Изобретение относится к транспортным средствам с инерционным двигателем и может быть использовано для передвижения по любой горизонтальной поверхности.
Известно описание устройства, состоящего из тележки на колесах, на которой установлены с возможностью качения и возможностью взаимодействия между собой и с тележкой два цилиндра одинакового радиуса и с равной массой, но с различными моментами инерции. Когда на цилиндры действуют равнопротивоположным импульсом, то тележка движется в одну сторону [Турышев М.В. О движении замкнутых систем, или при каких условиях не выполняется закон сохранения импульса // - «Естественные и технические науки» №3 (29), 2007, ISSN 1684-2626, с. 28-41].
Известное устройство предназначено лишь для проведения экспериментов, доказывающих возможность перемещения центра масс системы с использованием в ней вращения тел с одинаковой массой, но с разной величиной моментов инерции. Известное устройство не позволяет осуществить непрерывное быстрое перемещение тележки.
Известно описание устройства, в котором эффект перемещения центра масс системы получают за счет изменения инертности системы внутренними силами. Работа устройства осуществляется в старт-стопном режиме.
Известное устройство содержит тележку со стойкой, на которой шарнирно закреплены концы двух штанг с возможностью вращения, на противоположных концах которых расположены по два груза с возможностью симметричного смещения ортогонально штангам с остановками через полпериода вращения [Макухин С.С. Неизвестные особенности механики // - «Гравитон» №7, 2001, с. 3 и 9].
Известное устройство с точки зрения промышленной применимости сложно и неэффективно из-за остановок дважды за период, кроме того, отсутствует его конструктивная проработка.
Известен вибродвижитель с преобразованием вращательного движения в поступательное, включающий инерционно-импульсный преобразователь с инерционными вращающимися массами и механизмом изменения радиуса их вращения и толкатель с механизмом возвратно-поступательного движения, отличающийся тем, что механизм изменения радиуса вращения инерционных масс инерционно-импульсного преобразователя состоит из рычагов, шарнирно соединенных с одной стороны с ползунами, установленными по обе стороны от плоскости вращения инерционных масс в направляющих, жестко закрепленных на валу, смонтированном в подшипниковых опорах на платформе и соединенном с приводным электродвигателем, с другой стороны рычаги соединены с инерционными массами, на которых закреплены ролики, механизм возвратно-поступательного движения толкателя выполнен кулисно-ползунным с двумя степенями свободы и включает кулису, закрепленную на валу, смонтированном с приводным двигателем на платформе параллельно валу, на котором установлены инерционные вращающиеся массы инерционно-импульсного преобразователя, на кулисе установлен перемещающийся по ней камень, шарнирно связанный через шатун с осью, установленной на платформе с возможностью возвратно-поступательного горизонтального перемещения между инерционно-импульсным преобразователем и кулисно-ползунным механизмом, при этом на конце оси закреплен толкатель криволинейной формы, взаимодействующий с инерционными массами инерционно-импульсного преобразователя через закрепленные на них ролики [RU 2274574, МПК: B62D 57/00, F03G 3/00].
Недостатком известного вибродвижителя является сложность конструкции. Наличие большого числа элементов с линейным и вращательным движением, в конечном счете, приводит к низкой эффективности и низкой надежности устройства.
Задачей предлагаемого изобретения является повышение эффективности и надежности транспортного средства, а также - снижение затрат на его изготовление.
Заявляемое изобретение обеспечивает технический результат, заключающийся в том, что движение устройства в одну сторону осуществляют за счет того, что в нем непрерывным относительным вращением массы дебаланса создают центробежный импульс, который одну половину каждого периода прикладывается ко всей массе устройства для линейного перемещения, а другую половину периода центробежный импульс затрачивается на переносное вращение этой же массы дебаланса.
