Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) обнаружения и (или) сопровождения целей с активными фазированными антенными решетками (АФАР) и цифровыми антенными решетками.
Обнаружить цель - это прежде всего обнаружить сигналы, отраженные от цели на фоне пассивных помех, измерить угловые координаты и дальность до нее. Для обнаружения сигнала на фоне пассивных помех необходимо разрешение по скорости, для измерения угловых координат - разрешение по угловым координатам, а для измерения дальности - разрешение по дальности. Разрешающая способность по скорости и дальности зависит от параметров сигнала. Выполнение этих задач требует больших затрат времени, причем увеличение затрат времени для решения одной задачи приводит к сокращению для решения других [1 - Д.Е. Вакман. Сложные сигналы и принцип неопределенности в радиолокации. М.: Сов. Радио, 1965 г., с. 65]. Так для точного определения дальности необходимо использовать широкополосные сигналы. При этом сечение тела функции неопределенности такого сигнала локализовано по оси времени (дальности), но распределено по оси скорости. В то же время использование протяженных во времени сигналов позволяет с большей точностью определять скорость цели, так как сечение тела функции неопределенности такого сигнала локализовано по оси скорости и распределено по оси времени (дальности) [1, с. 57, рис. 16], поэтому невозможно за счет использования одного типа зондирующего сигнала обеспечить высокое разрешение и по дальности, и по скорости (измерить параметры цели - дальность и скорость).
В известном способе [2 - Патент №2637784, RU. Способ двухэтапного радиолокационного обзора пространства / Б.Г. Беляев, П.В. Заболотный, Е.А.Нестеров, В.П. Сырский. МПК G01S 13/04. Опубл. 07.12.2017, Бюл. №34] предложен двухэтапный радиолокационный обзор пространства, которое зондируют составным сигналом, при этом первая часть составного сигнала представлена ограниченным по времени широкополосным сигналом с внутриимпульсной или фазовой модуляцией, обеспечивающим обнаружение цели и определение дальности до нее, вторая часть составного сигнала представлена разнесенными во времени частями широкополосного сигнала, выделенный сигнал второй части составного сигнала после сжатия используют для определения доплеровской скорости цели, причем дальность до цели и доплеровскую скорость цели определяют за один период зондирования.
Недостатком способа является то, что определение радиальной скорости происходит в процессе многократного обзора по изменению расстояния до цели.
Известен способ радиолокационного обзора пространства [3 - Патент №2274875, RU. Способ радиолокационного обзора пространства для построения многофункционального радиолокатора / Ю.М. Бабкин, В.А. Балагуровский, В.А. Шолохов. МПК G01S 13/04. Опубл. 20.04.2006. Бюл. №11], который заключается в электронном сканировании по углу места при одновременном вращении антенны по азимуту, при этом используют две антенны в различных диапазонах волн с электронным управлением диаграммой в угломестной плоскости, антенну с большей длиной волны используют для обзора пространства и обнаружения целей, а антенну с более короткой волной - для измерения ошибок сопровождения целей, размещают антенны на одном вращающемся основании, быстро и непрерывно вращают их, излучают антенной в режиме обнаружения квазинепрерывный сигнал, обнаруживают отраженный от цели сигнал, запоминают в момент обнаружения азимут, угол места и радиальную скорость цели, вычисляют угловые интервалы совпадения азимута диаграммы измерительной антенны с азимутом обнаруженной цели, скачком перемещают на этих интервалах ее диаграмму на угол места цели и, зондируя это пространство сигналом с однозначной дальностью, осуществляют, с учетом измеренной при обнаружении цели ее радиальной скорости, допоиск цели по углу места в пределах ширины диаграммы обнаружительной антенны, определяют дальность цели и измеряют ошибки сопровождения цели по азимуту, углу места, дальности и скорости и рассчитывают текущие координаты и вектор скорости цели.
Недостатком данного способа является низкий темп сопровождения целей, ограниченный скоростью вращения РЛС, и сложность его реализации.
Наиболее близким по технической сущности к заявляемому изобретению, прототипом, является способ [4 - Патент №2574079, RU. Способ однозначного измерения радиальной скорости цели в когерентно-импульсной радиолокационной станции/ Д.Г. Митрофанов, Г.В. Рудианов, Н.В. Силаев, В.В. Бортовик, С.А. Климов, А.А. Желнин, Н.И. Бурко, А.Ю. Сбусин. М.Кл. G01S 13/58. Опубл. 10.02.2016. Бюл. №4], в котором однозначное измерение радиальной скорости воздушной цели в когерентно-импульсной РЛС достигают на основе использования взаимной корреляционной функции (ВКФ) отраженного и опорного сигналов, при этом по числу максимумов во ВКФ устанавливают диапазон, в котором находится истинное значение доплеровской частоты отраженного сигнала, а затем определяют истинное значение радиальной скорости цели. Для проведения корреляционного анализа отраженных сигналов их сначала переводят в цифровую форму, а затем объединяют в единый синтезированный цифровой сигнал, длительность которого равна периоду повторения импульсов РЛС. После расчета ВКФ синтезированного сигнала ее огибающую пропускают через низкочастотный фильтр и подсчитывают число ее глобальных максимумов NM. Это позволяет определить диапазон частот, в котором находится истинная доплеровская частота отраженного сигнала.
