Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Известен способ компенсации аддитивной температурной погрешности мостовой схемы (см. патент №2231752 «Способ настройки тензорезисторных датчиков с мостовой измерительной цепью» авторы Тихоненков В.А. и Тихоненков Е.В.), заключающийся в предварительной балансировке мостовой цепи, определении температурного коэффициента сопротивления (ТКС) всех плеч сбалансированной мостовой цепи и установке в определенное плечо, параллельно с рабочим тензорезистором, термонезависимого компенсационного резистора Rш расчетной величины с последующей балансировкой мостовой схемы без изменения ТКС балансируемого плеча.
Однако использование данного метода при настройке датчиков имеет ряд недостатков, так как балансировка мостовой цепи без изменения температурного коэффициента сопротивления плеча может быть осуществлена либо за счет подбора балансировочного резистора Rб с ТКС, равным ТКС балансируемого плеча, либо за счет лазерной или электроэрозионной подгонки при микроэлектронном исполнении датчика.
В первом случае выполнить равенство ТКС рабочего тензорезистора и балансировочного резистора крайне сложно по следующим причинам:
1) для исключения градиента температур между рабочим тензорезистором и балансировочным резистором последний должен устанавливаться непосредственно на упругом элементе в зоне установки тензорезисторов, что значительно усложняет конструкцию датчика;
2) подобрать ТКС балансировочного резистора, равным ТКС рабочего тензорезистора с точностью хотя бы ±1%, можно лишь при исполнении балансировочного резистора из материала и по технологии рабочего тензорезистора. Однако даже в этом случае, получение равенства ТКС балансировочного резистора и рабочего тензорезистора с заданной точностью является проблематичной задачей, так как это возможно либо при использовании селективной подборки, что значительно повышает трудоемкость и, следовательно, стоимость датчика, либо использованием высококлассного оборудования при высокой отработанности технологического процесса, что также приводит к повышению стоимости датчика. Действительно, даже при тонкопленочном исполнении тензорезисторов в едином вакуумном цикле из одной навески разброс ТКС на одном упругом элементе достигает ±10% и более, что и приводит к необходимости компенсации аддитивной температурной погрешности.
Во втором случае неизменность ТКС балансируемого плеча мостовой цепи достигается за счет лазерной или электроэрозионной подгонки тензорезисторов датчиков в микроэлектронном исполнении, что осуществляется достаточно просто. Однако эта технология подгонки тензорезисторов имеет свои недостатки
- значительно увеличивается временная нестабильность доработанного тензорезистора за счет нарушения поверхностного слоя пленки;
- значительно уменьшается надежность за счет возникновения микротрещин в зоне реза, которые быстро развиваются при воздействии деформаций упругого элемента в процессе эксплуатации.
Влияние несоответствия ТКС балансировочного резистора ТКС рабочего плеча на аддитивную температурную погрешность рассмотрим на примере.
Пример
Определить изменение аддитивной температурной чувствительности тензорезисторного датчика с равноплечей мостовой измерительной цепью при балансировке датчика сопротивлением с ТКС, отличным от ТКС тензорезистора балансируемого плеча, если известно
- сопротивление плеч R=1000 Ом;
- ТКС тензорезисторов соответственно α1=4,5·10-4 1/°С; α2=α3=α4=4,0·10-4 1/°С;
- ТКС компенсационного термозависимого резистора αβ=40·10-4 1/°С;
- суммарное относительное изменение сопротивления мостовой цепи от номинального значения измеряемого параметра  ;
;
- ТКС балансировочного резистора αб=3,5·10-4 1/°С;
- диапазон изменения температуры Δt=100°С;
- допустимое значение аддитивной температурной чувствительности датчика после настройки должно быть в пределах Sot=±1·10-4 1/°С.
Решение
Согласно патенту №2231752, считая, что в исходном состоянии мостовая измерительная цепь сбалансирована (по условию задачи все плечи равны), и так как αr=(α1+α4)-[α2+α3)=0,5·10-4 1/°С, то с ростом температуры начальный уровень выходного сигнала будет изменяться в положительную сторону. Следовательно, компенсационный термонезависимый резистор необходимо включать в плечи, воспринимающие деформацию растяжения от измеряемого параметра, то есть параллельно тензорезисторам R1 или R4. Тогда балансировку необходимо осуществлять включением резистора Rб последовательно тензорезисторам R1 или R4. Выберем плечо включения компенсационного резистора R1, а плечо включения балансировочного резистора R4. Величину компенсационного резистора можно рассчитать по формуле

