Изобретение относится к информационно-управляющим комплексам, в которых для обмена данными между пунктом управления (ПУ) и периферийными контролируемыми пунктами (КП) используется временное разделение сигналов в линиях связи ПУ-КП. В информационных сообщениях от КП в ПУ передаются сигналы состояния контролируемых объектов, а от ПУ в КП - команды управления исполнительными механизмами. Команды управления представляются в виде координат - позиционных (распределительных) кодов номера группы объектов управления, номера объектов управления в группе и вида команды управления "включить" и "отключить". Для повышения достоверности команда управления передается дважды - прямым и инверсным последовательными кодами указанных координат. Если разделить все объекты управления на "n" групп по "р" объектов в каждой, возможно управление "n-р" двухпозиционными объектами одного КП. Сигналы состояния (положения) контролируемых объектов передают от КП в ПУ позиционным кодом. Для повышения достоверности данные передаются дважды - прямым и инверсным кодами.
В частности, предлагаемое устройство предназначено для управления ответственными объектами - моторными приводами разъединителей контактной сети электрифицированных участков железных дорог, и передачи в ПУ сигналов состояния моторных приводов. В устройстве должны выполняться требования максимальной достоверности и надежности при выполнении команды, а также учитываться рассредоточение на сотни и тысячи метров по зоне станций и прилегающей территории исполнительных механизмов - моторных приводов, повышенный уровень помех от высоковольтной контактной сети и цепей питания моторных приводов. Удаленность объектов требует использования одних и тех же цепей для управления и получения сигналов состояния моторных приводов, общих для всех моторных приводов шин "включить" и "отключить" и лишь по одной индивидуальной шине для выбора моторного привода, принятия специальных мер по предотвращению возникновения "обходных" цепей по общим шинам.
Для таких объектов обязательным является дублирование блоков дистанционной, "автоматической" подачи команды от ПУ блоками местного, "ручного" управления моторными приводами оператором (диспетчером), находящимся на КП.
Известно устройство для приема команд телеуправления (авторское свидетельство № 1513497, G 08 С 19/28, М.Л.Портнов, бюллетень №37, 07.10.89 г.), в котором для расширения функциональных возможностей, наряду с дистанционной, "автоматической" подачей команд управления от ПУ, реализуется "ручная" подача команд оператором, находящимся на КП, и визуализация подаваемых оператором команд.
В известном устройстве реализована местная сигнализация подаваемых команд, но отсутствует возможность формирования сигналов состояния объектов с использованием цепей подачи команд управления и передача полученной информации в ПУ, ограничено число объектов управления, недостаточна достоверность и надежность подаваемой команды управления.
Указанные недостатки делают невозможным использование устройства для управления моторными приводами разъединителей контактной сети.
Наиболее близким к предложенному является устройство для приема команд телеуправления (авторское свидетельство № 1441436, G 08 С 19/28, М.Л.Портнов и др., бюллетень № 44, 30.11.88 г.), которое содержит блок приема, блок элементов памяти, содержащий узлы памяти сигналов координат объектов управления - номеров групп, номеров объектов в группе и вида команды управления "включить" и "отключить", блок усилителей сигналов координат, блок реле, содержащий индивидуальные реле для каждого сигнала координат, блок разделительных диодов, первый генератор тактовых импульсов, первый преобразователь параллельного кода в последовательный, распределитель, компаратор, блок кнопок управления, блок анализа, первый и второй элементы задержки, первый, второй и третий элементы ИЛИ, первый элемент И, блок элементов И, первый и второй счетчики, у блока приема соединены: первый вход - с выходом первого генератора тактовых импульсов, второй вход - с линией связи, первый информационный выход - с первым информационным входом блока элементов памяти, подключенным вторым входом к выходу первого генератора тактовых импульсов через первый элемент И, подключенный другим входом к выходу "1" распределителя, группа информационных выходов узлов элементов памяти номера группы и номера объекта управления в группе соединена с соответствующими входами узлов усилителей сигналов номеров групп и номеров объектов управления в группе, а группа информационных выходов узла элементов памяти сигналов вида команды управления блока элементов памяти подключена к группе входов блока элементов И, у которого группа выходов соединена с соответствующими входами усилителей блока усилителей, выходы блока усилителей через первые диоды блока разделительных диодов подключены к первым индивидуальным входам обмоток соответствующих реле блока реле, у каждого реле индивидуальный вход обмотки соединен также с анодом защитного диода, катоды всех защитных диодов каждой группы объединены и соединены с объединенными вторыми выводами обмоток реле соответствующих групп, выходы блока усилителей соединены также с группой информационных входов первого преобразователя параллельного кода в последовательный, у которого группа адресных входов соединена с группой основных выходов первого счетчика, а выход последовательного кода - со вторым входом компаратора, выход которого соединен со вторым управляющим входом первого триггера, у которого соединены: третий тактовый вход через первый элемент задержки с выходом первого генератора тактовых импульсов и первым тактовым входом первого счетчика, четвертый (R) вход - с выходом третьего элемента ИЛИ, соединенного входами с нулевым, первым, третьим и пятым выходами распределителя.
В устройство-прототип введены узлы контроля достоверности выполняемой команды, увеличено возможное число объектов управления, повышена надежность цепей управления и диагностики.
Недостатком устройства-прототипа является невозможность совмещения цепей контроля состояния объектов и подачи рабочего напряжения на выбранный исполнительный механизм, отсутствие дистанционной передачи в ПУ информации о состоянии оборудования и результатах диагностики работоспособности аппаратуры. В устройстве-прототипе отсутствует диагностика исправности цепей контроля и работоспособности цепей связи с объектами управления, что снижает уровень достоверности выполняемых команд управления.
Низкая достоверность и информативность, а также ограниченные функциональные возможности делают невозможным использование устройства-прототипа для управления ответственными объектами - моторными приводами разъединителей контактной сети.
Сущностью и целью изобретения является повышение достоверности, расширение информационных и функциональных возможностей устройства для обеспечения возможности его использования в системах управления электрифицированными участками железных дорог.
Цель достигается тем, что в устройство управления моторными приводами разъединителей контактной сети дополнительно введен узел сигнализации состояния моторных приводов разъединителей контактной сети, совмещенный с цепью подачи рабочего напряжения на выбранный моторный привод. Цепь сигнализации включает индивидуальные двухцветные светодиодные индикаторы для местного отображения информации и оптроны для формирования сигналов с целью их передачи на ПУ по линии связи дистанционного приема команд управления. Блоки сигнализации и контроля реализованы так, что состояние каждого моторного привода отображается корреляционным биимпульсным кодом - парой сигналов "10" при включенном и "01" - при отключенном состоянии моторного привода. Одновременно с кодированием состояния моторного привода проводится диагностика работоспособности аппаратуры и цепей связи устройства с территориально рассредоточенными моторными приводами, в результате чего корреляционный биимпульсный код преобразуется в условно корреляционный. Условно корреляционный биимпульсный код содержит, кроме двух указанных выше, две дополнительные кодовые комбинации - "11" - для фиксации замыкания между общими для всех моторных приводов шинами "включить" и "отключить" или индивидуальными шинами разных моторных приводов, и "00" - для фиксации разрывов диагностируемых цепей связи моторных приводов с устройством. Из комбинаций условно корреляционных кодов для всех моторных приводов формируется информационное сообщение, передаваемое в ПУ. Анализ сообщения в ПУ позволяет не только зафиксировать неисправность, но и идентифицировать ее вид и место повреждения. Этим обеспечивается повышение информационных и функциональных возможностей предлагаемого устройства. Для повышения помехозащищенности цепей контроля и сигнализации в устройство введен формирователь контрольных сигналов, частота которых (примерно равная 2000 Гц) намного превышает наиболее вероятный частотный диапазон сигналов помех от контактной сети и цепей питания моторных приводов. Подавление помех, проникающих в цепи контроля и сигнализации, обеспечивается фильтром верхних частот. Контрольные сигналы формируются в виде периодических парафазных сигналов и поступают в рабочие цепи через разделительные трансформаторы, чем изолируются цепи контроля и управления. С помощью разделительных трансформаторов и изолирующих диодов предотвращается образование "обходных" цепей по общим для всех моторных приводов шинам "включить" и "отключить" и повышается достоверность получаемой информации и надежность работы блоков устройства.
Реализация указанных характеристик обеспечивает повышение достоверности, расширяет функциональные и информационные возможности предложенного устройства по сравнению с известными и позволяет применять его в системах управления электрифицированными участками железных дорог и другими ответственными объектами.
На фиг.1...7 приведены схемы блоков предложенного устройства.
На фиг.1 приведена общая структурная схема, иллюстрирующая соединения между блоками приема и обработки информации 1; разделительных диодов 2; реле 3; кнопок управления 4; анализа 5; сигнализации и контроля 6. Блоки 1...6 изображены в виде прямоугольников, слева показаны входные цепи, справа - выходы блока. Утолщенными линиями показаны группы входных или выходных сигналов. Вход 4 блока 1 является первым входом устройства и соединен с линией связи КП-ПУ, седьмой вход блока 5 является входом "земля" устройства и подключен к внешнему контуру заземления. К выходам 3 и 4 блока 6 подключается рабочее напряжение моторных приводов (например, переменное напряжение 220 В). Остальные связи между блоками являются внутренними для предложенного устройства.
На фиг.2 приведена схема блока 1 приема и обработки информации. В блок 1 включен блок 7 приема, воспринимающий команды управления из линии связи, узел 8 памяти сигналов состояния моторных приводов и диагностических сигналов, первый генератор 9 тактовых импульсов, синхронизирующий работу блока 7 и формирователя 10 сигналов передачи, группа информационных входов которого соединена с группой выходных сигналов блока 8. Информационные сигналы 7 воспринимаются блоком 11 элементов памяти. Для формирования сигналов управления используются усилители блока 12 усилителей. В соответствии со структурой компонентов (координат) поступающей команды управления блок 12 включает узлы 13, 14, 15, состоящие из групп индивидуальных усилителей сигналов номеров групп, номеров объектов управления в группе и вида команды управления "включить" и "отключить" соответственно. Узлы 13, 14, 15 формируют сигналы для групп шин 16, 17, 18, соединенных с группами 1, 2, 3 выходов блока 1. Обработка принятых команд реализуется первым 19 и вторым 20 счетчиками, первым 21 преобразователем параллельного кода в последовательный. На информационные (И) входы 21 поданы сигналы с шин 16, 17, 18, а на группу адресных (А) входов - сигналы от основных (1...К) разрядов счетчика 19, которые также поданы на адресные входы второго 22 преобразователя параллельного кода в последовательный. Работа устройства разделяется на этапы, границы которых определяются с помощью мультиплексора 23, на группу адресных (А) входов которого поданы сигналы от счетчика 20. Нулевой (ИО) информационный вход 23 соединен со вторым выходом 7, на котором образуется сигнал "1" при приеме команды управления, информационные входы И1, И2, И4 мультиплексора 23 объединены и соединены с дополнительным (К+1) выходом счетчика 19. Адресные входы 23 объединены с соответствующими адресными (А) входами распределителя 24, который формирует сигнал "1" на одном из выходов "0"..."6" в соответствии с кодовой комбинацией сигналов на адресных входах. Сигнал на выбранном выходе 24 соответствует величине напряжения "U" источника питания (не показанного на фигурах), поданному на вход управления (У) распределителя 24, и соответствует принятому в устройстве логическому сигналу "1". Для контроля достоверности принятой блоком 7 команды установлен первый 25 коммутатор, который передает на выход последовательные коды с информационных входов И1 или И2 от 7 или 22 в зависимости от уровня сигнала на входе управления (У). Результат контроля фиксируется первым 26 триггером. Для синхронизации работы мультиплексора 23, счетчиков 19 и 20 используется первый 27 формирователь импульсов, вход которого соединен с выходом 23, а выход - с третьим (R) входом счетчика 19 и первым тактовым входом счетчика 20. Чтобы избежать влияния переходных процессов, в блок 1 введены первый 28, второй 29 и третий 30 элементы задержки, которые подключены выходами к входам триггера 26, ИЗ, И5 мультиплексора 23 соответственно. Команда управления выполняется в два этапа - выбора объекта и формирования сигналов вида команды "включить" или "отключить", а пауза между этапами используется для диагностики работоспособности аппаратуры. Для этого в блок 1 введена группа элементов И 31 и первый элемент И 32, причем на первые информационные входы 31 поданы сигналы от элементов памяти вида команды "включить" и "отключить" блока 11, а на вторые управляющие входы - выходной сигнал первого элемента ИЛИ 33, к входам которого подключены сигналы с выходов "2" и "5" распределителя 24. Второй элемент ИЛИ 34 формирует сигнал приведения устройства в начальное состояние и воспринимает сигналы от триггера 26, входа 5 блока 1 и выхода "6" распределителя 24. Выходной сигнал 34 подан на третий (R) вход счетчика 20. Интервал контроля достоверности команд управления задается третьим элементом ИЛИ 35, который воспринимает сигналы с выходов "0", "1", "3", "5" распределителя 24. Последовательные коды, отображающие принятую команду и сформированные устройством сигналы управления, сравниваются компаратором 36 дискретных сигналов, сигнал которого подан на второй информационный вход триггера 26. В блок 1 также введены вспомогательные элементы - первый 37 и второй 38 инверторы, узел 39 разделительных диодов, состоящий из группы диодов 40.1...40.р - для приема через вход 6 блока 1 сигналов от контактов реле объектов в группе, группы диодов 41.1...41.n - для приема через вход 7 сигналов от контактов реле групп объектов, группы диодов 42.В, 42.O - для приема через вход 8 сигналов от контактов реле "включить" и "отключить". Выходные сигналы диодов узла 39 через шину 43 подаются на информационные (И) входы преобразователя 22. Индивидуальные сигналы состояния моторных приводов и результатов диагностики работоспособности аппаратуры поступают в узел памяти 8 по группе 1 входов блока 1. Вход 2 блока 1 соединен с общей шиной источников указанных индивидуальных сигналов, вход 3 соединен через выход 5 блока 6 с источником тактовых импульсов синхронизации ввода данных в узел памяти 8. Сигнал от инвертора 38 подается через выход 4 блока 1 на вход 1 блока 4 и используется как признак разрешения "ручного" управления моторными приводами.
