Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Известен косвенный способ компенсации аддитивной температурной погрешности мостовой схемы (см. Патент на изобретение RU 2307998 C1, G01В 7/16, «Косвенный способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности», зарегистрированный 10.10.2007 г.), заключающийся в предварительной балансировке мостовой схемы в нормальных температурных условиях в пределах ±0,5% номинального выходного сигнала, предварительной сборке датчика с учетом герметизации внутренней полости для датчиков относительного давления, установке его в технологический штуцер с номинальным значением момента затяжки и определении плеча сбалансированного датчика, в которое подключают технологический компенсационный термозависимый резистор последовательно рабочему тензорезистору, с последующей балансировкой мостовой схемы балансировочным термонезависимым резистором, определяют начальный выходной сигнал датчика при нормальной температуре Тo и температуре эксплуатации датчика Т соответственно и рассчитывают номинал рабочего компенсационного термозависимого резистора.
Однако в связи с тем, что в процессе вывода аналитического выражения для расчета компенсационного термозависимого резистора был введен ряд допущений, то ошибка в процессе настройки достигает 15% Sot допустимого. К допущениям, введенным при выводе аналитического выражения для расчета компенсационного термозависимого элемента, относятся:
1. Замена в аналитическом выражении 0,02α2 на 0,02α1 в связи с незначительным отличием α2 и α1 в пределах 0,1α1.
2. Проведение повторной балансировки мостовой цепи, после включения технологического компенсационного резистора, термонезависимым балансировочным резистором приводит к изменению ТКС плеча балансировки и, как результат, к изменению αr, которое было оценено через выходные сигналы Uo и Uot до установки
Rβm. Поэтому дальнейшее использование значения αr при выводе аналитического выражения для расчета компенсационного термозависимого элемента приводит к появлению дополнительной ошибки в расчете Rβ.
3. Проведение окончательной балансировки мостовой цепи, после установки расчетного значения компенсационного термозависимого резистора, термонезависимым балансировочным резистором приводит к изменению ТКС плеча балансировки и, как результат, появлению дополнительной ошибки в расчете Rβ.
Так же из-за введенных жестких ограничений на термонезависимый балансировочный резистор по ТКС (ТКС должен быть не более ±0,1% ТКС рабочих тензорезисторов, что при требуемой точности составляет порядка 1·10-7 1/°C) потребуется использование точных резисторов. Это технологически неудобно, так как существующие на сегодняшний день промышленные резисторы, как правило, не удовлетворяют этому требованию, и приходится использовать специальные методы, такие как, например, селективная подборка, что значительно увеличивает время производства и, следовательно, экономически невыгодно.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка косвенного способа настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, который позволил бы повысить технологичность и точность компенсации аддитивной температурной погрешности в процессе настройки.
Технический результат - повышение технологичности и точности в процессе настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Указанный технический результат достигается тем, что:
1. Повторную балансировку мостовой цепи после подключения технологического термозависимого компенсационного резистора Rβm производят без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора, установленного в смежном плече, что позволяет использовать полученные значения Uo и Uot, снятые до установки Rβm, при расчете номинала компенсационного термозависимого резистора Rβ.
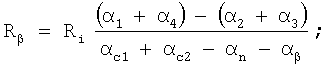
2. Расчет номинала термозависимого компенсационного резистора производят для предварительно сбалансированной мостовой схемы из условия выравнивания сумм ТКС тензорезисторов, попарно находящихся в противолежащих плечах мостовой схемы (см. Патент на изобретение RU 2265802 C1, G01В 7/16, «Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности», зарегистрированный 10.12.2005 г.) по формуле:
- при подключении термозависимого компенсационного резистора в плечи мостовой цепи, воспринимающие деформацию растяжения (R1:R4)
- при подключении термозависимого компенсационного резистора в плечи, воспринимающие деформацию сжатия (R2:R3)
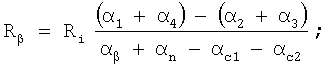
где Ri - номинал сопротивления плеча, к которому подключается термозависимый компенсационный резистор;
αn, αc1, αc2 - температурные коэффициенты сопротивления тензорезисторов смежных и противолежащего плеч схемы, относительно плеча, к которому подключают термозависимый компенсационный резистор;
α1, α2, α3, α4 - температурные коэффициенты сопротивления тех же тензорезисторов, привязанных к присвоенному номеру плеча мостовой схемы;
- обобщенная формула может быть представлена в виде:

Знаки (+) и (-) по верхнему ряду ставятся в том случае, если Rβ устанавливается в плечи мостовой цепи, воспринимающие деформацию растяжения (R1:R4), а по нижнему ряду - в плечи, воспринимающие деформацию сжатия (R2:R3) соответственно. Это позволяет исключить первое допущение прототипа.
3. Окончательную балансировку мостовой схемы после установки Rβ расчетного значения осуществляют без изменения ТКС балансируемого тензорезистора, например путем лазерной или электроэрозионной подгонки тензорезистора, находящегося в противоположном плече, что позволяет исключить дополнительные ошибки в расчете Rβ относительно прототипа.
4. Использование лазерной или электроэрозионной подгонки позволяет исключить селективную подборку балансировочного резистора по ТКС.
Известно, что использование лазерной подгонки может привести к повышению временной нестабильности датчика, однако существующие топологические методы формирования схемы позволяют свести к минимуму изменение временной нестабильности датчика. К ним относятся такие, при которых топология тензорезисторов выполняется с учетом подгоночных элементов, которые выводятся в виде гребенки.
Для вывода аналитического выражения по расчету номинала компенсационного термозависимого резистора через выходные сигналы можно записать аналитическое выражение начального выходного сигнала при воздействии температуры (см. Патент на изобретение RU 2307998 C1, G01В 7/16) в виде:

где α1, α2, α3, α4 - ТКСы соответствующих плеч мостовой цепи;
αr - ТКС мостовой цепи;
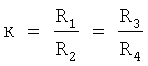 - коэффициент симметрии мостовой цепи;
- коэффициент симметрии мостовой цепи;
Un - напряжение питания мостовой цепи;
ΔT=T-To - перепад температур в процессе испытаний.
Тогда, учитывая, что при нормальной температуре начальный выходной сигнал датчика Uo, из выражения (2) можно определить ТКС мостовой цепи

Кроме того, для определения номинала компенсационного термозависимого резистора в соответствии с выражением (1) необходимо выразить через выходные сигналы ТКС компенсационного резистора αβ и выражения  .
.
Для этого в выбранное плечо мостовой цепи включают технологический компенсационный термозависимый резистор Rβm, установленный в строго определенном месте на упругом элементе в зоне установки рабочих тензорезисторов. Компенсационный резистор должен быть фиксированной величины в 2% от номинала тензорезисторов мостовой цепи. Номинал технологического компенсационного резистора выбран из условия обеспечения компенсации аддитивной температурной погрешности при максимально допустимом технологическом разбросе ТКС тензорезисторов до 10% в процессе изготовления. Изготовление и установка технологического компенсационного резистора должны производиться по технологии изготовления рабочих тензорезисторов, а ТКС его должен быть максимальным для выбранной технологии изготовления. Технологический компенсационный резистор в дальнейшем используют в качестве рабочего компенсационного элемента при его частичном задействования в рабочей схеме.
После установки технологического компенсационного резистора в мостовую цепь производят повторную балансировку при нормальной температуре, в пределах ±0,5% номинального выходного сигнала датчика, без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в смежном плече мостовой схемы относительно плеча установки Rβm. После чего снимают выходные сигналы Uoβ и Uoβt при нормальной температуре То и температуре эксплуатации датчика Т соответственно.
Тогда, согласно (2), девиация начального разбаланса датчика от температуры, при установке технологического термозависимого резистора, например, в плечо R1, будет иметь вид:

где ТКС плеча R1, после подключения технологического компенсационного резистора, в соответствии с (см. Патент на изобретение RU 2265802 C1, G01В 7/16, «Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности», зарегистрированный 10.12.2005 г.) будет иметь вид:
Вычитая уравнение (2) из выражения (4) и решая относительно ТКС плеча R1, получим:

Полученное выражение справедливо при подключении технологического компенсационного резистора в плечи мостовой цепи, воспринимающие деформацию растяжения (то есть в плечи R1 или R4). Если провести подобные вычисления для установки Rβm в плечи, воспринимающие деформацию сжатия (R2 или R3), можно вывести выражение (6) в общем виде, при установке технологического компенсационного резистора в любое плечо мостовой цепи