Общее сопротивление после подключения компенсационного резистора в плечо R1

Номинал балансировочного резистора после подключения компенсационного резистора может быть определен из условия баланса
R1общ·(R4+Rб)=R2·R3.
Откуда номинал балансировочного резистора можно определить как

Номинал плеча R4общ=R4+Rб=1000+125=1125 Ом с ТКС, равным ТКС тензорезистора α4=4·10-4 1/°С.
Тогда можно оценить температурное изменение начального уровня выходного сигнала и аддитивную температурную чувствительность датчика
1. Без проведения настройки
- начальный выходной сигнал датчика при нормальной температуре
- начальный выходной сигнал датчика при Δt=100°С
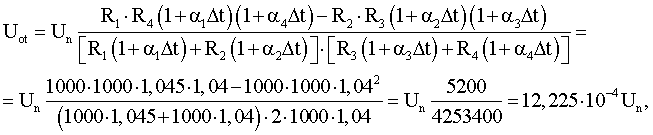
- изменение начального выходного сигнала от изменения температуры
ΔUot=Uot-Uo=12,225·10-4Un,
- аддитивная температурная чувствительность датчика

где Un - напряжение питания датчика;
к=R1/R2=R3/R4 - коэффициент симметрии мостовой цепи;
Uном - номинальный выходной сигнал датчика при номинальном значении измеряемого параметра.
2. После проведения настройки
- начальный выходной сигнал датчика при нормальной температуре

- начальный выходной сигнал датчика при Δt=100°С
- аддитивная температурная чувствительность датчика

Таким образом, используемый способ настройки не позволяет получить требуемую степень компенсации аддитивной температурной погрешности и допустимая точность настройки лежит в пределах Sot=±2·10-4 1/°С. Это объясняется тем, что в процессе вывода выражения для расчета компенсационного резистора пренебрегали величинами второго порядка малости. Действительно, если вместо принятого выражения для ТКС плеча, зашунтированного термонезависимым компенсационным резистором,
принять точное его значение

то, исходя из температурного баланса мостовой цепи, можно записать

Тогда, решая полученное выражение относительно Rш, получим
Если использовать полученное выражение в нашем примере, то

Балансировочный резистор определится как

Общее сопротивления после подключения компенсационного резистора в плечо R1

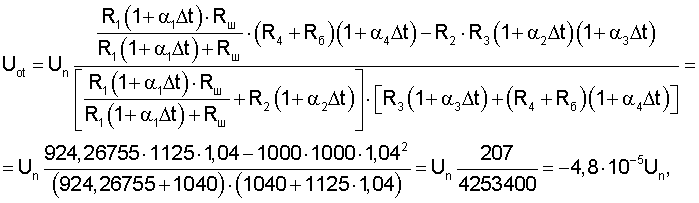
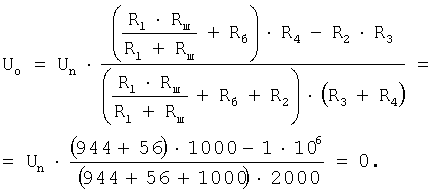
Начальный выходной сигнал датчика при нормальной температуре

Начальный выходной сигнал датчика при Δt=100°С
Аддитивная температурная чувствительность датчика

