Изобретение относится к области специального оптического приборостроения и, в частности к системам дистанционного определения ориентации подвижных объектов, и может быть использовано при создании систем робототехники, а именно устройств, определяющих положение рабочего органа манипуляторов, а также систем управления, где используются данные о разворотах головы оператора, систем визуализации тренажеров на основе нашлемного индикатора, систем виртуальной реальности и т.п.
В настоящее время широко применяются для наведения различных управляемых подсистем переключения органов управления без использования рук за счет использования данных о разворотах головы оператора, так называемые нашлемные системы целеуказания.
Известны устройства, которые используются при построении систем целеуказания, например патент США 3 375375.
Устройство содержит установленные на защитном шлеме оптический блок вывода индикации в поле зрения летчика и набор N реперных знаков - реперных точек, где N ≥ 2, например фотодетекторов, которые размещаются на линии коллинеарной оптическим осям блока вывода индикации, а также размещаемые на базовом блоке (неподвижном основании) М оптико-электронных локационных блоков, где M≥2, сканирующих световыми пучками пространство нахождения защитного шлема, определяющие углы-пеленги на реперные точки, электронный блок с вычислителем формирования данных ориентации подвижного объекта.
В качестве реперных знаков могут быть использованы как контрастные отметки (точки) на поверхности подвижного объекта, видимые в окружающем свете, это могут быть элементы специальных рисунков (геометрические фигуры, их части - точки, отрезки прямых, штрихи и т.п.), нанесенных на поверхность защитного шлема, так называемые пассивные реперные знаки, так и активные реперные элементы (точки) - источники излучения.
В таких устройствах производится определение углов-пеленгов на реперные точки, затем определение пространственных координат реперных точек, используя которые, определяется ориентация оптического блока вывода индикации, а значит, и подвижного объекта (защитного шлема). Данные ориентации подвижного объекта - сигналы целеуказания - используют для управления различными системами. Точность сигналов целеуказания определяется как точностью определения пространственных координат реперных точек, так и точностью взаимной ориентации между реперными точками и оптическим блоком вывода индикации.
В данном устройстве, где оптический блок расположен на передней части шлема оператора, а реперные точки - на боковых частях шлема, когда необходимо выдерживать параллельность оптической оси оптического блока и линии, на которой устанавливаются реперные точки, точность формирования сигналов целеуказания во многом определяется стабильностью их взаимной ориентации. Конструкция типового шлема летчика обеспечивает как его прочность, так и достаточную упругость для обеспечения индивидуальной подгонки шлема. Упругость шлема приводит в процессе его эксплуатации к смещениям отдельных участков шлема относительно друг друга, что приводит к их взаимному угловому развороту на величину Δ≥1o, что не позволяет данному устройству осуществлять целеуказание для высокоточных систем, например для систем наблюдения с полем зрения ≈1o. Для обеспечения требований к системе целеуказания по точности необходимо ужесточать требования к жесткости конструкции шлема, например вводить дополнительные кронштейны между местами установки оптического блока и реперных точек, что увеличивает массу размещаемого оборудования на шлеме, а значит, ухудшает условия работы летчика.
В устройстве также необходимо использовать два комплекта оптико-электронных локационных блоков, по одному с каждой боковой стороны от оператора, каждый из которых обеспечивает определение сигналов целеуказания только в половине диапазона работы устройства, что увеличивает состав оборудования в два раза.
Известно устройство, описанное в патенте Великобритании 2002986 и взятое в качестве прототипа, блок-схема которого представлена на фиг.1, содержит на каждой боковой стороне подвижного объекта 1 (на поверхности защитного шлема оператора) не менее двух реперных знака 2, в качестве которых использованы точечные источники излучения, причем два реперных излучателя располагаются на линии, коллинеарной вектору ориентации подвижного объекта, оптический блок вывода индикации 3, а на неподвижном объекте (боковых частях кабины самолета) установлены датчики средства оптической локации - оптико-локационные блоки 4 и 5. В состав известных устройств входят также блок формирования данных локации 6 и блок формирования сигналов целеуказания 7. Оптико-локационные блоки 4 и 5 своими входами оптически сопряжены с реперными точками, а выходами соединены с блоком формирования сигналов целеуказания 7, который содержит последовательно соединенные блок 8 определения координат реперных точек и блок 9 расчета сигналов целеуказания.
