Изобретение относится к робототехнике, а именно к устройствам, определяющим положение рабочего органа манипуляторов с помощью устройств, отличающихся оптическими средствами измерений.
В основном системы определения ориентации объектов, характеризующиеся большим диапазоном определяемых углов разворота, допустимых линейных смещений и высокой точностью, строят по классической стереоскопической схеме, где измеряют направления на отдельные РТ с двух разнесенных на известное расстояние точек отсчета. Затем определяют координаты РТ и, зная расстояние между РТ, рассчитывают ориентацию объекта. При этом используют двумерные анализаторы плоских изображений, например, на основе матричных фотоприемников в сочетании с дальномерным устройством. (См. "Техническое зрение роботов", под общей редакцией д-ра т.н. Ю.Г.Якушенкова. М. Машиностроение, 1990 г. стр. 168.)
Погрешность измерения углов разворота объектов при стереоскопической (триангуляционной) схеме измерения определяется параметрами геометрической схемы измерения, т.е. зависит от величины расстояния между точками измерения углов направлений на РТ и величины расстояния между РТ. Оптимальное соотношение между расстоянием между точками отсчета углов (Б) и удалением (Х) до объекта для получения высокой точности составляет: Б 1,15 Х. Это соотношение обусловливает увеличение размеров (габаритов) измерительного оборудования на объекте и на неподвижной раме робота.
Известен способ ориентации подвижного объекта и устройство для его реализации.
Известен способ ориентации подвижного объекта, при котором: формируют на одном (неподвижном) объекте раме робота не менее 2 плоских узких веерных пучков излучения; разворачивая пучки излучения вокруг одной из осей системы координат неподвижного объекта, сканируют пучками излучения зону нахождения подвижного объекта с ДИ, расположенными вдоль одной из осей системы координат объекта; измеряют углы разворота плоских веерных пучков излучения в момент засветки ими ДИ; на основании измеренных углов разворота плоских пучков излучения определяют углы разворота объекта с размещенными ДИ относительно рамы робота, с размеренными источниками излучения.
Известно устройство для реализации способа ориентации подвижного объекта, содержащее размещенные на неподвижном объекте (раме робота) не менее двух источников излучения, формирующих веерные пучки излучения и установленных с возможностью сканирования этими пучками, а также детекторы излучения, размещенные на подвижном объекте, и блок определения угла наклона сканирующего излучения, соединенный с вычислителем.
Недостатком известных способа и устройства является большие габариты оборудования, размещаемого непосредственно на объекте.
Задачей является снижение нагрузки измерительного оборудования на подвижный объект за счет снижения необходимого количества источников сканирующего излучения.
Сущность предлагаемого технического решения заключается в новом наборе действий по формированию сканирующего излучения, его преобразованию с целью уменьшения необходимого количества источников излучения, уменьшения габаритов, массы измерительного оборудования, а значит, и его нагрузки на подвижный объект (манипулятор робота).
Поставленная задача решается за счет того, что в способе определения ориентации подвижного объекта относительно неподвижного объекта, при котором осуществляют сканирование пучком излучения, источник которого установлен на одном из объектов, измеряют угловое положение пучка излучения при засветке им детектором излучения, установленных на другом объекте, пучок сканирующего излучения формируют в виде полого конуса, ось которого ориентируют относительно вектора направления подвижного объекта, а сканирование осуществляют путем циклического изменения угла при вершине полого конуса.
Причем при засветке сканирующим излучением детекторов излучения измеряют углы засветки детекторов излучения, для формирования пучка сканирующего излучения может быть использован пучок световодов, сканирование обеспечивают за счет изменения угла засветки входного торца пучка световодов, а выходной торец пучка закрепляют на подвижном объекте соосно с его вектором направления.
При этом модулируют сканирующее излучение с частотой, превышающей частоту засветки детекторов излучения. Кроме того, задача решается за счет того, что в устройстве для определения ориентации подвижного объекта относительно неподвижного объекта, содержащем размещенные на одном из объектов N детекторов излучения, где N≥2, а на втором М источников сканирующего излучения, где М≥1, а также блок определения угла наклона сканирующего излучения, выход которого соединен с вычислителем, источники сканирующего излучения выполнены с возможностью формирования пучка излучения в виде полого конуса и изменения угла при вершине этого полого конуса, ось которого ориентирована относительно вектора направления подвижного объекта, а детекторы излучения установлены вдоль линий, ориентированных относительно осей координат неподвижного объекта, причем источник сканирующего излучения и выходы детекторов излучения соединены с блоком определения угла наклона сканирующего излучения.
