Изобретение относится к транспортным средствам, а именно к вибродвижителям их передвижения с преобразованием вращательного движения в поступательное.
Известен вибродвижитель для передвижения транспортного средства (аналог), например из патента РФ №2047001, МПК F 03 G, 1995, "Способ передвижения транспортного средства и устройство для его осуществления", включающий инерционно-импульсный преобразователь и толкатель. В вибродвижителе инерционные массы совершают вращательное движение и движение в радиальном направлении, а поступательное движение транспортного средства происходит в плоскости вращения инерционных масс. При этом импульс от вращающихся инерционных масс передается только в период их движения против толкателя. Это определяет недостаток вибродвижителя, который заключаются в том, что только одна из нескольких вращающихся инерционных масс передает импульс на движение транспортного средства, что приводит к снижению КПД вибродвижителя.
Наиболее близким техническим решением (прототипом) является вибродвижитель с преобразованием вращательного движения в поступательное - см. патент РФ №2131059, МПК РОЗ G, 1999 "Движитель транспортного средства". Вибродвижитель включает инерционно-импульсный преобразователь и толкатель.
В прототипе отчасти устранен недостаток аналога путем применения системы рычагов, которая обеспечивает передачу равнодействующей центробежных сил от всех вращающихся инерционных масс на транспортное средство в направлении оси их вращения, а частота периодических движений толкателя и инерционных масс вдоль этой оси может регулироваться в любом соотношении с частотой вращения инерционных масс. Благодаря этому, хотя и косвенно, импульс на движение транспортного средства передается от всех вращающихся инерционных масс.
Однако и прототипу свойственны недостатки, заключающиеся в том, что режимы работы вибродвижителя не позволяют реализовать с его помощью поступательное движение транспортного средства в одном направлении без реверса. Движение транспортного средства возможно или с периодическими остановками, или с реверсами с большей величиной перемещения в прямом направлении (в заданном направлении движения) и с меньшей - в обратном. Величины этих перемещений зависят от соотношения частоты периодического движения толкателя и инерционных масс вдоль оси и частоты вращения инерционных масс. Поступательное движение транспортного средства в одном направлении без реверса невозможно из-за наличия жестких постоянных связей между вращающимися инерционными массами и механизмом толкателя, приводящим толкатель в движение в осевом направлении. Неравномерность движения приводит к появлению больших динамических нагрузок на узлы и детали транспортного средства, рывкам при движении, снижению надежности, КПД и ухудшению динамических характеристик транспортного средства.
Целью настоящего изобретения является создание вибродвижителя, обеспечивающего повышение равномерности движения транспортного средства, снижение динамических нагрузок на вибродвижитель и транспортное средство, улучшение динамических характеристик, повышение КПД вибродвижителя и надежности транспортного средства.
Поставленная цель достигается тем, что в вибродвижителе с преобразованием вращательного движения в поступательное, установленном на платформе транспортного средства и включающем инерционно-импульсный преобразователь с инерционными вращающимися массами и механизмом изменения радиуса их вращения и толкатель с механизмом возвратно-поступательного перемещения, механизм изменения радиуса вращения инерционных масс инерционно-импульсного преобразователя состоит из рычагов, шарнирно соединенных с одной стороны с ползунами, расположенными по обе стороны от плоскости вращения инерционных масс, установленными в направляющих, жестко закрепленных на валу с возможностью их перемещения по валу, смонтированному на подшипниковых опорах, установленных на платформе, и соединенным с приводным электродвигателем, а с другой - с инерционными массами, на которых закреплены ролики, механизм возвратно-поступательного перемещения толкателя выполнен кулисно-ползунным с двумя степенями свободы и включает двуплечую кулису, закрепленную на валу, смонтированном с приводным двигателем на платформе параллельно валу, с которым связаны инерционные вращающиеся массы инерционно-импульсного преобразователя, на кулисе установлен перемещающийся по ней камень, шарнирно связанный через шатун с осью, установленной с возможностью возвратно-поступательного горизонтального перемещения в вертикальной плоскости на стойках, закрепленных на платформе, при этом на конце оси, расположенном за втулкой со стороны инерционно-импульсного преобразователя, закреплен толкатель криволинейной формы, взаимодействующий с роликами, закрепленными на инерционных массах инерционно-импульсного преобразователя.