Недостатком известного устройства-прототипа является:
- большой суммарный габаритный размер и масса оборудования на защитном шлеме, когда оптический блок вывода индикации и реперные элементы разнесены по поверхности защитного шлема, а точность их взаимной увязки обеспечивается за счет ужесточения требований к конструкции шлема;
- использование двух оптико-локационных блоков, каждый из которых состоит из нескольких узлов, объединенных в единую конструкцию и определяющих данные пространственного положение реперных точек (источников излучения), что обеспечивает определение ориентации защитного шлема, но только при развороте защитного шлема в сторону оптико-локационного блока, т.е. в системе предусматривается использование не менее двух комплектов оптико-локационных блоков.
Размещение реперных элементов (реперных излучателей) на боковых частях защитного шлема приводит также к необходимости установки оптико-локационных блоков на боковых частях кабины летательного аппарата, которые не имеют жесткой привязки к системе координат летательного аппарата, например фонарь кабины, что усложняет взаимную юстировку.
Задача заявляемого технического решения: создание оптико-электронной нашлемной системы целеуказания с малогабаритным нашлемным узлом (реперно-индикаторной сборкой), обеспечивающей возможность его установки на стандартный защитный шлем летчика, при этом сама система должна иметь возможность установки на летательный аппарат с упрощенной схемой привязки к системе координат летательного аппарата.
Сущность предлагаемого технического решения заключается в том, что реперные элементы конструктивно совмещены с оптическим блоком индикации (размещаются непосредственно на его корпусе), что обуславливает минимальные габаритно-весовые параметры реперно-индикаторной сборки, размещаемой на защитном шлеме, а оптико-локационный блок, выполненный в виде двух разнесенных на некоторое расстояние узлов, устанавливается перед летчиком. В связи с использованием одного оптико-локационного блока, каждый из узлов которого определяет только часть данных, необходимых для определения координат реперных точек, повышаются требования к точности установки этих узлов и к апертуре излучения реперных источников (ее расширению), при этом необходимая работоспособность системы обеспечивается за счет проведения корректировки параметров установки оптико-локационных блоков и выходных сигналов ориентации подвижного объекта, а также обеспечения модуляции реперного излучения.
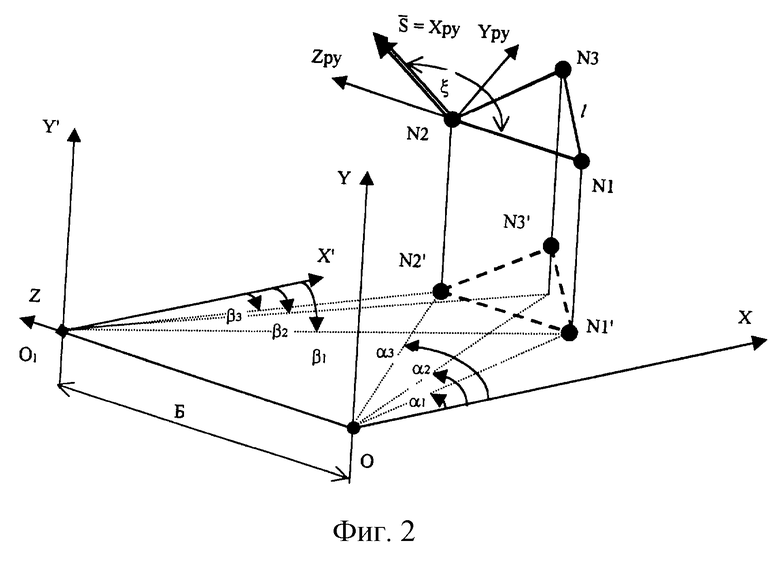
Геометрическая схема измерения ориентации подвижного объекта, когда реперные точки расположены в плоскости, к которой его вектор ориентации расположен под известным углом ξ, представлена на фиг.2. Приведенные ниже формульные зависимости определения углового положения вектора  иллюстрируют работоспособность геометрической схемы измерения, в которой реперные точки (РТ), не менее трех, располагаются в плоскости XpуOpуYpу, образуя равнобедренный треугольник с известной стороной l. Используются два оптико-локационных узла, измеряющих углы между направлениями на проекцию РТ на плоскость XOZ отсчетной системы координат и осью OZ. Точки отсчета углов-пеленгов О, O1 смещены друг относительно друга вдоль оси OZ на расстояние Б.
иллюстрируют работоспособность геометрической схемы измерения, в которой реперные точки (РТ), не менее трех, располагаются в плоскости XpуOpуYpу, образуя равнобедренный треугольник с известной стороной l. Используются два оптико-локационных узла, измеряющих углы между направлениями на проекцию РТ на плоскость XOZ отсчетной системы координат и осью OZ. Точки отсчета углов-пеленгов О, O1 смещены друг относительно друга вдоль оси OZ на расстояние Б.