Однако для однозначного измерения радиальной скорости воздушной цели в когерентно-импульсной РЛС при частотах Доплера, превышающих значение частоты повторения зондирующих сверхвысокочастотных импульсов, необходимо получить несколько максимумов огибающей ВКФ, что усложняет реализацию способа в условиях шума и является недостатком способа.
Технической проблемой, на решение которой направлено предлагаемое изобретение, является однозначное измерение дальности и радиальной скорости цели в импульсно-доплеровской РЛС.
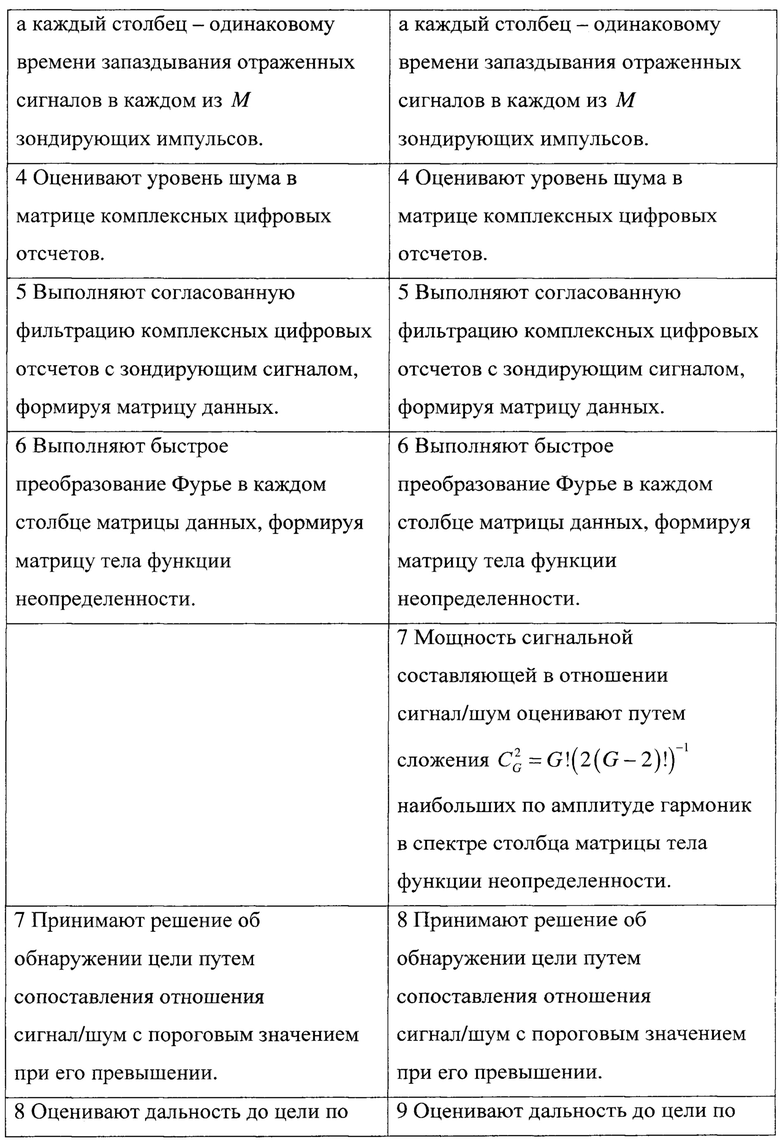
Для решения указанной технической проблемы предлагается способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией, при котором излучают зондирующие сигналы в виде последовательности М зондирующих импульсов, записывают отраженные сигналы на выходе приемного устройства в виде последовательности комплексных цифровых отсчетов, преобразуют последовательность комплексных цифровых отсчетов в матрицу комплексных цифровых отсчетов так, чтобы каждая строка соответствовала комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов, оценивают уровень шума в матрице комплексных цифровых отсчетов, выполняют согласованную фильтрацию комплексных цифровых отсчетов с зондирующим сигналом, формируя матрицу данных, выполняют быстрое преобразование Фурье в каждом столбце матрицы данных, формируя матрицу тела функции неопределенности, принимают решение об обнаружении цели путем сопоставления отношения сигнал/шум с пороговым значением при его превышении, оценивают дальность до цели по номеру столбца матрицы тела функции неопределенности, в котором принято решение об обнаружении цели.
Согласно изобретению последовательность М зондирующих импульсов формируют в виде трех или более групп импульсов с периодами следования  где g=1, 2, G, G - число групп импульсов;
где g=1, 2, G, G - число групп импульсов;  - заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения Ng выбирают таким образом, чтобы наибольший общий делитель для возможных сочетаний пар чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу, мощность сигнальной составляющей в отношении сигнал/шум оценивают путем сложения
- заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения Ng выбирают таким образом, чтобы наибольший общий делитель для возможных сочетаний пар чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу, мощность сигнальной составляющей в отношении сигнал/шум оценивают путем сложения  наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности, выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей, выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых групп импульсов, оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых отсчетов групп импульсов.
наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности, выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей, выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых групп импульсов, оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых отсчетов групп импульсов.