На фиг.3 показана схема блока 2 разделительных диодов. Блок включает три группы - 44, 45 и 46 диодов. Группы диодов разделены на узлы - по три диода в каждом. Первые диоды узлов групп 44, 45, 46 воспринимают сигналы от усилителей 13, 14, 15 блока 1 через группы 1, 4, 7 входов, вторые диоды - от групп 3, 1, 2 выходов блока 4 кнопок управления через группы 2, 5, 8 входов, третьи диоды узлов используются в цепях удержания реле в рабочем состоянии и соединены с группами 1, 2, 3 выходов блока 3 через группы 3, 6, 9 входов. Количество узлов в группе диодов 44 соответствует числу "n" групп моторных приводов, количество узлов в группе диодов 45 равно "р" - числу моторных приводов в одной группе, а количество узлов в группе диодов 46 равно двум - по одному для команд управления "включить" и "отключить". Катоды разделительных диодов подключены к входам 1...9 блока 2, а аноды образуют группы 47, 48, 49 выходных сигналов и соединены с группами 1, 2, 3 выходов блока 2.
На фиг.4 приведена схема блока 3 реле. Реле разделены на группы 50, 51, 52. В группу 50 включено "n" реле 50.1...50.n - по одному для каждой группы моторных приводов; в группу 51 - "р" реле 51.1...51.р - по одному для каждого моторного привода в группе; в группу 52 - два реле 52.В и 52.О - по одному для вида команды "включить" и "отключить". Один вывод обмотки каждого реле соединен через группы входов 3, 4, 5 с соответствующими выходами шин 47, 48, 49 групп 1, 2, 3 выходов блока 2 и с анодами соответствующих защитных диодов D50/1...D50/n, D51/1...D51/p, D52.B, D52.O. Катоды диодов каждой группы объединены и соединены с объединенными вторыми выводами обмоток реле соответствующих групп. Объединенные вторые выводы обмоток реле группы 52 соединены с входом 1 блока 3 и выходом 2 блока 5, объединенные выводы обмоток реле групп 50 и 51 соединены между собой и подключены к входу 2 блока 3 и выходу 1 блока 5. Контакты К50.1/1...К50.n/1 образуют последовательную цепочку, в которой размыкающий контакт одного реле соединен с переключающим контактом смежного по номеру реле, переключающий контакт К50.1/1 является входом цепочки и соединен с выходом "0В" источника питания, размыкающий контакт К50.n/1 является выходом цепочки. Аналогичные цепочки образованы контактами К51.1/1...К51.р/1 группы реле 51 и контактами К52.В/1, К52.O/1 группы реле 52. Входы цепочек соединены с шиной "0В", а выходы соединены соответственно с выходами 5 и 4 блока 3 и входами 1 и 3 блока 5. Замыкающие контакты реле группы 50 образуют индивидуальные выходы и через шину 53 соединены с группой 1 выходов блока 3 и группой входов 3 блока 2. Аналогично, замыкающие контакты реле групп 51 и 52 образуют индивидуальные выходы, которые через шины 54 и 55 соответственно подключены к группам 2 и 3 выходов блока 3 и группам входов 6 и 9 блока 2.
На фиг.5 приведена схема блока кнопок управления, которые используются в режиме "ручного" управления моторными приводами. Кнопки, по аналогии со структурой команд управления, подаваемых "автоматически", разбиты на "n" групп по "р" объектов в каждой. На фиг.5, для примера, показаны группы кнопок 56 и 57, в каждую из которых входят кнопки К56.1...К56.р и К57.1...К57.р соответственно для управления моторными приводами групп 1...n, две общие для всех моторных приводов неарретирные кнопки 58.В и 58.O группы 58 - для выбора вида команды управления "включить" и "отключить", а также арретирная кнопка 59 для установки режима "ручного" или "автоматического" управления моторными приводами. Показанное положение кнопки 59 соответствует "ручному" режиму управления. В группах 56 и 57 переключающие контакты "р" кнопок соединены в последовательные цепочки так, что размыкающий контакт одной соединен с переключающим контактом смежной кнопки, переключающий контакт первой кнопки группы является входом, а размыкающий контакт последней кнопки - выходом последовательной цепочки. Вывод замыкающего контакта каждой кнопки соединен с катодом диода Д56.1...Д56.р, Д57.1...Д57.р соответственно а аноды диодов образуют индивидуальные выходы, соответствующие номерам 1...р моторных приводов в группе, образующие группу сигналов шины 60, которая соединена с группой 1 выходов блока 4 и группой 2 входов блока 2. Входы цепочек соединены соответственно с анодами первого и второго диодов Д61, Д62, у которых катоды объединены и соединены с выходом усилителя 63. Выходы "n" последовательных цепочек соединены соответственно с входами инверторов 64.1...64.n группы инверторов 64, выходы инверторов образуют группу 1...n сигналов, которые через шину 65 подключены к группе 3 выходов блока 4 и группе 8 входов блока 2. Кнопки 58.В и 58.O узла 58 соединены аналогично группам кнопок узлов 56 и 57: вход группы кнопок 58 соединен с выходом усилителя 63, индивидуальные выходы соединены через шину 66 с группой 2 выходов блока 4 и с группой 5 входов блока 2. Общий выход последовательной цепочки соединен с размыкающим контактом кнопки 59. Переключающий контакт 59 соединен с выходом 4 блока 4 и входом 4 блока 5, а замыкающий контакт - с выходом второго 67 формирователя импульсов. Вход 67 соединен с выходом 4 блока 3 и входом 3 блока 4, у которого вход 2 соединен с выходом 5 блока 3 и входом третьего 68 формирователя импульсов. Выход 68 соединен со вторым входом четвертого элемента ИЛИ-НЕ 69, соединенного первым входом с входом 1 блока 4 и выходом 4 блока 1. Вход и выход 68, переключающий и размыкающий контакты 59, входы 64.1...64.n, выход 63 соединены соответственно с одним выводом первого... седьмого резисторов 70...76, другие выводы которых объединены и подключены к выходу "U" источника питания. С помощью резисторов фиксируется уровень "1" и "0" сигналов в цепях, подключенных к резисторам.
На фиг.6 приведена схема блока 5 анализа. В блок включен второй 77 генератор тактовых импульсов, выход которого соединен с первыми тактовыми входами третьего 78 и четвертого 79 счетчиков, второй 80, третий 81 и четвертый 82 триггеры. Триггер 80 является составной частью таймера, в который включается также счетчик 79 и второй 83 коммутатор, который образует сигнал "1" на прямом выходе при завершении цикла работы таймера. Элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 84 сравнивает сигнал от пикового детектора 85 и от цепочки контактов реле группы 51, поступающий на первый вход 84 через выход 5 блока 3 и вход 1 блока 5. Для формирования сигналов управления и контроля используются второй...шестой усилители 86...90. Рабочее напряжения "U" на обмотки реле групп 50 и 51 подается с выхода 86 через выход 1 блока 5, а на обмотки реле группы 52 - с выхода 87 через выход 2 блока 5. Усилитель 88 является детектором "заземления" любой шины связи моторных приводов с устройством. Усилители 89 и 90 формируют сигналы соответственно при фиксации замыкания между общими шинами "В" и "О" моторных приводов или между индивидуальными шинами разных моторных приводов и "заземления" любой из указанных шин. Усилитель 86 воспринимает сигнал от счетчика 78 через третий 91 инвертор, а усилитель 87 - от второго элемента И 92. Выход третьего элемента И 93 соединен с первым (S) входом триггера 81 и переводит его в состояние "1" при обнаружении неисправности цепей связи с моторными приводами. Пятый 94 и шестой 95 элементы ИЛИ-НЕ соединены входами с выходами триггеров 80, 83, элемента 84 и цепочки контактов реле группы 52 через выход 4 блока 3 и вход 3 блока 5. Уровень сигнала от цепочки контактов формируется восьмым 96 резистором, а уровень порогового напряжения для сравнения с контрольным сигналом, поступающим на вход 2 блока 5 с выхода 7 блока 6, - девятым резистором 97. Указанные напряжения сравниваются компаратором 98 аналоговых сигналов. Если контрольный сигнал на первом входе 98 превышает пороговый, на выходе 98 формируется логический сигнал "1", в противном случае - сигнал "0". Четвертый элемент задержки 99 предотвращает влияние переходных процессов на фиксацию результатов контроля триггером 81, а первый 100 и второй 101 оптроны формируют сигналы, отображающие результаты контроля, для передачи в ПУ, причем сформированные сигналы изолируются от цепей контроля. Индивидуальные сигналы 1 и 2 контроля через шину 102 и группу выходов 4 блока 5 подаются на группу 1 входов блока 1, а общая шина 103 через выход 5 блока 5 соединена с входом 2 блока 1. Попадание "земли" на любую шину связи устройства с моторными приводами воспринимается пороговым узлом 104, который включает резистор 104-1 и стабилитрон 104-2. Если сигнал на входе 7 блока 5 оказывается ниже порога, определяемого стабилитроном 104-2, на выходе узла образуется сигнал "0", а на выходе усилителя 88 - сигнал "1".