Координаты проекций Ni реперных точек, где i=1,2,3, на плоскости XOZ
xi=zi•tgαi; xi=(Б-zi)•tgβi,
откуда
Уравнение плоскости Ax+Bу+Cz+D=0, в которой находятся реперные точки Ni, может быть записано через координаты точек Ni в отсчетной системе координат:
В этом случае, раскрывая определитель по первой строке, имеем:
т.е. 
где 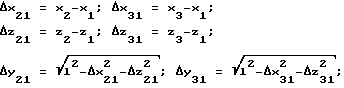
Так как вектор  перпендикулярен к плоскости размещения реперных точек (угол ξ= 90o), то его положение определено следующими углами в отсчетной системе координат:
перпендикулярен к плоскости размещения реперных точек (угол ξ= 90o), то его положение определено следующими углами в отсчетной системе координат:
Поставленная задача по созданию системы с новыми потребительскими параметрами решается за счет того, что в системе нашлемного целеуказания, содержащей размещенные на защитном шлеме летчика элементы реперных точек, формирующих данные ориентации защитного шлема, и оптический блок индикации с оптическим узлом вывода изображения индикации в поле зрения летчика, а также размещенные вне шлема средство оптической локации и блок формирования сигналов целеуказания, элементы реперных точек, не менее 3-х, размещены в единой конструктивной сборке с оптическим блоком индикации в плоскости, нормаль к которой ориентирована под известными углами к вектору ориентации шлема и оптическим осям оптического блока индикации, кроме того, фотоприемные узлы средства оптической локации размещаются в зоне, расположенной вблизи оси симметрии пространственной фигуры, сформированной зоной обзора оператора, например летчика, при изменении положения шлема в процессе функционирования системы, при этом блок формирования сигналов целеуказания дополнен блоком коррекции сигналов целеуказания, а система целеуказания дополнена блоком корректирующих поправок сигналов целеуказания.
Блок формирования сигналов целеуказания содержит последовательно соединенные блок коррекции сигналов целеуказания, выполненный как блок коррекции данных реперных точек, блок определения координат реперных источников и блок расчета сигналов целеуказания. При исполнении блока коррекции сигналов целеуказания как блока коррекции данных расчета сигналов целеуказания блок формирования сигналов целеуказания содержит последовательно соединенные блок определения координат реперных источников и блок расчета сигналов целеуказания.
Блок корректирующих поправок сигналов целеуказания содержит узел ввода поправок, узел хранения поправок.
Блок формирования сигналов целеуказания содержит генератор модуляции реперных источников оптического излучения частотой fN, а также фазоимпульсный селектор сигналов оптической локации.
Фотоприемные узлы средства оптической локации установлены с использованием оптической головки индикатора лобового стекла так, что зона локации совмещена с зоной расположения элементов реперных точек, а оси локации ориентированы относительно оптических осей оптической головки индикатора.
Фотоприемные узлы средства оптической локации размещены на оптической головке индикатора лобового стекла с помощью кронштейна, в котором посадочные места для крепления его блоков выполнены регулируемыми с обеспечением их разворотов до заданного совмещения зоны локации оптического средства с зоной расположения элементов реперных точек, при этом обеспечивается контроль расположения системы координат локации с оптическими осями оптической головки индикатора лобового стекла.
Оптический блок индикации с элементами реперных точек размещен на шлеме посредством кронштейна, который крепится к шлему, а посадочное место для установки оптического блока индикации выполнено регулируемым с возможностью его перемещений в направлениях, обеспечивающих совмещение зоны вывода индикации с полем зрения летчика.
Элементы реперных точек снабжены иммерсионными линзами, в фокальной поверхности которых установлены сами элементы.
Элементы реперных точек выполнены в виде точечных источников излучения, например ИК-диодов, а средство оптической локации выполнено в виде фотоприемного углоизмерительного блока.
Средство оптической локации содержит фазоимпульсный селектор сигналов локации и генератор модуляции реперных источников оптического излучения частотой fN,
Элементы реперных элементов выполнены в виде фотодетекторов, а средство оптической локации выполнено в виде блока сканирования световыми пучками пространства расположения реперных фотодетекторов.
Элементы реперных точек выбирают исходя из условия их модулирования одной частотой fN, причем фаза частоты модуляции каждого элемента реперных точек разнесена на величину выбираемую из условия: Δϕ=360o/N, где N - количество элементов реперных точек.
