Изобретение относится к области специального оптического приборостроения и, в частности, к системам дистанционного определения ориентации подвижных объектов и может быть использовано при создании систем робототехники, а именно устройств, определяющих положение рабочего органа манипуляторов, а также систем управления, где используются данные о разворотах головы оператора, и т.п.
В настоящее время широко применяются для наведения различных управляемых подсистем, переключения органов управления без использования рук, за счет использования данных о разворотах головы оператора так называемые нашлемные системы целеуказания. Эти системы базируются на устройствах дистанционного определения ориентации подвижных объектов
Оптические устройства дистанционного определения ориентации подвижных объектов содержат размещаемые на подвижном объекте реперные источники излучения (РИ) и оптико-локационные блоки (ОЛБ), размещаемые на базовом (неподвижном) основании, относительно которого производится определение ориентации подвижного объекта. Оптико-локационные блоки определяют направления на отдельные РИ (углы-пеленги РИ), используя которые определяют ориентацию подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством. См. "Техническое зрение роботов" под общей редакцией д-ра т.н. Ю.Г.Якушенкова. М.: Машиностроение, 1990 г., стр.168. В классической стереоскопической схеме построения устройств определения ориентации подвижных объектов измеряют углы-пеленги РИ с двух точек, разнесенных на известное расстояние, затем определяют координаты РИ и ориентацию подвижного объекта.
Известны устройства локации источников излучения, размещаемых на подвижных объектах, например патенты США №4193689, №4209254; Великобритании №2002968, №1520154. Эти устройства содержат размещенные на подвижном объекте РИ, а на неподвижном объекте - М фотоприемных оптико-локационных блоков, где M≥2, определяющих углы-пеленги реперных источников, и блоки определения координат реперных источников излучения и ориентации подвижного объекта.
В указанных устройствах реализуется следующий способ определения координат РИ:
- определяют сигналы, соответствующие положению изображения РИ в плоскости фотодетектора;
- по полученным сигналам с учетом фокусного расстояния оптической схемы формирователя изображения РИ определяют углы-пеленги каждого РИ подвижного объекта;
- на основании данных углов-пеленгов с учетом известного расстояния между точками определения углов-пеленгов определяют координаты РИ.
Данный способ, а также устройство для его реализации описаны в патенте Великобритании №2002986, в котором предусматривается использование цилиндрического объектива-анаморфота для формирования изображения РИ в плоскости линейки фотодетекторов. Определив координату изображения РИ и зная фокусное расстояние цилиндрического объектива, определяют угол-пеленг РИ. Используя полученные данные и зная расстояние между формирователями изображения (точками, относительно которых производятся отсчеты углов-пеленгов), определяют координаты РИ.
Измерение ориентации подвижного объекта производится в три этапа: определение углов-пеленгов, координат РИ (точек M1 и М2), а затем, используя полученные значения координат РИ, определение ориентации подвижного объекта.
При проведении локации РИ определяются координаты изображения РИ на фотодетекторе 10, это ZBM1 и ZBM2. Используя полученные значения, а также фокусное расстояние f объектива 6, определяются углы пеленги РИ М1 и М2.
где i=1, 2.
Аналогично определяются углы αi в оптико-локационном блоке 4.
Определение координат точек M1 и M2 производится с использованием следующих функциональных зависимостей:

Точность определения координат РИ M1 и М2 определяется точностью отсчета углов-пеленгов αi, βi, a также точностью определения базового расстояния Бi между оптико-локационными блоками, т.е. между точками отсчета углов-пеленгов в каждом оптико-локационном блоке. Это расстояние можно записать в следующем виде

где: Б0 - номинальное значение базового расстояния при углах α0 и β0;
ΔБαi и ΔБβi - переменная часть базового расстояния в блоках А и В.
