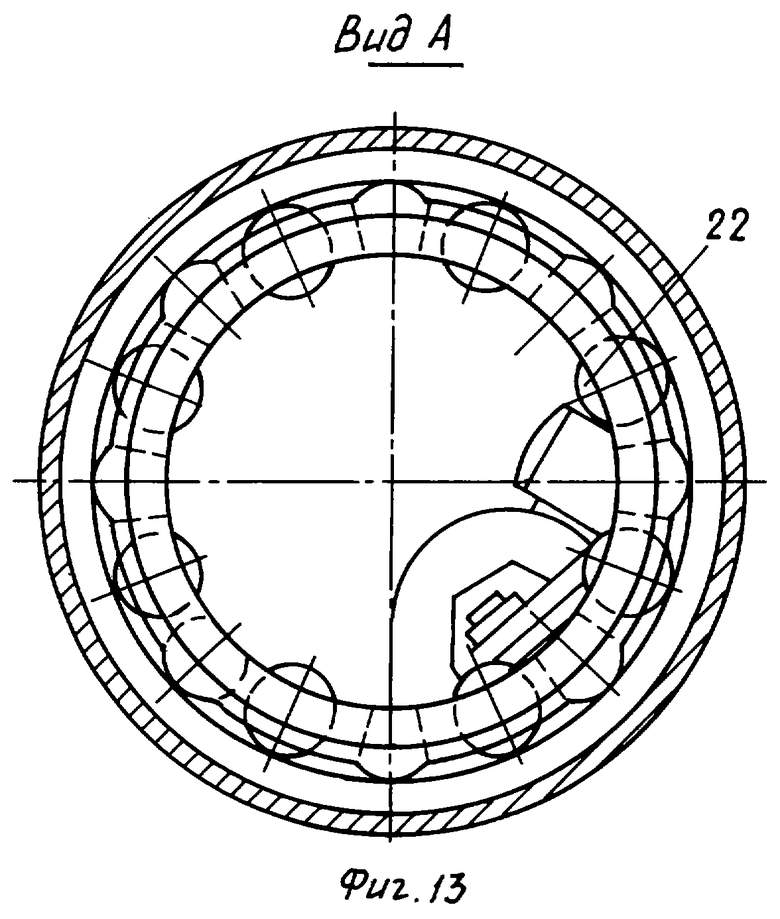
на фиг.3 - вид Б фиг.1;
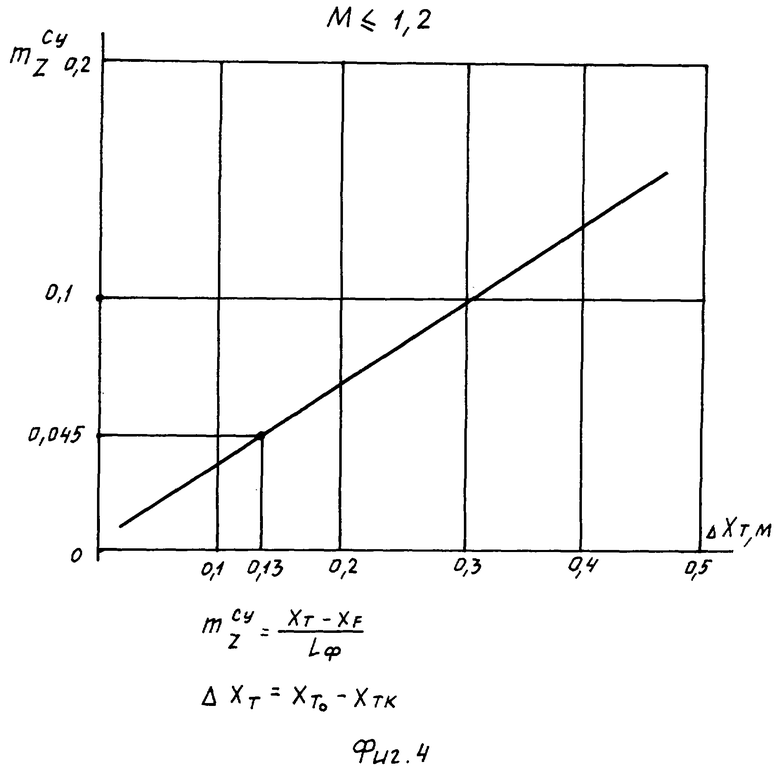
на фиг.4 - графическое изображение зависимости коэффициента статической устойчивости  от разбежки центра масс ракеты Δхт;
от разбежки центра масс ракеты Δхт;
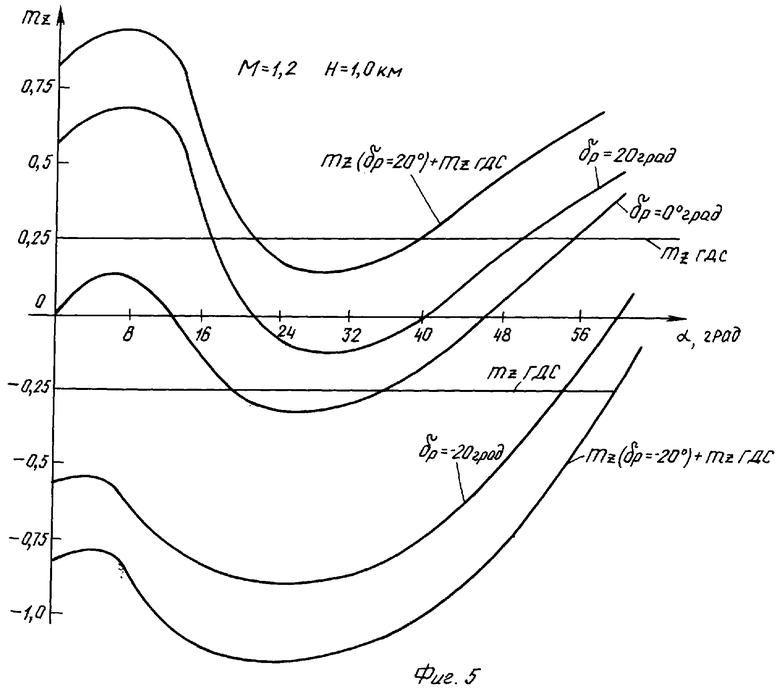
на фиг.5 - графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки α в начале активного участка полета ракеты;
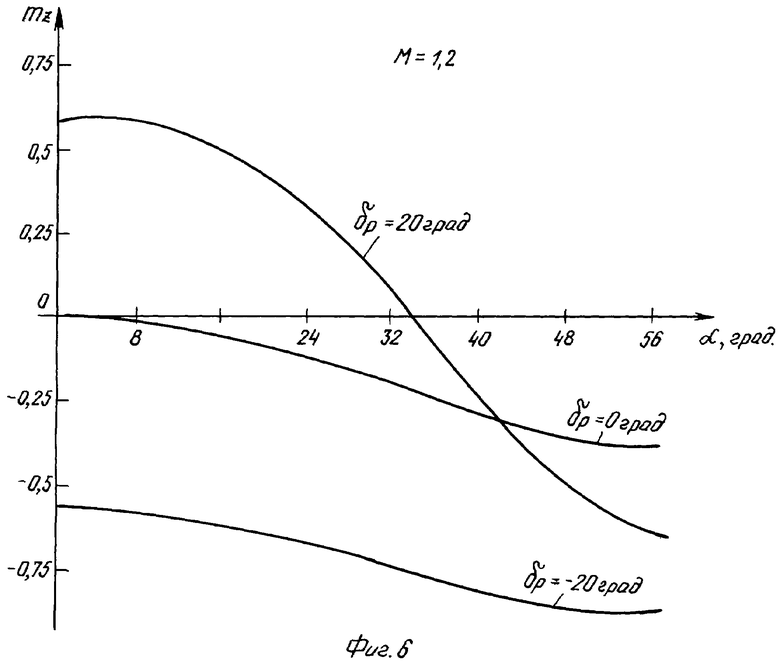
на фиг.6 - графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки α на пассивном участке полета ракеты;
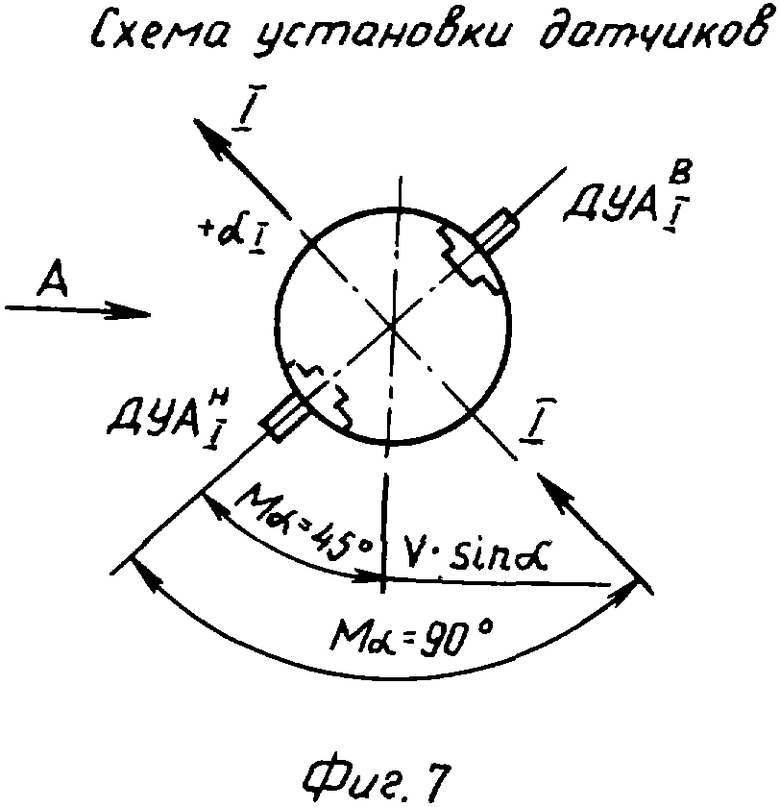
на фиг.7 - схема установки бортовых флюгерных датчиков углов атаки (ДУА), где I-I - плоскость канала измерения угла атаки; μα - полярный угол между плоскостью канала измерения I-I и плоскостью угла атаки;  и
и  - нижний и верхний датчики в плоскости измерения I-I; V - скорость набегающего потока;
