Изобретение относится к области оптико-электронных обзорных систем и может быть использовано при создании систем обзора, наблюдения, в том числе авиационных.
Во время выполнения поисковых, спасательных работ в условиях ограниченной визуальной видимости, ночью, для поиска заданных объектов широко используются приборы ночного видения (ПНВ). Такие приборы оператор держит в руках либо они устанавливаются непосредственно на голове (защитном шлеме) оператора - так называемые очки ночного видения. Оператор, находясь на подвижном транспортном средстве, например вертолете, наблюдает внешнее пространство через ПНВ, независимо от направления движения транспортного средства, управление которым производится водителем с помощью навигационных приборов либо системы обзора, поле зрение которой ориентировано строго по направлению полета. При обнаружении искомого объекта оператор должен пояснить водителю транспортного средства, в каком направлении необходимо изменить направление движения, что затруднено, т.к. визуальной видимости нет, а в полях зрения оператора и летчика различные ориентиры.
ПНВ 1 выполняется на основе электронно-оптического преобразователя (ЭОП) 2 с блоком 3 высоковольтного напряжения. Малогабаритный ЭОП 2 состоит из канального электронного умножителя (КЭУ) 4, фотокатода 5, люминесцентного экрана 6. ПНВ 1 также содержит объектив 8, блок визирования - окуляр 9. Фотокатод 5 расположен в фокальной поверхности объектива 8, а экран 6 расположен в фокальной поверхности окуляра 9. Блок 3 высоковольтного напряжения формирует напряжение питания КЭУ 4, а также фотокатода 5 и экрана 6 (анод). Более детально ЭОП описан в книге (Изнар А.П. Электронно-оптические приборы. М., Машиностроение, 1977 г., стр.11, 79). В настоящее время в ПНВ третьего поколения используются фотокатоды на основе арсенида галлия, обеспечивающие высокую чувствительность на длине волн λ=0,6...0,94 мкм.
Для определения направления поля зрения оптических визиров 25, применяемых в условиях визуальной видимости, в том числе и установленных на защитном шлеме 22 летчика вертолета и оперативной передачи данных его ориентации в бортовые системы управления и индикации, часто используют системы дистанционного определения ориентации удаленных объектов (ДОО). Такие системы содержат реперный узел 11, размещаемый на подвижном объекте (защитном шлеме) 22, а также измерительный блок 10, размещаемый на неподвижном объекте, например на борту транспортного средства, содержащий датчик положения 13 реперного узла и формирователь углов целеуказания 21. Построение систем ДОО, в основном, производится по оптико-электронной схеме, например, патент США №3375375. а также по схеме использующей электромагнитное излучение радио диапазона, например, патент США №4314251.
Применение систем определения ориентации, выполненных на основе датчиков электромагнитных полей, ограничено их зависимостью от изменений внешнего электромагнитного поля (работа РЛС, внесение магнитных масс), поэтому наиболее широко применяются системы, выполненные по оптико-электронной схеме.
В оптико-электронной системах ДОО обычно для построения реперного узла 11 используют набор ИК источников излучения 12, в качестве которых используют излучающие диоды, пространственная ориентация которых определяется датчиком положения 13, а именно блоком 14 фотодетекторов совместно с блоком определения данных ориентации 15, и затем используется для формирования углов целеуказания блоком 21. Оптико-электронные системы обычно строятся на основе оптопары: мощный быстродействующий ИК-излучающий диод, например диод 3Л123, с основным спектром излучения λ=0,94 мкм (источник реперного узла) и фотодиодов на основе кремния (фотодетекторы датчика 13 положения реперного узла).
В этом случае излучение от реперных источников, применяемых в системе ДОО, засвечивает ПНВ, что резко снижает контраст изображения вплоть до полного нарушения работы ПНВ.
Таким образом, построение системы обзора на основе прибора ночного видения и оптико-электронной системы дистанционного определения ориентации ограничено следующим фактором: использованием одного диапазона спектра оптического излучения, ПНВ и оптико-электронной системой ДОО, что не позволяет им работать совместно.