Погрешность определения координат РИ определяется точностью отсчета углов-пеленгов относительно предварительно установленной точки отсчета и точностью соответствия координат точки отсчета, принятых в измерительной схеме, координатам реальной точки отсчета. В оптико-локационных блоках лучевой поток РИ взаимодействует с оптическими компонентами измерительной схемы и дополнительно смещается (изменяются параметры ориентации его направления) относительно первоначально принятой точки отсчета. Так, при использовании зеркальных сканирующих элементов для расширения поля зрения фотодетекторов происходит смещение точки отражения лучей (точки отсчета углов-пеленгов) при разворотах зеркальных подвижных компонентов. Такие смещения луча приводят к изменению координат предварительно принятой точки отсчета его угловой ориентации, которое в реальных схемах измерений достигает несколько миллиметров. Т.к. удаление РИ от оптико-локационого блока в устройствах робототехники, в нашлемных системах целеуказания составляет 0,5...1,5 м, то это приводит к дополнительной погрешности отсчета углов-пеленгов в несколько угловых минут, что в свою очередь приводит к дополнительной погрешности порядка углового градуса в определении углов ориентации подвижного объекта. Во многих системах такая погрешность определения координат РИ неприемлема.
Недостатком известных способа и устройства определения координат РИ является отсутствие оперативного отслеживания за изменениями параметров реальной геометрической схемы отсчета углов-пеленгов (смещение точки отсчета углов-пеленгов), а также отсутствие автоматической коррекции выявленных изменений, что ограничивает точность определения углов-пеленгов.
Способ и устройство, принимаемые за прототип, реализованы в устройстве по патенту Великобритании GB 2002986. В устройстве определяются углы-пеленги РИ по измеренным координатам изображения РИ на фотодетекторах. При этом не учитывается смещение потока излучения от РИ при прохождении вспомогательных оптических компонентов (светофильтра, защитного стекла фотодетектора).
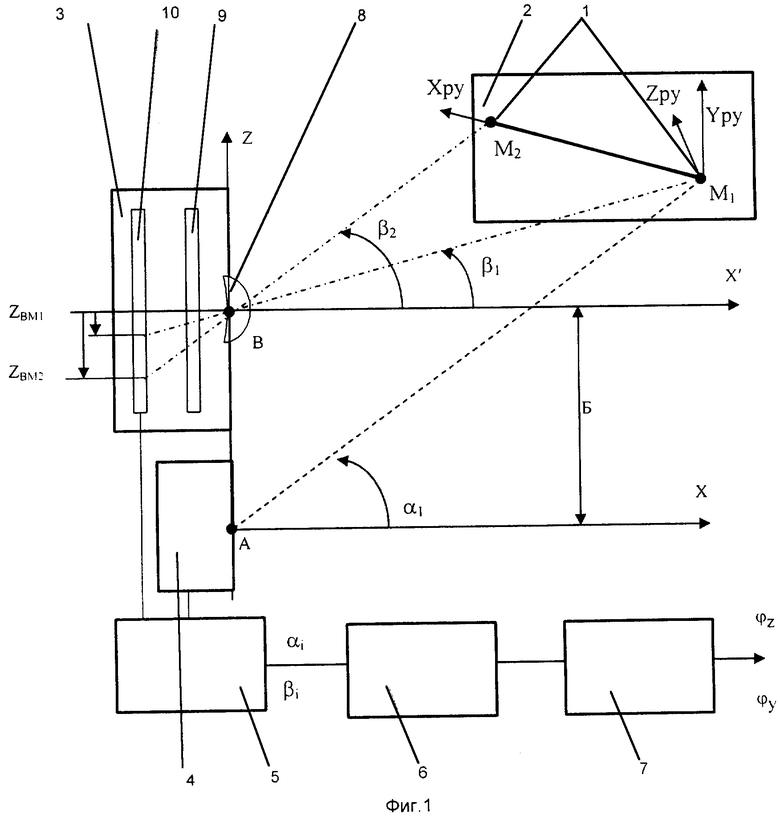
В качестве примера рассмотрим устройство определения координат РИ, представленное на Фиг.1, которое выполнено в соответствии с геометрической схемой отсчета, принятой в прототипе.
