Изобретение относится к области радиолокационной техники и может быть использовано при построении или модернизации вращающихся многофункциональных радиолокационных систем с электронным сканированием для обзора воздушного пространства.
Современные РЛС обзора воздушного пространства и системы управления необходимы для быстрой и точной оценки изменяющейся воздушной обстановки и получения высококачественных данных сопровождения, идентификации и оценки налета, которые нужны для эффективного и точного целеуказания.
Класс вращающихся радиолокационных систем с электронным сканированием появился в связи с попыткой решения недорогой ценой задачи обеспечения одним радиолокатором функции непрерывного обзора пространства, обнаружения целей и одновременно функции точного сопровождения обнаруженных целей на проходе (Д.А.Атингтон, П.Дж.Карилас, Дж.Д.Райт "Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства", ТИИЭР, том.73, №2, февраль, 1985, "Мир", Москва).
Для повышения темпа обновления информации в них в несколько (в 5-10) раз повысили скорость вращения антенны по азимуту, заменив сканирование лучом в вертикальной плоскости для обзора пространства на ступенчатый способ обзора.
Ступенчатый обзор - круговой обзор при неизменном угле места луча на данном обороте антенны и ступенчатом изменении угла места луча в начале каждого оборота антенны.
В качестве аналогов принимаются радиолокаторы этого класса (VSTAR-PT, LASR, FLEXAR, смотри источник, указанный выше), которые имеют одну вращающуюся ФАР с электронным управлением положением диаграммы по углу места и азимуту и используют ступенчатый способ обзора, являющийся аналогом предлагаемого способа.
В качестве ближайшего аналога взят способ обзора пространства с помощью радиолокационной системы FLEXAR (смотри источник, указанный выше, с.215-216). Он использует квазинепрерывный сигнал для обнаружения целей и сигнал с однозначной дальностью со сжатием для сопровождения цели. Использование квазинепрерывного сигнала обеспечивает радиолокатору важные положительные качества: высокую помехоустойчивость по отношению к мешающим отражениям, однозначную и высокую точность измерения радиальной скорости цели при обнаружении, что дает возможность реализовать радиолокатору автоматический режим работы.
Всем этим радиолокаторам присущ принципиальный недостаток: при отскоке диаграммы с витка обзора на угол места сопровождаемой цели для измерения ошибок сопровождения в зоне обзора образуется пропуск. Число пропусков пропорционально числу сопровождаемых целей. Непрерывность обзора пространства нарушается, что делает вероятным пропуск цели. Если радиолокатор обращается к сопровождаемой цели на каждом обороте антенны, то цели, находящиеся на азимуте сопровождаемой цели, но на других углах места, обнаружены не будут. Положение усугубляется еще тем, что при обнаружении цели не измеряется ее дальность и поэтому требуется повторное, на следующем обороте антенны, зондирование обнаруженной цели сигналом с однозначной дальностью для определения ее дальности.
Таким образом, функция непрерывного обзора пространства и обнаружения цели не выполняется.
Изобретение направлено на решение следующей задачи: построение локатора, аналогичного FLEXAR, но который обеспечивает непрерывность функции обзора пространства и обнаружения целей и одновременно функции точного сопровождения целей с высоким темпом обновления информации.
Эту задачу решает создание радиолокатора на двух быстровращающихся одномерных ФАР с электронным управлением диаграммой в плоскости угла места, со ступенчатым обзором пространства и сигналом, обеспечивающим однозначное измерение скорости и дальности цели. Одна антенна выполняет функцию обзора пространства и обнаружения целей, а вторая - измерительные функции. Ее можно использовать не только для измерения ошибок сопровождения цели, но и для обзора наземной поверхности и наблюдения метеорологической обстановки. Одномерная ФАР с управлением лучом только в одной угломестной плоскости в десятки раз дешевле двухмерной.
Таким образом, суть предлагаемого способа радиолокационного обзора пространства состоит в следующем.