Изобретение поясняется чертежами, на которых изображены:
Фиг.1. Вибродвижитель с преобразованием вращательного движения в поступательное - общий вид.
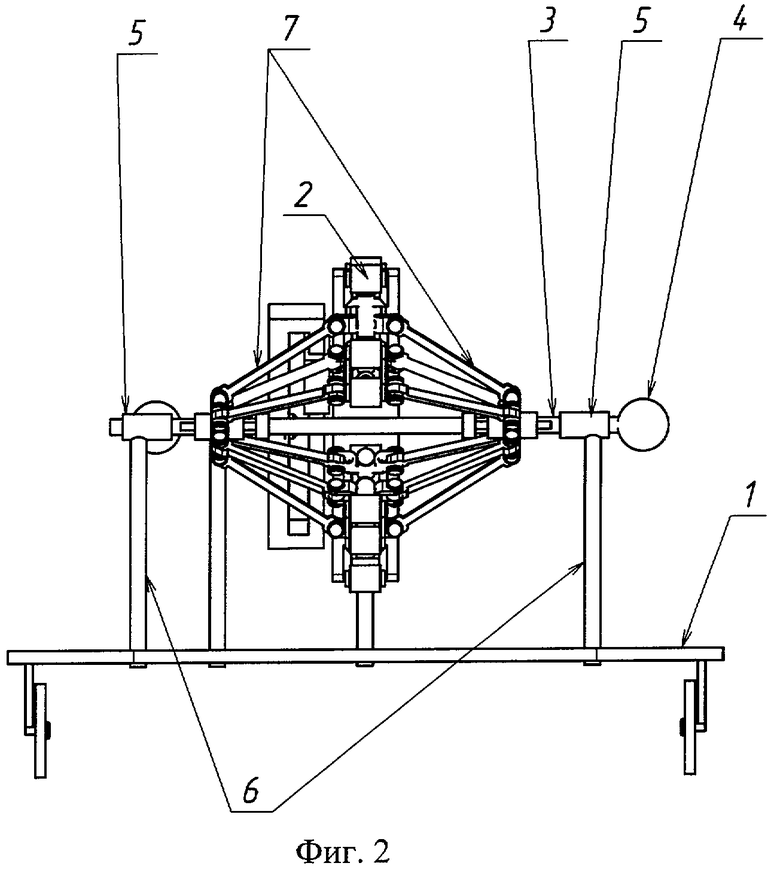
Фиг.2. Вид по стрелке А на фиг.1.
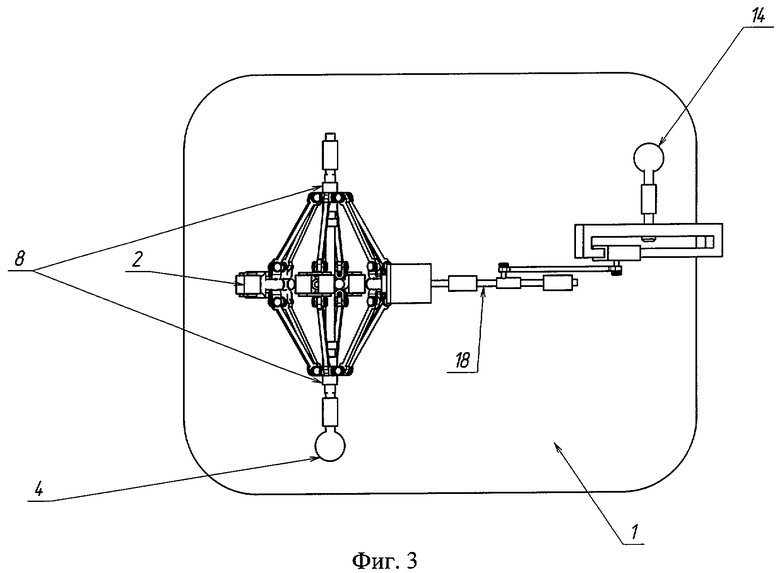
Фиг.3. Вид по стрелке Б на фиг.1.