Изложенная сущность предлагаемого способа и устройства поясняется следующим описанием и чертежами, где изображены:
фиг.1 - блок-схема существующего устройства;
фиг. 2 - геометрическая схема измерения ориентации подвижного объекта с использованием трех реперных точек, размещаемых на лобной части защитного шлема;
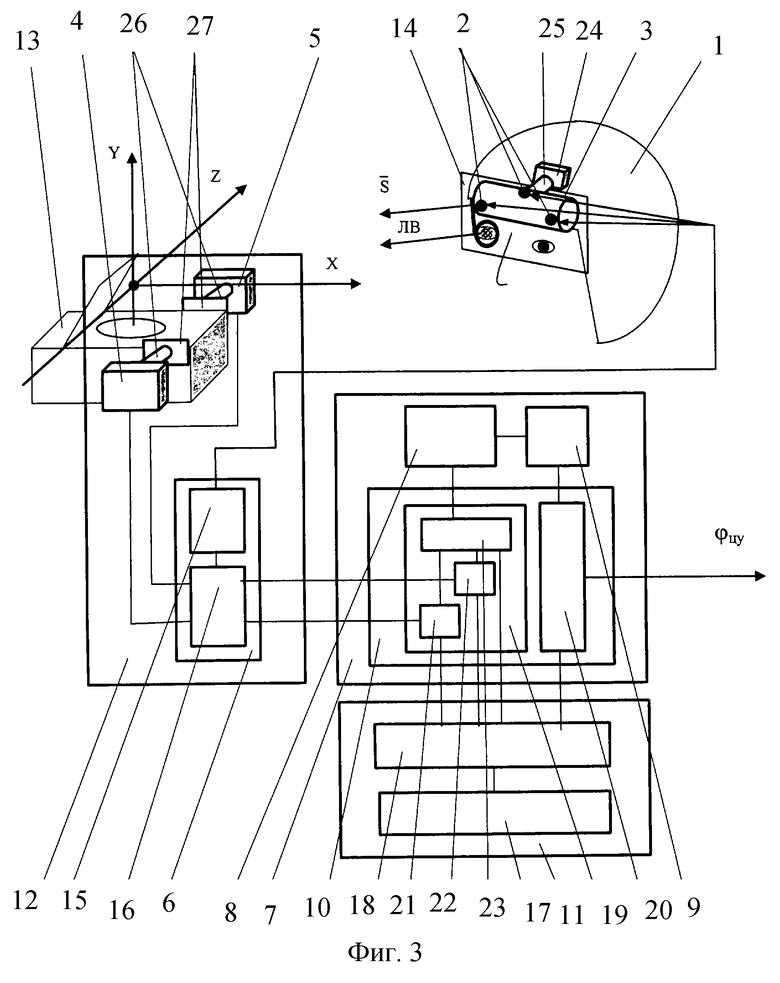
фиг.3 - блок-схема реализации устройства;
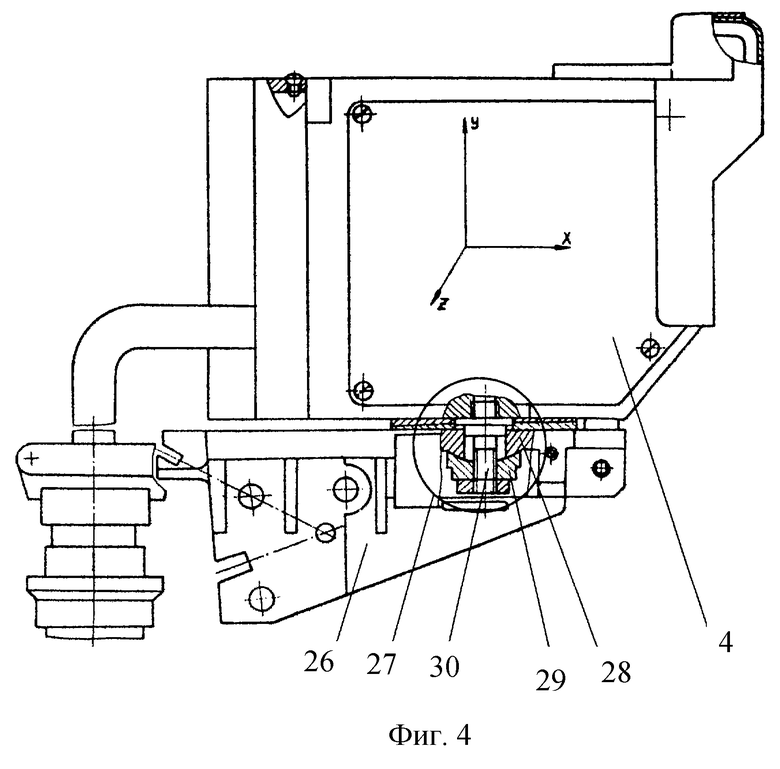
фиг. 4 - вариант выполнения кронштейна установки оптико-локационного блока;
фиг. 5 - возможная импульсная диаграмма модуляции и селекции реперных излучателей.