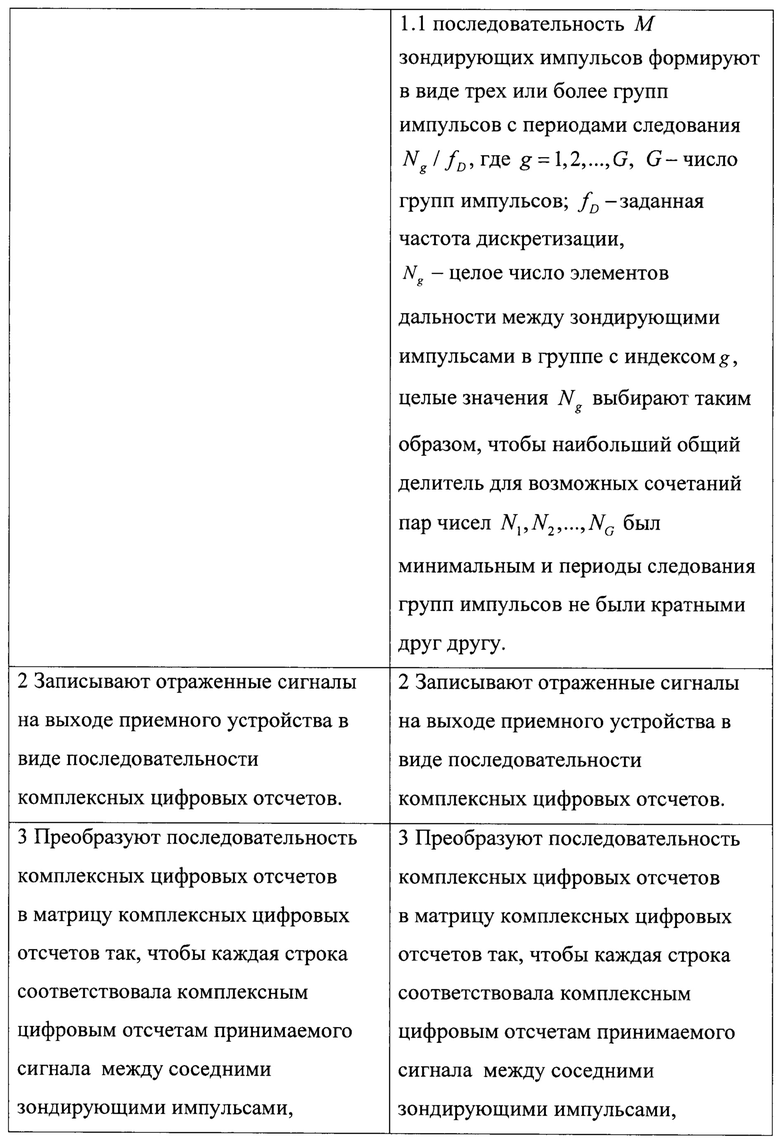
Таким образом, предлагаемый способ имеет следующие отличительные признаки и последовательность его реализации по сравнению со способом-прототипом, которые приведены в таблице 1.
Достигаемый технический результат состоит в расширении диапазона однозначного измерения радиальной скорости.
Из представленной таблицы 1 сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что введены следующие новые операции:
- мощность сигнальной составляющей в отношении сигнал/шум оценивают путем сложения  наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности;
наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности;
- выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей;
- выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых отсчетов групп импульсов;
- оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар сигналов групп импульсов; изменен режим одной операции:
- последовательность М зондирующих импульсов формируют в виде трех или более групп импульсов с периодами следования  , где g - 1, 2, …,G, G - число групп импульсов;
, где g - 1, 2, …,G, G - число групп импульсов;  - заданная частота дискретизации, N' - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения N выбирают таким образом, чтобы наибольший общий делитель чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу.
- заданная частота дискретизации, N' - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения N выбирают таким образом, чтобы наибольший общий делитель чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу.
Введение четырех новых операций и изменение режима одной операции позволяет, по сравнению со способом-прототипом, обеспечить достижение технического результата, состоящего в расширении диапазона однозначного измерения радиальной скорости.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемого технического решения, отсутствуют в известных источниках из уровня техники, что указывает на соответствие заявляемого способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
Сущность предлагаемого способа раскрывается фигурами.
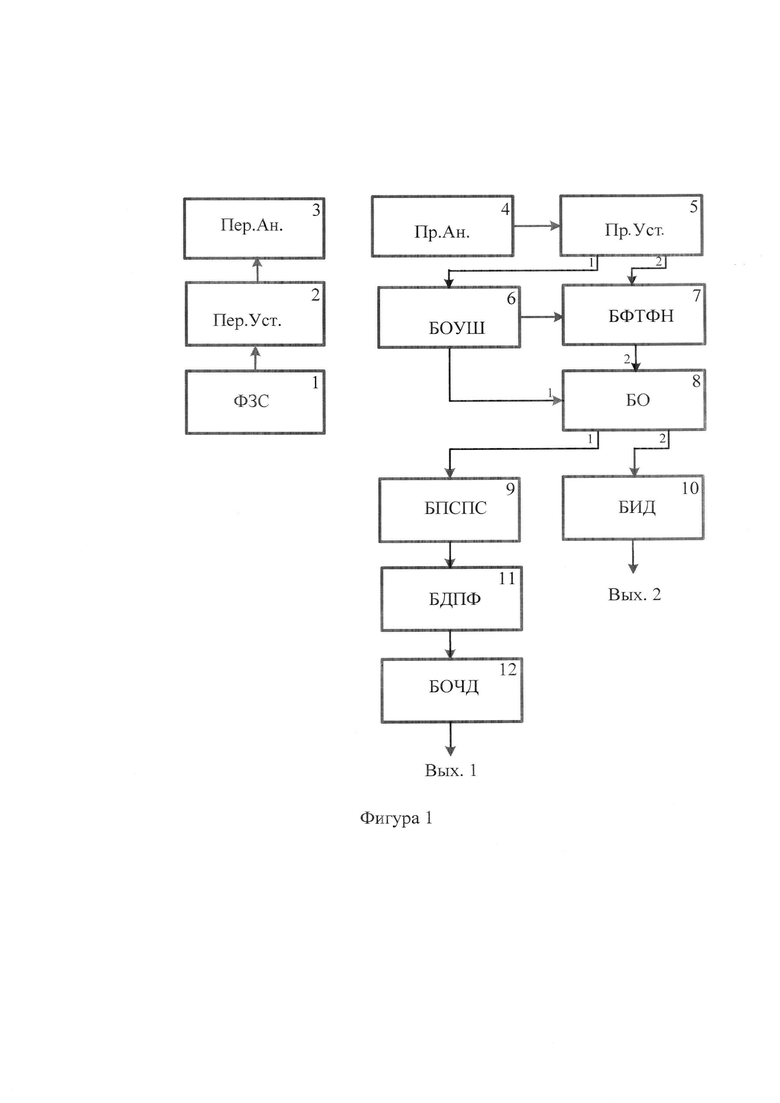
На фиг. 1 приведена упрощенная структурная схема РЛС, позволяющей реализовать предлагаемый способ.