В качестве прототипа применяется легкая универсальная система ночного видения LUNOS (Lightweight Universal Night Observation System) фирмы DELFT Sensor Systems (Бельгия). Система LUNOS представляет собой прибор ночного видения на основе электронно-оптического преобразоватепя III поколения с канальным электронным умножителем. Данная система обладает существенным недостатком - не обеспечивает возможность одновременной работы системы ночного видения и оптико-электронной нашлемной системы целеуказания в связи с засветкой фотокатода электронно-оптического преобразователя ПНВ излучением реперных источников НСЦ (блики от элементов кабины).
Целью предлагаемого технического решения по созданию оптико-электронной системы целеуказания и обзора, содержащей прибор ночного видения, выполненный на основе ЭОП, и оптико-электронной системы дистанционного определения ориентации, является обеспечения совместной работы прибора ночного видения и оптико-электронных системы дистанционного определения ориентации.
Поставленная цель достигается тем, что в системе целеуказания и обзора, содержащей ПНВ, включающий последовательно соединенные объектив, блок преобразования входного изображения и блок визуализации изображения, реперный узел, а также устройство дистанционного определения ориентации реперного узла и формирователь углов целеуказания, реперный узел выполнен в виде набора из М реперных элементов, где М≥1, которые конструктивно совмещены с прибором ночного видения так, что вектор ориентации расположения реперных элементов ориентирован относительно оптической оси прибора ночного видения, устройство дистанционного определения ориентации реперного узла содержит средство оптической локации реперных элементов, а в состав системы дополнительно введены синхронизатор, блок управления работой прибора ночного видения, блок управления работой устройства дистанционного определения ориентации реперного узла.
Блок управления работой прибора ночного видения содержит блок формирования управляющих сигналов и коммутатор.
Блок управления работой прибора ночного видения содержит блок управления сменой изображения.
Средство оптической локации содержит последовательно соединенные датчик ориентации реперных элементов и блок определения ориентации реперного узла.
Реперные элементы выполнены в виде точечных источников излучения, например инфракрасных излучающих диодов, а датчик ориентации реперных элементов содержит фотоприемный углоизмерительный блок, вход которого оптически сопряжен с зоной расположения точечных источников излучения.
Блок управления работой устройства дистанционного определения ориентации реперного узла содержит коммутатор питания точечных источников излучения.
Блок определения ориентации реперного узла содержит блок расчета параметров ориентации, запоминающее устройство и блок запрета перезаписи.
Решение с такой совокупностью признаков, как у заявляемого, среди известных в науке и технике на данный момент автором не обнаружено. Именно использование новых блоков в структуре оптико-электронной системы целеуказания и обзора позволяет предлагаемому техническому решению достичь новых положительных качеств и поставленной цели.
Изложенная сущность предлагаемого устройства поясняется следующим пояснением и чертежами, где изображены:
Фиг.1 - блок-схема существующей системы обзора и целеуказания.
Фиг.2 - блок-схема предлагаемой системы обзора и целеуказания.
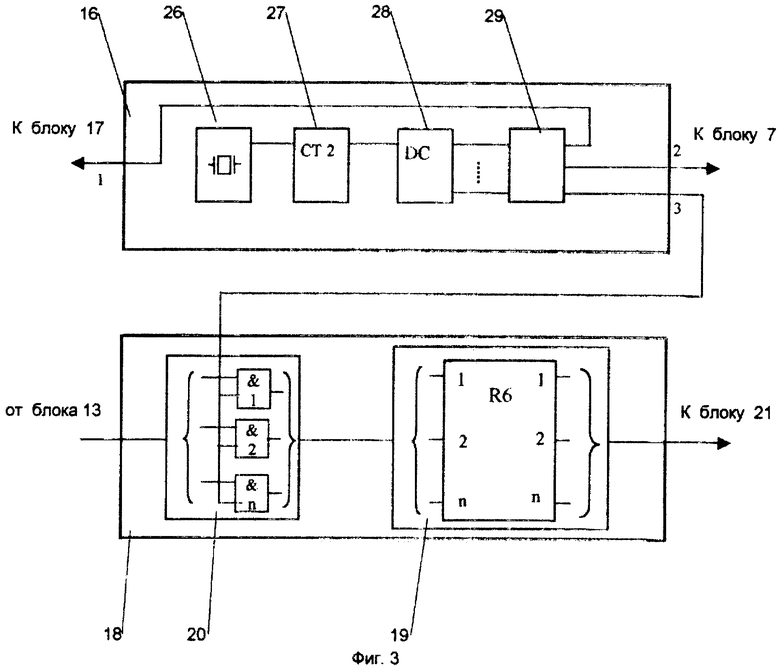
Фиг.3 - блок-схема примера реализации генератора синхронизации и блока запоминания сигналов пеленгов.