Устройство (Фиг.1) содержит РИ 1 (точечные излучатели M1 и M2), размещенные на подвижном объекте 2, ОЛБ 3 и 4, а также последовательно соединенные блок определения углов-пеленгов 5, блок 6 определения координат реперных излучателей, блок 7 определения ориентации подвижного объекта. ОЛБ содержит последовательно расположенные формирователь изображения РИ - цилиндрический объектив 8, светофильтр 9 и позиционно-чувствительный фотодетектор 10. Выход каждого ОЛБ подсоединен к входу блока 5.
Реперные излучатели M1 и М2 размещены на подвижном объекте вдоль вектора Хру направления его ориентации. На неподвижном блоке устанавливаются вдоль оси OZ (точки А и В) два оптико-локационных блока, измеряющих углы-пеленги проекций реперных излучателей на плоскость XOZ.
Измерение ориентации подвижного объекта производится в три этапа: определение углов-пеленгов, координат РИ (точек М1 и М2), а затем, используя полученные значения координат РИ, определение ориентации подвижного объекта.
Оптико-электронные блоки кроме объективов и фотодетекторов могут иметь в своем составе сканирующие зеркала, которые в процессе измерения углов-пеленгов также могут привести к дополнительному смещению точки отсчета углов-пеленгов.
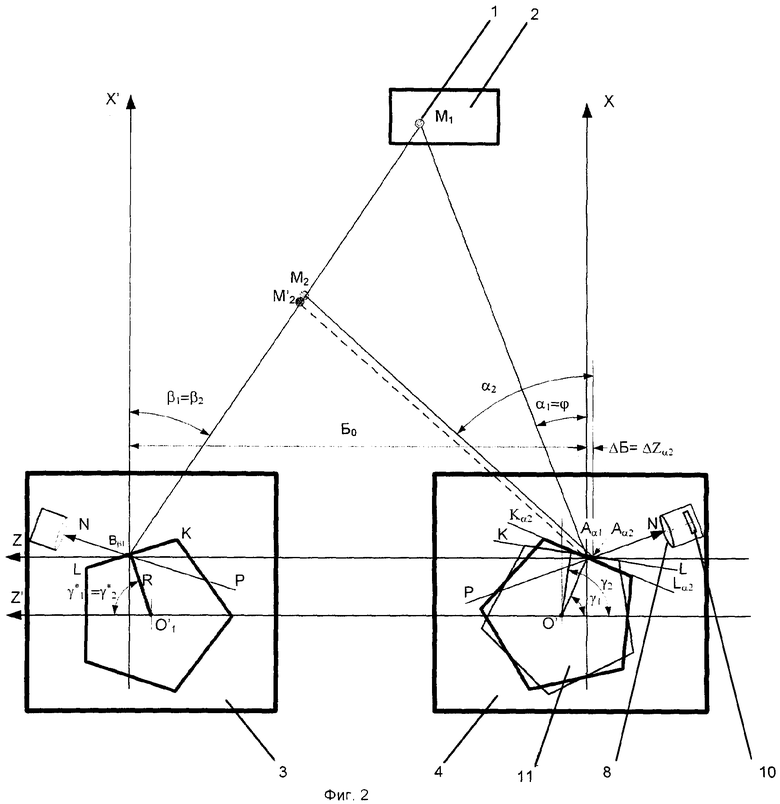
Для оценки изменения координат точек отсчета углов-пеленгов, а значит, и расчетного базового расстояния в сканирующих системах с вращающимися зеркальными призмами проведем анализ оптической схемы сканирующей системы, которая предназначена для определения координат проекций точек Мi на плоскость XAZ измерительной системы координат, обозначенной на Фиг.2.