Блок-схема одного из вариантов построения предлагаемой системы целеуказания, которая представлена на фиг.3, содержит размещаемые на защитном шлеме 1 три реперные метки - реперные точки (РТ) 2, в качестве которых применены источники излучения, и оптический узел 3, размещаемые на борту самолета два оптико-электронные локационные узлы 4 и 5, блок формирования данных локации 6, блок формирования сигналов целеуказания 7, который содержит блок 8 определения координат реперных точек, блок 9 расчета сигналов целеуказания, блок коррекции 10 сигналов целеуказания, а также блок корректирующих поправок 11. Оптико-электронные локационные узлы 4 и 5 совместно с блоком формирования данных локации 6 являются составными частями средства оптической локации 12, причем оптико-электронные локационные узлы 4 и 5 (датчики средства оптической локации) размещаются на оптической головке индикатора 13 (индикатора лобового стекла - ИЛС), который является стандартным средством оборудования кабины многофункциональных самолетов. Размещаемые на защитном шлеме 1 реперные метки 2 и оптический блок сблокированы в единый нашлемный реперно-индикаторный узел 14.
Узел 6 формирования данных локации РТ содержит генератор модуляции 15 (блок синхронизации), фазоимпульсный селектор 16 сигналов оптической локации. Блок корректирующих поправок 11 содержит в своем составе узел ввода корректирующих поправок 17, узел хранения корректирующих поправок 18. Блок коррекции 10 сигналов целеуказания из состава блока формирования сигналов целеуказания 7 содержит в своем составе узел 19 коррекции данных расчета координат РТ и узел 20 коррекции данных расчета сигналов целеуказания. Узел 19 коррекции данных расчета координат РТ может быть выполнен с использованием сумматоров 21, 22 и узла 23 хранения данных коррекции данных (углов-пеленгов) для расчета координат РТ 2 (оперативное запоминающее устройство). Количество сумматоров устанавливается в зависимости от количества датчиков средства оптической локации и принятой схемы обработки информации. Блок коррекции 10 сигналов целеуказания может содержать только узел 19 коррекции данных расчета координат РТ либо только узел 20 коррекции данных расчета сигналов целеуказания.
Выходы оптико-локационных узлов 4 и 5 соединены через фазоимпульсный селектор 16 блока формирования данных локации РТ с входом узла коррекции 10 сигналов целеуказания из состава блока 7 формирования сигналов целеуказания. При этом выходы фазоимпульсного селектора 16 соединены в узле 19 коррекции данных расчета координат РТ с первыми входами сумматоров 21 и 22 соответственно, вторые входы которых соединены с выходом узла хранения корректирующих поправок 18, вход которого соединен с выходом узла ввода корректирующих поправок 17 блока корректирующих поправок 11. Выходы сумматоров 21 и 22, а также выход узла 18 хранения корректирующих поправок соединены через блок 23 хранения данных коррекции с входами узла расчетов координат реперных источников 8, выход которого через блок 9 расчета сигналов целеуказания (параметров ориентации подвижного объекта) соединен совместно с соответствующим выходом узла 18 хранения корректирующих поправок с входом узла 20 коррекции данных расчета координат целеуказания, выход которого является выходом системы. Генератор модуляции 15 соединен с реперными точками (излучателями) 2 и фазоимпульсным селектором 16.
В данной системе целеуказания предусмотрена коррекция сигналов целеуказания как за счет выполнения коррекции данных, поступающих от средства оптической локации при определении координат РТ (блок 19), так и выполнения коррекции рассчитанного сигнала целеуказания (блок 20). При построении системы с коррекцией сигналов целеуказания только по выходному сигналу в ней будет использован только блок 20.
Реперно-индикаторный блок 14 устанавливается на шлем 1 с помощью кронштейна 24, который крепится к защитному шлему, при этом посадочное место 25 для установки сборки выполняется регулируемым с обеспечением перемещений в направлениях, обеспечивающих совмещение зоны вывода индикации с полем зрения летчика.
Оптико-локационные узлы 4 и 5 устанавливаются на оптической головке индикатора 13 с помощью кронштейнов 26, на которых посадочные места 27 для крепления оптико-локационного блока выполняются регулируемыми с обеспечением разворотов узлов 4 и 5 до заданного совмещения направления осей системы координат оптико-локационного блока с направлением оптических осей визирной головки, ориентированных в свою очередь относительно системы координат самолета, в которой производится отсчет сигналов целеуказания.