Технический результат достигается в предлагаемом транспортном средстве, содержащем платформу с возможностью перемещения по горизонтальной поверхности, на которой смонтирован инерционный привод с двигателем, при этом инерционный привод содержит как минимум один дебаланс с возможностью относительного и переносного вращения двигателем, как минимум один ротор с возможностью вращения и механизм, предназначенный для одностороннего вращения ротора (односторонний тормоз вращения), причем ось относительного вращения дебаланса выполнена на периферии (на краю) ротора, а на платформе закреплена неподвижная ось для переносного вращения дебаланса, на которой выполнен ротор и механизм, предназначенный для его (ротора) одностороннего вращения, который для этого содержит элементы с возможностью периодического взаимодействия с одной стороны с неподвижной осью, а с другой - с ротором, при этом все оси выполнены параллельно друг другу, а двигатель расположен на роторе.
При этом в транспортном средстве в качестве механизма для одностороннего вращения ротора может применяться муфта одностороннего хода.
При этом в транспортном средстве в качестве механизма для одностороннего вращения ротора может применяться электромагнитный или электрический тормоз с датчиком, который периодически включается и выключается по сигналам датчика в заданные моменты времени.
Такой вариант исполнения позволяет получить высокую скорость вращения дебаланса и ротора, в результате чего увеличивается скорость движения транспортного средства и его грузоподъемность.
При этом в транспортном средстве дебаланс и двигатель могут быть выполнены в виде модуля (двигатель - дебаланс), в котором дебаланс закреплен на оси двигателя.
При этом в транспортном средстве направление относительного вращения у всех дебалансов одинаковое.
В таком случае в транспортном средстве несложно разместить любое число модулей как на самом роторе, так и количество роторов на неподвижной оси.
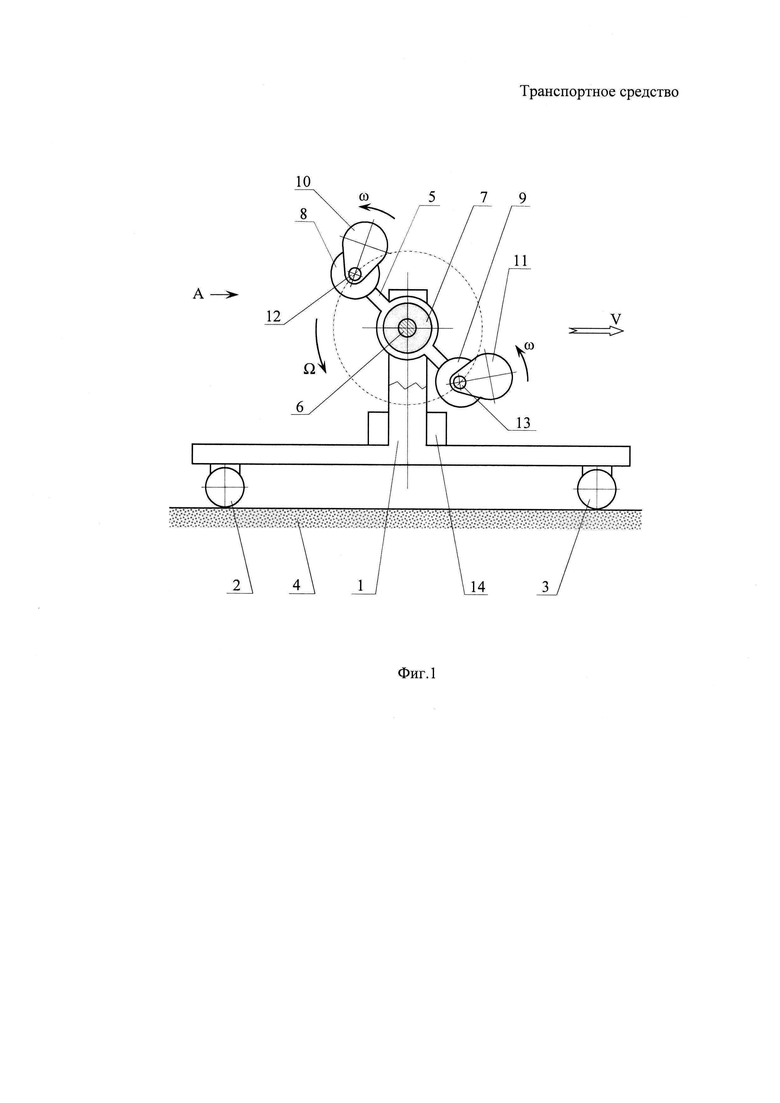
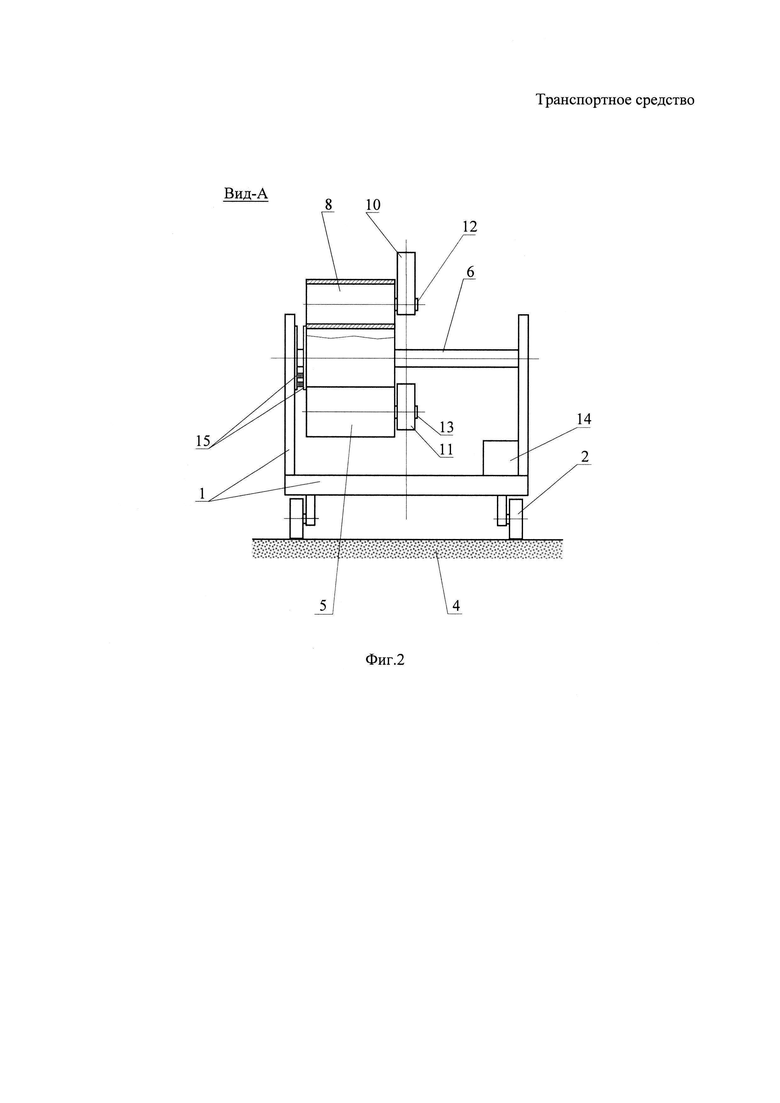
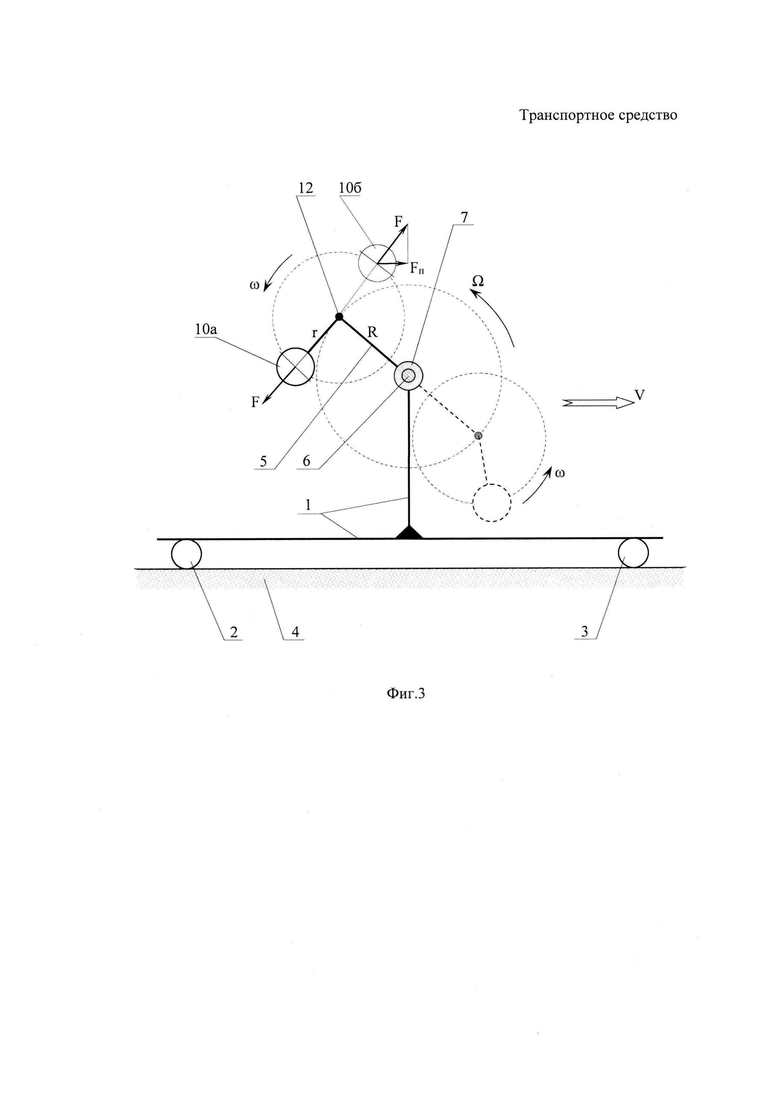
Изобретение поясняется фигурами: фиг. 1 - общий вид транспортного средства; фиг. 2 - вид на фиг. 1 по стрелке А; фиг. 3 - схема, поясняющая работу устройства.
Введены следующие обозначения: 1 - платформа; 2 и 3 - колеса; 4 - поверхность для движения; 5 - ротор; 6 - неподвижная ось; 7 - муфта одностороннего хода (односторонний тормоз вращения); 8 и 9 - электродвигатели; 10 и 11 - дебалансы; 12 и 13 - оси вращения; 14 - груз; 15 - токосъемник; 10а и 10б - мгновенное положение дебаланса 10 в произвольные моменты времени. Буквенные обозначения: Ω - направление свободного вращения ротора 5; ω - угловая скорость вращения дебаланса; F - вектор центробежной силы дебаланса; Fп - проекция вектора F на горизонтальную плоскость; R - радиус ротора 5; r - радиус относительного вращения центра масс дебаланса 10; V - направление перемещения. Штрихпунктирными линиями обозначены траектории вращений, пунктирными линиями обозначено мгновенное положение дебаланса 11 в произвольный момент времени.
Платформа 1 установлена на колесах 2 и 3 с возможностью свободного качения по опорной поверхности 4. На платформе 1 закреплена неподвижно ось 6, на которой установлен ротор 5 в форме коромысла и односторонний тормоз вращения 7, при этом тормоз 7 выполнен с возможностью взаимодействия с ротором 5 таким образом, что не препятствует его свободному вращению, когда вектор F направлен в сторону стрелки Ω и не позволяет вращаться ротору 5, когда вектор F направлен навстречу стрелке Ω. Одинаковые электродвигатели 8 и 9 закреплены симметрично на концах ротора-коромысла 5, а на их осях вращения 12 и 13 закреплены дебалансы 10 и 11 с одинаковыми массами и одинаковыми радиусами r. Электродвигатель 8 с дебалансом 10 образуют модуль №1, а электродвигатель 9 с дебалансом 11 - модуль №2. Направление вращения дебалансов 10 и 11 на осях 12 и 13 выполнено одинаковым. Груз 14 предназначен для равномерного распределения веса устройства на колеса.