что обеспечивает требуемую точность компенсации аддитивной температурной погрешности.
Для случая балансировки мостовой цепи сопротивлением с ТКС, отличным от ТКС балансируемого плеча в соответствии с исходными данными.
В этом случае U0=3,1·10-4Un; ΔUot=Uot=-1,81·10-4Un; Sot=-7,2·10-4 1/°С. Тогда при наличии разброса ТКС балансировочного резистора и рабочего тензорезистора балансируемого плеча в пределах 10% температурную нескомпенсированность аддитивной погрешности можно оценить в пределах Sot=±7,5·10-4 1/°C.
Таким образом, разброс ТКС балансировочного резистора и рабочего тензорезистора даже в пределах 10% не позволяет получить требуемую степень компенсации аддитивной температурной погрешности. Отсюда следует вывод о необходимости разработки способа компенсации аддитивной температурной погрешности с учетом разного значения ТКС балансировочного резистора и тензорезистора балансируемого плеча.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, который позволил бы повысить надежность, технологичность и точность компенсации аддитивной температурной погрешности в процессе настройки.
Технический результат - повышение надежности, технологичности и точности в процессе настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Указанный технический результат достигается тем, что расчет компенсационного резистора производят для предварительно сбалансированной мостовой схемы из условия выравнивания сумм ТКС тензорезисторов, попарно находящихся в противолежащих плечах мостовой схемы с учетом изменения ТКС балансируемого плеча при последовательном подключении к рабочему тензорезистору балансировочного резистора с ТКС, отличающемся от ТКС тензорезистора.
Это достигается тем, что после определения плеча подключения компенсационного резистора определяют плечо подключения балансировочного резистора из условия знака начального выходного сигнала при подключении компенсационного резистора. При подключении компенсационного резистора в плечи, воспринимающие деформацию растяжения (плечо R1 или R4), начальный выходной сигнал будетизменяться в отрицательную сторону, тогда балансировочный резистор необходимо включать либо в то же плечо, либо в противолежащее плечо относительно плеча подключения компенсационного резистора, то есть в плечи воспринимающие деформацию растяжения (плечо R1 или R4). При подключении компенсационного резистора в плечи, воспринимающие деформацию сжатия (плечо R2 или R3), начальный выходной сигнал будет изменяться в положительную сторону, тогда балансировочный резистор необходимо включать либо в то же плечо, либо в противолежащее плечо относительно плеча подключения компенсационного резистора, то есть в плечи, воспринимающие деформацию сжатия (плечо R2 или R3).
Расчет номинала компенсационного резистора производят исходя из того, что аддитивная температурная погрешность сбалансированной мостовой схемы зависит только от равенства сумм ТКС тензорезисторов, попарно расположенных в противолежащих плечах мостовой схемы. При этом рассчитывают ТКС плеч, к которым подключаются компенсационный и балансировочный резисторы, так как их подключение изменяют ТКС одноименных плеч, и с учетом изменения их ТКС производят расчет номинала компенсационного резистора для заданных значений ТКС компенсационного и балансировочного резисторов.
После подключения расчетного значения компенсационного резистора с заданным ТКС в ранее выбранное плечо производят балансировку мостовой цепи подключением балансировочного резистора с заданным ТКС в ранее выбранное плечо. Номинал балансировочного резистора определяется экспериментальным путем после подключения переменного резистора в выбранное плечо.
Так как необходимым условием компенсации является требование независимости компенсационного резистора от температуры и с целью конструктивного упрощения датчика целесообразно компенсационный и балансировочный резисторы выполнять с минимально допустимым значением ТКС в пределах ±1·10-3 ТКС рабочих тензорезисторов. При этом с целью уменьшения диапазона воздействующих температур их необходимо располагать в датчике вне зоны действия температурного поля измеряемого параметра, например во вторичном преобразователе.
Способ осуществляется следующим образом.
В предлагаемом способе, как и в случае компенсации по прототипу, компенсация достигается за счет выравнивания ТКС тензорезисторов, включенных в противоположные плечи мостовой измерительной цепи с одновременной балансировкой мостовой схемы.
Он основан на том, что изменение начального уровня выходного сигнала сбалансированной мостовой схемы зависит только от разбросов ТКС резисторов. Это означает, что для компенсации аддитивной температурной погрешности необходимо выполнить условие баланса мостовой схемы при воздействии температуры, которое будет определяться равенством сумм ТКС противолежащих плеч (α1+α4)-(α2+α3)=0, то есть необходимо выровнять ТКСы плеч мостовой цепи.
Но так как параллельное включение термонезависимого компенсационного резистора и последовательное включение балансировочного резистора к рабочим тензорезисторам изменяет ТКСы плеч, к которым они подключаются, то для выполнения температурного баланса мостовой цепи при одновременной ее балансировке необходимо рассчитать ТКСы этих плеч из условия баланса мостовой цепи.
Приведем вывод выражения для расчета номинала компенсационного резистора Rщ, подключаемого в плечо R1, при одновременной балансировке мостовой цепи балансировочным резистором Rб, подключаемым в плечо R4.
При параллельном подключении компенсационного резистора Rш к тензорезистору R1 общее сопротивление плеча станет
а общее сопротивление плеча при воздействии температуры

