Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения математических моделей каналов регулирования циклических и непрерывных технологических объектов в системах управления.
Известен способ идентификации объектов, в котором пробный сигнал наносится на прогнозируемые рабочие управления для оценки характеристик каналов регулирования (см. Нанесение экспериментальных воздействий на прогнозируемые рабочие управления / Веревкин В.И., Авдеев В.П., Лакунцов Б.А., Бурдонов Б.А., Катрич А.П. // Изв. ВУЗов. Черная металлургия. - 1975 - № 6. С.163-166.). Прогнозирование траекторий рабочего управления и заданий на выходные переменные делается для конечных интервалов времени управления процессом. При этом учитывается вся доступная информация к моментам нанесения пробных воздействий. Активное экспериментирование чередуется случайным образом с обычным функционированием промышленных систем. На интервале ожидаемого проявления эффектов пробных воздействий целесообразно размыкать регулирующие обратные связи, осуществляемые как автоматически, так и через человека, а контуры управления по возмущениям должны функционировать в обычном режиме.
Недостатком этого способа является то, в нем незаинтересованность человека-оператора в конечных результатах идентификации объекта приводит к ошибкам идентификации за счет своего стремления компенсировать эффекты действия пробных сигналов воздействием по другим каналам управления, либо предоставления ложной информации о прогнозе рабочих управлений и траектории вектора выходных величин. В этих условиях сложно, а зачастую и невозможно гарантировать выполнение условий эксперимента на протяженный отрезок времени функционирования объекта. В результате ошибка в оценках динамических характеристик каналов регулирования может стать соизмеримой с самим полезным сигналом.
Наиболее близким по технической сущности к предлагаемому является способ идентификации металлургических объектов с изменением заданий, согласно которому при активной идентификации наносится пробное воздействие по каналу заданий (см. Идентификация металлургических объектов с изменением заданий / Веревкин В.И. // Изв. ВУЗов. Черная металлургия. - 1999 - № 3. С.24-28). В этом способе к некоторому стартовому моменту времени tc человеком-оператором или автоматом прогнозируются траектория вектора рабочих управлений до конца технологического цикла, а также соответствующая траектория вектора выходных величин. В момент времени tс по команде вышестоящей управляющей системы изменяется задание, например марка стали и способ ее разливки. Далее эргатическая система управления функционирует в обычном режиме. В соответствии со сменой внешнего задания человек-оператор корректирует собственную цель - требуемое значение вектора выходных величин объекта ("точку прицеливания"). Он отказывается от первоначально намеченной траектории вектора управлений и изменяет ее для достижения новой цели. В качестве отклика рассматривается отклонение фактического значения результирующей выходной величины от прогнозируемой уставки на конец интервала памяти системы управления. Изменение траектории рабочих управлений относительно ранее прогнозируемой траектории одновременно является и изменением во времени пробного воздействия, представляющего собой направленный на достижение целей идентификации фрагмент управлений, а также траекторию дополнительных управлений, т.е. на приведение выходной величины в конце технологического цикла к новому заданному значению.
Однако пробный сигнал наносится на действующую систему управления со стороны системы, находящейся на более высокой ступени административно-производственной иерархии. В рамках же нижестоящего уровня иерархии никакого дополнительного влияния на систему не оказывается. Контуры управления систем разнесены по своим базисам и впрямую не связаны. Воздействие со стороны нижнего уровня иерархии системы на верхний уровень невозможно и даже вредно. Информация снизу вверх, естественно, поставляться может. Назначение рабочих управлений и определение точки прицеливания осуществляется в рамках данной действующей системы управления. Так эти функции может выполнять оперативный персонал эргатической системы управления. Со стороны вышестоящей системы управления воздействия представляют собой задания в общем виде, стимулы, ограничения, общесистемные критерии и т.п. В ряде случаев воздействия могут касаться как непосредственно самих рабочих управлений, так и точек прицеливания. В последнем варианте имеют место системы связного управления. Т.е. вышестоящая система управления частично или полностью берет на себя функции нижестоящей системы. В таком случае существенно изменяются как алгоритмы управления, так и ошибки прогнозирования и регулирования. Недоучет этого факта может приводить к существенному снижению точности идентификации.