Измерительная схема включает два сканирующих ОЛБ 3 и 4, каждый из которых содержит зеркальную призму 11 с радиусом вписанной окружности R, гранью KL и объектив 8 с фотодетектором 10, оптическая ось которого обозначена прямой PN. Центр зоны сканирования каждого ОЛБ задается прямой, положение которой может быть определено условием пересечения радиуса призмы R и прямой PN под углом ξ=45°. Сканирующие ОЛБ расположены в пеленгационной системе координат XOZ так, чтобы обеспечивалось наличие совместной зоны сканирования обоих ОЛБ в области наиболее вероятного положения РИ (Mi).
Излучение от РИ отражается от зеркальной грани KL сканирующей призмы 11 и по направлению прямой PN попадает на фотодетектор 10. При развороте призмы 11 поле зрения фотодетектора 10 сканирует (просматривает) зону возможного положения РИ. Угол разворота сканирующей призмы 11 соответствует удвоенному углу разворота поля зрения фотодетектора 10 в выбранной системе координат. Отсчет угла производится относительно начального угла разворота призмы 11 (угол φ), когда поле зрения фотодетектора 10 ориентировано относительно зоны возможных положений РИ, например находится на его границе (либо в центре зоны). Тогда угол-пеленг РИ будет равен α=φ-2γ. Точка, относительно которой производится измерение углов-пеленгов, может быть установлена как точка пересечения прямых PN и KL (например, точка А) при развороте призмы на угол φ. Тогда базовое расстояние для определения координат РИ - расстояние между двумя точками отсчета углов, прямая АВ, которая параллельна оси OZ системы координат расположения осей вращения зеркального элемента (сканирующей призмы).
Происходящие в процессе сканирования (при разворотах призмы относительно объектива) смещения точек отсчета углов-пеленгов (Аα0, Аα1, Аα2, Вα0, Bα1, Вα2) приводят к изменению размера и углового положения отрезка АВ, что в свою очередь проводит к погрешности определения координат РИ, а далее и подвижного объекта.
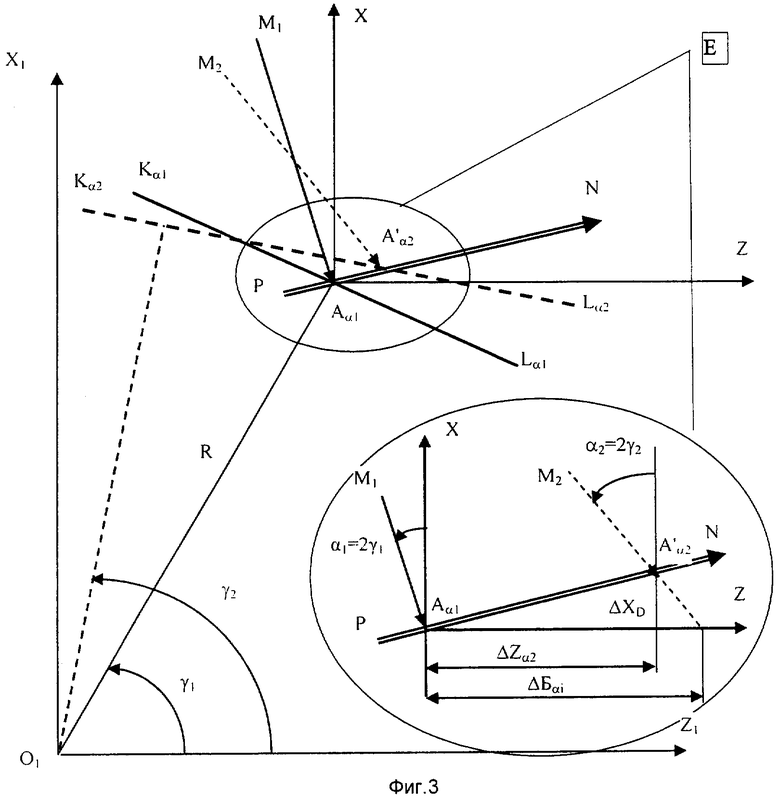
Рассмотрим изменения параметров отрезка Aα1, Aα2, проводя анализ изменения координат точки Аαi, при измерении углов-пеленгов α1, α2, при разворотах призмы относительно объектива в сканирующем ОЛБ 4 (Фиг.3). Процесс изменения координат точки отсчета в ОЛБ 3 аналогичен.