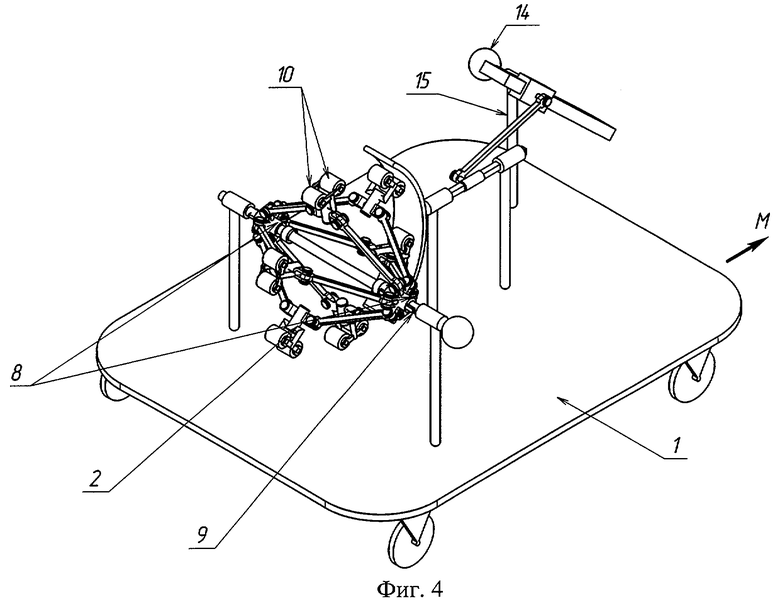
Фиг.4. Пространственное изображение вибродвижителя на платформе.
Вибродвижитель с преобразованием вращательного движения в поступательное установлен на подвижной платформе 1 транспортного средства и включает два основных устройства - инерционно-импульсный преобразователь и толкатель.
Инерционно-импульсный преобразователь предназначен для преобразования создаваемых им инерционно-силовых импульсов и передачи их на толкатель и содержит инерционные массы 2, связанные с валом 3, приводимым во вращение двигателем 4. Вал в подшипниках 5 и двигатель установлены на опорах 6, закрепленных на платформе.
Инерционные массы 2 связаны с валом 3 механизмом изменения радиуса их вращения. Механизм состоит из рычагов 7, шарнирно соединенных с одной стороны с ползунами 8, с другой - с инерционными массами 2. Ползуны 8 расположены по обе стороны вращения инерционных масс и установлены в направляющих 9, жестко закрепленных на валу 3, с возможностью осевого перемещения ползунов по валу. На инерционных массах закреплены ролики 10, непосредственно взаимодействующие с толкателем 11. Крайние положения ползунов 8 при их перемещении по направляющим 9 определяют максимальный и минимальный радиусы вращения инерционных масс 2, вращающихся вместе с валом 3.
Механизм возвратно-поступательного перемещения толкателя выполнен кулисно-ползунным с двумя степенями свободы и включает двуплечую кулису 12, закрепленную на валу 13, соединенном с двигателем 14,от которого кулисе сообщается вращательное движение. Вал с двигателем установлены на платформе 1 на опорах 15 параллельно валу 3 инерционно-импульсного преобразователя. На кулисе установлен перемещающийся по ней камень 16, шарнирно связанный через шатун 17 с осью 18. Ось установлена с возможностью возвратно-поступательного горизонтального перемещения между кулисой и инерционно-импульсным преобразователем во втулках 19 на стойках 20, закрепленных на платформе 1. На конце оси, расположенном за втулкой 19 со стороны инерционно-импульсного преобразователя, закреплен толкатель 11. Толкатель выполнен криволинейной формы для взаимодействия с роликами 10, закрепленными на инерционных массах 2. Ролики обеспечивают трение качения и уменьшение сопротивления при взаимодействии инерционных масс с толкателем.
Вибродвижитель работает следующим образом.
От двигателей 4 и 14 через механизм инерционно-импульсного преобразователя и кулисно-ползунный механизм инерционным массам 2 и кулисе 10 передаются вращательные движения.
При вращении на инерционные массы 2 и камень 16 действуют центробежные силы инерции. Под действием центробежных сил, действующих на массы 2, их радиус вращения относительно вала 3 увеличивается. При этом ползуны 8 перемещаются к центральной части вала.