Фиг.4 - диаграмма работы прибора ночного видения и устройства определения ориентации.
Предлагаемая оптико-электронная система целеуказания и обзора содержит прибор ночного видения 1, содержащий усилитель яркости изображения (ЭОП) 2 с блоком 3 запитки канального электронного умножителя 4, фотокатода 5, люминофорного экрана 6, коммутатор 7 запитки (блок управления) канального электронного умножителя 4, а также оптический объектив 8, совмещенный с фотокатодом 5, и оптический визир 9, сопряженный с люминофорным экраном 6, а также устройство 10 дистанционного определения ориентации реперного узла 11, содержащего набор реперных точек 12 (ИК-источников излучения), имеющее в своём составе датчик 13 положения реперного узла, исполненный в виде блока фотодекторов 14 и блока определения данных ориентации 15, синхронизатор 16, блок управления работой реперных источников 17, блок управления перезаписью 18 данных ориентации реперного узла, выполненный в виде блока хранения 19 сигналов датчика положения реперного узла на время отключения реперных ИК-источников излучения, устройства 20 запрета перезаписи углов-пеленгов, блок формирования углов целеуказания 21.
Реперный узел 10 может содержать в своём составе 3 реперных источника, в этом случае ориентация реперного узла задается нормалью к плоскости расположения реперных источников. Реперный узел 10 конструктивно сопряжен с прибором ночного видения, чтобы выдержать заданный угол между нормалью к плоскости, в которой размещены отдельные реперные точки реперного узла (ИК-излучающие диоды), и оптической осью объектива 8 ПНВ 1.
Размещение сборки: прибор ночного видения 1 и реперный узел 11, может быть произведено на защитном шлеме 22 летчика.
В качестве примера практической реализации вновь введенных блоков на фиг.2 представлена одна из возможных схем коммутатора 7 запитки КЭУ в виде оптрона, состоящего из фотодиода 23 и излучающего диода 24. Возможно применение и других типов оптронов (транзисторных, тиристорных и т). Коммутатор 7 может быть выполнен и на базе других типов коммутирующих элементов (реле, транзисторы). В зависимости от величины коммутируемого напряжения возможно применение оптронов типа АОР103, АОУ101 и пр. (либо на регистрах серии 765).
Коммутатор 17 запитки (блок управления работой) реперных излучателей, возможная схема реализации которого представлена на фиг.2, представляет собой многоканальную (по числу реперных излучателей) коммутирующую схему из К1...Кn ключей, которые по сигналу управления подают напряжение на запитку n излучателей 12. При практической реализации может быть выполнен на базе транзисторов типа 2Т825, 2Т837 и др.
Синхронизатор 16 может быть выполнен на базе логических элементов серии 155, 564. Он представляет собой устройство, формирующее несколько последовательностей импульсов. Структурная схема генератора 16 при возможной практической реализации представлена на фиг.3.
Синхронизатор 16 состоит из кварцевого генератора 26, счетчика импульсов 27, дешифратора 28 и формирователя 29 заданной последовательности на элементах комбинационных логических схем И, ИЛИ. Синхронизатор 16 может быть выполнен на цифровых логических микросхемах серии 155, 133, 564, 765. Например, 564 ЛА7, 564 ЛЕ5, 564 ИЕ2 (счетчик), 564 ИД3 (дешифратор).