На фиг.7 приведена схема блока 6 контроля и сигнализации. В него включено "n" групп узлов 105, 106 по "р" узлов - 105-1...105-р...106-1...106-р, в каждой группе. Общее число узлов 105,106 равно числу моторных приводов. Каждый узел моторного привода 107 условно показан на фиг.7 в виде обмоток 108 двигателя моторного привода и переключателя К 109. Переключатель подключает обмотки 108 к общим для всех моторных приводов шинам "В" ("включить") или "О" ("отключить"). Подвижный контакт переключателя К 109 механически (через редуктор) соединен с осью двигателя моторного привода; после перевода моторного привода в новое, например, во включенное, состояние переключатель подключает обмотки моторного привода к шине "О" и наоборот. Переключатель К 109 разрешает последующее переключение моторного привода в состояние, противоположное установленному. В каждый узел 105, 106 включены последовательные разделительные диоды 110 и 111, к точке соединения диодов подключен катод разделительного диода 112. Анод диода 112 подключен к выходу 3 узла, выходы 3 всех узлов 105, 106 объединены между собой. Последовательно с диодами 110 и 111 включены: размыкающий - переключающий контакт реле блока 51, причем номер реле соответствует номеру узла 105,106 в группе (номеру моторного привода 1...р в группе 1...n); ограничивающий резистор 113; входная цепь оптрона 114; катод двухцветного светодиода 115. Резистор 113 определяет рабочий ток через оптрон 114 и светодиод 115. Оптрон формирует пару сигналов состояния моторного привода, а светодиод визуализирует установленное состояние моторного привода. Два вывода анодов светодиода являются вторым и третьим входами узла 105, 106. Одинаковые по номерам входы 2 и 3 узлов объединены и подключены к сигналам управления, которые формируются седьмым...десятым усилителями 116...119. Усилители 116 и 118 в рабочем состоянии подключают к выходам напряжение "U", а усилители 117 и 119 - напряжение "0В". Выходы усилителей 116 и 118 соединены соответственно со вторым и третьим входами узлов 105, 106, а выходы 117 и 119 - с цепочками из контактов 52. В-2 - 50.1-2...50.n-2 и 52.0-2-50.1-3...50.n-3 соответственно. Контрольные сигналы формируются одиннадцатым 120 и двенадцатым 121 усилителями, которые подключены соответственно к выходам третьего 122 генератора тактовых импульсов и четвертого 123 инвертора. Выход пятого 124 инвертора подключен через выход 5 блока 6 и вход 5 блока 5 ко второму управляющему входу триггера 81 и к входам усилителей 118, 119, а вход 124 - к входам усилителей 116 и 117. Выход усилителя 119 подключен через шестой 125 инвертор к выходу 6 блока 6, который через вход 6 блока 5 и элемент задержки 99 соединен с третьим, тактовым входом триггера 81. Тактовые сигналы для управления усилителями 116...119 формируются пятым 126 счетчиком, у которого первый тактовый вход соединен с выходом инвертора 123. Уровень контрольных сигналов определяется величинами десятого 127, одиннадцатого 128 и двенадцатого 129 резисторов, которые соединены с выходом "U" источника питания и с выходами усилителей 121, 120 и 119 соответственно. Сформированные усилителями 120 и 121 сигналы поступают в цепи контроля через первый разделительный трансформатор 130. Один вывод вторичной W2 обмотки 130 соединен с одним входом последовательной цепочки из контактов 52.O-3-52.В-3-50.n-4...50.1-4, другой вход которой подключен к одному выводу обмотки W1 второго разделительного трансформатора 131, причем вторые выводы обмоток W2 трансформатора 130 и W1 трансформатора 131 соединены между собой. Точка соединения указанной цепочки контактов и обмотки W1 трансформатора 131 соединена с объединенными выходами 3 всех узлов 105, 106. Для управления моторными приводами используется внешний источник, например, напряжения 220 В переменного тока, который подключается через выходы 3 и 4 блока 6 к выводам обмотки W1 третьего разделительного трансформатора 132, который изолирует цепи управления моторными приводами от внешнего источника питания. Выводы обмотки W2 трансформатора 132 через замыкающие контакты 52.В-2, 52.O-2, 52.В-3, 52.O-3 подключаются к обмоткам 108 двигателей моторных приводов. Рабочее напряжение подается только в цепь выбранного моторного привода. Например, на обмотки 108 моторного привода 105-1 рабочее напряжение поступает при замыкании цепи между переключающим и замыкающим контактами 50.1-4 через вход 1 узла 105-1 и через цепь между замыкающим и переключающим контактами 51.1/2 узла 105-1. Входы 1 (выходы 4) узлов 105, 106, соответствующие одной группе моторных приводов, объединены. Контрольные сигналы с обмотки W1 трансформатора 131 передаются в обмотку W2 и поступают на фильтр 133. Выходные сигналы 133 через выход 7 блока 6 и вход 2 блока 5 поступают на вход компаратора 98. Для изоляции цепей контроля и управления моторными приводами используется третий 134 изолирующий диод. Индивидуальные сигналы, отображающие состояние моторного привода, с выходной цепи оптрона 114 через первые выходы узлов 105,106 и группу 1 выходов блока 6 поступают в шину 102. Вторые выводы выходных цепей всех оптронов объединены и через выход 2 узлов 105, 106 поступают в шину 103.
Триггеры устройства могут быть реализованы, например, на интегральных микросхемах 561 ТМ2. Сигнал "1", поданный на первый (S) вход триггера, переводит его в состояние "1", а поданный на четвертый (R) вход - в состояние "0". Для синхронного управления используется второй (D) и третий (С) входы. Триггер переходит в состояние, соответствующее сигналу на втором входе в момент переключения сигнала на третьем входе из "0" в "1", На выходе триггера формируется прямой и инверсный сигналы. Некоторые из указанных сигналов в конкретных схемах блоков устройства не используются и на схеме не показываются.
Счетчики устройства могут быть реализованы, например, на интегральных микросхемах 561 ИЕ10. Счетчик переводится в очередную кодовую позицию при переключении сигнала на первом (С) входе из "0" в "1" при подаче на второй, управляющий вход сигнала "1", а возвращается в начальное положение при поступлении сигнала "1" на третий (R) вход.
Преобразователи параллельного кода в последовательный и мультиплексор устройства могут быть реализованы, например, на интегральных микросхемах 561 КП2. На выход схемы передается сигнал с одного из информационных входов, номер которого определяется кодом на адресных шинах. Благодаря симметричности схемы мультиплексор может использоваться как демультиплексор, на базе которого выполнен распределитель 24 устройства.
Коммутатор 83 устройства представляет собой дешифратор, формирующий на выходе сигнал "1" при поступлении на входы заданной кодовой комбинации. Он может быть реализован на элементе И, число входов которого равно разрядности входного кода, и наборе перемычек, которыми к входам элемента И подключаются выбранные разряды кода. Для формирования инверсного сигнала к выходу элемента И подключается инвертор.
Регистры сдвига с последовательным вводом и параллельным выводом данных блока памяти 11 могут быть реализованы, например, на интегральных микросхемах 561 ИР2. На первый информационный вход регистров подается последовательный код, а на второй вход - тактовые импульсы. Третий вход (R) приведения регистров в начальное состояние в схеме устройства не используется и на фигуре не показан.
Усилители устройства могут быть реализованы, например, на интегральных микросхемах 1109 КТ2 или с использованием транзисторов. Усилители обеспечивают большой коэффициент усиления и совместимы с выходами маломощных КМОП интегральных микросхем 561 серии.
Компаратор 98 аналоговых сигналов может быть реализован, например, на интегральной микросхеме 554 СА3.
Формирователи импульсов устройства могут быть реализованы, например, на основе триггера, у которого прямой выход через интегрирующую RC цепочку соединен с четвертым (R) входом. Сигнал управления подается на третий (С) вход триггера при постоянном подключении второго, информационного входа к выходу "U" источника питания. На выходе схемы формируется импульсный сигнал, фронт которого совпадает с моментом переключения сигнала на третьем выходе из "0" в "1", а длительность определяется постоянной времени интегрирующей цепочки.
Элементы задержки устройства могут быть реализованы на интегрирующих RC цепочках. Время задержки появления выходного сигнала "1" относительно момента поступления входного сигнала определяется постоянной времени интегрирующей цепочки.
Устройство может управлять моторными приводами УМП-11, УМПЗ-11, ПДЖ и их аналогами.
Логические элементы И, ИЛИ, НЕ, И-НЕ, ИЛИ-НЕ, ИСКЛЮЧАЮЩЕЕ ИЛИ реализуются на соответствующих микросхемах серии 561 (или аналогах).
Рассмотрим работу устройства при приеме команд, поступающих от удаленного пункта управления.
Команда управления поступает в виде последовательного кода, содержащего синхронизирующие сигналы, стартовую комбинацию, адрес пункта приема команды (контролируемого пункта), а также информационную часть - коды номера группы объектов управления и номера объекта в группе, признак вида команды - "включить" или "отключить", причем для повышения достоверности информационная часть передается дважды - прямым и инверсным кодами.
Последовательный код из линии связи воспринимается приемником 7, который отделяет информационную часть посылки и ретранслирует на первый выход принятый информационный код. На второй выход подается сигнал - признак приема кода команды, по которому устройство реализует процедуры ввода и обработки информации. Принимаемый и ретранслируемый коды синхронизируется сигналами первого генератора 9 тактовых импульсов.
Процедуры ввода и обработки проводятся по этапам, номера которых определяются по выходным сигналам распределителя 24. На управляющий (У) вход 24 подан сигнал "1" от источника питания (U), не показанного на фиг.2, а на группу адресных (А) входов - выходные сигналы счетчика 20. Сигнал "1" формируется на выходе 24, соответствующем коду на адресных (А) входах. До начала приема кода команды счетчик 20 приведен в начальное состояние, а сигнал "1" образован на выходе "О" распределителя 24.
Завершение установленного этапа работы устройства фиксируется мультиплексором 23, у которого адресные входы (А) соединены с соответствующими входами 24 и выходами счетчика 20. Сигнал "1" образуется на выходе 23, если на его вход, соответствующий коду на адресных входах, подан сигнал "1". На этапе "0" ожидается поступление на информационный вход И0 23 сигнала "1", который, как указывалось выше, образуется на втором выходе 7 при поступлении кода команды. Сигнал "1" на выходе 23 переводит в рабочее состояние формирователь импульсов 27. Импульсный сигнал 27 поступает на первый вход счетчика 20 и третий вход счетчика 19. Счетчик 20 по сигналу 27 переключается в следующую кодовую позицию, а счетчик 19 возвращается в начальное состояние. В рассматриваемом режиме работы счетчик 20 переходит в первую позицию, а сигнал "1" образуется на выходе "1" распределителя 24. Устройство реализует процедуры этапа "1".
На этапе "1" на выходе элемента И 32 образуются импульсные сигналы, повторяющие сигналы от генератора 9. Сигналы И 32 синхронизируют запись информации в узел памяти 11. Узел 11 выполнен на регистре сдвига с последовательным вводом и параллельным выводом данных и включает элементы памяти по числу групп объектов управления, числу объектов управления в группе и для двух сигналов вида команды управления. Например, если все объекты управления разбиты на "n" групп по "р" объектов в каждой группе (для приема команд управления для "n·р" объектов), общее число элементов памяти в узле 11 равно n+р+2. Вывод кода из приемника 7, ввод его в узел памяти 11 и управление счетчиком 19 синхронизируется сигналами генератора 9. Завершение записи кода в память соответствует появлению сигнала "1" на дополнительном (К+1) выходе счетчика 19, причем К=]log(n+р+2)[,где] [ - знак округления логарифма до большего ближайшего целого числа. Чтобы избежать изменения состояния счетчика 19 после установки сигнала "1" на (К+1) выходе, инвертированный элементом 37 сигнал подается на второй, управляющий вход счетчика и блокирует его чувствительность к тактовым сигналам, поступающим на первый вход.