При вращении кулисы на камень 16 действуют относительная и кориолисова силы инерции, которые вызывают перемещение камня по кулисе в направлении от оси вращения (от вала 13). В крайних положениях шарнира, соединяющего шатун 17 с осью 18 толкателя, между направляющими подшипниками 19 камень 16 занимает крайние положения на кулисе 12 и совершает по ней при вращении возвратно-поступательные движения.
Движение платформы 1 и соответственно транспортного средства в заданном направлении М осуществляется под действием периодического импульсного воздействия результирующей центробежных сил, действующей на толкатель 11 со стороны инерционных масс 2.
До получения импульсного воздействия при вращении кулисы 12 через камень 16, шатун 17 и ось 18 толкателю 11 сообщается поступательное движение в направлении инерционно-импульсного преобразователя. При взаимодействии толкателя с инерционными массами 2 радиус вращения этих масс уменьшается до минимального значения. При этом в период уменьшения радиуса вращения инерционных масс 2 сила инерции, действующая на камень 16 при вращении кулисы 12, выравнивается с составляющей усилия сопротивления движению камня по кулисе. Это усилие определяется суммой сил трения в паре камень-кулиса и действием на толкатель реактивных сил со стороны инерционных масс 2.
Благодаря указанному выравниванию усилий движение камня 16 по кулисе 12 практически прекращается, и кулисно-ползунный механизм перемещения толкателя с двумя степенями свободы превращается в квазикривошипно-ползунный механизм с одной степенью свободы, в котором кулиса выполняет роль кривошипа, то есть изменяется структура механизма.
После достижения минимального радиуса вращения инерционных масс 2, при котором кинематическая пара, соединяющая шатун 17 с осью 18 и толкатель 11, достигает крайнего левого положения, ближнего к валу 3 механизма инерционно-импульсного преобразователя, радиус вращения инерционных масс начинает увеличиваться, и толкатель 11 получает импульс силы на движение в обратном направлении. В процессе движения результирующая центробежных сил инерции, передающихся на толкатель от контактирующих с ним инерционных масс 2, возрастает и через толкатель передается на кулисно-ползунный механизм. Так как в механизме инерционно-импульсного преобразователя результирующая центробежных сил, действующих от инерционных масс 2 на толкатель, уравновешивается центробежными силами, действующими от масс, не взаимодействующих с толкателем, эти силы для механизма инерционно-импульсного преобразователя являются внутренними и на платформу 1 не передаются. Для кулисно-ползунного механизма результирующая центробежных сил, действующих на толкатель, является внешней и через вал 13 и опоры 15 передается на платформу 1, что приводит транспортное средство в движение в заданном направлении по стрелке М. Движение толкателя в направлении движения транспортного средства соответствует его рабочему ходу, в противоположном - холостому.
На некотором участке рабочего хода радиус вращения инерционных масс 2 достигает максимального значения, и при дальнейшем движении толкатель 11 выходит из взаимодействия (контакта) с ними и продолжает движение до крайнего правого положения по инерции с перемещением камня 16 по вращающейся кулисе 12. При этом квазикривошипно-ползунный механизм снова превращается в кулисно-ползунный с двумя степенями свободы. Движение транспортного средства после выхода толкателя из контакта с инерционными массами 2 продолжается в заданном направлении также по инерции.
После достижения крайнего правого положения толкатель совершает движение в обратном направлении (холостой ход) по описанному выше принципу, цикл работы механизмов вибродвижителя повторяется, транспортное средство получает очередной импульс на движение в заданном направлении и продолжает поступательное движение без реверса.
Для уменьшения неравномерности движения, вызываемой периодической подачей импульсов, транспортное средство может быть выполнено с двумя и более вибродвижителями, работающими с передачей импульсного воздействия в противофазе. В этом случае подача импульсов на движение транспортного средства при рабочем ходе толкателей одних вибродвижителей осуществляется при холостом ходе толкателей других вибродвижителей аналогично подаче силовых импульсов на вращение коленчатого вала от поршней цилиндров двигателя автомобиля.