Используют две антенны в различных диапазонах волн с электронным управлением диаграммой в угломестной плоскости, при этом антенну с большей длиной волны (например, 10 см) используют для обзора пространства и обнаружения целей, а антенну с более короткой длиной волны (например, 3 см) - для измерения ошибок сопровождения целей. Размещают антенны "спина к спине" на одном вращающемся основании и быстро вращают их по азимуту. Перемещают скачком диаграмму обнаружительной антенны по углу места на ее ширину в начале каждого оборота антенны, осуществляя ступенчатый обзор пространства. Излучают обнаружительной антенной квазинепрерывный сигнал, обнаруживают принимаемый отраженный от цели сигнал и запоминают в ЦВС (цифровой вычислительной системе) в момент обнаружения азимут, угол места (по известному углу места витка обзора) и радиальную скорость цели. Вычисляют угловые интервалы совпадения азимута диаграммы измерительной антенны с азимутом обнаруженной цели и скачком перемещают на этих интервалах ее диаграмму на угол места цели и, зондируя это пространство сигналом с однозначной дальностью, осуществляют с учетом измеренной при обнаружении цели ее радиальной скорости допоиск цели по углу места в пределах ширины диаграммы обнаружительной антенны, определяют дальность цели и измеряют ошибки сопровождения цели по азимуту, углу места, дальности и скорости и рассчитывают в ЦВС текущие координаты и вектор скорости цели.
Интервалы совпадения азимута диаграммы измерительной антенны с азимутом цели, вырабатываемые в ЦВС радиолокатора, на которых ЦВС управляет положением ее диаграммы по углу места, равны ширине диаграммы обнаружительной антенны при допоиске цели и ширине диаграммы измерительной антенны при сопровождении цели.
Измерение ошибок сопровождения на этих интервалах осуществляется при проходе диаграммы измерительной антенны через направление на цель известными способами: по дальности - по центру "тяжести" импульса сигнала в полустробах дальности, по азимуту - по центру "тяжести" огибающей сигнала в полустробах азимута, по углу места - по разностному сигналу парциальных диаграмм (моноимпульс), по скорости - с помощью спектранализатора БПФ (быстрое преобразование Фурье).
Желаемый технический результат достигнут. Функция непрерывного обзора пространства и обнаружения целей при одновременном сопровождении целей не нарушается; точность измерения угловых координат выше, чем у прототипа, поскольку измерительная антенна работает с меньшей длиной волны и при тех же размерах формирует более узкую диаграмму; темп обновления информации максимальный и равен скорости вращения антенны.
В качестве одномерных ФАР используют простые по конструкции, технологичные и нетрудоемкие антенные решетки с малым числом фазовращателей для электронного управления диаграммой только в плоскости угла места.
Связь антенн с приемопередающими устройствами радиолокатора осуществляется через соосный двухдиапазонный волноводный вращающийся переход.
Новизна предлагаемого способа обзора и построения радиолокатора состоит в совокупности использования всех вышеуказанных особенностей.
В этой совокупности особо плодотворной идеей, дающей радиолокатору новое качество многофункциональности, является идея объединения в одном радиолокаторе самостоятельных обнаружительного и измерительного каналов, обеспечивающих непрерывный обзор пространства и точное сопровождение обнаруженных целей с высоким темпом обновления информации.
В настоящее время изготовлен и испытан образец радиолокатора, реализующего предлагаемый способ радиолокационного обзора.
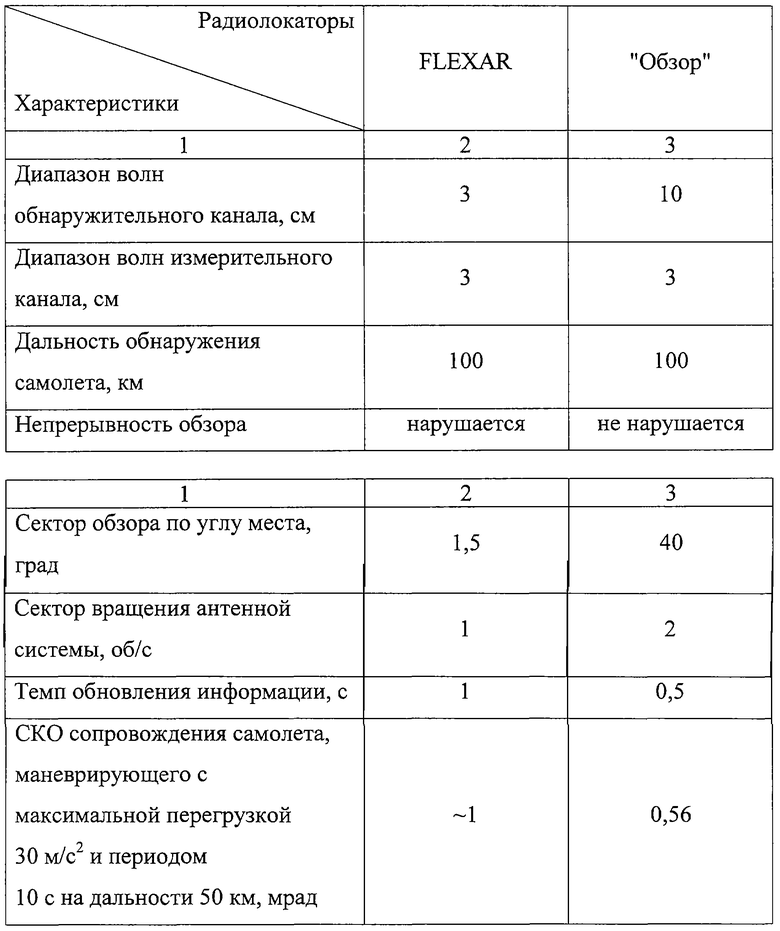
Ниже в таблице дано качественное и количественное сравнение характеристик образца радиолокатора, построенного в соответствии с предлагаемым изобретением, которому мы дадим шифр "Обзор", и прототипа FLEXAR, работающих в режиме вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2019 |