Сигнал "1" с выхода (К+1) счетчика 19 подается на вход И1 мультиплексора 23 и вызывает формирование очередного импульсного сигнала на выходе 27, который переводит счетчик 19 в начальное состояние, а устройство - на следующий ("2") этап работы.
На этапе "2" проверяется соответствие повторно принимаемого кода команды и кода, зафиксированного 11. Так как для целей управления объектами используются усиленные элементами блока 12 сигналы, в цепь контроля соответствия кодов включаются группы инвертирующих усилителей блока 12:13 - для сигналов, идентифицирующих номер группы объектов управления, 14 - для сигналов номера объекта управления в группе, 15 - для сигналов вида команды управления. Сигналы вида команды от 11 на усилители 15 проходят через дополнительную группу элементов И 31, что обеспечивает формирование рабочих выходных сигналов только в разрешенные отрезки времени, - когда на второй вход группы И 31 подан сигнал "1". Так как на рассматриваемом этапе "2" на второй вход И 31 подан сигнал "1" с выхода элемента ИЛИ 33, сигналы от 11 проходят на усилители 15. На этапе "2" на выходах 13, 14, 15 образуется параллельный код, в каждом разряде которого сигнал (при отсутствии искажений) инверсный относительно принятого 7 последовательного кода. Образованный параллельный код должен совпадать с повторно принимаемым инверсным кодом команды. Для проверки соответствия кодов образованный параллельный код преобразуется 21 в последовательный. Так как работа преобразователя 21 и приемника 7 синхронизируется сигналами одного генератора 9, сравниваемые коды оказываются синхронными. Коды от 7 и коммутатора 25 сравниваются компаратором 36. На информационные входы (И1 и И2) 25 поступают сигналы от 7 и второго преобразователя параллельного кода в последовательный 22, а на управляющий (У) вход-сигнал с выхода "4" распределителя 24. В рассматриваемом режиме (реализации процедур этапа "2") на управляющий вход 25 подан сигнал "0", поэтому на выход 25 проходят сигналы с входа И1, а элемент 36 сравнивает инвертированные блоком 12 сигналы, записанные в блок памяти 11, и повторно принимаемый последовательный инверсный информационный код команды управления. Если сравниваемые коды не совпадают хотя бы в одном разряде, на выходе 36 и на втором, управляющем входе триггера 26 появляется сигнал "1". На третий синхронизирующий вход 26 подается сигнал с выхода элемента задержки 28, который (с небольшим сдвигом во времени) повторяет сигналы генератора 9. Вводимая задержка сдвигает моменты сравнения и переноса результата сравнения в триггер 26, благодаря чему устраняется влияние переходных процессов при выводе данных из блоков 7 и 21. Если зафиксировано несовпадение сравниваемых кодов, триггер 26 переводится в состояние "1", так как в рассмотренном режиме (реализации процедур этапа "2") триггер 26 принудительно не удерживается в состоянии "0" сигналом от элемента ИЛИ 35, поступающим на четвертый (R) вход триггера. Сигналом от 26, прошедшим через элемент ИЛИ 34, возвращается в начальное состояние счетчик 20, а устройство переводится на этап "0" и ожидает поступление очередной команды. Ранее принятая команда не выполняется.
Если триггер 26 остается в состоянии "0" к моменту появления сигнала "1" на (К+1) выходе счетчика 19, сигнал "1" от счетчика проходит на выход 23 и, как описывалось выше, устройство переводится на следующий ("3") этап работы. На этапе "3" формируется интервал времени, достаточный для переноса сигналов от блока 12 в выходные реле блока 3. Интервал времени определяется элементом задержки 29. После завершения установленного интервала сигнал "1" подается с выхода 29 на вход ИЗ мультиплексора 23, в результате чего устройство переводится на этап "4". Следует отметить, что на этапе "3" сигнал "1" не образуется на выходе ИЛИ 33 и на втором входе И 31, поэтому сигналы от 11 не подаются на входы усилителей 15, а реле вида команды управления "включить" и "отключить" не переводятся в рабочее состояние.
Этап "4" используется для проверки соответствия зафиксированной блоком 11 информации и установленного состояния выходных реле. Состояние реле блока 3 определяется по положению контактов К50.1/1...К50.n/1 группы реле 50.1...50.n, которые фиксируют номер (1...n) группы моторных приводов; К51.1/1...К51.1/р группы реле 51.1...51.р фиксации номера (1...р) моторного привода в группе и К52.В/1, К52.O/1 группы реле 52.В, 52.O - фиксации вида команды управления - "включить" или "отключить". Сигналы от указанных контактов от групп выходов 53, 54 и 55 через входы 6, 7, 8 блока 1 подаются на узел 39 разделительных диодов, включающих группы диодов 40.1...40.р, 41.1...41.n, 42.В и 42.0, воспринимающих сигналы от контактов для групп реле 50, 51 и 52 соответственно. Сигналы от разделительных диодов через шину 43 подаются на информационный (И) вход преобразователя 22, воспринимающего по группе адресных (А) входов сигналы от счетчика 19. Образуемый 22 последовательный код синхронизируется сигналами генератора 9. На этапе "4" код от 22 через вход И2 коммутатора 25 проходит на вход компаратора 36 вместе с кодом от 21. В результате проверяется совпадение хранимых в узле 11 и полученных от выходных реле сигналов. Отметим, что на этапе "4" реле вида команды еще должны оставаться в нерабочем состоянии, а на выход ИЛИ 33 не подан сигнал с выхода "4" распределителя 24. Сигналы вида команды управления "включить" и "отключить" с выхода 11 на вход усилителей 15 не проходят. Поэтому на данном этапе проверяется также совпадение сигналов от блока 15 с сигналами от контактов реле группы 52. Если по сигналам от контактов реле группы 52 будет зафиксирован перевод реле в рабочее состояние, компаратор 36, как описано ранее, обнаружит ошибку и заблокирует выполнение недостоверной команды.
Если обнаруживается несовпадение кодов, как описано ранее, переводится в "1" триггер 26, а устройство, не выполняя принятую команду, переводится в начальное состояние. Если триггер 26 остается в состоянии "0" к моменту появления сигнала "1" на (К+1) выходе счетчика 19, устройство переводится на следующий ("5") этап работы.
Этап "5" выделяется для удержания выходных реле в рабочем состоянии. Интервал времени удержания реле в рабочем состоянии задается элементом задержки 30. Сигнал "1" с выхода "5" распределителя 24 подается на вход элемента 33 и разрешает перевод в рабочее состояние одного из реле группы 52. Длительность этапа "5" выбирается достаточной для перевода реле в рабочее состояние. После завершения установленного интервала по сигналу от 30 распределитель 24 переводится в позицию "6". В результате устройство переводится в начальное состояние и ожидает приема очередной команды.
Как видно, для выполнения принятой команды управления необходимо:
- соответствие прямого и инверсного кодов принятой команды управления,
- отсутствие искажений при записи команды в блок элементов памяти,
- соответствие принятой команды и состояние выходных реле, воспринимающих команду.
До выполнения всех указанных проверок реле 52.В и 52.O удерживаются в нерабочем состоянии, для чего в цепи управления реле включена группа элементов И 31. Рабочие сигналы на реле подаются на этапах "2"и "5". Длительность этапа "2" меньше времени срабатывания реле, поэтому на данном этапе реле не переводятся в рабочее состояние, но длительность этапа "2" достаточна для фиксации сигналов от усилителей блока 12, к которым (через разделительные диоды блока 2) подключаются обмотки реле 52. В этап "5" устройство переводится после успешного проведения всех указанных проверок, а длительность этапа "5" устанавливается, как описано выше, достаточной для перевода реле в рабочее состояние.
Рассмотрим работу устройства при исполнении принятой команды управления моторным приводом.
Сигналы с выходов усилителей 13, 14, 15 блока 12 поступают соответственно на "n" разделительных диодов 44.1/1...44-n/1 (по одному для каждой группы моторных приводов); "р" разделительных диодов 45.1/1...45.р/1 (по одному для каждого моторного привода группы); два разделительных диода 46.В/1 и 46.О/1 (по одному для каждого вида команды управления - "включить" и "отключить"). На другие группы разделительных диодов блоков 44, 45, 46 поступают сигналы от других блоков устройства. Объединенные аноды одноименных групп разделительных диодов образуют:
- "n" выходных сигналов на шине 47, поступающих через группу 1 выходов блока 2 и группу 3 входов блока 3 на один вывод обмоток реле 50.1...50.n,
- "р" выходных сигналов на шине 48, поступающих через группу 2 выходов блока 2 и группу 4 входов блока 3 на один вывод обмоток 51.1...51.р,
- два выходных сигнала на шине 49, поступающих через группу 3 выходов блока 2 и группу 5 входов блока 3 на один вывод обмоток реле 52.В и 52.О.
Другие, объединенные выводы обмоток реле групп 50 и 51 через вход 2 блока 3 и выход 1 блока 5 подключаются к выходу усилителя 86, а объединенные выводы обмоток реле группы 52 - через вход 1 блока 3 и выход 2 блока 5 подключаются к выходу усилителя 87. Если устройством сформированы сигналы перевода усилителей 86 и 87 в рабочее состояние, их выходы подключаются к шине напряжения питания (U) и замыкают цепи протекания тока по обмоткам реле. Например, для перевода реле 50.1 в рабочее состояние ток должен проходить по цепи: "U" - выход 86 - выход 1 блока 5 - вход 2 блока 3 - выводы обмотки реле 50.1 - вывод 1 группы 3 выходов блока 3 - выход 1 группы 1 выходов блока 2 - анод-катод диода 44.1/1 - вход 1 группы 1 входов блока 2 - выход 1 группы 1 выходов блока 1 - выход первого усилителя узла 13 блока 12 - шина "0В". Аналогично при выполнении команды управления переводятся в рабочее состояние по одному реле в группах 51 и 52. Параллельно обмоткам реле блока 3 включены защитные диоды D50.1...D50.n, D51.1...D51.р, D52B, D52O, которые предотвращают возникновение паразитных напряжений при размыкании цепи протекания тока по обмоткам реле.
Первые переключающие контакты реле групп 50, 51, 51 - К50.1/1...К50.n/1; К51.1/1...К51.р/1; К52.В/1, К52.O/1, образуют три последовательные цепочки, в которых средний вывод первого из контактов цепочки подключается к "нулевой" шине источника питания (0В), размыкающий контакт соединяется со средним выводом следующего по номеру переключающего контакта, размыкающий контакт последнего по номеру контакта цепочки образует общий вывод цепочки. Замыкающие контакты образуют группы индивидуальных выходов и подключаются через соответствующую шину 53, 54, 55, группы 1, 2, 3 выходов блока 3 и группы 3, 6, 9 входов блока 2 к группам разделительных диодов аналогично тому, как присоединяются к разделительным диодам выходы усилителей блока 12. Благодаря подключению к обмоткам реле выходов от контактов этих же реле обеспечивается создание цепи удержания реле в рабочем состоянии до снятия напряжения "U" со вторых выводов обмоток. Как будет показано далее, реле удерживаются в рабочем состоянии в течение времени, установленного таймером. Включенные параллельно обмоткам реле защитные диоды предотвращают возникновение паразитных напряжений, генерируемых в обмотке реле при прерывании тока, т.е. при отключении реле от источника питания.