Знаки (+) и (-) по верхнему ряду ставятся при подключении Rβm в плечи, воспринимающие деформацию растяжения, а по нижнему ряду - в плечи, воспринимающие деформацию сжатия.
Подставляя выражение (7) в уравнение (2) и решая относительно выражения
±αc1±αc2±αn, получим:

Знаки (+) и (-) по верхнему ряду ставятся при подключении Rβm в плечи, воспринимающие деформацию растяжения, а по нижнему ряду - в плечи, воспринимающие деформацию сжатия.
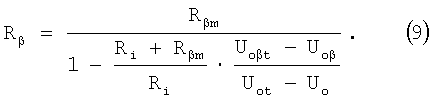
Подставляя выражения (3) и (8) в формулу (1), можно определить величину компенсационного термозависимого резистора, необходимого для компенсации аддитивной температурной погрешности датчика с учетом влияния момента затяжки, физических параметров элементов измерительной цепи и расширения газа, загерметизированного во внутренней полости датчика, через выходные сигналы и известное значение технологического термозависимого элемента
Полученное значение компенсационного термозависимого резистора устанавливается в измерительную цепь путем частичного задействования технологического компенсационного термозависимого резистора, установленного в датчике, с последующей окончательной балансировкой мостовой цепи без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в противолежащем плече мостовой схемы.
При выводе аналитического выражения для расчета номинала компенсационного термозависимого резистора Rβ не вводились допущения, как при выводе аналитического выражения для расчета Rβ в прототипе. Поэтому, если в прототипе точность подгонки аддитивной температурной чувствительности находится в пределах 15% от Sot допустимой, то предлагаемый способ позволяет получить точность подгонки, как минимум, на два порядка выше прототипа.
Для оценки эффективности данного способа компенсации проведем расчет компенсационного резистора и оценим температурную погрешность после проведения компенсации.
Пример расчета резистора Rβ косвенным методом
Исходные данные:
- номинал тензорезисторов равноплечей цепи R1=R2=R3=R4=1000 Ом;
- ТКС мостовой цепи αr=α1+α4-α2-α3=-0,4·10-41/°С;
- напряжение питания Un=10 В;
- номинал технологического компенсационного резистора Rβm=20 Ом;
- номинальное значение относительного изменения сопротивления датчика 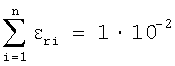 ;
;
- изменение температуры в процессе эксплуатации ΔT=100°С;
- допустимое значение аддитивной температурной чувствительности Sot=1·10-4 1/°С.
Решение
Для решения задачи необходимо задаться изменением начального выходного сигнала от воздействия температуры ΔТ, как без подключения технологического компенсационного резистора, так и при его подключении в мостовую измерительную цепь. Для правильной оценки этих изменений зададимся ТКСами всех плеч мостовой цепи из условия обеспечения заданного значения αr-α1=1,6·1041/°С; α2=α3=α4=2·104 1/°С.
Тогда, согласно (2) и (4), можно рассчитать девиацию начальных выходных сигналов датчика для заданных характеристик сбалансированной мостовой цепи при подключении и без подключения технологического компенсационного резистора в плечо R1 (плечо, выбрано исходя из отрицательного значения αr):
ΔUot=10·0,25·(-0,4·10-4)·100=-0,01 В=-10 мВ;

Для оценки температурной чувствительности не скомпенсированного по температурной погрешности датчика необходимо оценить номинальное значение выходного сигнала датчика по формуле

Тогда аддитивную температурную чувствительность датчика до компенсации можно определить по формуле как:

Из полученного значения Sot видна необходимость проведения компенсации аддитивной температурной погрешности датчика.
Рассчитаем величину термозависимого компенсационного резистора по формуле (9)

После установки расчетного компенсационного резистора в плечо R1 путем частичного задействования технологического резистора необходимо произвести балансировку датчика, без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора.
Для оценки эффективности предлагаемого способа компенсации необходимо рассчитать аддитивную температурную чувствительность датчика после проведения компенсации.
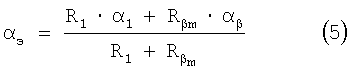
Для этого вначале необходимо рассчитать эквивалентное значение ТКС плеча R1 после установки в него расчетного значения термозависимого компенсационного резистора по формуле (5)