Уравнения прямых KL, PN могут быть записаны в следующем виде:
Решив совместно уравнения относительно координат ZA, ХA точки D, получим выражение для координат точки А:

В соответствии с полученным выражением видно (Фиг.3), что при развороте призмы 11 на угол γ2 происходит смещение точки отсчета угла-пеленга в новое положение, (точка Аα2 с координатами ΔZDα2, ΔXDβ2), что приводит к изменению базового расстояния на величину ΔБα2 (зона Е).
Задача предлагаемого технического решения - проведение автоматизированного оперативного уточнения параметров схемы измерения углов-пеленгов (учет изменения координат точки отсчета углов-пеленгов при каждом измерении) в процессе работы устройства, что особенно важно при малых значениях расстояния между подвижным и неподвижным объектами.
Целью предлагаемого способа локации РИ является повышение точности отсчета координат РИ за счет коррекции координат точек отсчета углов-пеленгов РИ.
Сущность предлагаемого технического решения заключается в новом наборе действий при определении координат РИ, когда, определив угол-пеленг РИ, используют полученное значение для определения смещения точки отсчета угла-пеленга, а затем полученное значение смещения используют для коррекции параметров геометрической схемы измерений, принятой для расчета координат РИ.
Поставленная цель достигается тем, что в способе, основанном на определении углов-пеленгов РИ, определение углов пеленгов источников излучения осуществляют с помощью двух оптико-локационных блоков, каждый из которых содержит сканирующую отражающую поверхность, объектив и фотоприемник, а в качестве точки отсчета углов-пеленгов используют точку, расположенную на пересечении сканирующей отражающей поверхности и оптической оси объектива, причем при определении углов-пеленгов определяют смещение точек отсчета углов-пеленгов, которое используют при определении координат источников излучения. Например, корректируют значение расстояния между точками отсчета углов-пеленгов в системе, где используются несколько ОЛБ, либо корректируют предварительно измеренные значения углов-пеленгов.
Устройство дистанционного определения координат источников излучения содержит углоизмерительный оптико-локационный блок, блок определения координат источников излучения, а также блок определения смещения точек отсчета углов-пеленгов.
Блок определения координат РИ может содержать узел ввода и хранения данных о координатах местоположения базовых точек отсчета углов-пеленгов в системе координат оптико-локационных блоков, сумматор и узел расчета координат источников излучения.
Изложенная сущность предложенного способа и устройства поясняется следующим описанием и чертежами, где изображены:
Фиг.1 - блок-схема известного устройства локации источников излучения;
Фиг.2 - геометрическая схема определения координат РИ с использованием сканирующих зеркальных призм;
Фиг.3 - геометрическая схема смещения точек отсчета углов-пеленгов при использовании сканирующих зеркальных призм;
Фиг.4 - блок-схема устройства дистанционного определения ориентации подвижного объекта с учетом изменения базового расстояния между точками отсчета углов пеленгов;
Фиг.5 - оптическая схема сканирующего оптико-локационного блока.
В качестве примера реализации предлагаемого способа определения положения РИ рассмотрим блок-схему устройства определения координат РИ, установленных на подвижном объекте (защитном шлеме), в котором обеспечен автоматический учет изменения расстояния между точками отсчета углов-пеленгов в оптико-локационных блоках, представленную на Фиг.4.