Причем детекторы излучения могут быть выполнены координатно-чувствительными, а их выходы соединены через введенный блок определения углов засветки детекторов излучения с вычислителем.
Каждый из координатно-чувствительных детекторов излучения может содержать формирователь изображения и позиционно-чувствительный приемник излучения, выход которого является выходом детектора излучения.
При этом детекторы излучения могут быть выполнены точечными, на неподвижном объекте установлены N дополнительных источников сканирующего излучения, угловая апертура которых оптически сопряжена с угловым полем зрения соответствующих N детекторов излучения, а на неподвижном объекте установлен дополнительный детектор излучения, угловое поле зрения которого оптически сопряжено с угловой апертурой первого источника излучения, причем дополнительные источники сканирующего излучения и дополнительный детектор излучения соединены через введенный блок определения углов засветки детекторов излучения с вычислителем.
Каждый источник сканирующего излучения может содержать пучок световодов и блок формирования изменяемого угла засветки входного торца пучка световодов, причем выходной торец пучка световодов первого источника сканирующего излучения установлен на подвижном объекте так, что его оптическая ось ориентирована относительно вектора направления, а выходные торцы пучков световодов дополнительных источников сканирующего излучения установлены на неподвижном объекте.
Причем блок формирования изменяемого угла засветки входного торца пучка световодов может содержать узел формирования сходящегося пучка лучей с датчиком угла наклона, выход которого является выходом блока формирования изменяемого угла засветки, а пучки световодов могут быть выполнены с регулярной структурой, причем выходные торцы расположены в фокальной плоскости дополнительно введенных формирователей изображения.