Задачей изобретения является повышение качества управления за счет более правильной оценки эффекта этих управлений и, таким образом, более точного назначения численных значений управляющих воздействий.
Для этого в способе идентификации объектов с изменением заданий, включающем предварительную оценку ошибок прогнозирования вектора рабочих управлений, а также ошибок регулирования действующей системы управления, прогнозирование к стартовому моменту времени tc прогнозатором вектора рабочих управлений и соответствующей траектории вектора выходных величин до конца технологического цикла для объекта с циклическим процессом управления или на интервал времени, превосходящий либо равный интервалу памяти системы управления, для объекта с непрерывным процессом управления, изменение в момент времени tc задания по команде вышестоящей по административно-производственной иерархии управляющей системы, формирование рабочих управлений и их реализацию в обычном режиме полученного задания в действующей системе управления, по изобретению оценивают изменение степени тесноты связи управляющих решений вышестоящей и данной действующих систем, проводят дополнительное исследование и уточнение изменившихся ошибок прогнозирования и регулирования, а при автоматическом прогнозировании - и алгоритмов прогнозирования.
Сущность изобретения состоит в следующем.
При связном управлении, т.е. при вмешательстве вышестоящей системы управления в процесс принятия решений, а также в прогнозирование рабочих управлений и вектора выходных переменных объекта, меняются реализующиеся как алгоритмы прогнозирования, так и алгоритмы управления. Перед проведением эксперимента вводится дополнительная операция оценки степени тесноты связи вышестоящей и данной действующей систем управления. При изменении тесноты связи уточняются законы распределения вероятностей ошибок прогнозирования и регулирования и сами алгоритмы прогнозирования.
На чертеже приведена блок-схема действующей эргатической системы дуального управления технологическим процессом. Система дуального управления объектом содержит блок 1 - технологический объект управления (ТОУ), блок 2 - измерительная система, блок 3 - регулирующая система, блок 4 - программирующая система, блок 5 - распознающая система, блок 6 - вышестоящая система управления, 7 - первичные датчики сигналов, 8 - измерительный блок, 9 - действующая управляющая система.
Технологический объект управления (ТОУ) представляет собой, например, электросталеплавильную печь.
В качестве определяющих факторов в действующей системе управления выступают задания, устанавливаемые оператору-технологу в общем виде, стимулы, ограничения, измерительные сигналы о переменных состояниях  входных UВ и выходных воздействиях
входных UВ и выходных воздействиях  технологического объекта управления (ТОУ), которые поступают с блока 7 первичных датчиков сигналов к блоку 2 измерительной системе, а также к блоку 6. Информация о состоянии других ТОУ и организационно-технологической системы управления (ХВ) поступает к блоку 5 распознающей системе, а также к блоку 6, внешние (WД) воздействия и управляющие (UД) воздействия от блока 3 регулирующей системы поступают к блоку 1 - технологическому объекту управления. Индексом "н" обозначены натурные сигналы, а индексом "д" - действительные воздействия. Измеренные входные воздействия UН, WН (сигналы измерительной информации) объекта поступают с блока 7 первичных датчиков сигналов к блоку 2 измерительной системе. Выходные воздействия действующей системы управления YУС от блока 9 через измерительный блок 8 поступают к блоку 6 - вышестоящей системе управления. От блока 2, 3 и 4 сигналы также поступают к блоку 6.
технологического объекта управления (ТОУ), которые поступают с блока 7 первичных датчиков сигналов к блоку 2 измерительной системе, а также к блоку 6. Информация о состоянии других ТОУ и организационно-технологической системы управления (ХВ) поступает к блоку 5 распознающей системе, а также к блоку 6, внешние (WД) воздействия и управляющие (UД) воздействия от блока 3 регулирующей системы поступают к блоку 1 - технологическому объекту управления. Индексом "н" обозначены натурные сигналы, а индексом "д" - действительные воздействия. Измеренные входные воздействия UН, WН (сигналы измерительной информации) объекта поступают с блока 7 первичных датчиков сигналов к блоку 2 измерительной системе. Выходные воздействия действующей системы управления YУС от блока 9 через измерительный блок 8 поступают к блоку 6 - вышестоящей системе управления. От блока 2, 3 и 4 сигналы также поступают к блоку 6.