Устройство содержит РИ 1 (точечные излучатели M1, M2 и М3), размещенные на подвижном объекте (защитном шлеме) 2, ОЛБ 3 и 4, а также блок определения углов-пеленгов 5, блок 6 определения координат РИ, блок 7 определения ориентации подвижного объекта. При этом ОЛБ содержит объектив 8, светофильтр 9, фотодетектор 10, сканирующую зеркальную призму 11, зеркало 12. Устройство также содержит блок 13 определения величины смещения точек отсчета углов-пеленгов, блок 14 ввода и хранения данных расстояния между оптико-локационными блоками 3 и 4, сумматор 15.
Данные о расстояниях установки оптико-локационных блоков относительно друг друга, расстояние между точками А и В, т.е. Б0, которые определяются компоновкой устройства, предварительно вводятся в узел 14, где и хранятся на весь период работы устройства. Узел 14 ввода и хранения может быть выполнен в виде набора переключателей, формирующих соответствующий двоичный код, либо в виде микросхемы перепрограммируемой памяти.
В оптико-локационных блоках 3, 4, где применена вращающаяся призма, - данные об угле поворота призмы 11 в момент, когда излучение попадает на фотодетектор 10. На базе этих данных, а также данных о конструктивных параметрах ОЛБ в блоке 5 производится определение углов-пеленгов РИ. Так, на основании сигналов, поступающих из блока 4, определяются углы-пеленги αi, где i - номер источника излучения, а на основании сигналов оптико-локационного блока 3 определяются углы-пеленги βi. Углы-пеленги αi и βi передаются в блок 6 определения координат реперных излучателей, где хранятся весь период следующего цикла определения углов-пеленгов.
Одновременно значения углов-пеленгов αi и βi поступают на вход блока 13 определения величины смещения точек отсчета углов-пеленгов, т.е. изменения базового расстояния между точками отсчета. В этом блоке на основании измеренных углов-пеленгов определяют дополнительные смещения точек. Так, для блока 4 это дополнительное смещение точки засветки фотоприемника и соответствующее эквивалентное смещение точки отсчета для каждого измеренного угла, т.е. формируется значение ΔБ(αi), а для блока 3 это смещение точки отсчета на грани призмы для каждого измеренного угла, т.е. формируется значение ΔБ(βi).
Сигналы, соответствующие наборам измерений на данный РИ, т.е. значения ΔБ(αi), ΔБ(βi) на РИ M1 и на РИ M2 с выхода блока 13 поступают на первый вход сумматора 15, на второй вход которого также поступают значения постоянной части базового расстояния Б0 с узла 14 ввода и хранения данных координат базовых точек отсчета углов-пеленгов в оптико-локационных блоках. С выхода сумматора 15 сигналы, соответствующие расчетному расстоянию между точками отсчета углов-пеленгов Бi=Б0±ΔБ(αi)±ΔБ(βi), поступают в блок 6.
В блоке 6 после завершения цикла определения углов-пеленгов и соответствующего им расстояния между точками отсчета углов-пеленгов на основании полученных данных производится определение координат реперных источников, например по формулам (2) и (3). Для этого сигналы базового расстояния Бi=Б0±ΔБ(αi)±ΔБ(βi) при измерении углов-пеленгов для каждой точки Мi одновременно со значениями соответствующих углов пеленгов αi и βi с помощью вспомогательных вычислительных средств формируют сигнал, соответствующий пространственным координатам реперных излучателей.
С выхода блока 6 пространственные координаты реперных излучателей Mi (X,Y,Z) поступают на вход блока 7 определения углов ориентации подвижного объекта. В блоке 7, используя данные о пространственных координатах РИ Мi, а также учитывая данные их взаимного расположения на подвижном объекте, производится определение параметров ориентации подвижного объекта - углов ϕy, ϕz вектора ориентации защитного шлема.
Блоки определения углов-пеленгов, координат реперных излучателей, ориентации подвижного объекта, определения корректирующих поправок могут быть выполнены с использованием стандартных наборов построения импульсной и вычислительной техники.