- нижний и верхний датчики в плоскости измерения I-I; V - скорость набегающего потока;
на фиг.8 - вид А фиг.7;
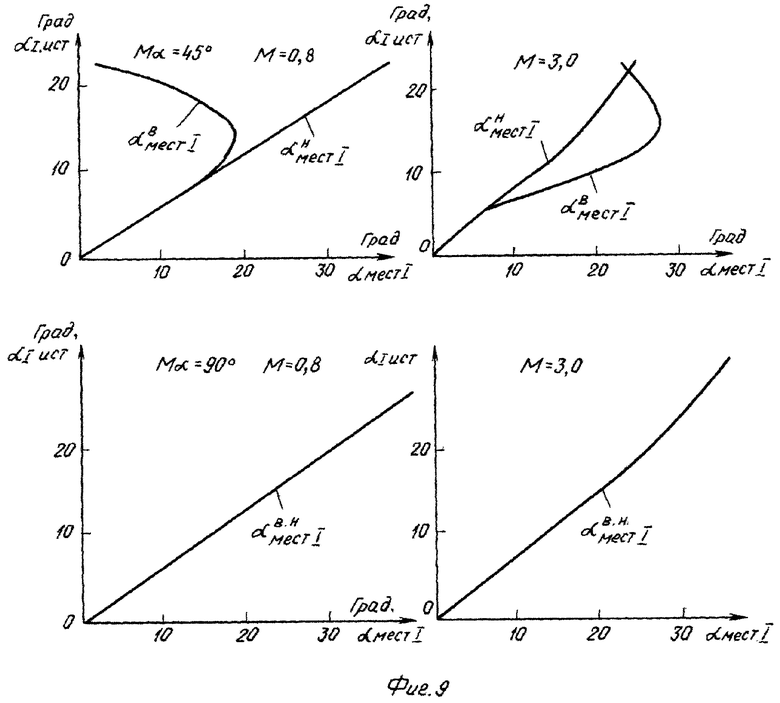
на фиг.9 - результаты продувок в аэродинамической трубе модели управляемой ракеты с бортовыми флюгерными ДУА, где αI ист - истинный угол атаки в плоскости измерения I-I,  - показания датчика (верхнего), - показания датчика (нижнего);
- показания датчика (верхнего), - показания датчика (нижнего);
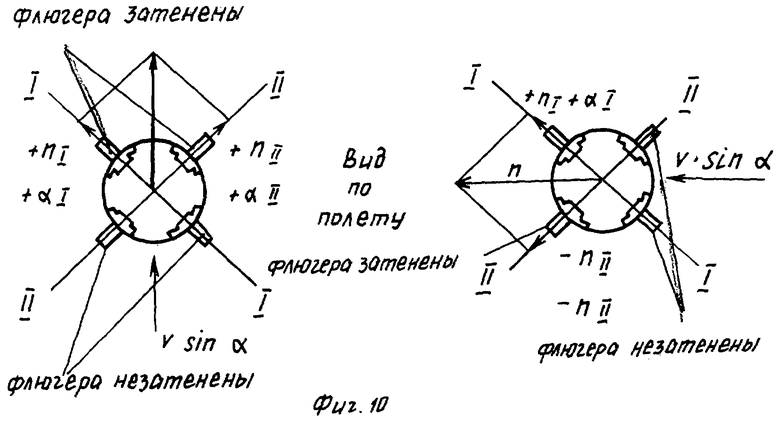
на фиг.10 показана связь между затенением флюгеров ДУА в каждой плоскости измерения углов атаки и знаком перегрузки во взаимоперпендикулярных плоскостях, где I-I и II-II каналы, в которых измеряются углы атаки, αI и αII - углы атаки в плоскостях измерения I-I и II-II, nI и nII - значение перегрузок в плоскостях измерения I-I и II-II;
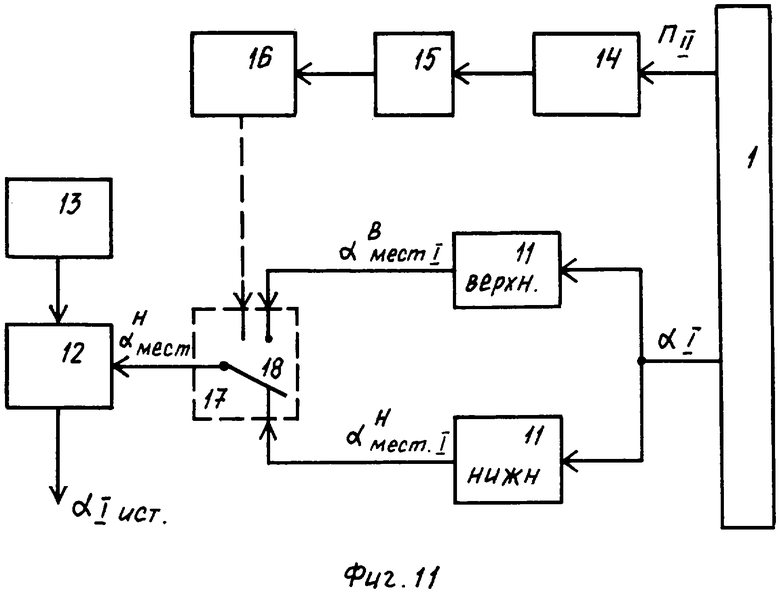
на фиг.11 приведена структурная схема предлагаемого устройства определения истинных углов атаки управляемой ракеты в одном из каналов;