На фиг. 2-4 приведены объемные ДН, характеризующие тело функции неопределенности (ТФН), соответствующие различным периодам следования импульсов в последовательностях из 32 импульсов в каждой.
На фиг. 5 показана сумма амплитудных спектров Фурье для временного среза (элемента разрешения по дальности), в котором присутствует объект при определении частоты Доплера в диапазоне частот биений.
На фиг. 6 показана сумма амплитудных спектров Фурье для временного среза (элемента разрешения по дальности), в котором при определении частоты Доплера в диапазоне частот биений объект отсутствует.
Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией включает следующие операции:
- излучают зондирующий сигнал в виде последовательности М зондирующих импульсов, обеспечивающих однозначную оценку дальности целей, причем последовательность М зондирующих импульсов формируют в виде трех или более групп импульсов с периодами следования  , где g=1, 2, …,G, G - число групп импульсов,
, где g=1, 2, …,G, G - число групп импульсов,  - заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения N выбирают таким образом, наибольший общий делитель чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу;
- заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения N выбирают таким образом, наибольший общий делитель чисел N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу;
- записывают отраженные сигналы на выходе приемного устройства в виде последовательности комплексных цифровых отсчетов;
- преобразуют последовательность комплексных цифровых отсчетов в матрицу комплексных цифровых отсчетов размером так, чтобы каждая строка соответствовала комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов;
- оценивают уровень шума в матрице комплексных цифровых отсчетов;
- выполняют согласованную фильтрацию комплексных цифровых отсчетов с зондирующим сигналом, формируя матрицу данных;
- выполняют быстрое преобразование Фурье в каждом столбце матрицы данных, формируя матрицу тела функции неопределенности;
- мощность сигнальной составляющей в отношении сигнал/шум оценивают путем сложения  наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности;
наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности;
- принимают решение об обнаружении цели путем сопоставления отношения сигнал/шум с пороговым значением при его превышении;
- оценивают дальность до цели по номеру столбца матрицы тела функции неопределенности, в котором принято решение об обнаружении цели;
- выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей;
- выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых отсчетов групп импульсов;
- оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых отсчетов групп импульсов.
Предлагаемый способ предназначен для использования в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой, имеющей цифровое диаграммообразование в приемном тракте.
Упрощенная структурная схема РЛС, позволяющей реализовать предлагаемый способ, приведенная на фиг. 1, включает формирователь зондирующего сигнала (ФЗС) 1, передающее устройство (Пер.Уст.) 2, вход управления которого соединен с выходом ФЗС 1, и передающую антенну (Пер.Ан.) 3, вход которой подключен к выходу Пер.Уст.2. Пер.Ан. 3 излучает зондирующие сигналы в заданном направлении.
Прием отраженных от цели сигналов производится приемной антенной (Пр.Ан.) 4, к выходу которой подключено приемное устройство (Пр.Уст.) 5. К выходам Пр.Уст.5 подключены: к первому - вход блока оценки уровня шума (БОУШ) 6, ко второму -вход блока формирования тела функции неопределенности (БФТФН) 7. Выходы БОУШ 6 и БФТФН 7 соответственно подключены к входу 1 и входу 2 блока обнаружения (БО) 8. Первый выход БО 8 соединен с входом блока перемножения сочетаний пар комплексных цифровых отсчетов (БПСПС) 9. Второй выход БО 8 соединен со входом блока измерения дальности (БИД) 10. Выход БИД 10 является выходом предлагаемого устройства (Вых. 2), посредством которого потребителю выдается информация о дальности до цели.
Выход БПСПС 9 последовательно включен с блоком дискретного преобразования Фурье (БДПФ) 11 и блоком оценки частоты Доплера (БОЧД) 12. Выход БОДЧ 12 является выходом (Вых. 1) предлагаемого устройства, с которого потребителю выдают полученную оценку частоты Доплера.
На фиг. 1 не показаны устройство синхронизации и цепи синхронизации.
Устройство, реализующее предлагаемый способ, работает следующим образом.
В ФЗС 1 генерируют высокочастотный сигнал в виде последовательности М зондирующих импульсов, для G групп импульсов с различными периодами следования  (g - 1, 2, …, G) с радиочастотным заполнением импульсов, обусловленным заданным видом модуляции зондирующего сигнала.
(g - 1, 2, …, G) с радиочастотным заполнением импульсов, обусловленным заданным видом модуляции зондирующего сигнала.
В Пер.Уст.2 усиливают входной высокочастотный сигнал, поступивший с выхода ФЗС 1, и передают на вход Пер.Ан. 3, которая концентрирует энергию усиленного высокочастотного сигнала в заданное направление.
В Пр.Ан. 4 осуществляют прием сигналов, отраженных от целей, расположенных в направлении, соответствующем ориентации сигнала Пер.Ан. 3.
Принятые сигналы в Пр. Уст.5 усиливают, переносят на промежуточную частоту и преобразуют в цифровую форму в виде последовательности  комплексных цифровых отсчетов с временным интервалом между отсчетами, обратно пропорциональным заданной частоте дискретизации
комплексных цифровых отсчетов с временным интервалом между отсчетами, обратно пропорциональным заданной частоте дискретизации  . На выходе Пр.У ст.5 формируют матрицу комплексных цифровых отсчетов размером
. На выходе Пр.У ст.5 формируют матрицу комплексных цифровых отсчетов размером  , в которой каждая строка соответствует комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов.
, в которой каждая строка соответствует комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов.
Комплексные цифровые отсчеты с первого выхода Пр. У ст.5 поступают в БОУШ 6, в котором уровень шума оценивают как среднее значение амплитуд комплексных цифровых отсчетов в течение интервала времени наблюдения, превышающего в несколько раз длительность зондирующих импульсов. Со второго выхода Пр. У ст.5 комплексные цифровые отсчеты направляют в БФТФН 7.
Значение оценки мощности шума с выхода БОУШ 6 и матрицу значений тела функции неопределенности (ТФН) с выхода БФТФН 7 передают соответственно на первый и второй входы БО 8. В БО 8 осуществляют оценку суммарной мощности спектра сигнальной составляющей в каждом столбце ТФН, находят отношение мощности спектра сигнальной составляющей к оценке мощности шума и сравнивают значение отношения пороговым значением. При превышении порогового значения номер столбца, в котором обнаружена цель, направляют в БИД 10 через второй выход БО 8, а через первый выход БО 8 на вход блока перемножения сочетаний пар сигналов (БПСПС) 9 подают комплексные значения, содержащиеся в столбце ТФН, в котором обнаружена цель.
В БИД 10 осуществляют оценку дальности до цели по известным из теории радиолокации соотношениям и полученное значение передают на выход (Вых. Д) устройства, реализующего предлагаемый способ.
В БСПСП 9 выделяют наборы значений, относящиеся к каждому из G периодов следования импульсов, перемножают выделенные наборы попарно для возможных сочетаний. Число получаемых перемножений определяется числом возможных сочетаний пар наборов отсчетов, т.е. значением биноминального коэффициента «из G по 2».
Полученные произведения отсчетов передают в БДПФ 11, в котором формируют спектры сигналов, используя оператор ДПФ вида  , используемый ниже в выражении (3).
, используемый ниже в выражении (3).
После формирования всех спектров в БОЧД12 находят искомую частоту по формуле (4) с требуемой точностью.
Полученную оценку радиальной скорости цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых отсчетов групп импульсов, выдают потребителю на выход (Вых. PC) предлагаемого устройства.
Проведем теоретическое обоснование функционирования импульсно-доплеровской РЛС следующим образом.
Известно, что для однозначной оценки дальности действия РЛС по заданному значению инструментальной дальности Rmax определяют период следования импульсов  , где с - скорость света в свободном пространстве. Цифровая обработка сигналов осуществляется после преобразования входного аналогового сигнала в цифровую форму с частотой дискретизации
, где с - скорость света в свободном пространстве. Цифровая обработка сигналов осуществляется после преобразования входного аналогового сигнала в цифровую форму с частотой дискретизации  . В результате период следования импульсов в существующих РЛС выбирают кратным частоте дискретизации так, что
. В результате период следования импульсов в существующих РЛС выбирают кратным частоте дискретизации так, что  . Здесь N - число элементов разрешения по дальности. Если цель обнаружена в некотором отсчете ТФН с номером n, то дальность до обнаруженной цели равна
. Здесь N - число элементов разрешения по дальности. Если цель обнаружена в некотором отсчете ТФН с номером n, то дальность до обнаруженной цели равна  .
.
В существующих РЛС с однозначным измерением дальности, как правило, оценка радиальной скорости осуществляется неоднозначно. Это связано с тем, что при использовании одинакового числа N временных отсчетов между импульсами период однозначного измерения частоты Доплера оценивается условием [5 - Теоретические основы радиолокации: учеб. пособие для вузов / под ред. В.Е. Дулевича. М.: Сов. радио, 1978, с. 125]
 .
.
В предлагаемом способе для расширения этого диапазона вводят несколько G периодов повторения импульсов 
При этом  . Целые значения N необходимо выбирать таким образом, чтобы периоды Tg не были кратными друг другу. Только в этом случае можно добиться наиболее существенного значения заявленного технического результата. В идеальном случае пары значений Ng и Ng,
. Целые значения N необходимо выбирать таким образом, чтобы периоды Tg не были кратными друг другу. Только в этом случае можно добиться наиболее существенного значения заявленного технического результата. В идеальном случае пары значений Ng и Ng,
должны иметь минимально возможное значение наибольшего общего делителя (НОД). Минимальное значение (НОД), равное единице, может соответствовать паре целых чисел, одно из которых является простым.
Известно, что при попарном перемножении сигналов вида  и
и возникает колебание на частоте биений
возникает колебание на частоте биений

Следовательно, период однозначного измерения радиальной скорости для данной пары сигналов увеличится и станет равным 
В то же время расширение периода однозначного измерения радиальной скорости приводит к тому, что требуется существенное увеличение затрат для поиска частоты F. Упростить решение этой проблемы возможно, если рассмотреть несколько периодов однозначного измерения радиальной скорости и из сопоставления результатов приближенного спектрального анализа получить более точную оценку частоты Доплера. Это требует рассмотрения и сопоставления друг с другом нескольких спектров произведений пар сигналов.
Поскольку при реализации способа требуется сопоставление спектров произведений пар сигналов, то для выбранного значения G число возможных парных сочетаний сигналов определяется по известной формуле 
Следует также отметить, что в перемножаемой паре сигналов достаточно, чтобы только одно число отсчетов N или Ng было простым.
Если при разложении Ng или N в виде произведения простых множителей существуют одинаковые сомножители, то расширение периода однозначного измерения радиальной скорости будет уменьшаться кратно общему полученному сомножителю (общему делителю).
Для проверки работоспособности способа были использованы результаты экспериментальных измерений параметров цели при использовании трех зондирующих последовательностей ЛЧМ сигнала радаром S-диапазона (несущая частота порядка 3 ГГц), отличающихся периодом следования зондирующих импульсов. Измеряемый объект находился на удалении порядка 120 км и представлял собой пассажирский самолет. В процессе измерений рассматривались три периода следования зондирующих импульсов: Т1=322τD, Т2=3275τD, Т3=3299τD, где τD - шаг дискретизации (здесь только 3275 не является простым числом). Параметры 7] определяют инструментальную дальность радара и выбраны близкими.
Отметим, что все периоды следования выбирались таким образом, чтобы минимизировать наибольший общий делитель пар чисел 3221, 3275, 3299 и обеспечить выполнение условий однозначного измерения дальности. В связи с этим коэффициенты пропорциональности (число элементов разрешения по дальности) выбраны из множества нечетных чисел, а два из трех коэффициентов пропорциональности соответствуют простым числам.
Первоначально каждая пачка импульсов состояла из 30 импульсов. Для каждой из пачек зондирующих импульсов формировалось тело функции неопределенности (ТФН), представленные на фиг. 2-4 соответственно.
Из анализа результатов, показанных на фиг. 2-4, следует, что при любом периоде следования после выполнения процедур согласованной фильтрации с опорным сигналом и преобразования Фурье по так называемому «медленному времени» (вдоль временной оси, образуемой зондирующими импульсами) объект обнаруживается в одном и том же элементе разрешения по дальности. В то же время параметры сигнала с одним периодом следования не позволяют получить однозначную оценку частоты Доплера, что поясняется в [5, с. 251].
В соответствии с предлагаемым способом для оценки радиальной скорости необходимо излучать зондирующие сигналы, в которых последовательность зондирующих импульсов состоит из трех групп импульсов, в каждой из которых период следования соответственно равен T1, T2, T3.
Для моделирования работы РЛС с такой последовательностью зондирующих импульсов из имеющихся экспериментальных данных были извлечены данные, относящиеся к первым десяти импульсам. В результате были сформированы временные отсчеты, соответствующие последовательности из 30-ти зондирующих импульсов, в которых использованы три заданных периода следования импульсов.
После выполнения согласованной фильтрации для каждого элемента разрешения по дальности формировался набор из десяти комплексных отсчетов, относящихся к одному из периодов следования между импульсами зондирующей последовательности. Эти отсчеты обозначим s1,s2 и s3 соответственно.
Если в просматриваемом элементе разрешения по дальности присутствует цель с частотой доплеровского смещения F, то с точностью до постоянного множителя можно считать, что

где  - амплитуда и фаза сигнальной составляющей; Т; - период следования импульсов i=1, 2, 3; m=1, 2, …, М; М=10 номер импульса в группе импульсов с периодом следования Ti;
- амплитуда и фаза сигнальной составляющей; Т; - период следования импульсов i=1, 2, 3; m=1, 2, …, М; М=10 номер импульса в группе импульсов с периодом следования Ti;
ξi,m - комплексная амплитуда шума.
Для реализации предлагаемого способа сначала необходимо получить наборы сигналов, по формулам

где  * - символ комплексного сопряжения.
* - символ комплексного сопряжения.
В соответствии с выражением (2) амплитуда первого слагаемого, которое содержит только детерминированную часть сигнальной составляющей, переносится в низкочастотную область. Эту частотную область можно назвать областью биений, поскольку формируемые в данной области гармоники соответствуют разностям двух частот в перемножаемых сигналах. Вклад остальных слагаемых в выражении (2) зависит от уровня шумов и соответствует высокочастотной области.
Поскольку периоды Ti и Ti' в выражении (2) не совпадают, но достаточно близки, то, выполняя дискретное преобразование Фурье для каждого из набора данных, получим, что максимальные отклики сигналов будут у них достаточно близки. Амплитуда спектра будет тем выше, чем ближе частота дискретного спектра к частоте Доплера. В связи с этим поиск частоты Доплера из имеющихся наборов данных  может осуществляться следующим образом.
может осуществляться следующим образом.
Сначала выполним преобразования Фурье по формулам:

где Wm - весовые коэффициенты, которые влияют на боковые лепестки спектра (например, при Wm=1 лепестки максимальны, но и главный лепесток спектра является наиболее узким).
Выбор весовых коэффициентов позволяет уменьшить влияние шума на оценку радиальной скорости за счет снижения уровня боковых лепестков спектра.
Оценку искомой частоты Доплера можно найти по формуле

Поскольку точность оценки будет зависеть от шага по частоте, то выполнение преобразования Фурье может осуществляться в два этапа. Сначала с грубым шагом оценивается частотная область, в которой расположены максимальные гармоники всех трех спектров. А затем уточняют поведение функций  в соответствующей более узкой частотной области.
в соответствующей более узкой частотной области.
На фиг. 5 представлена частотная зависимость суммы амплитуд гармоник в диапазоне от -20 кГц до 20 кГц. Вертикальные линии определяют положение локальных экстремумов. В соответствии с [5, с. 251] для рассматриваемого примера при использовании последовательности зондирующих импульсов с одним (наименьшим) периодом диапазон однозначного измерения частоты Доплера соответствует ±400 Гц (диапазон однозначного измерения радиальной скорости ±20 м/с). Это означает, что в рассматриваемом примере диапазон измерения радиальной скорости увеличен в 100 раз.
Максимум полученной спектральной зависимости соответствует частоте F=4810 Гц. В рассматриваемом диапазоне частот этой оценке частоты Доплера соответствует радиальная скорость 240 м/с (865 км/ч - соответствует диапазону скоростей пассажирского самолета от 500 до 900 км/ч).
Превышение амплитуды максимальной гармоники над остальными гармониками может быть ниже порогового уровня, заданного критерием обнаружения. Это обусловлено тем, что, вводя различные периоды повторения импульсов, невозможно получить результирующий спектр, в котором энергия отраженного сигнала цели будет соответствовать единственной гармонике. Решение о наличии цели во временном срезе можно принимать в том случае, если отношение суммы энергий нескольких максимальных гармоник спектров Фурье и энергии шума удовлетворяет заданному критерию, например, критерию Найквиста.
На фиг. 6 представлены данные суммы спектральных характеристик для временного среза, в котором цель отсутствовала. Отсутствие ярко выраженного экстремума и большое число соизмеримых максимумов с общим уровнем, приближающимся к уровню шума на ТФН, позволяют отбросить этот временной срез при формировании отметок целей.
Полученные результаты подтверждают, что реализация предлагаемого способа обеспечивает расширение диапазона однозначного измерения радиальной скорости.
Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией является вполне реализуемым, поскольку может быть осуществлен на существующей элементной базе, а также предполагает использование радиолокационной информации, получаемой используемыми в настоящее время РЛС. Возможность реализации предложенного способа обеспечивает ему критерий патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| Способ определения параметров движения высокоскоростного воздушного объекта | 2023 |
|
RU2807316C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой | 2021 |
|
RU2760409C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2713380C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях обнаружения и сопровождения целей с активными фазированными антенными решетками и цифровыми антенными решетками. Техническим результатом изобретения является расширение диапазона однозначного измерения радиальной скорости. В заявленном способе излучают последовательность М зондирующих импульсов, которую формируют в виде трех или более групп импульсов с периодами следования  где g=1, 2, …,G, G - число групп импульсов; fD - заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения Ng выбирают таким образом, чтобы наибольший общий делитель чисел для возможных сочетаний пар N1, N2, …, NG был минимальным. Записывают сигналы на выходе приемного устройства в виде последовательности комплексных цифровых отсчетов, преобразуют ее в матрицу комплексных цифровых отсчетов так, чтобы каждая строка соответствовала комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов. Оценивают уровень шума в матрице комплексных цифровых отсчетов. Выполняют согласованную фильтрацию комплексных цифровых отсчетов с зондирующим сигналом, формируя матрицу данных, выполняют быстрое преобразование Фурье в каждом столбце матрицы данных, формируя матрицу тела функции неопределенности. Определяют мощность сигнальной составляющей в отношении сигнал/шум и принимают решение об обнаружении цели путем сравнения с пороговым значением при его превышении. Оценивают дальность до цели и радиальную скорость цели по частоте Доплера. 6 ил., 1 табл.
где g=1, 2, …,G, G - число групп импульсов; fD - заданная частота дискретизации, Ng - целое число элементов дальности между зондирующими импульсами в группе с индексом g, целые значения Ng выбирают таким образом, чтобы наибольший общий делитель чисел для возможных сочетаний пар N1, N2, …, NG был минимальным. Записывают сигналы на выходе приемного устройства в виде последовательности комплексных цифровых отсчетов, преобразуют ее в матрицу комплексных цифровых отсчетов так, чтобы каждая строка соответствовала комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов. Оценивают уровень шума в матрице комплексных цифровых отсчетов. Выполняют согласованную фильтрацию комплексных цифровых отсчетов с зондирующим сигналом, формируя матрицу данных, выполняют быстрое преобразование Фурье в каждом столбце матрицы данных, формируя матрицу тела функции неопределенности. Определяют мощность сигнальной составляющей в отношении сигнал/шум и принимают решение об обнаружении цели путем сравнения с пороговым значением при его превышении. Оценивают дальность до цели и радиальную скорость цели по частоте Доплера. 6 ил., 1 табл.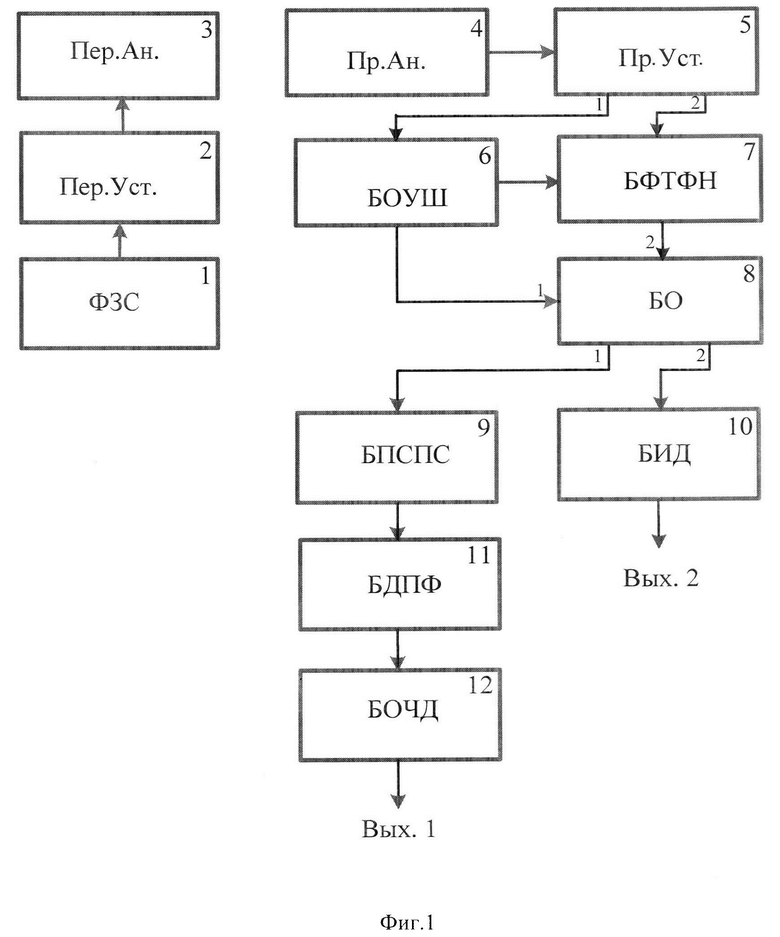
Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией, при котором излучают зондирующие сигналы в виде последовательности М зондирующих импульсов, записывают отраженные сигналы на выходе приемного устройства в виде последовательности комплексных цифровых отсчетов, преобразуют последовательность комплексных цифровых отсчетов в матрицу комплексных цифровых отсчетов так, чтобы каждая строка соответствовала комплексным цифровым отсчетам принимаемого сигнала между соседними зондирующими импульсами, а каждый столбец - одинаковому времени запаздывания отраженных сигналов в каждом из М зондирующих импульсов, оценивают уровень шума в матрице комплексных цифровых отсчетов, выполняют согласованную фильтрацию комплексных цифровых отсчетов с зондирующим сигналом, формируя матрицу данных, выполняют быстрое преобразование Фурье в каждом столбце матрицы данных, формируя матрицу тела функции неопределенности, принимают решение об обнаружении цели путем сопоставления отношения сигнал/шум с пороговым значением при его превышении, оценивают дальность до цели по номеру столбца матрицы тела функции неопределенности, в котором принято решение об обнаружении цели, отличающийся тем, что последовательность М зондирующих импульсов формируют в виде трех или более групп импульсов с периодами следования  , где g=1, 2, …, G, G - число групп импульсов;
, где g=1, 2, …, G, G - число групп импульсов;
 - заданная частота дискретизации,
- заданная частота дискретизации,
N - целое число элементов дальности между зондирующими импульсами в группе с индексом g,
целые значения Ng выбирают таким образом, чтобы наибольший общий делитель чисел для возможных сочетаний пар N1, N2, …, NG был минимальным и периоды следования групп импульсов не были кратными друг другу, мощность сигнальной составляющей в отношении сигнал/шум оценивают путем сложения  наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности, выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей, выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых групп импульсов, оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых групп импульсов.
наибольших по амплитуде гармоник в спектре столбца матрицы тела функции неопределенности, выполняют перемножение сочетаний пар комплексных цифровых отсчетов групп импульсов с комплексным сопряжением одного из сомножителей, выполняют дискретное преобразование Фурье полученных произведений сочетаний пар комплексных цифровых групп импульсов, оценивают радиальную скорость цели по частоте Доплера, соответствующей максимуму суммы амплитуд спектров Фурье произведений сочетаний пар комплексных цифровых групп импульсов.
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| Способ двухэтапного радиолокационного обзора пространства (варианты) | 2016 |
|
RU2637784C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ С ФАЗОВОЙ СЕЛЕКЦИЕЙ ПО ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2360265C1 |
| US 4225863 A, 30.09.1980 | |||
| WO 2013147948 A3, 21.11.2013 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЦИФРОВОГО СЖАТИЯ И ВОССТАНОВЛЕНИЯ СИГНАЛОВ | 2011 |
|
RU2472287C1 |