Блок запрета перезаписи 20 представляет собой ключевую схему, которая пропускает или нет сигналы углов-пеленгов по сигналу управления синхронизатора 16.
Блок запрета перезаписи может быть выполнен, например, на интегральных аналоговых ключах серии 590, 591 либо на цифровых логических микросхемах серии 133, 564, 765, как это показано на фиг.3.
Оперативное запоминающее устройство 19 может быть выполнено на микросхемах ОЗУ типа 541 РУ5, 132 ГУ6 либо на регистрах серии 765, 564, 133 типа 765 ИР9, 564 ИР6 и ДР.
При включении системы генератор синхронизации 16 вырабатывает две последовательности импульсов (см. фиг.4а, б), длительность которых определяет время активной работы устройства 13 определения ориентации шлема (см. последовательность фиг.4а) и ПНВ 11 (см. последовательность фиг.4б), а также формируют последовательность импульсов (см. фиг.4в), служащую для управления блоком 20 запрета перезаписи углов-пеленгов на период выключения реперных источников излучения 12.
При поступлении импульса из последовательности а) фиг.4 с выхода 1 синхронизатора 16 на управляющий вход коммутатора 17 замыкаются контакты К1, К2, Кn, и реперные источники 12 (например, излучающие ИК-диоды) подключаются к выходу блока 15 формирования данных ориентации реперного узла (например, углов-пеленгов на реперные источники), количество связей соответствует количеству реперных точек, по которому выдается напряжение для запитки каждого конкретного ИК-диода. Излучения реперных источников, последовательность г) фиг.4 фиксируется фотоприемной системой 14 устройства определения ориентации, сигналы с выхода которой поступают на блок 15 формирования сигналов углов-пеленгов, где происходит идентификация полученных сигналов соответствующему реперному источнику, так как известно, какой диод излучает в данный момент. С выхода блока 15 сигналы углов-пеленгов в виде набора импульсов поступают через открытые ключи блока 20 на соответствующий регистр счетчиков устройства 19 запоминания сигналов-пеленгов. Формирователь углов целеуказания 21, например, вычислительное устройства, обращаясь к регистрам устройства 19 запоминания углов-пеленгов, получает значение углов-пеленгов, на основании которых рассчитываются значения углов целеуказания. При окончании импульса, поступающего с выхода 1 генератора 16 (последовательность а) на фиг.4), размыкаются контакты коммутатора 17 и реперные точки 12 отключаются от блока 15 формирования пеленгов, при этом на выходе блока 15 формирования сигналов углов-пеленгов могут устанавливаться произвольные значения чисел импульсов (от максимального значения до нулевого).
Для исключения возможности этих неправильных значений для расчетов также неправильных углов целеуказания на управляющий вход блока 20 запрета перезаписи поступает импульс с выхода 3 синхронизатора 16 (последовательность в) фиг.4), который запрещает перезапись импульсов с блока 15 формирования в блок 19 запоминания сигналов углов-пеленгов. Таким образом, во время отключения реперных точек 12 в регистрах блока 19 сохраняются значения углов-пеленгов, определённых в предыдущем цикле работы устройства 1 при включенных РТ, а значит, будут выдаваться правильные значения сигналов целеуказания
При поступлении импульса из последовательности б) фиг.4 с выхода 2 синхронизатора 16 на управляющий вход коммутатора 7, т.е. на управляющий вход оптрона, при этом замыкается исполнительная цепь оптрона (открывается диод 23) и напряжение с выхода блока 3 подается на запитку КЭУ 4, который во время работы устройства 10 был обесточен. С фотокатода 5, который обладает постоянной времени 1.10-8...1.10-9 с, электроны фотоэмиссии, пространственное распределение плотности электрического тока (последовательность Д) фиг.4) которых соответствует засветке фотокатода, усиливаются с помощью КЭУ 4, постоянная времени которого 1.10-8...1,10-9 с, и поступают на люминесцентный экран 6. В результате люминесценции на поверхности экрана 6 возникает изображение, которое наблюдается через окуляр оптического блока 9. Время возникновения изображения определяется скоростью процесса рекомбинации электронов валентных орбит атомов люминофора, т.е. время порядка 1.10-7...1.10-8 с. При окончании импульса последовательности Б) размыкаются положительная цепь оптрона блока 7, напряжение снимается с КЭУ 4, т.е. прекращается излучение, поступающее на вход объектива 8. На люминесцентном экране 6 будет наблюдаться изображение за счет послесвечения люминофора, т.е. на протяжении времени порядка 0,01...0,05 с (график изменения яркости Е) фиг.4).