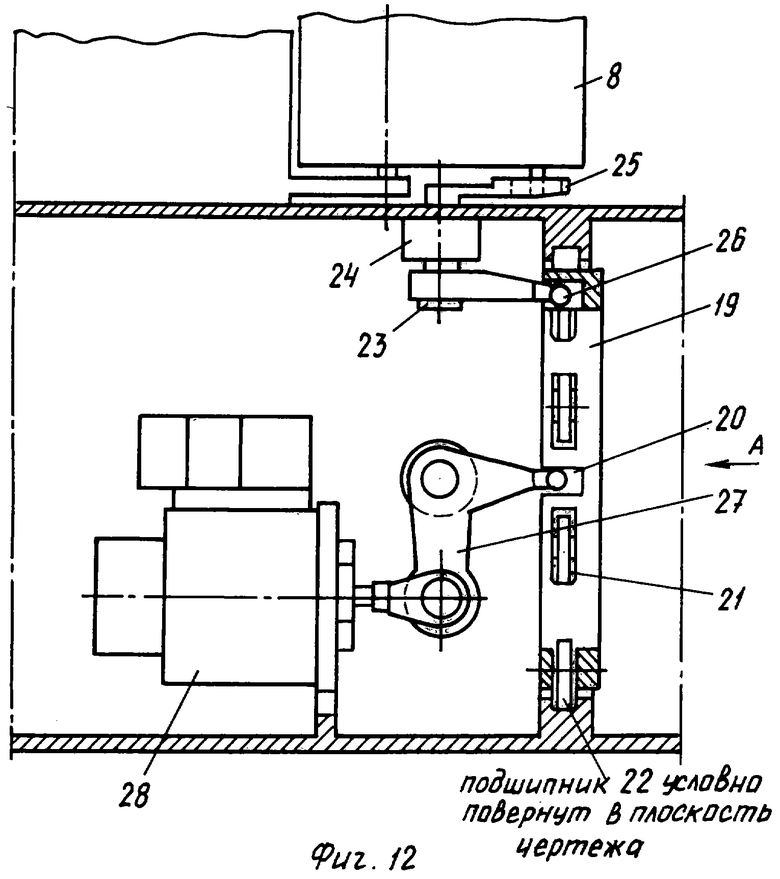
на фиг.12 - общий вид механизма управления элеронами;
на фиг.13 - сечение А-А фиг.12.
Ракета согласно изобретению содержит цилиндрический корпус 1, включающий передний обтекатель 2 оживальной формы. Внутри корпуса 1 размещены аппаратура управления 3, боевое снаряжение 4 и двигатель 5 с устройством управления вектором тяги в виде установленных на сопловой части двигателя четырех интерцепторов 6.
Ракета выполнена по аэродинамической схема «утка», в соответствии с которой на корпусе 1 размещены четыре крыла 7 с кинематически связанными между собой четырьмя элеронами 8 и четыре соединенных попарно противоположно расположенных аэродинамических руля 9. Ракета оснащена четырьмя дестабилизаторами 10, установленными перед рулями 9 и четырьмя бортовыми флюгерными ДУА 11, измеряющими местные углы атаки (αместн) и установленными