В качестве реперных источников 2 могут быть использованы ИК-диоды, которые имеют большое быстродействие, что позволяет осуществлять модуляцию их излучения. Для расширения апертуры излучения ИК-диоды устанавливаются в фокальной поверхности иммерсионных линз.
Оптико-локационные узлы 4 и 5 могут быть выполнены как с использованием координатно-чувствительных фотоприемных узлов, так и на основе оптической схемы, формирующей узкое мгновенное поле зрения дискретного фотоприемника, которым сканируется пространство возможных положений реперных источников. Сканирование осуществляется за счет разворота зеркальной призмы.
Узел регулировки 27 кронштейна 26 установки оптико-локационных узлов 4 и 5 (фиг.4) может быть выполнен с использованием опорной переходной детали 28, опорная поверхность которой выполнена в виде полусферы, опирающейся на полусферическую выемку в опоре 29. Обе эти детали имеют сквозное отверстие, через которое проходит установочный штырь 30 корпуса оптико-локационного узла.
Генератор модуляции 15, блоки 7 формирования сигналов целеуказания и 11 корректирующих поправок могут быть выполнены с использованием стандартных средств электронной и вычислительной техники.
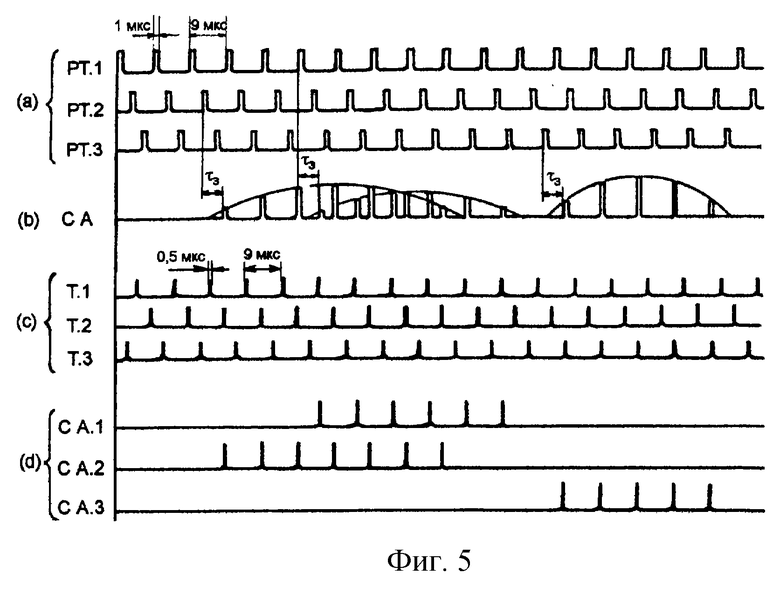
Импульсная диаграмма работы системы, построенной с использованием оптико-локационных узлов на основе сканирующих зеркальных призм, представлена на фиг.5. По сигналам генератора модуляции 15 импульсы одной длительности и скважности (τ= 1 мкс, Q=9), но сдвинутые друг относительно друга по фазе на одну треть периода, т.е. на τ=3 мкс, поступают на соответствующий реперный излучатель - импульсы РТ.1, РТ.2, РТ.3 из пакета (а). Оптико-локационные узлы 4 и 5 сканируют узким мгновенным полем зрения фотоприемника пространство расположения реперных излучателей 2. При совмещении поля зрения с реперным источником на выходе оптико-локационного узла 4 появляются импульсы. Результирующий сигнал СА состоит из пачек импульсов, соответствующих реперному излучению всех трех источников - пакет (b). Одновременно с импульсами запитки реперных излучателей, генератор модуляции 15 формирует соответствующие им импульсы тактирования Т.1, Т.2, Т.3 пакета (с), которые одновременно с импульсами с выхода оптико-локационного блока поступают на вход фазоимпульсного селектора 16, в котором используя принцип совпадения соответствующих импульсов, происходит разделение сигналов на три канала, т.е. формируются импульсы пакета (d), в которых положение центрального импульса относительно начала сканирования зоны расположения реперных источников соответствует углам-пеленгам на проекции реперных источников 2 на плоскость XOZ. Эти сигналы поступают на вход блока формирования сигналов целеуказания 7, где используются как исходные данные для расчета параметров ориентации подвижного объекта (сигналов целеуказания).