|
RU2729704C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией | 2023 |
|
RU2807331C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638550C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
Изобретение относится к области радиолокационной техники и может быть использовано при построении или модернизации вращающихся многофункциональных радиолокационных систем с электронным сканированием. Техническим результатом является непрерывный обзор пространства и обнаружение целей при одновременном их сопровождении, а также высокий темп обновления информации. Способ заключается в электронном сканировании по углу места при одновременном вращении антенны по азимуту, при этом используют две антенны в различных диапазонах волн с электронным управлением диаграммой в угломестной плоскости, при этом антенну с большей длиной волны используют для обзора пространства и обнаружения целей, а антенну с более короткой волной - для измерения ошибок сопровождения целей, размещают антенны на одном вращающемся основании, быстро и непрерывно вращают их, излучают обнаружительной антенной квазинепрерывный сигнал, обнаруживают отраженный от цели сигнал, запоминают в момент обнаружения азимут, угол места и радиальную скорость цели, вычисляют угловые интервалы совпадения азимута диаграммы измерительной антенны с азимутом обнаруженной цели, скачком перемещают на этих интервалах ее диаграмму на угол места цели и, зондируя это пространство сигналом с однозначной дальностью, осуществляют, с учетом измеренной при обнаружении цели ее радиальной скорости, допоиск цели по углу места в пределах ширины диаграммы обнаружительной антенны, определяют дальность цели и измеряют ошибки сопровождения цели по азимуту, углу места, дальности и скорости и рассчитывают текущие координаты и вектор скорости цели. 1 табл.
Способ радиолокационного обзора пространства для построения многофункционального радиолокатора, заключающийся в электронном сканировании по углу места при одновременном вращении антенны по азимуту, отличающийся тем, что используют две антенны в различных диапазонах волн с электронным управлением диаграммой в угломестной плоскости, при этом антенну с большей длиной волны используют для обзора пространства и обнаружения целей, а антенну с более короткой волной - для измерения ошибок сопровождения целей, размещают антенны на одном вращающемся основании, быстро и непрерывно вращают их, излучают обнаружительной антенной квазинепрерывный сигнал, обнаруживают отраженный от цели сигнал, запоминают в момент обнаружения азимут, угол места и радиальную скорость цели, вычисляют угловые интервалы совпадения азимута диаграммы измерительной антенны с азимутом обнаруженной цели, скачком перемещают на этих интервалах ее диаграмму на угол места цели и, зондируя это пространство сигналом с однозначной дальностью, осуществляют с учетом измеренной при обнаружении цели ее радиальной скорости допоиск цели по углу места в пределах ширины диаграммы обнаружительной антенны, определяют дальность цели и измеряют ошибки сопровождения цели по азимуту, углу места, дальности и скорости и рассчитывают текущие координаты и вектор скорости цели.
| АТИНГТОН Д.А | |||
| и др | |||
| Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства | |||
| - М.: Мир, 1985, ТИИЭР, том 73, №2, февраль, с.215-216 | |||
| Затвор для гидротехнических сооружений | 1933 |
|
SU35688A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И СПОСОБ ОПРЕДЕЛЕНИЯ И ФОРМИРОВАНИЯ ДЕЙСТВУЮЩИХ ЗАПРОСНЫХ СИГНАЛОВ | 2000 |
|
RU2208812C2 |
| ПРИСПОСОБЛЕНИЕ К ЭКСЦЕНТРИКОВОМУ ПРЕССУ ДЛЯ ПРИКРЕПЛЕНИЯ ПЕТЕЛЬ К ОЧКАМ | 1932 |
|
SU32888A1 |
| US 5864314 A, 26.01.1990 | |||
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |
| JP 4254781 A, 10.09.1990. | |||