Контакты К51.1/2...К51.р/2, К51.1/3...К51.р/3 группы реле 51.1...51.р включены в цепи выбора моторного привода 1...р в группе 1...n, контакты 50.1-2...50.n-2, 50.1-3...50.n-3, 50.1-4...50.n-4 группы реле 50.1...50.n включены в цепи выбора группы 1...n моторных приводов узлов 105-1...105-р, 106-1...106-р. Рассмотрим для примера работу устройства при выполнении команды "включить" моторный привод 107-1 узла 105-1. Моторный привод переводится в рабочее состояние по цепи: напряжение 220 В с вторичной обмотки W2 разделительного трансформатора 132 - замкнувшийся контакт 52.В-3 реле 52.В - замкнутые контакты 50.n-4...50.2-4 - замкнувшийся контакт 50.1-4 реле 50.1 первой группы - вход 1 узла 105-1 - замкнувшийся контакт К51.1/2 реле 51.1 первого объекта в группе - обмотки 108 двигателя моторного привода 107-1 - переключатель К 109 моторного привода (в указанном на фиг.7 положении для отключенного состояния привода) - общая шина "В" моторных приводов - переключившийся в рабочее состояние (противоположное показанному на фиг.7) контакт 52.В-2 реле 52.В - другой вывод обмотки W2 разделительного трансформатора 132. Под действием рабочего тока, протекающего по обмоткам 108 двигателя, моторный привод переключается в состояние "включен", а переключатель К 109, подвижный контакт которого механически (через редуктор) соединен с осью двигателя, устанавливается в состояние, противоположное показанному на фиг.7. Цепь рабочего тока прерывается. Во вновь установленном положении переключателя К 109 моторный привод 107-1 оказывается подготовленным для приема команды "отключить". Цепь отключения моторного привода 107-1 аналогична описанной и включает контакты 52.O-2 и 52.O-3 реле 52.O. Аналогичные цепи образуются при управлении любым другим моторным приводом.
При отсутствии команды управления все узлы 105-1...105-р, 106-1...106-р подключены к цепям контроля и сигнализации состояния моторного привода.
Рассмотрим для примера цепь контроля и сигнализации состояния моторного привода 105-1. Предположим, что моторный привод отключен, т.е. переключатель К109 установлен в положение, показанное на фиг.7. Для целей контроля используются тактовые импульсы генератора 122 (частота импульсов примерно равна, как указывалось выше, 2000 Гц) и инвертора 123. Сигналы от 123 подаются на первый тактовый вход 126 счетчика. На выходе счетчика 126 формируются сигналы с частотой, близкой к 70 Гц. Частота выбирается так, чтобы импульсное свечение индикатора - двухцветного светодиода 115, воспринималось глазом как постоянное. Сигналы от 126 подаются на входы усилителей 116 и 117, при переводе в рабочее состояние усилителя 116 на выход проходит сигнал "U", а при переводе в рабочее состояние усилителя 117 - сигнал "0В". В результате замыкается цепь: "U" - выход 116 - вход 2 узла 105-1 - один анод светодиода 115 - катод 115 - входная цепь оптрона 114 - ограничивающий резистор 113 - последовательно включенные разделительные диоды 110 и 111 - замкнутый контакт 51.1/2 реле 51.1, обмотки 108 двигателя моторного привода 107-1 - переключатель К 109 - шина "В" моторных приводов - последовательная цепочка замкнутых контактов 52.В-2, 50.1-2...50.n-2 - выход 117 - шина "0В" источника питания. Видно, что в течение половины периода выходного сигнала счетчика 126 ток проходит через сретодиод 115. Во второй половине периода сигнала 126 усилители 116 и 117 переводятся в нерабочее состояние, а аналогичная пара усилителей 118 и 119 - в рабочее состояние. Напряжение "U" подается с выхода усилителя 118 на вход 3 узла 105-1 и второй анод светодиода 115, однако цепь для протекания тока не замыкается, так как в рассматриваемом режиме сигнал "0В" подается с выхода усилителя 119 через цепочку замкнутых контактов 50.n-3...50.1-3, 52.0-2 на шину "0" моторных приводов и попадает на разомкнутый контакт переключателя К 109 узла 107-1. Таким образом, при отключенном состоянии моторного привода 107-1 ток в одной половине периода сигнала от счетчика 126 проходит через светодиод 115, вызывая его свечение одним, например, красным цветом. Во второй половине периода сигнала от 126 ток через светодиод 115 не проходит. В противоположном (включенном) состоянии моторного привода 107-1 в первой половине периода сигнала 126 ток через светодиод 115 не протекает. Во второй половине периода, когда напряжение "U" подается через усилитель 118 на вход 3 узла 105-1, а напряжение "0B" - на шину "O" моторных приводов, цепь тока через светодиод 115 замыкается, в результате чего светодиод светится другим, например зеленым, цветом. Так как через светодиод ток протекает не в двух, а в одной половине периода сигнала от 126, импульсный ток устанавливается вдвое больше номинального. Величина тока определяется ограничивающим резистором 113. Как указывалось, для создания иллюзии постоянного свечения частота рабочих импульсов выбирается примерно равной 70 Гц.
В цепь сигнализации включается также оптрон 114 для фиксации состояния моторного привода. Оптрон изолирует цепь управления моторным приводом от цепи приема информации о состоянии моторных приводов, которые считываются с выходных цепей оптронов 114. Индивидуальные сигналы, идентифицирующие состояние каждого моторного привода, с первого вывода выходной цепи оптрона через группу 1 выходов блока 6 и группу 1 входов блока 1 поступают на первый вход узла памяти 8 сигналов передачи. Общий для всех оптронов 114 сигнал со второго выхода выходной цепи оптронов через выход 2 блока 6 и вход 2 блока 1 поступает на второй вход узла 8 и соединяется в узле с общей шиной "0В". Ввод данных в элементы памяти узла 8 синхронизируется сигналами, поступающими на третий вход от инвертора 124. Состояние каждого моторного привода заносится в два элемента памяти узла 8 - в первой и второй половинах периода сигнала от 124. Так как в зависимости от реального состояния моторного привода рабочий сигнал фиксируется в первой или второй половине периода сигнала от 124, в ячейки памяти состояния одного моторного привода заносятся сигналы "10" или "01". Таким образом, в узел 8 заносятся биимпульсные коды для каждого моторного привода, причем пара сигналов "10" соответствует включенному, а пара сигналов "01" - отключенному состоянию моторного привода.
Важно подчеркнуть, что при обрыве цепи связи моторного привода с устройством в ячейки памяти, выделенные для записи сигналов состояния одного моторного привода, заносятся сигналы "0" на двух половинах периода сигнала от 124, а при коротком замыкании между шинами "В" и "О" - два сигнала "1". В результате вместо стандартной пары сигналов "10" или "01" - биимпульсного корреляционного кода, образуются пары сигналов "11" или "00". Устройство, таким образом, формирует условно корреляционный биимпульсный код, в котором две кодовые комбинации ("10" и "01") соответствуют состоянию моторного привода и свидетельствуют об отсутствии неисправностей цепи формирования сигналов, а две другие фиксируют неисправность и позволяют идентифицировать тип неисправности и адрес неисправной цепи. Такая методика формирования сигналов состояния моторных приводов повышает информативность передаваемых сообщений.
Группа выходных сигналов узла 8 поступает на группу информационных входов формирователя 10 сигналов передачи. Формирователь 10 преобразует параллельный код от 8 в последовательный, синхронный относительно сигналов генератора 9. Последовательный код с выхода 10 - информационное сообщение о состоянии моторных приводов, поступает в линию связи через вход 4 блока 1.
Чтобы предотвратить выполнение команды управления моторным приводом при неисправности аппаратуры или цепей связи устройства с моторными приводами, до выполнения команды проводится динамический контроль исправности аппаратуры. Для контроля используются сигналы переменного тока, частота которых существенно выше частоты сети питания - 50 Гц. Прямые и инверсные сигналы контроля частотой, примерно равной 2000 Гц, формируются генератором 122 и инвертором 123. Образованная пара сигналов подается на входы усилителей 120 и 121. В результате в каждых смежных половинах периода сигнала генератора 122 изменяется направление тока в первичной W1 обмотке трансформатора 130. Величина тока в каждой половине периода ограничивается резисторами 127 и 128. Переменный ток в обмотке W1 генерирует напряжение во вторичной W2 обмотке 130, которое создает ток в цепи: один вывод обмотки W2 - обмотка W1 трансформатора 131 - последовательная цепочка из замкнутых контактов 50.1-4...50.n-4, 52.В-3, 52.O-3 -другой вывод обмотки W2 трансформатора 130. Ток в первичной обмотке трансформатора 131 генерирует напряжение во вторичной обмотке W2, которое воспринимается фильтром 133. Фильтр пропускает сигналы относительно высокой частоты, примерно равной 2000 Гц, и подавляет сигналы более низких частот. В результате наиболее вероятные сигналы помех на выход фильтра 133 не проходят. Сигналы от 133 через выход 7 блока 6 и вход 2 блока 5 подаются на один вход компаратора 98, на второй вход которого подаются сигналы от делителя напряжения на переменном резисторе 97. Напряжение, с которым сравнивается сигнал от фильтра 133, определяется положением движка переменного резистора 97. В рассматриваемом режиме работы (отсутствие команды управления) величина сигнала от фильтра максимальна. Напряжение от 97 устанавливается существенно меньшим, чем максимальный сигнал от фильтра 133, поэтому на выходе 98 в рассматриваемом режиме образуются практически прямоугольные импульсы, длительность которых примерно равна половине периода сигналов от генератора 122. Сигналы от 98 пиковым детектором 85 преобразуются в сигналы примерно постоянного уровня, которые подаются на один вход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 84. На второй вход 84 подан сигнал от цепочки контактов реле 51.1...51.р через выход 5 блока 3 и вход 1 блока 5. В рассматриваемом режиме работы все реле блока должны быть в нерабочем состоянии, от цепочки указанных контактов на вход 84 должен поступать сигнал "0", а от пикового детектора 85 - сигнал "1", на выходе 84 должен быть сформирован сигнал "1", а на выходе элемента ИЛИ-НЕ 94 - сигнал "0". (Отметим, что от контактов К52.В/1 и 52.O/1 реле 52В и 52O и от триггера 81, которым фиксируется замыкание между шинами "В" и "0" моторных приводов, на другие входы 94 также должны поступать сигналы "0"). Сигнал "0" от ИЛИ-НЕ 94 подается на первый вход элемента ИЛИ-НЕ 95; на второй и третий входы 95 также должны поступать сигналы"0" от триггера 80 таймера и триггера 81, а на выходе - сформироваться сигнал "1". Сигнал "1" от 95 подается на третий (R) вход счетчика 78, который при этом удерживается в начальном состоянии и формирует сигнал "0" на выходе. Сигнал "0" от 78 преобразуется в "1" инвертором 91, который образует рабочий сигнал для усилителя 86. Как указывалось, через усилитель 86 на реле блока 3 подается рабочее напряжение. Таким образом, перевод реле в рабочее состояние разрешается при фиксации исправного состояния аппаратуры, в том числе и цепи формирования контрольных сигналов. Если же цепь контроля неисправна, на первый вход компаратора 98 поступает сигнал "0", на второй вход элемента 84 также поступает сигнал "0", который совпадает с сигналом на первом входе; на выходе 84 образуется сигнал "0". На все входы ИЛИ-НЕ 94 поступают сигналы "0", а на выходе 94 образуется сигнал "1", который вызывает образование на выходе 95 сигнала "0". Счетчик 78 принудительно не удерживается в начальном состоянии и оказывается чувствительным к тактовым сигналам от генератора 77. С установленной задержкой, которая определяется частотой генератора 77 и коэффициентом пересчета импульсов счетчика 78, на выходе 78 образуется сигнал "1", а на выходе инвертора 91 - сигнал "0". В результате усилитель 86 переводится в нерабочее состояние, а реле блока 3 не могут быть переведены в рабочее состояние. Величина задержки, создаваемой счетчиком 78, выбирается с учетом времени перевода реле в рабочее и нерабочее состояние, а также вероятной длительности сигналов помех.
Кроме указанной проверки, проводится также контроль отсутствия замыкания между общими шинами "В" и "О" моторных приводов. Для этого проверяется отсутствие перекрытия по времени сигналов "0" на выходах усилителей 117 и 119. Если общие шины "В" и "О" моторных приводов перемыкаются между собой, выходы усилителей 117 и 119 при замкнутых цепочках из контактов 52.В-2, 50.1-2...50.n-2 и 52.O-2, 50.1-3...50.n-3 также оказываются соединенными. В результате на двух половинах периода сигнала 124 на объединенном выходе усилителей 117 и 119 образуется сигнал "0", а на выходе инвертора 125 - сигнал "1". Через выход 6 блока 6 и вход 5 блока 5 сигнал "1" подается на второй, управляющий вход триггера 81. На третий тактовый вход триггера 81 подается сигнал от инвертора 124, задержанный элементом 99 на время, большее возможной задержки в переключении усилителей 117 и 119. Если сигнал "1" на втором входе триггера 81 удерживается до момента появления сигнала "1" на выходе 99, триггер 81 переводится в состояние "1". Установка триггера 81 в "1" является свидетельством неисправности аппаратуры - замыкания между шинами "В" и "О" моторных приводов. При переводе триггера 81 в "1" формируется сигнал "0" на выходе ИЛИ-НЕ 95, счетчик 78 принудительно не удерживается в начальном состоянии и, как описывалось, снимается рабочее напряжение "U" с обмоток реле. Сигнал "1" от триггера 81 через выход 3 блока 5 и вход 5 блока 1 подается на один вход ИЛИ 34, в результате чего устройство переходит в начальное состояние без выполнения команды управления.
Возможное замыкание между индивидуальными выходами моторных приводов обнаруживается в паузе между установкой в рабочее состояние одного реле группы 50.1...50.n и одного реле группы 51.1...51.р (в соответствии с поступившей командой управления) и до перевода в рабочее состояние реле 52.В или 52.0. Рассмотрим, для примера, работу устройства при подаче команды управления моторным приводом 107-1, индивидуальная шина которого (точка соединения обмоток 108 двигателя моторного привода 107-1 с переключающим контактом К51.1/2) оказалась замкнутой с индивидуальной шиной моторного привода 107-р. В соответствии с принятой командой управления моторным приводом 107-1 переводятся в рабочее состояние реле 51.1 (выбора первого объекта) и 50.1 (выбора первой группы объектов). В рассматриваемом случае в половине периода сигнала генератора 122, когда напряжение положительной полярности образуется на верхнем (на фиг.7) выводе обмотки W2 трансформатора 130, создается токовая цепь: указанный вывод обмотки W2 трансформатора 130 - обмотка W1 трансформатора 131 - объединенный выход 3 всех узлов 105-1...105-р, 106-1...106-p - последовательно включенные разделительные диоды 112 и 111 узла 105-р - замкнутые переключающий и размыкающий контакты К51.р/2 находящего в нерабочем состоянии реле 51.р - замкнувшиеся индивидуальные шина моторных приводов 107-р и 107-1 - замкнувшийся контакт К51.1/2 - вход 1 узла 105-1 - замкнувшийся контакт 50.1-4 - цепочка замкнутых контактов 50.2-4 (не показан на фиг.7)...-50.n-4, 52.В-3, 52.O-3 - второй вывод обмотки W2 трансформатора 130. Так как сопротивление образованной цепи мало, генерируемое током напряжение в обмотке W2 трансформатора 131 и выходной сигнал фильтра 133 оказываются большими порогового напряжения компаратора 98. В результате сигналы на выходе пикового детектора 85 и на втором входе 84 равны "1". Сигнал на первом входе 84 также оказывается равным "1", так как во включенном состоянии оказывается реле 51.1 группы 51, а выход цепочки из контактов К51.1/1...К50.р/1 отсоединяется от шины "0В". Сигналы на выходе 84 и всех входах 94 становятся равными "0", на его выходе образуется сигнал "1", а на выходе 95 - сигнал "0". Счетчик 78 оказывается чувствительным к тактовым сигналам генератора 77, и через заданный интервал времени на его выходе формируется сигнал "1", а на выходе усилителя 86 - сигнал "0". Как указывалось, с обмоток реле снимается рабочее напряжение "U". Сигнал "1" от 78 воспринимается элементом И 93, на выходе которого образуется сигнал "1", так как и на второй вход 93 подан сигнал "1" с выхода 94. Сигнал "1" от 93 поступает на первый (S) вход триггера 81. Перевод триггера 81 в "1" идентифицирует замыкание между общими или индивидуальными шинами моторных приводов и, как указывалось, приводит к блокировке исполнения команды управления и передаче соответствующего диагностического сигнала.
Устройством также контролируется попадание "земли" на любую общую или индивидуальную шины моторных приводов. Как описывалось, в режиме контроля указанные шины моторных приводов через цепи сигнализации состояния моторных приводов периодически подключаются к шине "0В". Если на одну из шин попадает "земля", шины "0В" и "земля" оказываются соединенными. Вход 7 блока 5 и вход порогового элемента 104 оказываются подключенными к шине "0B" - напряжение на входе 104, равное при отсутствии неисправности "U", становится меньше порога срабатывания стабилитрона 104-2. В результате ток по входной цепи усилителя 88 (от шины "U" через ограничивающий резистор 104-1 и стабилитрон 104-2) не протекает, на его выходе образуется сигнал "1", который поступает на первый (S) вход триггера 82. Сигнал от триггера 82 через усилитель 90 и оптрон 101 поступает на выход 2 группы выходов 4 блока 5 для передачи соответствующего сигнала в ПУ. На второй управляющий вход 82 подается сигнал "0", а на третий тактовый вход - сигнал с выхода триггера 80. При переводе триггера 80 в "1" делается попытка установки триггера 82 в "0", - если к моменту управления "заземление" шин моторных приводов исчезло, триггер возвращается в "0", в противном случае он остается в состоянии "1". Следует отметить, что фиксация попадания "земли" на какую-либо одну шину моторных приводов не вызывает блокировки работы устройства, а лишь передается в ПУ для принятия мер по устранению неисправности, так как попадание "земли" на любую вторую шину приводит к появлению сигнала "замыкание" и блокировке управления моторными приводами.
Если сигнал блокировки управления моторными приводами не сформирован, реле удерживается в рабочем состоянии в течение времени (от нескольких до пятнадцати секунд - в зависимости от типа используемых моторных приводов), достаточного для устойчивого переключения моторного привода из одного состояния в противоположное. При работе моторного привода перемещается исполнительный орган - штанга, которая разъединяет или соединяет контролируемый участок контактной сети с источником питания (штанга и источник питания контактной сети на фигурах не приведены). Время рабочего состояния моторного привода задается с помощью таймера, в состав которого включены счетчик 79, коммутатор 83 и триггер 80. На первый тактовый вход 79 подаются сигналы от генератора 77, на второй управляющий вход - сигнал с инверсного выхода коммутатора 83, а на третий (R) вход - сигнал от переключающего контакта 59 переключателя режима управления моторными приводами - "ручного" или "автоматического", поступающий с выхода 4 блока 4 через вход 4 блока 5. Если сигнал, поступающий на третий вход, равен "0", счетчик оказывается чувствительным к тактовым сигналам и формирует на выходах 1...m код, соответствующий времени подсчета импульсов. Коммутатор 83 формирует на первом выходе сигнал "1" при установке на выходах 1...m счетчика заданной кодовой комбинации, а на втором выходе - сигнал, инверсный сигналу на первом выходе. Прямой сигнал с выхода 83 подается на третий, тактовый вход триггера 80, второй управляющий вход которого подключен к шине "U". В результате триггер переводится в "1" с заданной выдержкой времени относительно начала подсчета импульсов счетчиком 79. Если требуется установить триггер 80 в "1" при поступлении на вход счетчика 79, например, 160 импульсов, коммутатор 83 подключает на выход сигнал со схемы совпадения, фиксирующей сигналы "1" на выходах седьмого (27=128) и пятого выходов счетчика (25=32). Триггер 80 переводится в "1" при поступлении на вход счетчика 128+32=160 импульсов. Выдержка времени таймера оказывается равной  , где ft - тактовая частота генератора 77. Например, при частоте сигналов генератора 40 Гц, выдержка времени равна четырем секундам. При образовании сигнала "1" на первом выходе коммутатора, формируется сигнал "0" на втором выходе. Указанный сигнал поступает на второй управляющий вход счетчика 79 и блокирует его чувствительность к тактовым импульсам, подаваемым на первый вход. Повторно таймер запускается в работу при поступлении и последующем снятии сигнала "1" с третьего входа счетчика 79. Сигнал "1" с прямого выхода триггера 80 подается на третий вход 95 и приводит к образованию на его выходе сигнала "0"; счетчик 78 переводится в рабочее состояние - подсчета импульсов от 77. Как описывалось выше, после образования сигнала "1" на выходе 78, снимается рабочее напряжение "U" с обмоток реле. Реле возвращаются в нерабочее состояние; триггер 80 сигналом "1" от 78, поданным на его четвертый (R) вход, возвращается в состояние "0".
, где ft - тактовая частота генератора 77. Например, при частоте сигналов генератора 40 Гц, выдержка времени равна четырем секундам. При образовании сигнала "1" на первом выходе коммутатора, формируется сигнал "0" на втором выходе. Указанный сигнал поступает на второй управляющий вход счетчика 79 и блокирует его чувствительность к тактовым импульсам, подаваемым на первый вход. Повторно таймер запускается в работу при поступлении и последующем снятии сигнала "1" с третьего входа счетчика 79. Сигнал "1" с прямого выхода триггера 80 подается на третий вход 95 и приводит к образованию на его выходе сигнала "0"; счетчик 78 переводится в рабочее состояние - подсчета импульсов от 77. Как описывалось выше, после образования сигнала "1" на выходе 78, снимается рабочее напряжение "U" с обмоток реле. Реле возвращаются в нерабочее состояние; триггер 80 сигналом "1" от 78, поданным на его четвертый (R) вход, возвращается в состояние "0".
Для повышения надежности работы устройства предусмотрено снятие напряжения питания с обмоток реле выбора вида команды "включить" и "отключить" сразу после перевода триггера 80 в "1", т.е. раньше (на время подсчета импульсов от 77 счетчиком 78), чем происходит обесточивание остальных реле устройства. Чтобы обеспечить корректную подачу и снятие рабочего напряжения с обмоток реле группы 52, в блок 5 вводится элемент И 92. На выходе 92 и на входе усилителя 87 формируется сигнал "1", если переведен в рабочее состояние усилитель 86, в рабочем состоянии находится одно из реле группы 51 (на первый вход блока 5 и на второй вход И 92 подан сигнал "1"), а триггер 80 установлен в состояние "0" (сигнал "1" с инверсного выхода подан на третий вход И 92). На реле блока 52 от усилителя 87 через выход 2 блока 5 подается рабочее напряжение "U" при выполнении следующих условий: исправна аппаратура, нет искажений принятого кода команд переведен в рабочее состояние усилитель 86, установлено в рабочее состояние одно из реле выбора моторного привода в группе, триггер 80 таймера в состоянии "0". При переводе триггера 80 в "1" рабочее напряжение с обмоток реле группы 52 снимается. Благодаря приведенному порядку подачи и снятия рабочего напряжения с обмоток реле разных групп блока 3, после завершения выполнения команды управления высокое рабочее напряжение (220 В) снимается с цепей контроля раньше, чем к моторным приводам подключаются низковольтные цепи контроля. С этой же целью в цепи контроля и сигнализации состояния узлов всех моторных приводов включены разделительные диоды 111 и 112, а в общую для всех моторных приводов цепь - разделительный диод 134. Диоды препятствуют попаданию в цепи управления неработающих моторных приводов высокого напряжения (220 В) от цепи выбранного для управления моторного привода через общие для всех моторных приводов шины "В" и "О. Рассмотрим, для примера, "обходную" цепь, образуемую при выполнении команды "включить" моторный привод 107-1. Трасса возможного попадания рабочего напряжения в "обходную" цепь: верхний (по фиг.7) вывод обмотки W2 трансформатора 132 - замкнувшийся контакт 52.В-3 - замкнувшийся контакт 50.1-4 - вход 1 узла 105-1 - замкнувшийся контакт К51.1/2 - обмотки 108 двигателя моторного привода 107-1 - переключатель К 109 - шина "В" моторных приводов - вход "В" отключенного моторного привода 107-р - переключатель К 109 - обмотки 108 двигателя моторного привода 107-р - замкнутый (не переведенный в рабочее состояние) контакт К51.р/2 - диоды 111 и 112 - общая точка диодов 112 - вывод обмотки W1 трансформатора 131 - диод 134 - замкнувшийся контакт 50.1-3 - замкнутый контакт 52.O-2 - шина "О" моторных приводов - любой переключатель К 109, подключенный к шине "О" - обмотки 108 - контакт К51 и разделительные диоды 111 и 112 указанного узла - точка соединения диодов 112 данного и другого узла, моторный привод которого отключен, - у этого узла диод 111, замкнутый контакт К51, обмотки 108, переключатель К 109 - шина "В" моторных приводов - замкнувшийся контакт 52.В-2 - нижний (по фиг.7) вывод W2 трансформатора 132. Благодаря последовательно - встречному включению пары диодов 111,112 и диода 134 при любой полярности переменного напряжения 220 В ток по указанной "обходной" цепи не проходит, т.е. предотвращается несанкционированное протекание тока в "обходных" цепях.
Диод 134, кроме того, замыкает цепь контроля на первом этапе выполнения команды, когда включены реле выбора группы и объекта управления в группе, но еще не включено реле выбора вида команды. Пример цепи контроля при выполнении команды управления моторным приводом 105-1: нижний (по фиг.7) вывод W2 трансформатора 130 - цепочка контактов 52.O-3, 52.В-3, 50.n-4...50.1-4 - вход 1 узла 105-1 - замкнувшийся контакт К51.1/2 - обмотка 108 двигателя моторного привода 107-1 - переключатель 109 (для любого его положения) - шины "В" и "О" моторных приводов - цепочки контактов 52.В-2...50.n-2 и 52.O-2...50.n-3, замкнувшиеся на общую точку, соединенную с катодом диода 134 - анод диода 134 - верхний (по фиг.7) вывод обмотки W2 трансформатора 130. Видно, что цепь не замыкается через обмотку W1 трансформатора 131, не создается сигнал "1" в обмотке W2 трансформатора 131, а также на выходе фильтра 133, на первом входе компаратора 98, на выходе пикового детектора 85 и втором входе 84. В то же время рассмотренная цепь замыкается через обмотку W1 трансформатора 131 при обнаружении замыкания между индивидуальными шинами моторных приводов, в результате чего сигнал "1" на выходе 85 приводит к блокировке управления моторным приводом. Таким образом, диоды 110, 111, 112, 134 создают основные цепи контроля и блокируют появление "обходных" цепей в режиме контроля и управления моторными приводами.
Рассмотрим работу устройства в режиме "ручного" управления моторными приводами с помощью неарретирных (без фиксации) индивидуальных кнопок.
Для "ручной" подачи команды управления каким-либо моторным приводом кнопка 59 должна быть переведена в положение "ручное", противоположное показанному на фиг.5. Кратковременным нажатием на одну из кнопок узла 56 или 57, соответствующую выбранному моторному приводу, разрывают последовательную цепочку из переключающих контактов кнопок в выбранной группе, в результате чего на общем выходе группы кнопок образуется сигнал "1", а на выходе соответствующего инвертора 64-1...64-n - сигнал "0". Сигналы "1" формируются с помощью резисторов 74, 75, подключенных к выходу "U" источника питания. Через шину 65 и группу 3 выходов блока 4 сформированный сигнал поступает на группу 2 входов блока 2. Через группу разделительных диодов 44.1/2...44.n/2 сигналы поступают в шину 47 и на группу 1 выходов блока 2. Указанная группа выходов соединена через группу 3 входов блока 3 с обмотками реле 50.1...50.n. Как описывалось выше, выбранное реле переводится в рабочее состояние.
Вместе с разрывом последовательной цепочки контактов кнопок группы 56 или 57 замыкается цепь между переключающим и замыкающим контактами выбранной кнопки. Разделительные диоды, входящие в состав узлов 56 и 57, препятствуют созданию "обходных" цепей через объединенные выходы контактов кнопок и обеспечивают формирование сигнала "0" на соответствующем выходе 1...р узлов 56 и 57. Сигнал "0" формируется, если от инвертора 38 блока 1 поступает сигнал "0", т.е. распределитель 24 установлен в позицию "0" и формирует сигнал "1" на соответствующем выходе. Сигнал "0", поданный на первый вход ИЛИ-НЕ 69, вызывает появление сигнала "1" на выходе 69, так как на второй вход 69 также подан сигнал "0" от формирователя импульсов 68. Сигнал "1" от 69 усиливается и инвертируется первым усилителем 63. Рассмотрим для примера работу устройства при подаче команды с помощью кнопки К56.1- выбора первой группы и первого моторного привода в группе. При нажатии на кнопку К56.1 создается цепь управления реле 50.1 группы 50.1...51.n: "U" (от усилителя 86) - обмотка 50.1 - вход группы 3 входов блока 3 - группа 1 выходов (шина 47) узла 44 - анод-катод диода 44.1/2 - вход 1 шины 65 - группа входов 2 блока 2 - группа выходов 3 (шина 65) блока 4 - выход инвертора 64-1 - шина "0В". Создается также цепь управления реле 51.1 группы реле 51.1...51.р: "U" (от усилителя 86) - обмотка реле 51.1- вход 1 группы входов 4 (шина 48) блока 4 - группа 2 выходов блока 2 - анод-катод диода 45.1/2 - вход 1 группы входов 5 (шина 60) блока 2 - выход 1 группы выходов 1 блока 4 - анод-катод диода Д56.1 - замкнувшаяся цепь между замыкающим и переключающим контактами К56.1 - анод-катод диода 61 - выход усилителя 63 - шина "0В". После выбора группы объектов и объекта в группе нажатием на кнопку 58.В или 58.0 задается вид команды управления "включить" или "отключить". Рассмотрим цепь управления при подаче, например, команды "включить" с помощью кнопки 58.В узла 58: "U" (от усилителя 87) - обмотка реле 52.В - шина "В" группы выходов 5 (шина 49) блока 3 - выход "В" группы 3 выходов блока 2 - анод-катод диода 46.В/2 - вход "В" группы 8 входов (шина 66) блока 2 - выход "В" группы 2 выходов блока 4 - замкнувшаяся цепь между замыкающим и переключающим контактами 58.В - выход усилителя 63 - шина "0В".
После перевода реле в рабочее состояние устройство продолжает работать аналогично рассмотренному выше режиму подачи команды управления "автоматически", за исключением процедур запуска в работу таймера. В автоматическом режиме приема и выполнения команды таймер запускается при переводе в рабочее состояние одного из реле узла 52 - разрыв последовательной цепочки из контактов К52.В/1 и К52.O/1 приводит к появлению сигнала запуска формирователя импульсов 67. Выходной сигнал 67 через замкнутую цепь между замыкающим и переключающим контактами кнопки 59 (положение, соответствующее режиму "автоматической" подачи команды управления), выход 4 блока 4 и вход 4 блока 5 подается на третий (R) вход счетчика 79 блока 5. На время действия импульса от 67 счетчик удерживается в начальном состоянии, после чего он оказывается чувствительным к импульсам от генератора 77, поступающим на первый, тактовый вход 79. Время удержания реле в рабочем состоянии и время, установленное для переключения моторного привода в состояние, соответствующее команде управления, равно времени до срабатывания триггера 80 таймера. Как отмечалось выше, очередной цикл работы таймера начинается после приведения счетчика 79 в начальное состояние, т.е. при подаче очередной команды управления.
В режиме "ручного" управления очередной цикл работы таймера начинается после установки в рабочее положение одного из реле 51.1...51.р и размыкания цепочки из контактов К51.1/1...К51.1р/1. Сигналом "1" от указанной цепочки (сформированным с помощью резистора 70), запускается в работу формирователь 68 импульсов. Выходной сигнал "1" от формирователя подается на второй вход ИЛИ-НЕ 69, в результате сигнал на выходе 69 становится равным "0", а на выходе 63 - "1". Сигнал "1" от 63 через замкнутую цепочку из контактов 58.В и 58.0, кнопку 59 и четвертый выход блока 4 подается на третий (R) вход счетчика 79, чем запускается в работу таймер. Отметим, что в режиме "ручного" управления сдвиг по времени между нажатием на одну из кнопок узлов 56 или 57 и кнопку выбора вида команды управления 58.В или 58.O не фиксирован и зависит от действий оператора, подающего команду. В то же время необходимо обеспечить формирование стандартного (заданного) времени работы моторного привода, не зависящего от действий оператора. Для этого в момент нажатия на кнопку 58.В или 58.O размыкается цепь между выходом усилителя 63 и кнопкой 59, а на выходе 4 блока 4 формируется (с помощью резистора 71) сигнал "1". Этим сигналом счетчик 79 повторно переводится в начальное состояние. После отпускания кнопки сигнал "1" на выходе 4 блока 4 исчезает, а счетчик вновь оказывается чувствительным к тактовым импульсам счетчика 77. Таким образом, время удержания моторного привода в рабочем состоянии не зависит от действий оператора. Если оператор не нажал на кнопку выбора вида команды управления за время работы таймера, устройство автоматически приводится в начальное состояние без выполнения команды управления.
Показано, что предложенное устройство реализует:
- двухцветное отображение установленного состояния моторных приводов,
- динамический контроль исправности аппаратуры, в том числе наличие замыкания между общими для всех моторных приводов шинами "включить" и "отключить", а также между индивидуальными шинами разных моторных приводов,
- попадание "земли" на любую шину связи устройства с моторными приводами,
- диагностику цепей формирования контрольных сигналов,
- повышение помехозащищенности цепей контроля использованием относительно высокочастотных сигналов контроля,
- возможность проведения операций управления моторными приводами в "автоматическом" и "ручном" режимах с использованием однотипных алгоритмов работы и проверок для обоих режимов,
- формирование сигналов, отображающих состояние моторных приводов и результат контроля исправности аппаратуры, и их передачу в пункт управления,
- гальваническое отделение цепей формирования сигналов состояния от цепей управления,
- использование шин связи устройства с моторными приводами, по которым подаются высоковольтные сигналы управления, для формирования сигналов установленного состояния моторных приводов,
- формирование условно корреляционного биимпульсного кода, который позволяет фиксировать неисправность цепей связи моторных приводов с устройством, идентифицировать вид и локализовать адрес неисправной цепи.
Приведенные характеристики и методы их реализации доказывают выполнение поставленной цели изобретения - повышение достоверности и расширение информационных и функциональных возможностей устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИЕМА КОМАНД УПРАВЛЕНИЯ | 2002 |
|
RU2237287C2 |
| Устройство для предварительной проверки транзисторов | 1982 |
|
SU1101762A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ДВУХПОЗИЦИОННЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2244344C2 |
| Устройство дистанционного управления угольным комбайном с пневмоприводом | 1984 |
|
SU1190029A1 |
| Устройство для реакции на аварию в схеме управления потребителями электроэнергии | 1990 |
|
SU1795495A1 |
| РЕЛЕ ВРЕМЕНИ | 1996 |
|
RU2124265C1 |
| Резервированное устройство для управления электропневмоклапанами | 1989 |
|
SU1647512A1 |
| Устройство автоматизированного контроля | 1987 |
|
SU1525680A2 |
| Устройство для сигнализации о состоянии механизмов | 1990 |
|
SU1800471A1 |
| Устройство для управления и контроля положения шахтного регулятора воздушных потоков | 1986 |
|
SU1432244A1 |
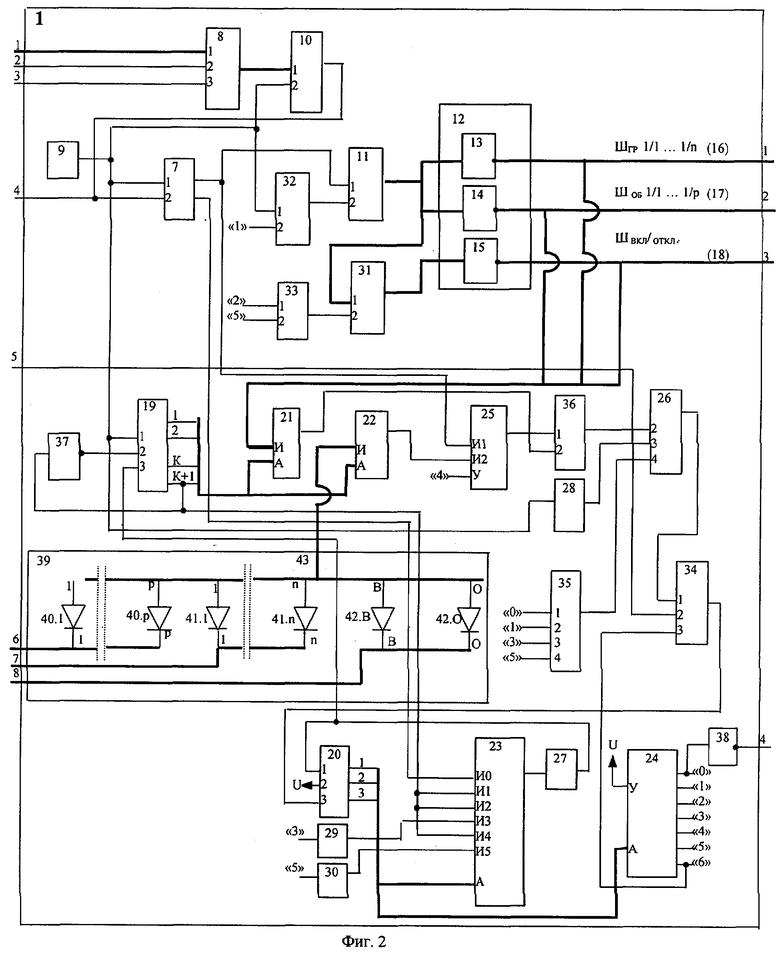

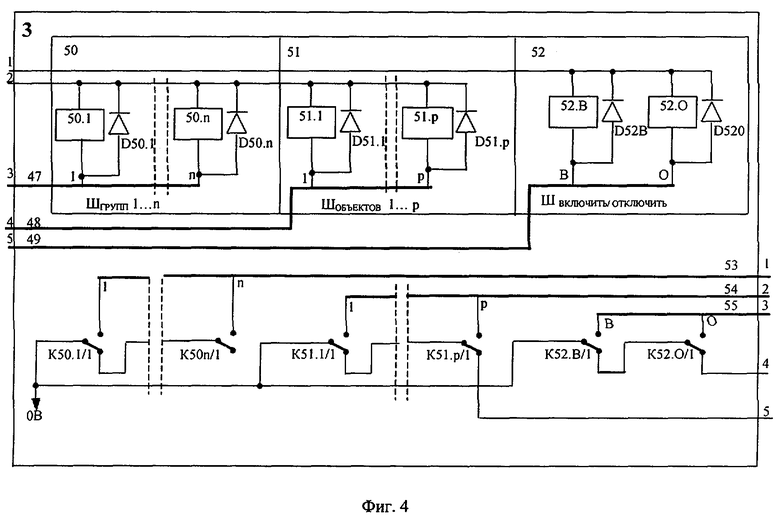
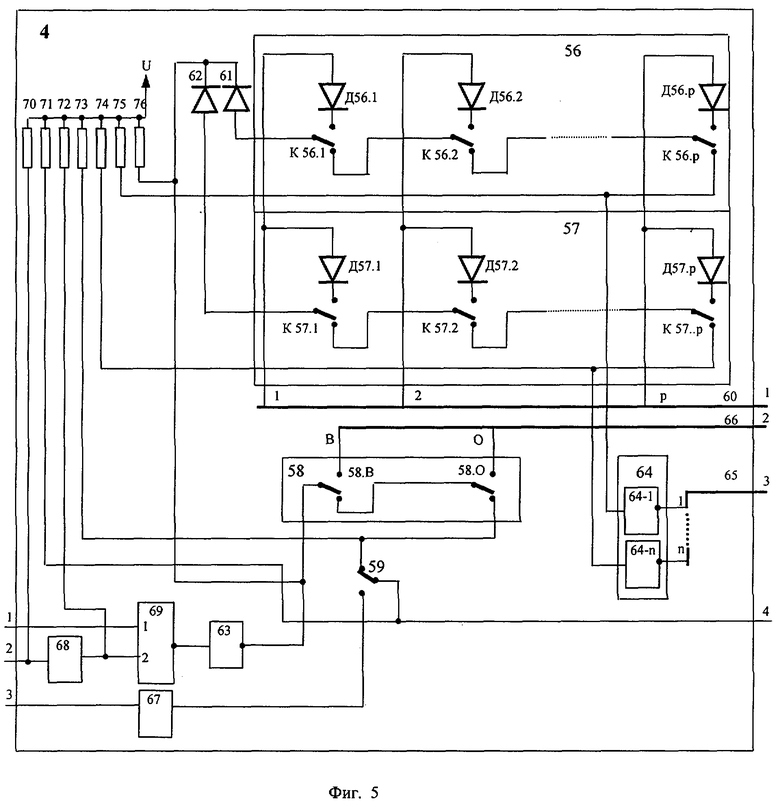

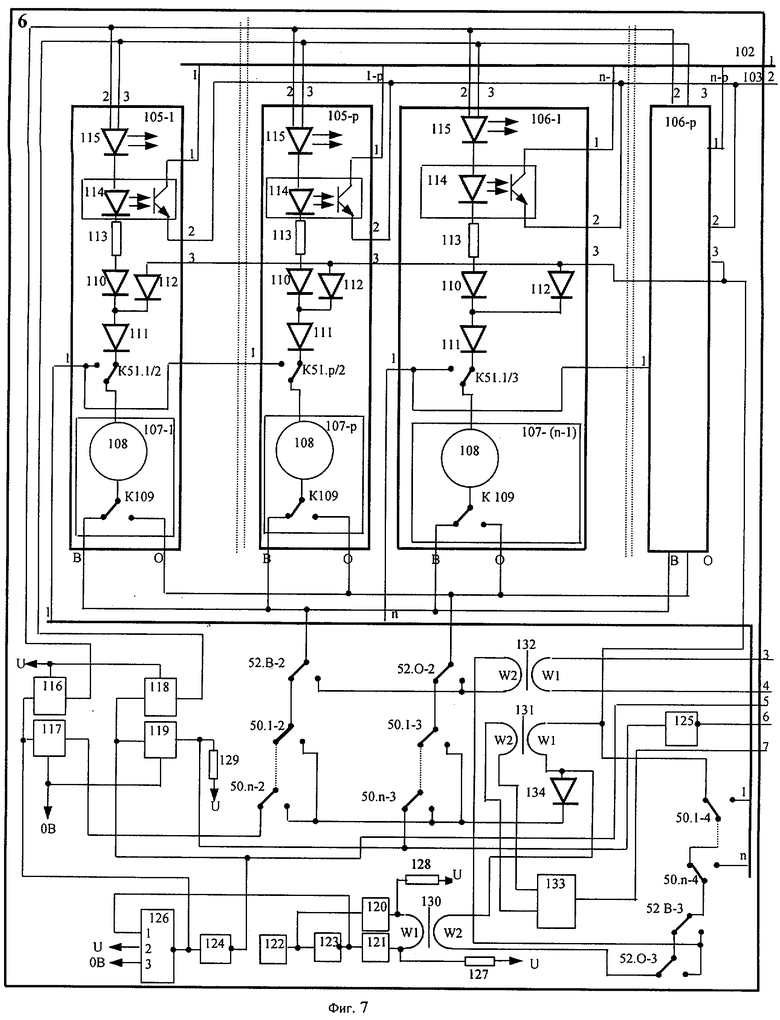
Изобретение относится к информационно-управляющим комплексам для автоматизированных систем управления электрифицированными участками железных дорог. Технический результат заключается в повышении достоверности, расширении информационных и функциональных возможностей устройства. Команды управления представляются в виде координат - позиционных (распределительных) кодов номера группы объектов управления, номера объектов управления в группе и вида команды управления «включить» и «отключить». Блоки сигнализации и контроля устройства реализованы так, что состояние каждого моторного привода отображается корреляционным биимпульсным кодом - парой сигналов «10» при включенном и «01» - при отключенном состоянии моторного привода. Одновременно с кодированием состояния моторного привода проводится диагностика работоспособности аппаратуры и цепей связи устройства с территориально рассредоточенными моторными приводами, в результате чего корреляционный биимпульсный код преобразуется в условно корреляционный. Условно корреляционный биимпульсный код содержит, кроме двух указанных выше, две дополнительные кодовые комбинации - «11» - для фиксации замыкания между общими для всех моторных приводов шинами «включить» и «отключить» или индивидуальными шинами разных моторных приводов, и «00» - для фиксации разрывов диагностируемых цепей связи моторных приводов с устройством. 7 ил.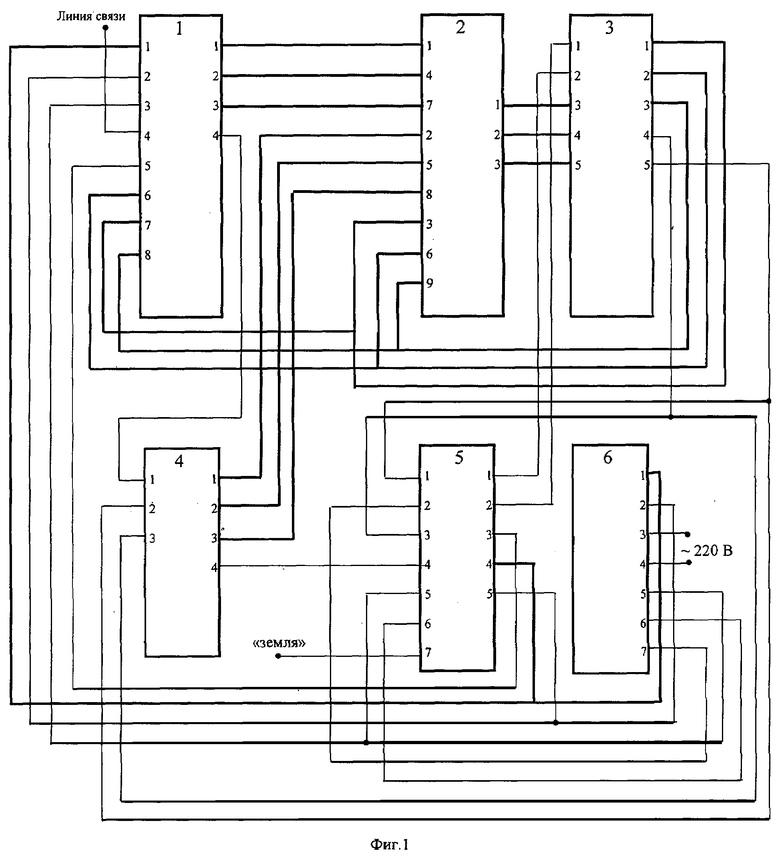
| Устройство для приема команд телеуправления | 1987 |
|
SU1441436A1 |
| RU 2132573 C1, 27.06.1999 | |||
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| 0 |
|
SU247883A1 | |

