Изобретение относится к транспортной технике, а именно к инерционно-импульсным движителям транспортных средств.
Известны устройства для создания направленного движения, например, в патенте России N 2047001, кл. F 03 G, 1995. "Способ передвижения транспортного средства и устройства для его осуществления" и его аналоги, в которых инерционные массы совершают вращательное движение и движение попеременно в диаметральном направлении. Прямолинейное движение устройства при этом происходит в плоскости вращения инерционных масс. Импульс от вращающейся инерционной массы передается только тогда, когда она движется против толкателя.
Недостатки указанного устройства заключаются в том, что только одна инерционная масса, если их даже вращаются несколько, передает импульс для движения всей конструкции, когда движется только против толкателя. Трудно регулировать соотношение частоты вращения инерционных масс и частоты ударов толкателя.
Указанные недостатки устранены тем, что системой рычагов центробежная сила сразу всех вращающихся инерционных масс передается под углом 90o, а частота движения ползуна и инерционных масс вдоль оси может регулироваться в любом соотношении к частоте вращения инерционных масс.
На чертеже показан предлагаемый движитель транспортного средства.
Движитель содержит корпус 1, по крайней мере две инерционные массы 2, 3, рычаги 4, планку 5 серьги 6, ползун 7, кольцо 8, оси 9, фиксатор 10, вал 11, стойки 12, направляющую 13, шатун 14, кривошип 15, двигатели 16, 17.
При сообщении вращательного движения от двигателя 16 через ось 11 инерционно-импульсному преобразователю, выполненному в виде инерционной массы 2, 3, рычагов 4, серьг 6, планки 5, ползуна 7, направляющей 13, инерционная масса 2, 3 приобретает центробежную силу Fцб.
При сообщении вращательного движения от двигателя 17 кинетическая энергия передается ползуну 7 через кривошип 15, шатун 14, кольцо 8, ползун 7 всей конструкции для совершения однонаправленного требуемого прямолинейного движения в направлении M.
Рабочее движение конструкции происходит за время половины оборота кривошипа 15 с одновременным движением инерционной массы 2, 3 в направлении A. Можно считать, что при перемещении корпуса 1 в направлении M перемещаются и жестко связанные с ним оси 9 в направлении И. В данном движении (условно) ползун 7 относительно их неподвижен. При этом поворачиваются рычаги 4 и перемещают инерционную массу 2, 3 по направляющей 13 к центру вращения (стрелки A).
Холостое движение шатуна 14 от мотора 17 и возвращения в исходное положение ползуна 7, инерционной массы 2, 3 происходит под действием постоянно действующей центробежной силы и мотора 17 за другую половину оборота кривошипа 14. При этом вся конструкция продолжает двигаться по инерции в направлении стрелки M.
Взаимодействие центробежной силы Fцб и силы от двигателя 17 для движения всей конструкции производится через ползун 17.
Для устранения поворота корпуса 1 в противоположную сторону по отношению вращения вала 11 на корпусе устанавливают второй инерционно-импульсный преобразователь с вращением его в противоположном направлении от отдельного привода.
При работе одного двигателя 17 требуемого прямолинейного движения всей конструкции достичь невозможно. Законы Ньютона движения центра масс системы полностью соблюдаются.
При работе двигателя 16 вращающаяся инерционная масса 2, 3 создает одинарную центробежную силу, при движении вдоль оси 13 силу Кориолиса, что изменит силу одной или нескольких инерционных масс в конструкции (как замкнутой системе) и совершит требуемое направленное прямолинейное движение всей конструкции без воздействия внешних сил.
На этом явлении и действии основано однонаправленное движение предлагаемого движителя.