Изменение общего сопротивления плеча при изменении температуры

где α1 - ТКС тензорезистора R1;
Δt - диапазон изменения температуры.
ТКС общего сопротивления плеча

При последовательном подключении балансировочного резистора Rб к тензорезистору R4 при одновременном подключении компенсационного резистора условие балансировки мостовой цепи примет вид
R1общ·(R4+Rб)=R2·R3.
Откуда величина балансировочного резистора определится как

При последовательном подключении балансировочного резистора Rб к тензорезистору R4 общее сопротивление плеча станет
Сопротивление R4общt при изменении температуры будет иметь вид

где α4 - ТКС тензорезистора R4.
Приращение сопротивления R4общt от изменения температуры
ΔR4общt=R4общt-R4общ=R4·α4·Δt.
ТКС плеча R4общ после подключения балансировочного резистора будет иметь вид

Зная ТКСы всех плеч мостовой цепи с учетом подключения компенсационного и балансировочного резисторов, можно, используя выражения (1) и (3), составить уравнение температурного баланса мостовой цепи

где α2 и α3 - ТКСы тензорезисторов R2 и R3 соответственно.
Выражая уравнение (4) относительно компенсационного резистора Rш, получим

Решая полученное выражение (5) относительно Rш, можно рассчитать номинал компенсационного резистора с учетом последующей балансировки мостовой цепи резистором Rб. Отрицательное значение корня данного уравнения является мнимым, и его не берут в расчет.
Аналогично рассуждая, можно вывести выражения для расчета номиналов компенсационных резисторов для всех возможных вариантов включения компенсационного и балансировочного резисторов.
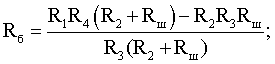
При включении компенсационного и балансировочного резисторов в противолежащие плечи
- Rш в плечо R4 и Rб в плечо R1

- Rш в плечо R2 и Rб в плечо R3

- Rш в плечо R3 и Rб в плечо R2

Рассмотренные варианты включения охватывают все варианты при включении компенсационного и балансировочного резисторов в противоположные плечи мостовой цепи. При этом рассмотрены включения компенсационного и балансировочного резисторов как в плечи, воспринимающие деформацию растяжения, так и в плечи, воспринимающие деформацию сжатия. Анализ полученных выражений позволяет вывести обобщенное выражение для расчета номинала компенсационного резистора для всех рассмотренных случаев. Таким образом, при включении компенсационного и балансировочного резисторов в противолежащие плечи компенсационный резистор можно рассчитать из выражения

где Rш - номинал сопротивления компенсационного термонезависимого резистора;
Rк и Rn - номинал сопротивления тензорезистора плеча, к которому подключается компенсационный резистор и противолежащего плеча соответственно;
Rc1 и Rс2 - номинал сопротивления тензорезистора смежного плеча относительно тензорезистора, к которому подключается компенсационный резистор, и второго смежного плеча соответственно;
αc1 и αc2 - ТКСы тензорезисторов соответственно Rc1 и Rc2, смежных плеч схемы относительно плеча, к которому подключают компенсационный резистор;
αк и αn - температурный коэффициент сопротивления тензорезистора плеча, к которому подключается компенсационный резистор, и противолежащего плеча соответственно;
Δt - диапазон изменения температуры,
арифметические знаки (+) и (-) берутся по верхним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию растяжения, и по нижним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию сжатия.
При включении компенсационного и балансировочного резисторов в одно плечо
- Rш и Rб в плечо R1


- Rш и Rб в плечо R4


- Rш и Rб в плечо R2


- Rш и Rб в плечо R3
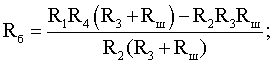


Рассмотренные варианты включения охватывают все варианты при включении компенсационного и балансировочного резисторов в одно плечо мостовой цепи. При этом рассмотрены включения компенсационного и балансировочного резисторов как в плечи, воспринимающие деформацию растяжения, так и в плечи, воспринимающие деформацию сжатия. Анализ полученных выражений позволяет вывести обобщенное выражение для расчета номинала компенсационного резистора для всех рассмотренных случаев. Таким образом, при включении компенсационного и балансировочного резисторов в одно плечо компенсационный резистор можно рассчитать из выражения

арифметические знаки (+) и (-) берутся по верхним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию растяжения, и по нижним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию сжатия.
После установки компенсационного резистора с расчетным номиналом в ранее определенное плечо производят балансировку мостовой схемы за счет последовательного подключения к определенному ранее плечу балансировочного термонезависимого резистора. Номинал балансировочного резистора определяется экспериментальным путем после подключения переменного резистора в выбранное плечо. Способ определения плеча и ТКС балансировочного резистора изложен в описании.
Предлагаемый способ компенсации позволяет простыми методами выбрать вариант схемы компенсации. Повышение точности компенсации аддитивной температурной погрешности достигается тем, что
- в процессе определения номинала компенсационного резистора произведен учет влияния на ТКС балансируемого плеча номинала и ТКС балансировочного резистора;
- определены критерии по выбору ТКС компенсационного и балансировочного резисторов в зависимости от технологии изготовления и места установки их в конструкции датчика.
Повышение надежности при эксплуатации датчика в микроэлектронном исполнении происходит за счет исключения влияния лазерной или электроэрозионной подгонки тензорезисторов.
Повышение технологичности в процессе изготовления датчика достигается за счет исключения жестких требований к получению заданного ТКС при изготовлении балансировочного резистора, при этом достаточно определить ТКС с точностью до ±0,5%.
Для проверки эффективности и точности предлагаемого способа рассмотрим пример настройки датчика по аддитивной температурной погрешности.
Пример
Провести компенсацию аддитивной температурной погрешности тензорезисторного датчика с равноплечей мостовой измерительной цепью, если известно
- сопротивления тензорезисторов мостовой цепи соответственно равны R1=R3=R2=R4=1000 Ом;
- ТКСы тензорезисторов соответственно равны α1=4,5·10-4 1/°С; α2=α3=α4=4·10-41/°C;
- ТКСы компенсационного и балансировочного термонезависимых резисторов αш=αб=0;
- суммарное относительное изменение сопротивления мостовой цепи от номинального значения измеряемого параметра ;
- диапазон изменения температуры Δt=100°С;
- допустимое значение аддитивной температурной чувствительности датчика после настройки должно быть в пределах Sot=±1·10-4 1/°С.
Решение
Считая, что в исходном состоянии мостовая измерительная цепь сбалансирована (по условию задачи все плечи мостовой цепи равны), и так как αr=[α1+α4)-(α2+α3)=0,5·10-41/°C, то с ростом температуры начальный уровень выходного сигнала будет изменяться в положительную сторону. Следовательно, компенсационный термозависимый резистор необходимо включать в плечи, воспринимающие деформацию растяжения от измеряемого параметра, то есть параллельно тензорезисторам R1 или R4. Тогда балансировку необходимо осуществлять включением резистора Rб последовательно тензорезисторам R1 или R4. Выберем плечо включения компенсационного резистора R1 и плечо включения балансировочного резистора R1. Величину компенсационного резистора можно рассчитать путем решения уравнения

Действительным корнем данного уравнения для заданных значений по условию задачи является Rш=16856 Ом.
Величину балансировочного резистора можно рассчитать по формуле

Начальный уровень выходного сигнала мостовой цепи после температурной настройки можно определить по формуле
Начальный уровень выходного сигнала мостовой цепи при изменении температуры после температурной настройки можно определить по формуле
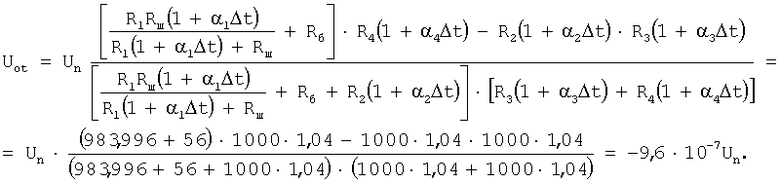
Изменение начального уровня выходного сигнала от изменения температуры после температурной настройки можно определить как
ΔUot=Uot-U0=-9,6·10-7Un.
Аддитивная температурная чувствительность датчика после температурной настройки

Из приведенного расчета видно, что предлагаемый способ компенсации аддитивной температурной погрешности обеспечивает требуемую точность настройки.
Датчик перед началом испытаний балансируют с помощью технологического балансировочного резистора. По знаку изменения начального выходного сигнала при изменении температуры в положительную сторону определяют плечо включения компенсационного резистора параллельно с рабочим резистором. Определяют плечо, в которое будет подключаться последовательно с рабочим резистором балансировочный термонезависимый резистор после настройки датчика. Балансировочный термонезависимый резистор подключают либо в плечо, содержащее компенсационный резистор, либо в противоположное плечо. Рассчитывают номинал компенсационного резистора с учетом в зависимости от места установки термонезависимого балансировочного резистора. В формуле изобретения приводятся зависимости для расчета номинала сопротивления компенсационного резистора. Технический результат заключается в повышении технологичности настройки тензорезисторных датчиков по аддитивной температурной погрешности и их точности.
Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, заключающийся в предварительной балансировке мостовой схемы, определении температурных коэффициентов сопротивления (ТКС) всех плеч мостовой схемы с учетом введения балансировочного резистора при предварительной балансировке и определении плеча сбалансированного датчика, в которое подключают термонезависимый компенсационный резистор параллельно рабочему тензорезистору, отличающийся тем, что определяют плечо, в которое будет подключаться балансировочный термонезависимый резистор, после настройки датчика из условия последовательного подключения с рабочим тензорезистором либо в то же плечо, либо в противоположное плечо относительно плеча подключения компенсационного резистора рассчитывают величину компенсационного резистора, решая уравнение:
при установке компенсационного и балансировочного резисторов в противолежащих плечах

при установке компенсационного и балансировочного резисторов в одном плече

где Rш - номинал сопротивления компенсационного термонезависимого резистора;
Rк и Rn - номинал сопротивления тензорезистора плеча, к которому подключается компенсационный резистор, и противолежащего плеча соответственно;
Rc1 и Rc2 - номинал сопротивления тензорезистора смежного плеча относительно тензорезистора, к которому подключается компенсационный резистор, и второго смежного плеча соответственно;
αc1 и αc2 - ТКС тензорезисторов соответственно Rc1 и Rc2 смежных плеч схемы относительно плеча, к которому подключают компенсационный резистор;
αк и αn - ТКС тензорезистора плеча, к которому подключается компенсационный резистор, и противолежащего плеча соответственно;
Δt - диапазон изменения температуры,
действительными корнями уравнений являются корни с положительным значением компенсационного резистора Rш, арифметические знаки (+) и (-) в уравнениях берутся по верхним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию растяжения, и по нижним значениям при установке компенсационного резистора в плечи, воспринимающие деформацию сжатия, после установки компенсационного резистора расчетной величины в определенное ранее плечо мостовой схемы производят балансировку мостовой схемы подключением балансировочного термонезависимого резистора в определенное ранее плечо последовательно с рабочим тензорезистором.
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ | 2003 |
|
RU2231752C1 |
| СГИБОВ А.П | |||
| Температурная компенсация ухода нуля мостового преобразователя // Приборы и системы управления | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| US 4172389 А, 30.10.1979. | |||