Транспортное устройство работает следующим образом. Все дебалансы, расположенные в устройстве, функционируют одинаково, поэтому принцип его перемещения достаточно пояснить на примере с одним дебалансом, например 10.
После подачи электропитания на двигатель 8 дебаланс 10 начинает вращаться на оси 12 с постоянной угловой скоростью и периодом в направлении, обозначенном стрелкой ω. При этом к дебалансу вдоль радиуса r приложена центростремительная сила (не показано), противоположно которой возникает центробежная сила инерции F, которая через ось 12 приложена к ротору 5. Вектор центробежной силы F совершает круговое вращение вокруг оси 12. В моменты времени, когда вектор F оказывается направленным навстречу стрелке Ω (фиг. 3, поз. 10б), горизонтальная составляющая центробежной силы Fп приложена ко всей массе устройства по направлению стрелки V. В моменты времени, когда вектор F имеет направление по стрелке Ω (фиг. 3, поз. 10а), центробежная сила F приложена только к ротору 5, заставляя его свободно поворачиваться на некоторый угол. Таким образом, дебаланс 10 имеет определенную энергию и импульс, которые часть периода затрачиваются на движение платформы 1 по стрелке V, а другую часть периода затрачиваются на вращение только ротора 5, поэтому перемещение платформы 5 в направлении, противоположном стрелке V, практически отсутствует.
Эксперименты с устройствами по предлагаемому изобретению показали следующее:
- при одновременном использовании нескольких одинаковых модулей (двигатель - дебаланс) платформа 1 пропорционально увеличивает скорость движения и преодолевает больший угол подъема;
- при отключении одностороннего тормоза вращения 7 платформа 1 совершает только колебательные движении на одном месте;
- замедленная видеосъемка работы устройства показала, что односторонний тормоз вращения 7 помимо перераспределения импульса дебалансов одновременно синхронизирует вращение всех дебалансов нужным образом, поэтому специальных сложных схем синхронизации в предлагаемом изобретении не требуется. Последнее полностью согласуется с открытием: Абрамович И.М., Брехман И.И., Лавров Б.П., Плисе Д.А. «Явление синхронизации вращающихся тел (роторов)», диплом №333. Журнал «Открытия и изобретения», №1. 1988.
В качестве механизма для одностороннего вращения ротора может быть использовано, в том числе, изобретение: RU 2019751, МПК5 F16D 13/10.
Изобретение относится к транспортным средствам с инерционным двигателем. Транспортное средство содержит платформу с колёсами, имеющими возможность свободного вращения, на которой смонтирован инерционный привод с двигателем. Инерционный привод содержит как минимум один дебаланс с возможностью относительного и переносного вращения двигателем, как минимум один ротор с возможностью вращения и односторонний тормоз вращения ротора. Ось относительного вращения дебаланса выполнена на краю ротора, а на платформе закреплена неподвижно с ней ось, предназначенная для переносного вращения дебаланса. На оси установлен ротор и односторонний тормоз вращения, который содержит элементы с возможностью периодического взаимодействия с одной стороны с неподвижной осью, а с другой - с ротором. Все оси выполнены параллельно друг другу и горизонтально. Достигается повышение эффективности. 4 з.п. ф-лы, 3 ил.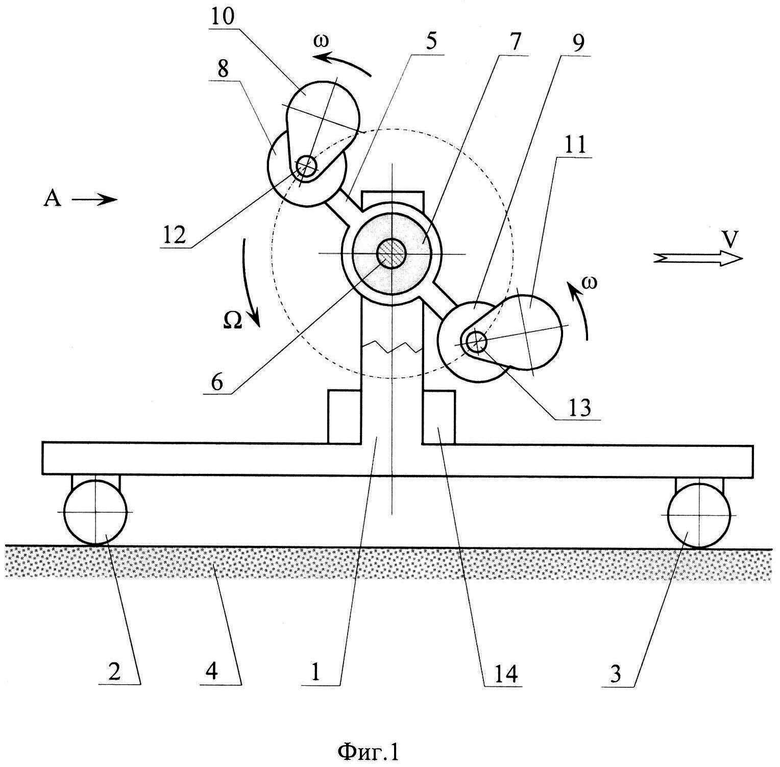
1. Транспортное средство, включающее платформу, на которой смонтирован инерционный привод с двигателем, содержащий как минимум один дебаланс с возможностью относительного и переносного вращения двигателем, как минимум один ротор с возможностью вращения и механизм, предназначенный для одностороннего вращения ротора, например односторонний тормоз вращения, причем ось относительного вращения дебаланса выполнена на краю ротора, а на оси, предназначенной для переносного вращения дебаланса, выполнен ротор и механизм, предназначенный для одностороннего вращения ротора, содержащий элементы с возможностью периодического взаимодействия с одной стороны с осью, предназначенной для переносного вращения, а с другой - с ротором, отличающееся тем, что ось, предназначенная для переносного вращения дебаланса, неподвижно закреплена с платформой, при этом все оси выполнены параллельно друг другу, преимущественно с горизонтальной ориентацией, а платформа выполнена с возможностью прямолинейного перемещения по горизонтальной поверхности, для чего снабжена, например, колесами с возможностью свободного вращения.
2. Транспортное средство по п. 1, отличающееся тем, что в качестве механизма для одностороннего вращения ротора применяется муфта одностороннего хода.
3. Транспортное средство по п. 1, отличающееся тем, что в качестве механизма для одностороннего вращения ротора применяется электромагнитный или электрический тормоз с датчиком, который периодически включается и выключается по сигналам датчика в заданные моменты времени.
4. Транспортное средство по п. 1, отличающееся тем, что дебаланс и двигатель выполнены в виде модуля двигатель-дебаланс, в котором дебаланс закреплен на оси двигателя.
5. Транспортное средство по п. 1, отличающееся тем, что направление относительного вращения у всех дебалансов одинаковое.
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2124143C1 |
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
| Силовая передача | 1986 |
|
SU1391976A1 |
| СИСТЕМА ДВУХСТУПЕНЧАТОЙ РЕМЕННОЙ ПЕРЕДАЧИ | 2004 |
|
RU2329420C1 |
| ЭЛЕКТРОГЕНЕРАТОР | 2012 |
|
RU2533385C2 |
| RU 2010149671 A, 10.06.2012 | |||
| Тормозные устройства | |||
| Справочник, под | |||
| ред | |||
| М.П | |||
| Александрова, М., "Машиностроение", 1985, стр | |||
| Автоматическая акустическая блокировка | 1921 |
|
SU205A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| СИЛОВОЙ ПРИВОД | 2012 |
|
RU2514958C2 |
| Шаговый конвейер | 1990 |
|
SU1738734A1 |