При установке оптико-локационных узлов 4 и 5 на борту летательного аппарата производят совмещение ориентирования их системы координат с системой координат летательного аппарата, в которой необходимо определять углы ориентации подвижного объекта (защитного шлема летчика). С целью упрощения операции юстировки системы для получения данных ориентации подвижного объекта с заданной точностью производят измерения несоответствия между установившимися (фактическими) параметрами систем координат и принятыми в схеме расчета (фиг.2):
- отличия (ΔБ) фактического расстояния между оптико-локационными узлами от принятого расстояния Б между точками отсчета углов-пеленгов (точки О и O1 на фиг.2);
- отличия Δ(α,β,θ) реальных углов разворота оптико-локационных узлов относительно осей измерительной системы координат от принятых значений углов в схеме расчета.
Посредством ряда пробных измерений ориентации подвижного объекта определяют погрешность определения параметров ориентации для конкретной установки системы.
Полученные данные вводят и хранят в блоке корректирующих поправок 11, откуда они поступают в блок формирования сигналов целеуказания 7 и используются для компенсации несоответствия параметров фактической схемы измерения и схемы, принятой для расчета. Для ввода данных используется узел ввода 17. Для хранения данных используется узел хранения 18, который может быть выполнен как в виде простейшего наборного табло с тумблерами на каждый разряд числа значения рассогласования, так и электронного запоминающего устройства с возможностью перезаписи, типа Флэш-память, сохраняющего данные и при отсутствии питания.
Данные коррекции углов-пеленгов поступают на второй вход сумматоров 21 и 22, где каждая поправка суммируется с соответствующим измеренным значением угла-пеленга на реперные точки 2. Данные коррекции расстояния между точками отсчета углов-пеленгов (расстояния между оптико-локационными узлами) поступают на вход узла 23 хранения данных коррекции, куда также поступает значение констант номинального расстояния между точками отсчета углов-пеленгов.
Откорректированные значения углов-пеленгов и расстояний между оптико-локационными узлами хранятся в узле хранения данных углов-пеленгов в оперативном запоминающем устройстве 23, откуда они поступают в узел расчета координат реперных излучателей 8. Далее рассчитанные значения координат реперных излучателей поступают в блок 9 расчета сигналов целеуказания, с выхода которого сигналы ориентации поступают на узел 20 коррекции данных расчета координат целеуказания из состава блока 10 коррекции сигналов целеуказания, в котором часть погрешности, не скомпенсированная за счет коррекции исходных данных (углов-пеленгов, расстояния между точками отсчета и т.п.), дополнительно компенсируется с помощью данных, полученных после ряда пробных измерений ориентации подвижного объекта. Эти данные поступают из блока корректирующих поправок 11. Откорректированные сигналы целеуказания (данные ориентации подвижного объекта) выдаются потребителю.
Т. о. предложенное техническое решение показывает возможность создания устройства определения ориентации подвижного объекта, в котором реперные источники сблокированы с оптическим индикатором и располагаются на лобной части защитного шлема, а оптико-локационный блок расположен впереди летчика.
По сравнению с прототипом предлагаемое устройство - нашлемная система целеуказания - обладает следующим преимуществом:
- встроенной системой коррекции как исходных параметров определения ориентации защитного шлема, так и самих сигналов целеуказания;
- малогабаритным нашлемным узлом, который может устанавливаться на стандартный современный защитный шлем летчика;
- установкой оптико-локационного блока на оптическую головку индикатора лобового стекла самолета (вертолета), что упрощает установку нашлемной системы целеуказания на летательный аппарат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2275651C2 |
| НАШЛЕМНАЯ СИСТЕМА ИНДИКАЦИИ | 1992 |
|
RU2091837C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ НАШЛЕМНОЙ СИСТЕМОЙ ЦЕЛЕУКАЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2266508C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
Изобретение относится к области специального оптического приборостроения, в частности к системам дистанционного определения ориентации подвижных объектов, и может быть использовано при создании систем робототехники, а именно устройств, определяющих положение рабочего органа манипуляторов, а также систем управления, где используются данные о разворотах головы оператора, систем визуализации тренажеров на основе нашлемного индикатора, систем виртуальной реальности и т.п. Технический результат - повышение точности и удобства при эксплуатации. Система целеуказания оператора содержит размещенные на шлеме оператора N реперных источников излучения, где N≥3, которые сблокированы в единый узел с оптическим блоком вывода индикации в поле зрения оператора, а также размещенные на базовом блоке летательного аппарата средство оптической локации, блок формирования сигналов целеуказания с блоком коррекции сигналов целеуказания, блок корректирующих поправок сигналов целеуказания. Фотоприемники средства оптической локации установлены в зоне, расположенной вблизи оси симметрии пространственной фигуры, соответствующей зоне обзора оператора, например летчика, при изменении положения шлема в процессе функционирования системы, с использованием оптической головки бортового индикатора лобового стекла. Установка датчиков средства оптической локации на оптической головке индикатора осуществляется с помощью кронштейна, в котором посадочные места для крепления датчика средства оптической локации выполняются регулируемыми с обеспечением его разворотов до заданного совмещения системы координат средства оптической локации с направлением оптических осей оптической головки. Установка оптического блока индикации с размещенными на нем реперными элементами на шлем выполняется с помощью кронштейна, причем посадочное место для установки оптического блока индикации выполняется регулируемым с обеспечением перемещений в направлениях, обеспечивающих совмещение зоны вывода индикации с полем зрения оператора. Система содержит генератор модуляции реперных источников излучения частотой fN, а также фазоимпульсный селектор. Реперные излучатели модулируются одной частотой, а фазы сигналов модуляции реперных излучателей разносятся на величину, определяемую в соответствии с выражением Δϕ = 360o/N, где N - количество реперных излучателей. 11 з.п.ф-лы, 5 ил.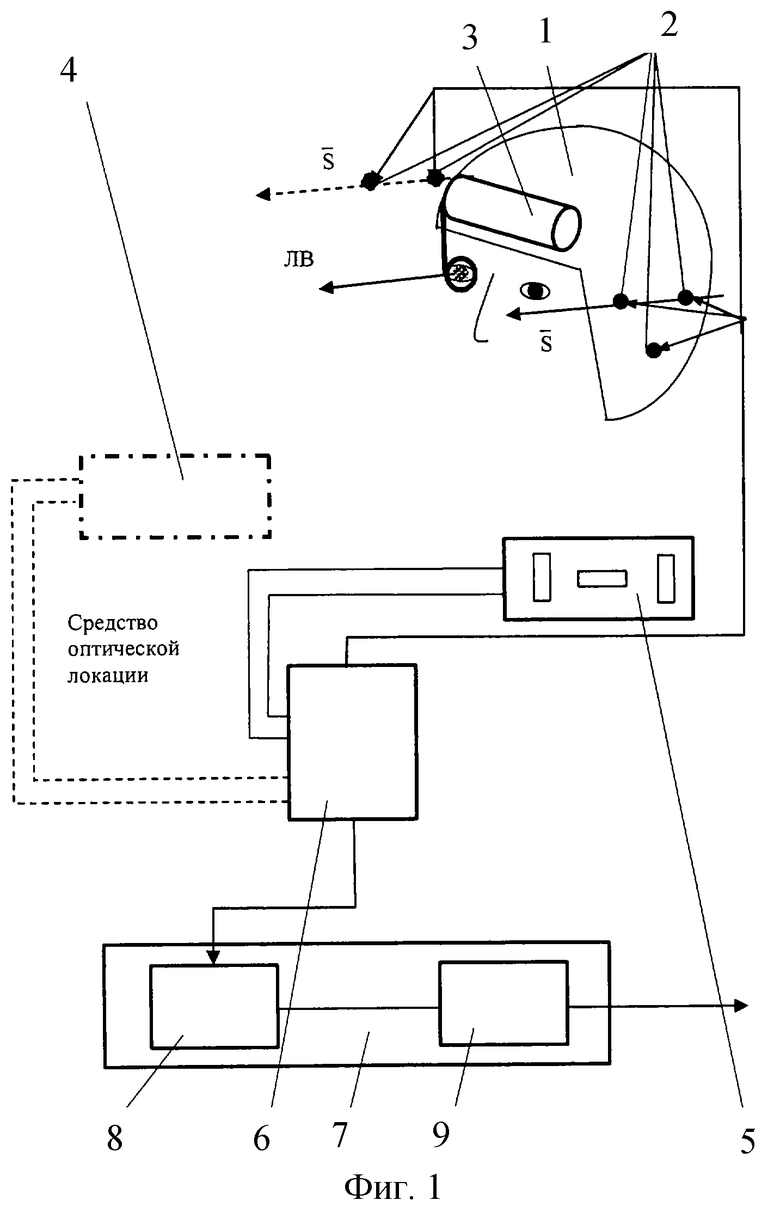
| GB 2002986 А, 28.02.1970 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВОЗДУХОПРОНИЦАЕМОСТИ ФИЛЬТРОВАЛЬНОЙ ТКАНИ | 0 |
|
SU294101A1 |
| УГЛОМЕР ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 0 |
|
SU260198A1 |
| СПОСОБ НАЛОЖЕНИЯ СУХОЖИЛЬНОГО ШВА ПРИ ПОВРЕЖДЕНИЯХ СУХОЖИЛИЙ СГИБАТЕЛЕЙ КИСТИ | 2002 |
|
RU2234877C2 |