Применение вибродвижителя предложенной конструкции обеспечивает движение транспортного средства без реверса с высокой степенью равномерности движения. Это позволяет снизить динамические нагрузки на вибродвижитель и транспортное средство, улучшить их динамические характеристики, повысить КПД вибродвижителя и надежность транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2007 |
|
RU2340790C1 |
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2008 |
|
RU2387567C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2604908C2 |
| Рычажный редуктор крутящего момента | 2016 |
|
RU2723657C1 |
| КРИВОШИПНО-КУЛИСНАЯ ПОРШНЕВАЯ МАШИНА | 2008 |
|
RU2378514C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2018009C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2131059C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2134795C1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
Изобретение относится к инерционным движителям транспортных средств. Вибродвижитель включает инерционно-импульсный преобразователь с инерционными вращающимися массами, механизм изменения радиуса вращения масс и толкатель с механизмом возвратно-поступательного движения. Механизм изменения радиуса вращения масс состоит из рычагов, шарнирно соединенных с ползунами, смонтированными на валу с приводным электродвигателем, установленными на платформе транспортного средства. Механизм возвратно-поступательного движения толкателя выполнен кулисно-ползунным с двумя степенями свободы и включает кулису, закрепленную на валу, смонтированном с приводным двигателем на платформе. На кулисе установлен перемещающийся по ней камень, шарнирно связанный через шатун с осью, установленной на платформе с возможностью возвратно-поступательного перемещения между инерционно-импульсным преобразователем и кулисно-ползунным механизмом. На конце оси закреплен толкатель криволинейной формы, взаимодействующий с инерционными массами инерционно-импульсного преобразователя. Технический результат - повышение равномерности движения транспортного средства, снижение динамических нагрузок, повышение КПД. 4 ил.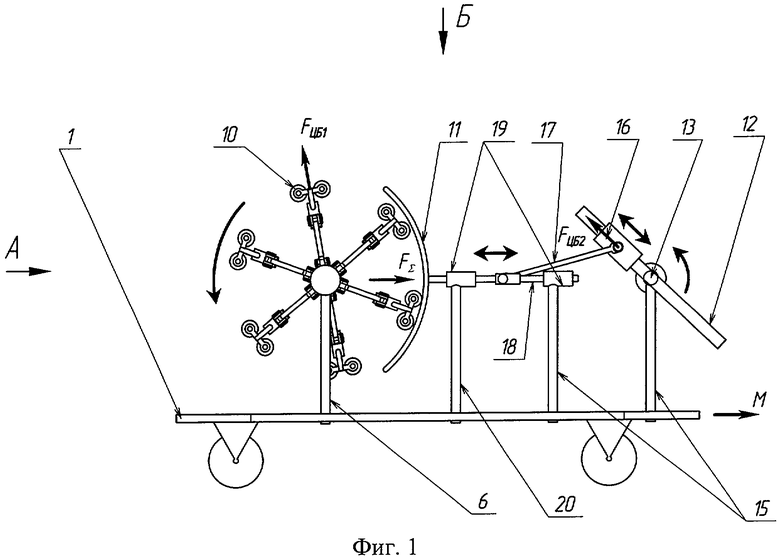
Вибродвижитель с преобразованием вращательного движения в поступательное, включающий инерционно-импульсный преобразователь с инерционными вращающимися массами и механизмом изменения радиуса их вращения и толкатель с механизмом возвратно-поступательного движения, отличающийся тем, что механизм изменения радиуса вращения инерционных масс инерционно-импульсного преобразователя состоит из рычагов, шарнирно соединенных с одной стороны с ползунами, установленными по обе стороны от плоскости вращения инерционных масс в направляющих, жестко закрепленных на валу, смонтированном в подшипниковых опорах на платформе и соединенном с приводным электродвигателем, с другой стороны рычаги соединены с инерционными массами, на которых закреплены ролики, механизм возвратно-поступательного движения толкателя выполнен кулисно-ползунным с двумя степенями свободы и включает кулису, закрепленную на валу, смонтированном с приводным двигателем на платформе параллельно валу, на котором установлены инерционные вращающиеся массы инерционно-импульсного преобразователя, на кулисе установлен перемещающийся по ней камень, шарнирно связанный через шатун с осью, установленной на платформе с возможностью возвратно-поступательного горизонтального перемещения между инерционно-импульсным преобразователем и кулисно-ползунным механизмом, при этом на конце оси закреплен толкатель криволинейной формы, взаимодействующий с инерционными массами инерционно-импульсного преобразователя через закрепленные на них ролики.
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2131059C1 |