перед дестабилизаторами 10. Кроме того, в основных каналах управления (каналы I-I, II-II) имеются: блок 12 формирования корректирующего сигнала, блок 13 определения поправок в зависимости от числа М, датчик перегрузок 14, расположенный в плоскости, перпендикулярной плоскости измерения углов атаки, фильтр 15, пороговое устройство 16 и коммутатор 17, содержащий контактор 18.
Механизм управления элеронами 8 состоит из кольца 19 с четырьмя углублениями 20 и обоймой 21, восьми подшипников 22, равномерно установленных в обойме 21, и четырех качалок 23, обеспечивающих кинематическую связь между элеронами 8 и кольцом 19. Каждая качалка 23 установлена на подшипнике 24 и имеет рычаг 25 для взаимодействия с элероном 8 и рычаг 26 для взаимодействия с кольцом 19 через углубление 20. Одна из качалок 23 имеет дополнительный рычаг 27 для стыковки ее с рулевым приводом 28.
Полет заявленной ракеты осуществляется следующим образом.
При полете на начальном участке траектории ракета статически неустойчива и удерживается на потребных углах атаки при помощи элеронов 8 и интерцепторов 6 устройства управления вектором тяги двигателя.
Обычно эти углы атаки ограничены 40...45 градусами (из-за малой эффективности элеронов на углах атаки α>40...45 градусов).
После выгорания топлива двигателя и перемещения центра тяжести вперед запас статической устойчивости ракеты становится близким к нулю, что позволяет выводить ее на углы атаки больше 30 градусов только аэродинамическими рулями.
Для обеспечения необходимой начальной статической неустойчивости ракеты можно пользоваться графиком на фиг.4, где в зависимости от разбежки центра масс ракеты Δхт=(xт-xтк) даны значения коэффициента статической устойчивости . Приведенные в качестве примера зависимости на фиг.5 и 6 взяты для ракеты, принятой в качестве прототипа, и имеющей разбежку центра масс Δхт=0,13 м.