Тогда начальный выходной сигнал датчика при воздействии температуры будет

Принимая, что датчик в нормальных температурных условиях сбалансирован, то есть Uo=0, можно рассчитать аддитивную температурную погрешность после проведения компенсации по формуле (10)

Анализ полученных результатов показывает высокую эффективность компенсации предложенным методом. При этом точность метода будет зависеть только от точности фиксации выходных сигналов датчика, и полученная точность подгонки Sot не ниже 0,1% Sot допустимого.
Включение лазерной или электроэрозионной подгонки освобождает от необходимости введения селективной подборки баланбсировочных резисторов с ТКС 0,1% ТКС рабочих тензорезисторов, что повышает технологичность.
Изобретение относится к измерительной технике. Технический результат: повышение технологичности и точности настройки металлопленочных тензорезисторных датчиков. Сущность: после установки технологического термозависимого резистора
Rβm производят повторную балансировку мостовой измерительной схемы в пределах ±0,5% номинального выходного сигнала без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в смежном плече мостовой схемы относительно плеча установки Rβm. Определяют начальные выходные сигналы сбалансированного датчика Uoβ и Uoβt при нормальной температуре То и температуре эксплуатации Т соответственно. Рассчитывают номинал рабочего компенсационного термозависимого резистора Rβ по формуле 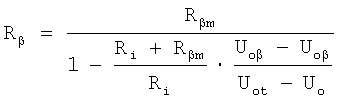 ,
,
где Ri - номинал сопротивления плеча, к которому подключается термозависимый компенсационный резистор. Полученное значение компенсационного резистора устанавливают в измерительную цепь путем частичного задействования технологического компенсационного термозависимого резистора с последующей окончательной балансировкой без изменения ТКС балансируемого плеча, например путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в противолежащем плече мостовой схемы.
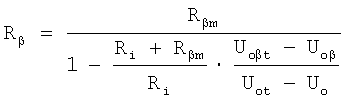
Косвенный способ настройки тензорезисторных металлопленочных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, заключающийся в том, что производят предварительную сборку датчика с учетом герметизации внутренней полости для датчиков относительного давления, устанавливают его в технологический штуцер с номинальным значением момента затяжки и производят предварительную балансировку мостовой схемы в пределах ±0,5% номинального выходного сигнала датчика, определяют начальный выходной сигнал датчика Uo и Uot при нормальной температуре То и температуре эксплуатации датчика Т соответственно, по изменению начального выходного сигнала датчика от тензорезистора определяют плечо установки компенсационного термозависимого резистора и устанавливают в это плечо технологический компенсационный термозависимый резистор Rβm, отличающийся тем, что после установки Rβm производят повторную балансировку мостовой измерительной схемы в пределах ±0,5% номинального выходного сигнала без изменения ТКС балансируемого плеча, например, путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в смежном плече мостовой схемы относительно плеча установки Rβm, определяют начальные выходные сигналы Uoβ и Uoβt при нормальной температуре То и температуре эксплуатации датчика Т соответственно и рассчитывают номинал рабочего компенсационного термозависимого резистора Rβ по формуле:
 ,
,
где Ri - номинал сопротивления плеча, к которому подключается термозависимый компенсационный резистор, полученное значение компенсационного резистора устанавливают в измерительную цепь путем частичного задействования технологического компенсационного термозависимого резистора, установленного в датчике, с последующей окончательной балансировкой мостовой цепи без изменения ТКС балансируемого плеча, например, путем лазерной или электроэрозионной подгонки тензорезистора, расположенного в противолежащем плече мостовой схемы.
| КОСВЕННЫЙ СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2307998C1 |
| RU 23073117 C1, 27.09.2007 | |||
| СПОСОБ МИНИМИЗАЦИИ АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ ОТНОСИТЕЛЬНОГО ДАВЛЕНИЯ С ГЕРМЕТИЧНОЙ ВНУТРЕННЕЙ ПОЛОСТЬЮ И МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ | 2004 |
|
RU2267755C1 |
| US 4172389 А, 30.10.1979. | |||