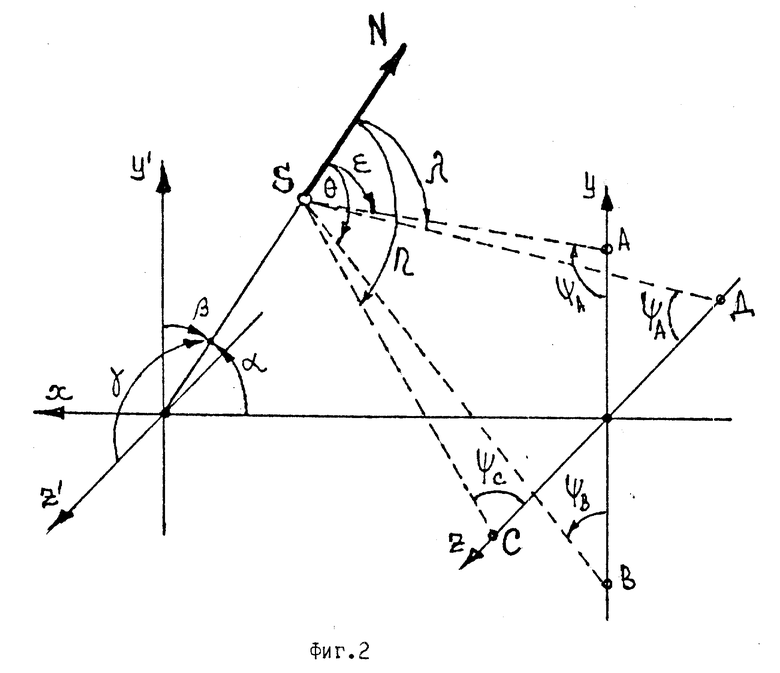
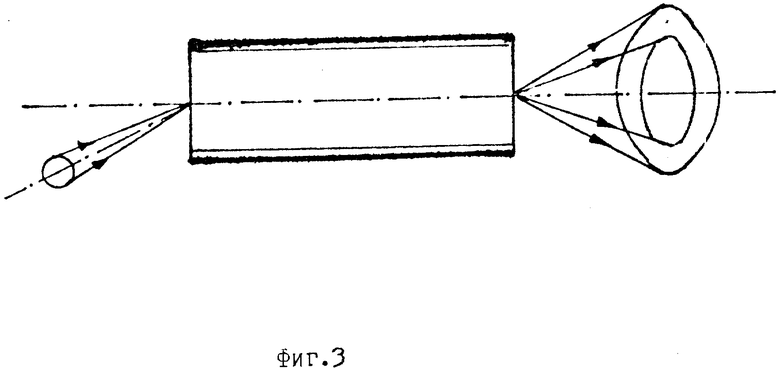
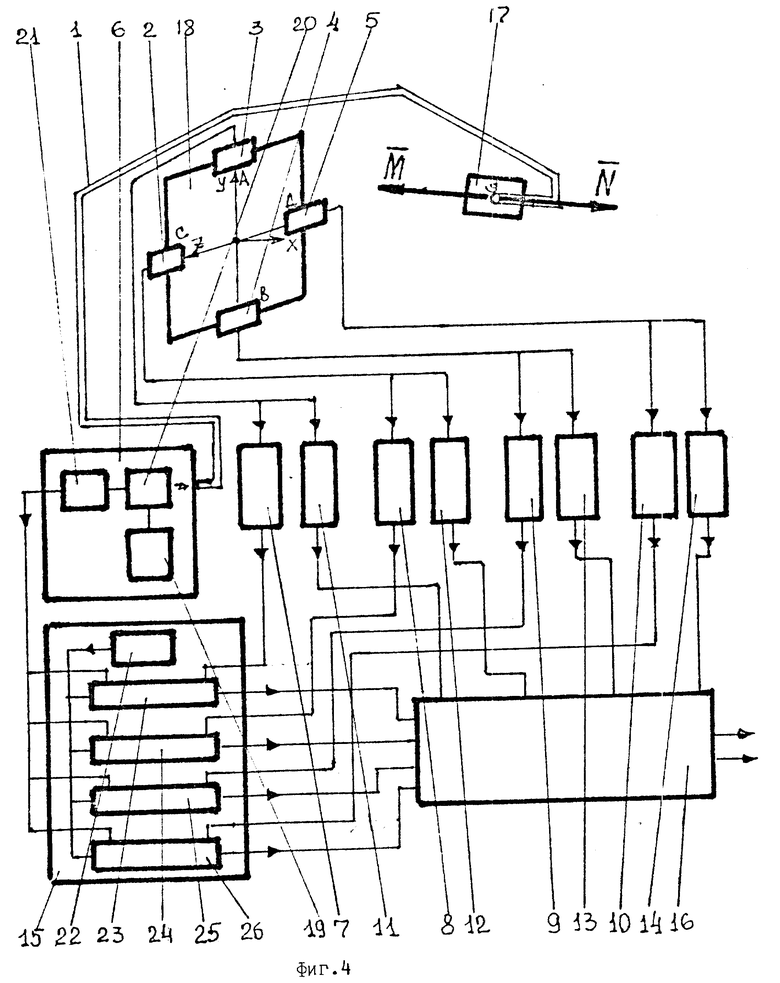
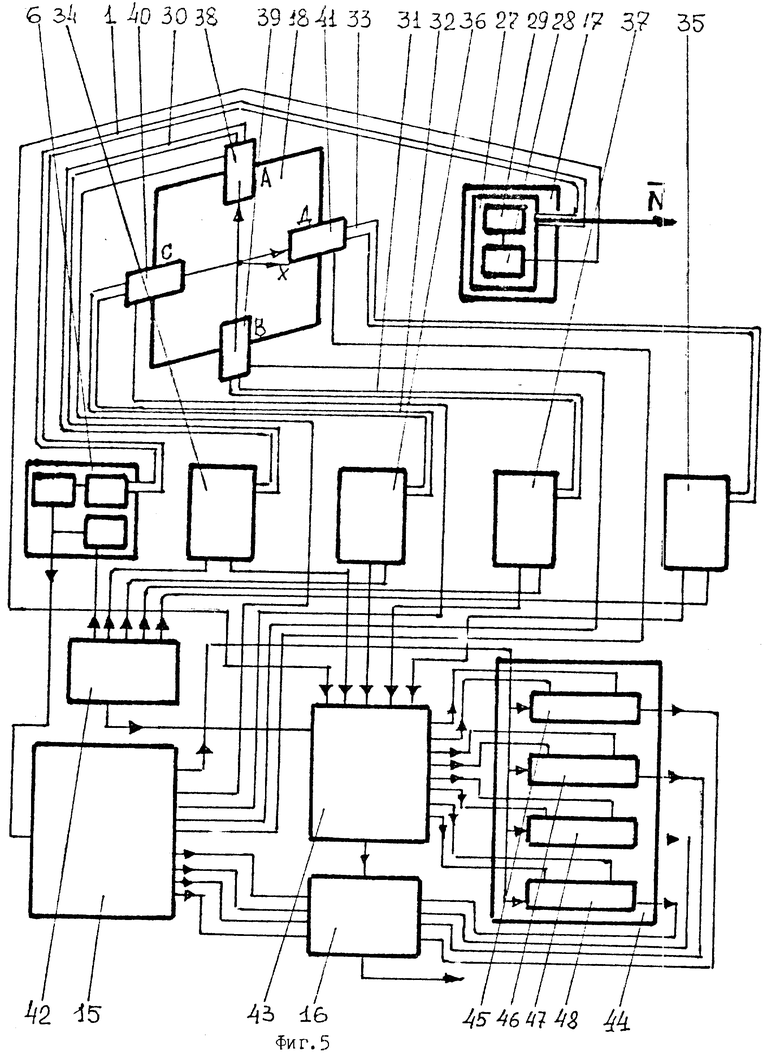
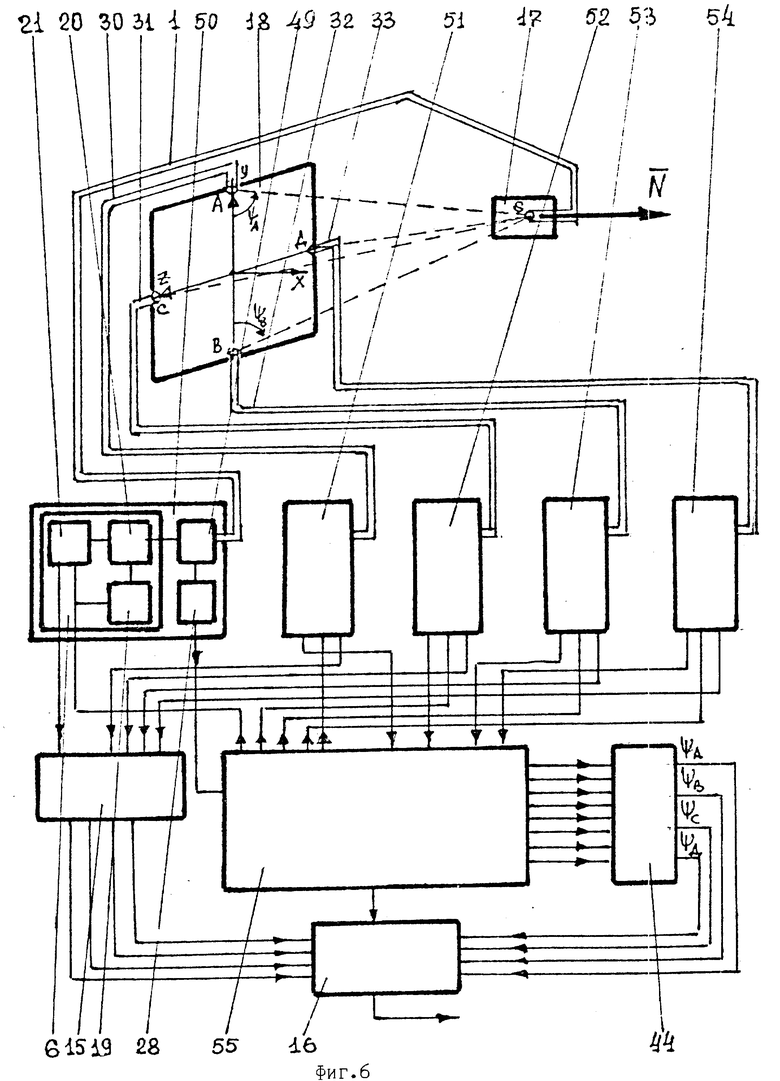
На фиг. 1 дана геометрическая схема определения углов разворота; на фиг. 2 геометрическая схема определения углов разворота при изменении углов засветки ДИ; на фиг. 3 схема симметрирования излучения, проходящего через жгут оптических волокон; на фиг. 4 блок-схема устройства определения ориентации объекта с измерением углов засветки ДИ; на фиг. 5 блок-схема устройства с совмещением полей зрения ДИ и диаграммы излучения источников излучения; на фиг. 6 блок-схема устройства с совмещением полей зрения ДИ с угловой апертурой входного торца жгута оптических волокон.
Геометрическая схема определения углов разворота объекта ориентации вектора N, который соответствует направлению ориентации подвижного объекта (фиг. 1), иллюстрирует возможность осуществления предлагаемого способа. Неподвижный объект представлен в виде системы координат XYZ, в начале которой (точка О) и на оси Z (точки С и Д) размещены реперные ДИ. В данной схеме начало вектора N (точка S) размещено в начале системы координат подвижного объекта, а вектор N коллинеарен оси ОХ его системы координат.
Из скалярного произведения векторов N и SC определяются направляющие косинусы
Упростив это выражение, получим:
xscosα+OCcosγ=SC•cosθ
тогда:
т.к. углы α,θ измеряются, а размеры SC, OC, OS известны, то направляющие косинусы cosγ и cosα определены.
Случай, когда объект обладает, кроме возможности разворота, еще и линейным смещением, иллюстрируется схемой измерения, проставленной на фиг. 2, где известны углы, под которыми засвечиваются ДИ. Реперные ДИ установлены в точках A, Y, C, D, на осях системы координат неподвижного объекта.
Направляющий косинус cos cosβ определяется из соотношения скалярных произведений векторов N, AS и N, BS:
упростив выражение и вычтя из первого выражения второе, получим:
из треугольника ABS
тогда: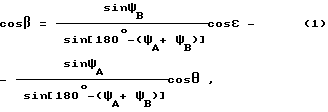
аналогично определяется направляющий косинус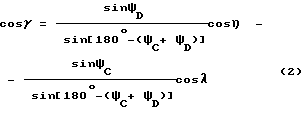
Устройство определения углов разворота может быть выполнено на основе пучка световодов, используемого как формирователь излучения в кольцевой конической зоне, как обладающего явлением "симметризации" подсвечивающего излучения.
Свойство "симметризации" снопа подсвечивающего излучения выражается в том, что сноп лучей, падающий под углом на входной торец световода с прямыми торцами, по выходе заполняет в пространстве зону, ограниченную двумя близкими коаксиальными поверхностями (см. книгу Саттаров Д.К. "Волоконная оптика", Л. Машиностроение, 1973 г. стр. 50).
Устройство определения углов разворота рабочего органа манипулятора, блок-схема которого представлена на фиг. 4, содержит гибкий жгут оптических волокон 1, реперные ДИ 2, 3, 4, 5, блок 6 формирования подсветки входного торца жгута 1, блоки 7, 8, 9, 10 формирования сигналов о засветке ДИ, блоки 11, 12, 13, 14 формирования углов засветки ДИ, блок 15 определения углового излучения при засветке ДИ и вычислитель 16.
Выходной торец жгута 1 размещается на рабочем органе 17 манипулятора, а ДИ 2, 3, 4, 5 размещаются на раме 18 робота, причем нормаль М к плоскости выходного торца жгута 1 противоположно направлена вектору N направления рабочего органа 17, а ДИ размещаются на линиях, параллельных осям X и Z системы координат XYZ робота (рамы 18).
Блок 6 формирования подсветки входного торца жгута содержит узел 19 формирования сходящегося пучка излучения, узел 20 изменения угла наклона излучения относительно плоскости входного торца жгута, узел 21 формирования сигнала о начале засветки входного торца жгута. Блок 15 определения углового положения сканирующего излучения содержит генератор 22 импульсов стабильной частоты и счетчики 23, 24, 25, 26.
Блок 6 формирования подсветки одним своим выходом соединен с входами блока 15 определения углового положения сканирующего излучения, а другим выходом оптически сопряжен с входным торцом жгута 1, выходной торец которого оптически сопряжен с каждым из ДИ блоков 7, 8, 9, 10 формирования сигнала засветки и блоков 11, 12, 13, 14 определения угла засветки, причем выходы блоков 7, 8, 9, 10 соединены с входами блока 15 определения углового положения излучения, а выходы блоков 11, 12, 13, 14 соединены с входами вычислителя 16, на вторые входы которого подсоединены выходы блока 15.
Узел 19 формирования сходящегося пучка излучения может быть выполнен на основе источника излучения, например, ИК излучающего диода и объектива, сопрягающего его с входным торцом жгута. Узел 20 изменения угла наклона излучения может быть выполнен на основе вращающегося зеркала, привод вращения которого соединен с узлом 21 формирования сигнала о начальном угле положения излучения, выполненного на основе темного диска с прорезью, устанавливаемого между оптопарой: источник излучения фотоприемник. При развороте зеркала в положение, соответствующее начальному углу сканирования, прорезь диска устанавливается между источником и фотоприемником оптопары, т.е. происходит засветка фотоприемника. Реперные детекторы излучения ДИ выполняются на основе формирователя изображения (объектива) и координатно-чувствительного фотоприемника, например, матрица фотодиодов (фото ПЗС).
В начальный момент работы устройства узел 20 изменения угла наклона ориентирует излучение, сформированное узлом 19 коллинеарно оси входного торца жгута 1. При увеличении угла наклона излучения узел 21 формирует сигнал о начале сканирования, который поступает на входы блока 15 определения углов, где открываются счетчики 23, 24, 25, 26 для счета импульсов стабильной частоты, поступающих с генератора 22. С выходного торца жгута (точка S) выходит излучение, заключенное между двумя коническими поверхностями. При дальнейшем увеличении угла при вершине конических поверхностей происходит засветка ДИ 2, 3, 4, 5. Сигналы с ДИ поступают на входы блоков 7, 8, 9, 10 формирования сигнала засветки и блоков 11, 12, 13, 14 определения угла засветки ДИ. Сигнал с выхода блоков 7, 8, 9, 10, соответствующий совмещению сканирующего излучения и ДИ, поступает на входы блока 15 и останавливает соответствующие счетчики 23, 24, 25, 26. В этом случае число импульсов n, зафиксированных счетчиками, соответствует углу положения сканирующего излучения, так, в случае засветки ДИ 4 угол θ=ωn•τ , где τ - период импульсов, омега скорость изменения положения сканирующего излучения. Сигналы с выходом блока 15, соответствующие углам положения сканирующего излучения (число импульсов с счетчиков 23, 24, 25, 26) поступает на входы вычислителя 26.
В блоках 11, 12, 13, 14 на основании сигналов о засветке ДИ формируются сигналы о величине угла, под которым поступает сканирующее излучение на ДИ. Сигнал о засветке ДИ в случае использования матрицы фото ПЗС представляют собой число импульсов, равное числу (координаты) засвеченных ячеек матрицы. На основании этих сигналов с учетом принятой формы засветки и известного фокусного расстояния формирователя изображения, в блоках 11, 12, 13, 14 определяются сигналы, соответствующие углу засветки каждого ДИ, которые и поступают в вычислитель 16. На основании полученных сигналов о углах ε,θ,η,λ при вершине конуса сканирующего излучения и углах jA, ψB, ψC, ψD, под которыми происходит засветка ДИ, в вычислителе 16 по формулам (1) и (2) определяются направляющие косинусы вектора N, т.е. определяется ориентация рабочего органа манипулятора.
Определение углов, под которыми производится засветка ДИ (углов ψA, ψB, ψC, ψD, ) может быть проведено с использованием дискретных (точечных) ДИ при установке одного из них на подвижном объекте (манипуляторе) и дополнительных источников сканирующего излучения на неподвижном блоке.
Пример исполнения устройства определения ориентации манипулятора опредставлен на блок-схеме на фиг. 5.
На рабочем органе манипулятора 17 размещается источник сканирующего излучения (выходной торец жгута 1 оптических волокон) и блок 27 регистрации засветки выходного торца жгута 1, содержащий точечный ДИ 28 и узел 29 совмещения поля зрения ДИ 28 с вершиной конуса сканирующего излучения (апертурой выходного торца жгута 1). Дополнительные источники сканирующего излучения, размещаемые на раме 18 робота, идентичны источнику сканирующего излучения, размещаемому на рабочем органе 17 манипулятора и выполняются на основе гибких жгутов оптических волокон 30, 31, 32, 33 и соответствующих им блоков 34, 35, 36, 37 формирования подсветки входных торцов жгутов, выполненных идентично блоку 6, а также блоков 38, 39, 40, 41 (идентичных блоку 27) регистрации засветки выходного торца жгутов 30, 31, 32, 33.
В состав устройства введен блок 42 тактирования работы источников сканирующих излучений, блок 43 управления определением углов направлений между источниками сканирующих излучений, блок 44 определения углов направлений между сканирующими излучениями, который содержит счетчики 45, 46, 47, 48.
Блок 42 тактирования соединен своими выходами с входами блоков 6, 34, 35, 36, 37 формирования подсветки входных торцов жгутов и входом блока 43 управления, другие входы которого соединены с выходами (сигналы засветки ДИ) блоков 34, 35, 36, 37. Выходы блока 43 соединены с входами блока 44 определения углов направлений между источниками сканирующего излучения, к входу которого подсоединен также выход блока 15 (выход импульсов стабильной частоты), выходы блока 44 соединены с входами вычислителя 16, на другие входы которого подсоединены выходы блока 15 определения углов положений сканирующего излучения жгута 1, а также подсоединен выход блока 43.
В первом такте работы устройства блок 42 тактирования выдает сигнал на начало работы блока 6 формирования подсветки жгута 1, например, включение узла 19 формирования сигнала начала сканирования. При начале подсветки жгута сигнал с узла 21 запускает счетчики блока 15, а сканирующее излучение с выходного торца жгута 1 через блок 27 (узел 29 совмещения поля зрения ДИ и апертуры источника) засвечивает точечные ДИ блоков 38, 39, 40, 41, сигналы с которых останавливают счетчики блока 15 и на его выходах устанавливаются сигналы, соответствующие углам ε,θ,η,λ
В следующем такте работы блок 42 выдает сигнал на начало работы блока 34 формирования подсветки жгута 30. При начале подсветки жгута 30 сигнал с узла 34 через блок 43 управления запускает счетчик 45, который начинает счет импульсов стабильной частоты. При засветке ДИ блока 27 сигнал с его выхода поступает на блок 43 управления, где формируется сигнал на остановку счета счетчика 45, на выходе которого устанавливается сигнал число импульсов - соответствующий углу jA/
В последующих тактах работы устройства определяются углы ψB, ψC, ψD, в виде сигналов счетчиков 46, 47, 48 аналогично описанному выше алгоритму определения угла ψA После чего в вычислителе 16 на основании определенных углов рассчитывается ориентация рабочего органа манипулятора.
Сопряжение полей зрения точечных ДИ с угловыми апертурами входных торцов соответствующих жгутов позволяет построить устройство определения ориентации объектов, размещая на рабочем органе манипулятора и раме робота только выходные торцы жгутов оптических волокон за счет установки ДИ с полем зрения, сопряженным с апертурой входного торца.
Пример исполнения устройства определения ориентации манипулятора представлен на фиг. 6.
На рабочем органе манипулятора 17 размещается источник сканирующего излучения выходной торец жгута 1 оптических волокон, входной торец которого оптически совмещается с блоком 6 формирования подсветки с помощью блока 49 оптического совмещения, который также совмещает его с полем зрения ДИ 28 (совмещается поле зрения ДИ с угловой апертурой жгута). Блоки 6, 28 и 49 объединены в сборку 50. Такие идентичные сборки 51, 52, 53, 54 сопряжены с входными торцами жгутов 30, 31, 32, 33, выходные торцы которых размещены на раме 18 робота ориентировано его системы координат. Устройство содержит также блок 15 определения углов положения сканирующего излучения, формируемого на манипуляторе 17 при совпадении с реперными точками на раме 18 (входными торцами жгутов), блок 44 определения углов направлений с реперных точек рамы на источник излучения манипулятора, блок 55 тактирования и управления (объединение блоков 42 тактирования и 42 управления), вычислитель 16.
В первом такте работы блок 55 выдает сигнал на начало работы блока 6 сборки 50 на формировании подсветки жгута 1. При начале подсветки жгута сигнал с узла 21 запускает счетчики блока 15 на подсчет импульсов стабильной частоты, а сканирующее излучение с выходного торца жгута 1 засвечивает входные торцы жгутов 30, 31, 32, 33 и излучение, проходя по жгутам, засвечивает ДИ в соответствующих сборках 51, 52, 53, 54. Сигналы с выходов ДИ останавливают соответствующие счетчики в блоке 15, в которых фиксируется число импульсов, соответствующее величинам углов положения сканирующего излучения в момент засветки входных торцов жгутов, установленных на раме 18.
В следующем такте работы блок 55 формирует сигнал на начало работы блока 6 сборки 51 формирования подсветки жгута 30. При начале подсветки жгута сигнал с узла 21 сборки 51 через блок 55 запускает соответствующий счетчик блока 44 определения углов. При засветке выходного торца жгута 1 засвечивается также и ДИ 28 в сборке 50, сигнал с которого поступает на вход блока 55, где формируется сигнал на остановку запущенного счетчика, на выходе которого устанавливается сигнал число импульсов соответствующий углу ψA
В последующих тактах работы устройства определяются углы ψB, ψC, ψD, в виде сигналов на соответствующих счетчиках блока 44 аналогично выше приведенному алгоритму определения угла ψA После чего в вычислителе 16 на основании определенных углов рассчитывается ориентация рабочего органа манипулятора.
С целью повышения помехоустойчивости работы устройства его можно дополнить блоком модуляции излучения, при этом снижается вероятность ложного определения засветки ДИ при внешних засветках устройства. Значение частоты модуляции выбирается более высокой, чем частота засветки ДИ, обусловливаемая скоростью сканирования излучением.
С целью расширения угловой зоны сканирования конусным излучением могут быть применены дополнительные оптические устройства, например, иммерсионные линзы, устанавливаемые перед выходным торцом оптического жгута.
Т. о. предложенные способ и устройство позволяют уменьшить размеры измерительного оборудования, размещаемого на подвижном объекте (только торец жгута оптических волокон), что позволяет уменьшить нагрузку на манипулятор робота и расширить область применения данного технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2275651C2 |
| НАШЛЕМНАЯ СИСТЕМА ИНДИКАЦИИ | 1992 |
|
RU2091837C1 |
| УСТРОЙСТВО БЕСТЕНЕВЫХ ОСВЕЩЕНИЙ | 2008 |
|
RU2370700C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ОСВЕТИТЕЛЬ | 2002 |
|
RU2244871C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2124747C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
Использование: для определения положения рабочего органа манипулятора. Сущность изобретения: при определении ориентации подвижного объекта относительно неподвижного осуществляют сканирование пучком излучения, сформированным в виде полого конуса, ось которого ориентирована относительно вектора направления подвижного объекта, на котором установлен источник этого излучения, измеряют угол при вершине полого конуса при засветке им детекторов излучения, установленных на неподвижном объекте, и по измеренным углам определяют ориентацию подвижного объекта. Кроме того, для формирования пучка сканирующего излучения может быть использован пучок световодов, сканирование обеспечивают за счет изменения угла засветки входного торца пучка световодов, а выходной торец пучка закрепляют на подвижном объекте. Сканирующее излучение целесообразно модулировать с частотой, превышающей частоту засветки детекторов излучения. При этом устройство для определения ориентации содержит размещенные на неподвижном объекте детекторы излучения, а на подвижном - по крайней мере один источник сканирующего излучения, выполненный с возможностью формирования пучка излучения в виде полого конуса и изменения угла при вершине этого полого конуса, ось которого ориентирована относительно вектора направления подвижного объекта, а детекторы излучения установлены вдоль линий, ориентированных относительно осей координат неподвижного объекта, причем источник сканирующего излучения и выходы детекторов излучения соединены с блоком определения угла наклона сканирующего излучения. 2 с. и 9 з.п. ф-лы, 6 ил.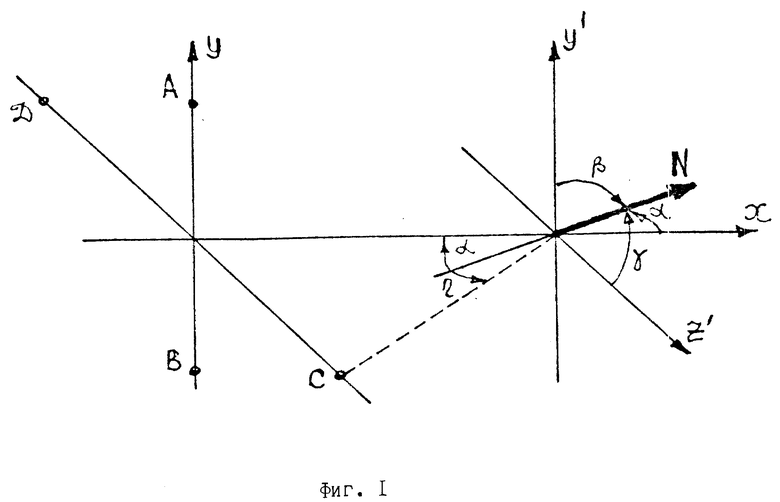
| Патент США N 3375375, кл | |||
| Катодное реле | 1921 |
|
SU250A1 |