Для циклических объектов изменение задания и, как следствие, "точки прицеливания" приводит к возникновению дополнительной составляющей в управлении объектом - аналога пробного воздействия:

где U(t) и  - фактически реализованная и прогнозируемая к моменту времени tc смены задания траектория вектора рабочего управления; t∈[tc, tк] - текущее время; tк - момент времени окончания эксперимента.
- фактически реализованная и прогнозируемая к моменту времени tc смены задания траектория вектора рабочего управления; t∈[tc, tк] - текущее время; tк - момент времени окончания эксперимента.
Для случая линейного представления канала регулирования вход - выходные зависимости объекта, начиная с момента времени tc, можно определить в виде

где ΔYc - отклонение измеренного значения Yc выходной величины в конце интервала памяти объекта либо в конце технологического цикла от прежней τn точки прицеливания Y*; S - общее число каналов управления; τ∈[0, τn] - переменная, интегрированная в масштабе времени; τn - время переходного процесса, включающего время чистого запаздывания; fS (τ) - весовая функция по s-y каналу регулирования; PS (t-τ) - величина аналога пробного воздействия s-y каналу регулирования в момент времени t-τ; δS(t-τ) - ошибка прогнозирования уровня рабочих управлений по s-y каналу; ξ(t) - ошибка регулирования учитываемой выходной величины относительно ее уставки; для объектов с непрерывным режимом функционирования tk=tс+τn - момент окончания циклического процесса.
Ошибка прогнозирования δS(t-τ) и ошибка регулирования ξ(t) определяются по данным опытов без нанесения пробного воздействия, т.е. при неизмененном задании. Поскольку ошибки прогнозирования и регулирования зависят от особенностей и условий производства данного вида продукции, то их анализ необходимо проводить по близким организационно-технологическим состояниям системы управления и близким решениям на управления. Для этого организационно-технологическое состояние разделяют на классы Кi, а решения - на группы Гji в данном классе состояний. Статистический анализ δS(t) и ξ(t), а также обработка результатов экспериментов производятся в данной группе Гji организационно-технологических и управленческих ситуаций. Таким путем для реально нелинейных и нестационарных технологических процессов достигается более строгая подгрупповая (типологическая) линеаризованность модели, а также обеспечивается необходимое условие воспроизводимости опытов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКТИВНО-ПАССИВНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ СО СМЕНОЙ ДЕЙСТВУЮЩИХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТАМИ | 2010 |
|
RU2459227C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ В ДЕЙСТВУЮЩИХ СИСТЕМАХ | 2006 |
|
RU2325683C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ КАНАЛОВ РЕГУЛИРОВАНИЯ ОБЪЕКТОВ С НАНЕСЕНИЕМ ПРОБНЫХ СИГНАЛОВ НА ПРОГНОЗИРУЕМЫЕ РАБОЧИЕ УПРАВЛЕНИЯ | 2004 |
|
RU2271561C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДЕЙСТВУЮЩИХ ОБЪЕКТОВ В СИСТЕМАХ УПРАВЛЕНИЯ | 2004 |
|
RU2277259C1 |
| СПОСОБ ФРАГМЕНТАЛЬНОГО УПРАВЛЕНИЯ И ИДЕНТИФИКАЦИИ КАНАЛА РЕГУЛИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА В ДЕЙСТВУЮЩЕЙ СИСТЕМЕ | 2007 |
|
RU2327197C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИК И ВОЗМУЩЕНИЙ ДИНАМИЧЕСКИХ ОБЪЕКТОВ В СТОХАСТИЧЕСКИХ СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2015 |
|
RU2623464C2 |
| СПОСОБ ВЫРАБОТКИ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ ДЛЯ ПРОМЫШЛЕННОГО ОБЪЕКТА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ РАБОЧИМ ПРОЦЕССОМ | 2011 |
|
RU2459225C1 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| СПОСОБ ВЫРАБОТКИ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ ДЛЯ ПРОМЫШЛЕННОГО ОБЪЕКТА УПРАВЛЕНИЯ | 2011 |
|
RU2450303C1 |
Изобретение относится к области автоматического управления и регулирования. Технический результат заключается в повышении точности идентификации за счет качественного прогноза траекторий управления технологическим объектом и траекторий его выходных переменных. Способ включает предварительную оценку ошибок прогнозирования вектора рабочих управлений, а также ошибок регулирования действующей системы управления, прогнозирование к стартовому моменту времени tc прогнозатором вектора рабочих управлений и соответствующей траектории вектора выходных величин, изменение в момент времени tc задания по команде вышестоящей по административно-производственной иерархии управляющей системы, реализацию в обычном режиме полученного задания в действующей системе управления и обработку результатов эксперимента известными процедурами. Перед проведением эксперимента вводится дополнительная операция оценки степени тесноты связи вышестоящей и данной действующей систем управления. При изменении тесноты связи уточняются законы распределения вероятностей ошибок прогнозирования и регулирования и сами алгоритмы прогнозирования. 1 ил.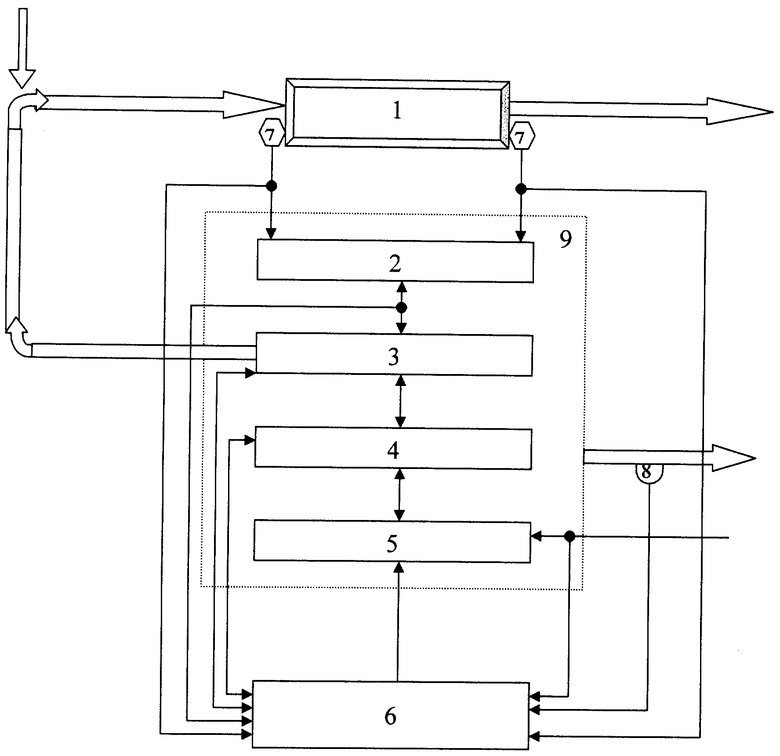
Способ идентификации объектов с изменением заданий, включающий предварительную оценку ошибок прогнозирования вектора рабочих управлений, а также ошибок регулирования действующей системы управления, прогнозирование к стартовому моменту времени tc прогнозатором вектора рабочих управлений и соответствующей траектории вектора выходных величин до конца технологического цикла для объекта с циклическим процессом управления или на интервал времени, превосходящий либо равный интервалу памяти системы управления, для объекта с непрерывным процессом управления, изменение в момент времени tc задания по команде вышестоящей по административно-производственной иерархии управляющей системы, формирование рабочих управлений и их реализацию в обычном режиме полученного задания в действующей системе управления, отличающийся тем, что перед проведением эксперимента дополнительно оценивают изменение степени тесноты связи управляющих решений вышестоящей и данной действующих систем, проводят дополнительное исследование и уточнение изменившихся ошибок прогнозирования и регулирования, а при автоматическом прогнозировании - и алгоритмов прогнозирования.
| ВЕРЕВКИН В.И | |||
| и др | |||
| Идентификация металлургических объектов с изменением заданий | |||
| В: Изв | |||
| ВУЗов | |||
| Черная металлургия, 1999, №3, с.24-28 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ИЛИ, СООТВЕТСТВЕННО, ПРЕДВАРИТЕЛЬНОГО ВЫЧИСЛЕНИЯ ПАРАМЕТРОВ ПРОМЫШЛЕННОГО ПРОЦЕССА, ИЗМЕНЯЮЩЕГОСЯ ВО ВРЕМЕНИ | 1997 |
|
RU2200341C2 |
| US 4755925 A, 05.07.1988. | |||

