1
РЬобретение отноеится ,к фасовочно-упаковочной технике пиш,евой. промышлсн ноети.
Известны упаковочные автоматы пищевой промышленности, у которых прерывистое движеюю роторов и конвейеров осуществляется мальтийскими меха низмами. Оии просты по конструкции, имеют малые габариты и еравнительно небольшой вес, но не позволяют произвольно выбирать соотношение .между периодами движения и покоя ведомого вала при заданном числе позиний. Это вносит определенные ограничения при составлении циклограмм автоматов, часто приводит к «еобходимости искусственного снижения их производительности, а IB ряде случаев является ирепятствием для виедрения новых прогрессивных технологических процессов, так как ири малых числах пазов работа мальти.йских механизмов характеризуется чрезмерно большими ииерционньгми нагрузками, а ири больших числах пазов - значительными потерями на холоетые ходы.
Извеетиы }-сло/кненные .коиструкции мальтийских MCxai-iK3MOB, которые иозволяют у.мецьпшть экстремальные ускорения креста, но за счет потери производительности автоматов, или дают возможность оокра.тить HOiTepn на холостые ходы, но при этом резко возрастают ииериионные нагрузки. Поэтому усложненные конструкции мальтнйски.х механизмов не находят прил1ене11ня в фасовочноупаковочных автоматах.
Наиболее совсршениым являетея фаеовочпо-упаковочный автомат, в которо.м для создания прерывистого двнжсння использ ется многозвенный .курбельный привод, содержащий ведущий вал, ведомый вал, позиционный диск с кли.иовидными иазами, рычажиый механизм п-ериодичсского иоворота позиц :0Нного диска, кулачково-кулисно- ;оромысловый механизм замыкания и размыкания позиционного диска и механизм фиксации позиционного диска кула.чково-коромыслового тппа.
Одиако в этом четырехзвен ый рычажный механизм периодического нсворота позиционного .диска не позволяет выбирать желаемые законы движения ведомого вала, поскольку его движение полиостыо определяется законом двнжения ведомого Коромысла четырехзвенного рычажного механизма. Кроме того, ввод в пазы и .вывод из. пазов двпжущего и фиксирующего сухарей, жестко соедииенных е еоответетвуюшими звеньями, осуществляется в жестко:М дииампческом режиме: в моменты мгновенных остановок коромысла в крайних положениях, в связи с чем нельзя получ1;ть плавный чтоворот и надежную фиксацию познционного диска 1на высокпх скоростях. Длительиые же оста новки ведомого коо0:мысла в крайних полол :ениях с помощью четырехзвенного рычажяого меха«изма получить также .невозможно. Все это ограинчивает повышение производительности упаковочных автоматов, так «ак при увеличении углевой скорости ведущего вала в известном приводе резко возрастают динамические удары, приводящие к поломке деталей привода и срыву технологического процесса.
Целью изобретения является снижение инерционных нагрузок, повышение точности и плавности работы на высоких .скоростя.х, а также увеличение производительности.
Это достигается тем, что механизмы периодического поворота, замыкания и размыкания и фиксации позиционного диска выполнены кулачково-кулионо-ползунными.
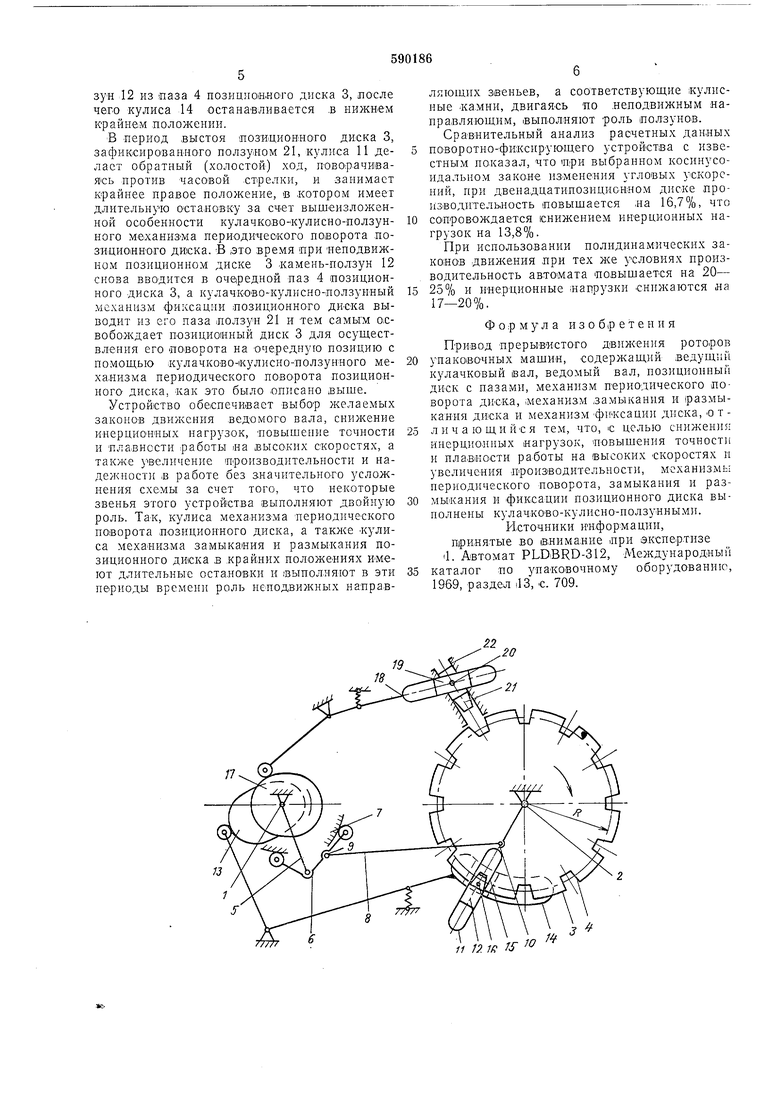
Н.а чертеже изображена кинематическая схема привода прерывистого движения роторов упаковочных .машип.
Устройство содержит ведущий вал 1, ведо.мый вал 2 с жестко посаженным на пего позидиопным дпскОМ 3, имеющим пазы 4, механизм периодического поворота позиционного диска, мехапизм замыкания и размыкания позициоппого диска, механизм фиксации позиционного диска.
Механизм ПбриодическОГа поворота позиционного диска, выполненный кулачково-кулисно-ползунным, включает кривошип 5, шатун 6 в виде двуплечего рычага, имеющего на концах ролики, которые 1взаимодействуют с профилями неподвижаюго направляющего кулачка 7, щатун 8, соединенный шарнирами 9 и 10 с шатуном 6 и кулисой 11; каменьпо лзун 12.
Механизм замыкания и размыкания позиционного диска, вынолнеиный кулачковокулисно-ползунным, имеет кулачок 13, кулису 14, камень-ползун 15, шарнирно-соединениый с камнем-ползуном 12 посредством пальца16.
Механизм фиксации позиционного диска, выполненный кулачково-кулисно-ползунпым, содержит кулачок 17, кулису 18, кулисный камень -19, шарннрно соединенный посредством пальца 20 с ползуном 21, иеподвил ную направляющую 22.
Устройство работает следующим образо м.
При непрерывном равно-мерном вращении ведущего вала -1 ведомый вал 2 с позиционным диском 3 совершает плавное вр.ащательное движение с закоиомерными периодическими остановками благодаря следующему взаимодействию механизмов. Непрерывно вращающийся кривошип 5, жестко посаженный на ведущем валу 1, передает движение щатуну 6, который через шатун 8 сообщает возвратно-вращательное движение кулисе 11, имеющей длительные остановки в крайних положениям за счет соответствующего профилирования направляющего кулачка 7. Перед началом поворота покоящегося позиционного диска 3 кулиса ill находится в правом крайнем положении тоже в состоянии
покоя, так как профиль неподвижного иаиравляющего кулачка 7, соответствую ц; й данному интервалу движения кривошипа 5, очерчен по кривой, обеспечиваюп1,ей движение шарнира 9, соединяющего шатуны 6 и 8, но дуге Окружиоети, радиус которой равен длине шатуна 8. Поэтому .шатун 8 на данно.м интервале движения 11оворачивастся вокруг шарнира 10, оставляя в покое кулису 11. В это время- кулиса 14 тоже находится в покое, занимая нижнее крайнее положеиие, что обеспечивается соответствующим профилированием жула-чка 13. Далее при неподвижной кулисе 11 кулачок 13 начинает поворачивать против часовой стрелки кулису 14, которая с помо-щью камня-ползуна 15 вводит каменьползун 12 iB паз 4 но-зи-ционного диска 3. Затем, когда камень-ползун 12 оказывается пол.ностью введенным в паз 4 позипио:нного диска 3, кулиса 14 останавливается в верхнем крайнем положении.
При остановленной кулисе И, выполняюшей в данный период времени роль неподвижной направляющей, кулачково-кулнсноползунный механизм периодического поворота позиционного диска начинает поворачивать кулису 11 по ча-со вой стрелке до тех пор, пока она не займет крайнее левое положен1 е. В этом положении кулиса 11 имеет длительную остановку, так как профиль неподвижного на-правляющего кулачка 7, соответствующий дан-но 1у интервалу движения кривошипа 5, очерчен по кривой, обеспечиваю-щей движение шарнира 9 по -дуге окружности, радиус которой равен длине 8. В связи с этим шатун 8 и на этом интервале движения -поворачивается во-круг шарнира 10, оставляя в покое кулису И. При движении кривощипа 5 -камень-ползун 12, введенный в паз 4 позиционного диска 3, повернет вместе с кулисой .11 позиционный диск 3 по- часовой стрелке на следующую позицию, т. е. на
угол , где Z - число пазов. Чтобы такое перемещение ПОЗЕЦИОИНОГО ди-ска 3 произощло, -кулиса 14 должна находиться в покое. Для этого центровой профиль кулисы 14 очерчива-ется по дуге окружности, радиус которой равеи радиусу R позиционного диска 3. Кулачок 17 спрофилирован так, что еще до момента остановки позиционного диска 3 начинает срабатывать кулачково-кулисно-ползунеый механизм фиксации и после полной остановки позиционного диска 3 при неподвижной кулисе 11 ползун 21, двигаясь по прямолинейной неподвижной .направляющей 22, оказывается полностью введенным в одип из пазов 4 позиционного диска 3. Таким образом, после полп-ой остановки позиционный диск 3 некоторое время находится в полол ении двойной фиксации, что способствует более быстрому затуханию его колебаний. Далее при неподвижной 1кулисе 11 кулиса 14 поворачивается по часовой стрелке и посредством камня-полз-уна 15 выводит камень-пол
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| Кулачково-кулисный механизм с остановками | 1988 |
|
SU1523799A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Кулисный рычажно-кулачковый механизм для воспроизведения заданных кривых | 1987 |
|
SU1441117A1 |
| КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1994 |
|
RU2091641C1 |