Для расчета аэродинамических характеристик приняты наиболее характерные для данного типа ракеты скорости и высота полета (М=1,2; Н=1,0 км).
Коэффициент момента тангажа от боковой газодинамической силы mzгдс определяется по следующей формуле:
 ,
,
где P - боковая газодинамическая сила, кг;
q - скоростной напор на Н=1,0 км и М=1,2 кг/м2;
l - расстояние между точкой приложения боковой газодинамической силы и центром тяжести ракеты, м;
Sм - площадь миделя ракеты, м2;
Lф - длина фузеляжа ракеты, м.
Как видно из графиков фиг.4 ракета с разбежкой центра масс Δхт=0,13 м должна иметь в начале активного участка полета коэффициент статической неустойчивости  , чтобы обеспечить на пассивном участке полета статическую устойчивость, близкую к нейтральной
, чтобы обеспечить на пассивном участке полета статическую устойчивость, близкую к нейтральной  .
.
Как видно из графиков фиг.5, при углах отклонения рулей δр=0град, δр=20 град, δр=-20 град ракета статически неустойчива и без устройства управления вектором тяги двигателя становится неуправляемой на углах атаки, превышающих 20°.
При использовании аэрогазодинамического управления (графики mz(δp=20 град)+mzгдс и mz(δp=-20 град)+mzгдс фиг.5) обеспечивается достижение углов атаки до ˜60 град.
На графиках фиг.6 приведены моментные характеристики ракеты на пассивном участке ее полета при отклоненных рулях δр=0 град, δp=20 град и δр=-20 град.
Как видно из графиков, на пассивном участке полета ракета имеет малый запас статической устойчивости, что обеспечивает вывод ее на углы атаки больше 30 град только за счет аэродинамических рулей.
Во время полета ракеты осуществляется постоянное определение текущего значения угла атаки посредством устройств определения истинных углов атаки αист, информация из которых поступает в систему управления ракетой.
Предложенное устройство определения истинных углов атаки αист работает следующим образом, смотри фиг.11.
Бортовые флюгерные датчики 11, расположенные симметрично с разных сторон корпуса ракеты 1 и механически не связанные друг с другом (см. фиг.7), измеряют местные углы атаки скошенного потока в заданной плоскости измерения  . При этом в каждый момент полета один из флюгеров является незатененным носовой частью фюзеляжа ракеты, а другой - затененным. Сигналы от флюгеров 11 поступают на разные выходы коммутатора 17.
. При этом в каждый момент полета один из флюгеров является незатененным носовой частью фюзеляжа ракеты, а другой - затененным. Сигналы от флюгеров 11 поступают на разные выходы коммутатора 17.
Датчик перегрузки 14, расположенный в плоскости II, перпендикулярной заданной плоскости I измерения угла атаки α, замеряет перегрузку nII ракеты в плоскости II. Сигнал от датчика перегрузки 14 фильтруется от шумов с помощью фильтра 15 и поступает в пороговое устройство 16, которое вырабатывает управляющий сигнал в зависимости от знака перегрузки.
Управляющий сигнал порогового устройства 16 поступает на управляющий вход переключающего блока 17, который с помощью контактора 18 подключает в цепь определения истинного угла атаки сигнал от незатененного в данный момент флюгера 11.
Сигнал от незатененного флюгера 11 корректируется в блоке 12 формированием корректирующего сигнала, вырабатываемого по материалам продувок в аэродинамических трубах. Для этого в блок 13 определения поправок заведены полученные в результате продувок зависимости истинного угла атаки от значения угла атаки, выдаваемого незатененным флюгерным датчиком в зависимости от числа М.
Этот корректирующий сигнал из блока 13 поступает на блок 12.
Число М в блок 13 выдается из самолета-носителя в момент пуска ракеты. Вход блока 12 формирования корректирующего сигнала является выходом корректирующего устройства  ,
,
где  - показания угла атаки незатененным флюгером плоскости I-I;
- показания угла атаки незатененным флюгером плоскости I-I;
К - поправочный коэффициент, вырабатываемый по материалам продувок и значений числа М в блоке поправок 13 (результаты на фиг.9).