Оператор визирует с помощью окуляра оптического блока 9 изображение на экране 6 ЭОП, сформированное во время работы КЭУ 4 за время t≤1.10-7 с и сохраняемое при выключении КЭУ 4 за счет использования послесвечения люминофора, обуславливаемое его инерционностью t≤1.10-2 с. Время выключения КЭУ 4, т.е. работы устройства определения ориентации защитного шлема, должно быть меньше, чем постоянная времени инерционности (затухания яркости люминофорного экрана 6 и постоянная времени глаза человека t≤1.10-2 с). Постоянная времени оптико-электронного устройства определения ориентации шлема может быть оценена значением постоянной времени оптопары: ИК-диод реперного узла - фотодетектор блока 14, которая составляет t≤1.10-6 с, что соответствует заданному требованию.
Таким образом, по сравнению с прототипом предлагаемая оптико-электронная система целеуказания и обзора позволяет осуществить совместную работу прибора ночного видения и оптико-электронной системы дистанционного определения ориентации, т.е. осуществить визирование пространства в условиях ограниченной видимости с одновременной передачей направления на обнаруженные объекты (ориентации поля зрения прибора ночного видения) в систему управления и индикации транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| НАШЛЕМНАЯ СИСТЕМА ИНДИКАЦИИ | 1992 |
|
RU2091837C1 |
| АКТИВНО-ИМПУЛЬСНЫЙ ТЕЛЕВИЗИОННЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 2014 |
|
RU2589947C1 |
| АКТИВНО-ИМПУЛЬСНЫЙ ТЕЛЕВИЗИОННЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 2016 |
|
RU2645122C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СТРЕЛЬБЫ ГРУППЫ ПЕРЕНОСНЫХ ЗЕНИТНО-РАКЕТНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289083C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРИЦЕЛАМИ И ЦЕЛЕУКАЗАТЕЛЯМИ | 2009 |
|
RU2460961C1 |


Изобретение относится к области приборостроения и измерительной техники, а именно к технике создания приборов ночного видения. Технический результат - расширение функциональных возможностей. Для достижения данного результата реперный узел конструктивно совмещен с прибором ночного виденья так, что вектор ориентации расположения реперных элементов ориентирован относительно оптической оси прибора ночного видения. При этом в состав системы дополнительно введены синхронизатор, блок управления работой прибора ночного видения, блок управления работой устройства дистанционного определения ориентации реперного узла. Причем синхронизатор первым выходом соединен через блок управления работой прибора ночного видения с прибором ночного видения, а вторым выходом соединен через блок управления работы устройства дистанционного определения ориентации реперного узла с входом устройства дистанционного определения ориентации реперного узла. 4 з.п. ф-лы, 4 ил.
| US 4314251 А, 02.02.1982 | |||
| US 3375375 А, 26.03.1968 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Изнар А.П | |||
| Электронно-оптические приборы | |||
| М.: Машиностроение, 1977, с.11, 79 | |||
| БИНОКУЛЯРНАЯ ЗРИТЕЛЬНАЯ ТРУБА НОЧНОГО ВИДЕНИЯ | 1998 |
|
RU2143717C1 |