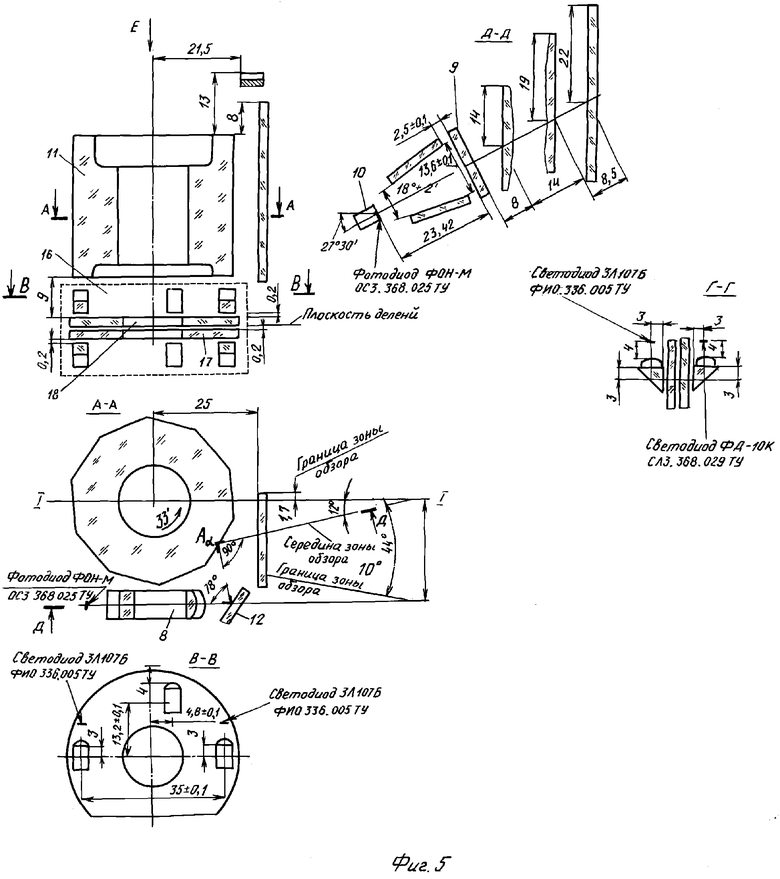
В качестве примера одного из вариантов выполнения оптико-локационного блока, выполненного на базе сканирующей призмы, на Фиг.5 представлена оптическая схема оптико-локационного блока нашлемной системы целеуказания. Оптическая схема содержит сканирующую призму 11, зеркало 12, объектив 8 с узким полем зрения, светофильтр 9 и фотодетектор 10, а также лимбовое устройство 15 отсчета углов разворота призмы 11. Излучение от РИ проходит через входное стекло 16 и, отражаясь от зеркальной грани сканирующей призмы 11, зеркала 12, попадает через светофильтр 9 на вход объектива 10 и засвечивает фотодетектор 10. Угол поворота призмы 11 определяется с помощью лимбового устройства 16, которое представляет собой два лимба, один из которых, лимб 17, закреплен в корпусе блока, а второй, лимб 18, закреплен на оси призмы и вращается вместе с ней. При расположении РИ на центральной оси зоны сканирования его центральный луч излучения отражается от зеркальной грани призмы в точке Аα, при перемещении РИ по зоне сканирования точка отражения также смещается по грани призмы (выражение 6). Учет этого смещения в значении базового расстояния между точками отсчета углов-пеленгов в системе из двух оптико-локационных блоков повышает точность определения координат РИ.