Изобретение относится к области транспортного машиностроения и ставит своей задачей повысить эффективность инерционно-импульсных движителей транспортных средств. Движитель содержит корпус транспортного средства и преобразователь вращения инерционных масс в однонаправленное линейное движение средства с приводом от двух автономных двигателей. Один из двигателей осуществляет регулируемое по частоте вращение инерционных масс, другой - возвратно-поступательное перемещение ползуна, связанного с инерционными массами системой рычагов. 1 ил.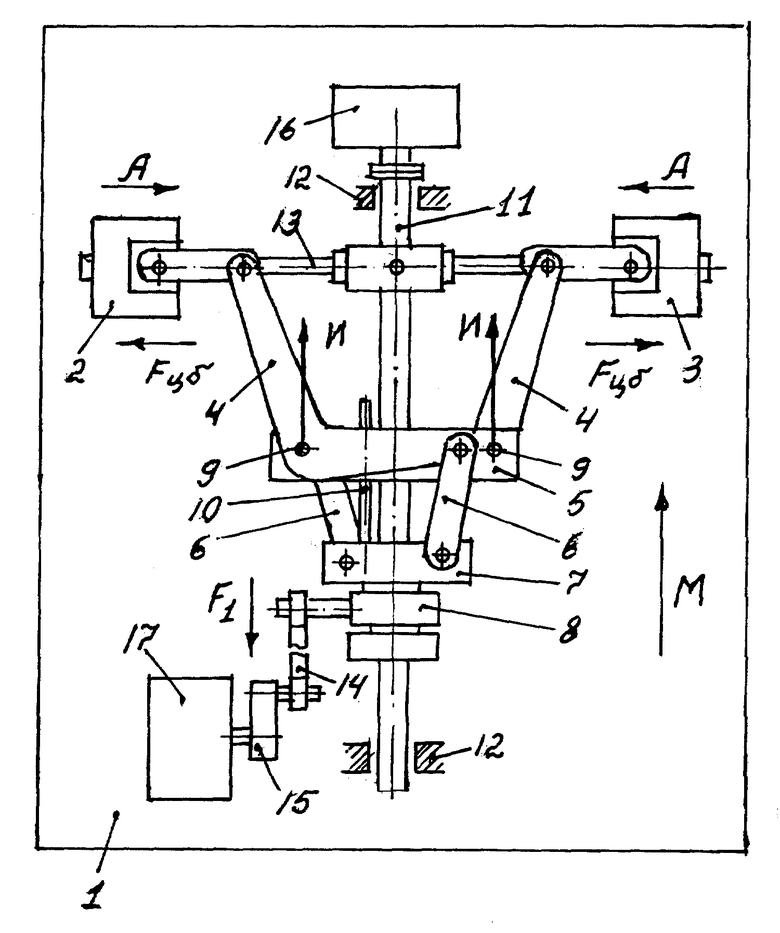
Движитель транспортного средства, содержащий корпус транспортного средства со средством связи с инерционно-импульсным преобразователем периодического воздействия в однонаправленное движение и привод, отличающийся тем, что инерционно-импульсный преобразователь выполнен в виде рычагов, передающих центробежную силу под углом 90o одновременно от всех вращающихся инерционных масс, ползуна, частота движения которого может изменяться в любом соотношении к частоте вращения инерционных масс.
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047001C1 |
| Инерционный двигатель | 1980 |
|
SU939817A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ИЗ ПРИНИМАЕМОГО СИГНАЛА СИГНАЛА, СОДЕРЖАЩЕГО СДВИГ ФАЗЫ МОДУЛИРУЮЩЕГО СИГНАЛА ОТНОСИТЕЛЬНО ФАЗЫ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕННОГО СИГНАЛА, ОБУСЛОВЛЕННЫЙ ЗАПАЗДЫВАНИЕМ ПРИНИМАЕМОГО СИГНАЛА ЗА СЧЕТ ВРЕМЕНИ РАСПРОСТРАНЕНИЯ ДО ЗЕМЛИ И ОБРАТНО, В ДОППЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ (ДАЛЬНОСТИ) И УГЛОВ МЕСТНОЙ ВЕРТИКАЛИ, ОСОБЕННО ИСПОЛЬЗУЕМЫХ ПРИ ПОЛЕТАХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОКОЛОНУЛЕВЫХ СКОРОСТЯХ | 1993 |
|
RU2078351C1 |
| US 4070855 A, 31.01.78 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