Такое выполнение устройства в ракете позволяет получать высокоточную информацию об углах атаки управляемых ракет в широком диапазоне условий полета без ухудшения их конструкции и аэродинамических характеристик.
Кроме того, механизм управления элеронами, предложенный по п.2 данного изобретения работает следующим образом.
Рулевой привод 28 при помощи рычага 27 поворачивает качалку 23 на заданный угол, а качалка 23 с одной стороны через рычаг 25 поворачивает элерон 8, а с другой - через рычаг 26 и углубление 20 кольцо 19.
Повернувшееся кольцо 19 при помощи углублений 20 и рычагов 26 поворачивает остальные три качалки 23 элеронов 8, а те, в свою очередь, при помощи рычагов 25 поворачивают остальные три элерона 8.
Таким образом, предложенная управляемая ракета, выполненная по аэродинамической схеме «утка», имеет высокие значения углов атаки (30...40 град) на всей траектории полета (активном и пассивном участках), при минимальных габаритах и массе, что обеспечивает ей высокие маневренные характеристики во всем диапазоне ее применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА | 1996 |
|
RU2094748C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288435C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| РАКЕТА | 2019 |
|
RU2722329C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2247314C1 |
| РАКЕТА | 2004 |
|
RU2270413C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
Изобретение относится к области вооружения. Ракета, выполненная по аэродинамической схеме "утка", содержит цилиндрический корпус, размещенные в нем двигательную установку с топливным зарядом, устройство управления вектором тяги двигателя, боевое снаряжение и аппаратуру системы управления, четыре неподвижных крыла с элеронами и механизмом управления ими. В тандеме с крыльями установлены четыре управляющих аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, и устройство для определения углов атаки ракеты. Устройство для определения углов атаки ракеты снабжено двумя устройствами определения истинных углов атаки, каждое из которых включает по два лежащих в одной плоскости бортовых флюгерных датчика для определения местных углов атаки, формирователь корректирующего сигнала, блок поправок в функции от числа М, датчик перегрузки, фильтр, пороговое устройство и коммутатор. При использовании изобретения повышается маневренность ракеты. 1 з.п. ф-лы, 13 ил.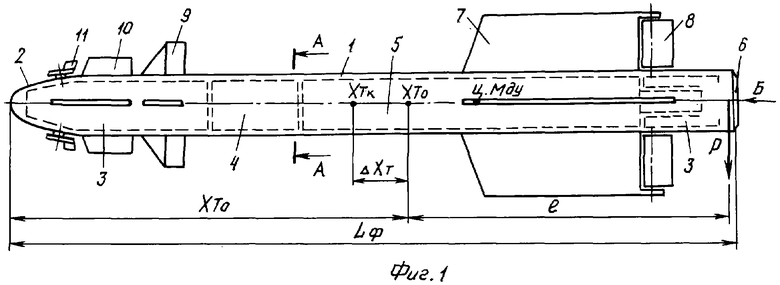
где xТ - центр масс ракеты;
хF - фокус ракеты;
Lф - длина фюзеляжа ракеты,
при этом устройство для определения углов атаки ракеты снабжено двумя устройствами определения истинных углов атаки, каждое из которых включает по два лежащих в одной плоскости бортовых флюгерных датчика для определения местных углов атаки, формирователь корректирующего сигнала, блок поправок в функции от числа М, датчик перегрузки, фильтр, пороговое устройство и коммутатор, причем датчик перегрузки расположен в плоскости, перпендикулярной плоскости измерения местных углов атаки, выходы бортовых флюгерных датчиков местных углов атаки соединены со входами коммутатора, выход которого подключен ко входу формирователя, другой вход которого соединен с выходом блока поправок в функции от числа М, выход датчика перегрузки через фильтр соединен с пороговым устройством, выход которого соединен со входом коммутатора.
| GENADY A | |||
| SOKOLOVSKY, Russian air-to-air missiles, "Military Technology", №7, 1994, c.20-23 | |||
| РАКЕТА | 1996 |
|
RU2094748C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| US 4738412 A, 19.04.1988 | |||
| US 6142412 A, 07.11.2000 | |||
| JP 2000283699 A, 13.10.2000. | |||