По сравнению с прототипом предлагаемый способ и устройство имеют следующее преимущество:
- осуществляется автоматическое определение смещения точек отсчета углов-пеленгов, используя которые обеспечивается повышение точности определения координат источников излучения и, как следствие, параметров ориентации подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ САМОЛЕТА-ЗАПРАВЩИКА И КОНУСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2275651C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
Способ включает определение углов-пеленгов источников излучения, которое осуществляют с помощью двух оптико-локационных блоков, каждый из которых содержит сканирующее зеркало, объектив и фотоприемник. В качестве точки отсчета углов-пеленгов используют точку, расположенную на пересечении сканирующего зеркала и оптической оси объектива. При определении углов-пеленгов определяют смещение точек отсчета углов-пеленгов за счет сканирования и определяют изменение расстояния между оптико-локационными блоками, в качестве которого принимают расстояние между точками отсчета углов-пеленгов в оптико-локационных блоках, которое используют при определении координат источников излучения. В устройстве дистанционного определения координат источников излучения два оптико-локационных блока соединены с блоком определения углов-пеленгов источников излучения, соединенным с блоком определения координат источников излучения, и введены блок определения смещения точек отсчета углов-пеленгов, блок ввода и хранения данных расстояния между оптико-локационными блоками и сумматор. Выход блока определения углов-пеленгов соединен с входом блока определения смещения точек отсчета углов-пеленгов, выходы блока определения смещения точек отсчета углов-пеленгов и блока ввода и хранения данных расстояния между оптико-локационными блоками соединены с сумматором, выход которого соединен с блоком определения координат источников излучения. Обеспечивается повышение точности отсчета координат РИ за счет коррекции координат точек отсчета углов-пеленгов РИ. 2 н.п. ф-лы, 5 ил.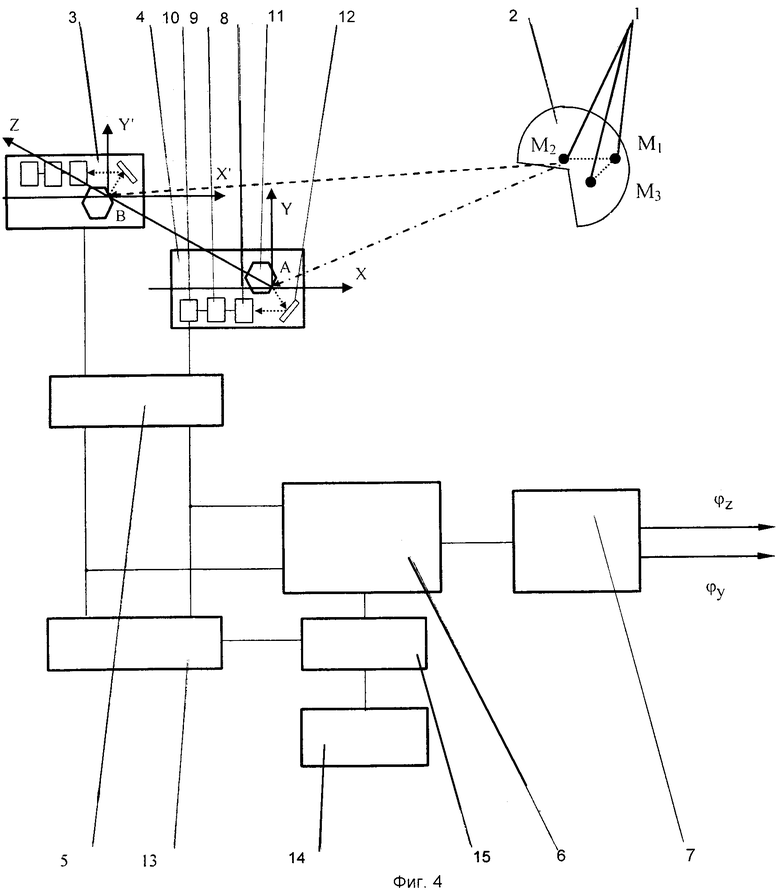
| GB 2002986 А, 28.02.1979 | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВОЗДУХОПРОНИЦАЕМОСТИ ФИЛЬТРОВАЛЬНОЙ ТКАНИ | 0 |
|
SU294101A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 5214285 A, 25.05.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |

