Предлагаемое изобретение относится к области автоматического управления.
Известен «Способ идентификации каналов регулирования объектов с нанесением пробных сигналов на прогнозируемые рабочие управления» (патент РФ №2271561 от 01.06.2004). Рассматриваемый способ включает предварительную оценку статистических характеристик ошибок прогнозирования и регулирования, совместное прогнозирование рабочих управлений и вектора выходных величин объекта, нанесение пробного испытательного воздействия на прогнозируемые рабочие управления, фиксирование траекторий изменения входных и выходных величин объекта во времени и оценку динамических характеристик исследуемых каналов регулирования. Дополнительно определяют перечень возможных типопредставительных ситуаций и предварительно оценивают требуемые реакции объекта на эти ситуации, оперативно контролируют наличие и изменение типопредставительных ситуаций на объекте. Затем корректируют траекторию прогнозируемого вектора выходных величин объекта, по отношению к которым оценивают реакцию объекта на пробное воздействие, выбирают алгоритмы назначения параметров реакции объекта на изменение типопредставительных ситуаций в функции параметров самих типопредставительных ситуаций.
Недостатком этого способа является применение пробных испытательных воздействий на объект, без учета случайных возмущений, что снижет точность результатов идентификации, а также получение в результате идентификации из множества выходных параметров объекта только коэффициента передачи, что не дает полного описания характеристик объекта идентификации.
Известен способ и система «Обнаружения аномалий в авиационном двигателе» (патент РФ №2497173 на изобретение от 26.11.2009 г.). Способ заключается в том, что определяют модель поведения для средства управления упомянутого авиационного двигателя посредством использования временной регрессии, которая моделирует поведение упомянутого средства управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и управления упомянутого средства управления. Непрерывно перерассчитывают упомянутую модель поведения для каждого нового набора данных и контролируют статистическую вариацию упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства управления, представляющую аномалию работы упомянутого двигателя. Расчеты для обнаружения аномалии поведения двигателя производятся посредством использования рационального фильтра и модели поведения двигателя. Для расчета текущего рационального фильтра используется полином, в котором используются коэффициенты, приводящие используемые параметры к одинаковой размерности.
Недостатком данного способа является отсутствие расчета характеристик и возмущений, действующих на двигатель, что не дает полного описания характеристик объекта идентификации, а также формирование признака аномалии с учетом экспертных оценок коэффициентов фильтра. Субъективность экспертных оценок коэффициентов фильтра снижает точность результатов идентификации.
В качестве прототипа принят «Способ прогнозирования движения объекта швартовки» (патент РФ №2459742 на изобретение от 02.03.2011 г.). Для обеспечения режимов швартовки судна к подвижному объекту швартовки прогнозируются движения судна и подвижного объекта с использованием базовой математической модели, параметры которой уточняются в реальном времени в процессе режимов швартовки. Технический результат достигается за счет того, что швартующееся судно использует идентифицированную математическую модель плавучего объекта швартовки для прогнозирования характера его движения на расстоянии. Процесс идентификации решается на основании использования невязок по регулируемым параметрам, а критерием качества рассчитывается как сумма квадратов невязок с коэффициентами, устанавливаемыми оператором. Коэффициенты базовой модели определяются на основании минимизации суммы квадратов невязок методом последовательных приближений или Зейделя.
Недостатком данного способа является возможная неустойчивость метода последовательных приближений при малых начальных рассогласованиях и при наличии нелинейности модели судна, что увеличивает количество решений, одновременно удовлетворяющих условиям идентификации, а также зависимость результатов идентификации от коэффициентов невязок, устанавливаемых оператором, что снижает точность идентификации.
Технический результат заявленного изобретения заключается в повышении точности идентифицируемых характеристик и возмущений динамического объекта управления.
В предлагаемом способе технический результат достигается тем, что измеряют выходные параметры качества работы объекта управления. Затем для условий испытаний или штатной эксплуатации методом Монте-Карло проводят статистическое моделирование количества случайных реализаций, для которых запоминают имеющие место характеристики объекта управления и возмущения, действующие на него. Для каждого выходного параметра качества в каждой случайной реализации определяют показатель близости выходных параметров качества полученных при статистическом моделировании и выходных параметров качества полученных в результате испытаний или штатной эксплуатации объекта управления - «запас по невязке». Среди всех параметров для каждой реализации определяют минимальное значение, по минимальным «запасам по невязкам» всех смоделированных реализаций определяют реализацию с максимальным «запасом по невязке». Запомненные в этой реализации характеристики и возмущения являются параметрами идентификации.
При значительных отрицательных значениях «запаса по невязке», не удовлетворяющих требованиям на точность идентификации, проводят второй этап идентификации - в реализацию с максимальным значением «запаса по невязке» по результатам процесса идентификации вводят дополнительные случайные характеристики объекта управления и возмущения, действующие на него, которые не имели места на первом этапе идентификации, и среди реализаций с дополнительными характеристиками и возмущениями находят реализацию, для которой «запас по невязке» максимален.
Разрабатываемый способ предназначен для проведения поиска реализации с наименьшим отклонением результатов статистического моделирования от результатов испытаний или штатной эксплуатации объекта управления. В качестве объекта управления может выступать любой технический объект, например система управления расходованием топлива ракеты-носителя. В ближайшей реализации однозначно определены характеристики математической модели объекта управления и возмущений, действующих на него.
Идентификация характеристик объекта и действующих на него возмущений по результатам испытаний или штатной эксплуатации и статистических расчетов заключается в следующем.
Выделяют выходные параметры качества работы объекта управления, которые с помощью измерительных приборов и датчиков регистрируются в процессе испытаний или штатной эксплуатации объекта управления, и по которым будет проводиться параметрическая идентификация характеристик и возмущений, действующих на замкнутую систему управления.
Выходные параметры могут быть представлены в виде дискретных значений, выражаемых ограниченным набором значений, или в виде непрерывных значений, такие параметры имеют значение в любой момент времени из промежутка значений. Для непрерывных значений выходных параметров качества выделяют одинаковое количество участков реализации по результатам испытаний или штатной эксплуатации и статистических расчетов и для каждого участка рассчитывают средние значения непрерывных параметров, производят расчет невязок и запасов по невязкам.
С учетом требований на точность идентификации, основанных на техническом задании, специалистами задается количество случайных реализаций для моделирования, достаточное для составления статистического массива (≥3000). Случайная реализация - это результаты моделирования на математической модели поведения объекта управления для условий испытаний или штатной эксплуатации при случайно выбранных характеристиках объекта управления и входных возмущениях, действующих на него. Характеристиками объекта управления считаются коэффициенты его математической модели, а условиями испытаний или штатной эксплуатации являются параметры управления, которые действуют на объект во время испытаний или штатной эксплуатации.
Далее на основе базовой математической модели объекта управления моделируют заданное количество случайных реализаций в системе по методу Монте-Карло и запоминают смоделированные реализации, а именно имеющие место характеристики объекта управления и возмущения, действующие на объект управления, путем занесения результатов в оперативное или постоянное запоминающее устройство электронно-вычислительной машины.
Для оценки точности идентификации вводится понятие невязки, характеризующее отклонение результатов статистического моделирования от результатов испытаний или штатной эксплуатации объекта управления и определяемая для m-го параметра на K-ом участке j-ой реализации:
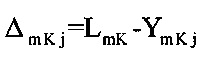 , где
, где
- LmK - значение m-го выходного параметра качества при испытаниях на K-ом участке;
- YmKj - значение m-го выходного параметра качества j-ой реализации на K-ом участке, полученное при математическом моделировании;
- ΔmKj - текущая невязка m-го выходного параметра качества на K-ом участке в j-ой реализации.
Определяют невязку каждого из выбранных параметров переходных процессов по результатам испытаний (штатной эксплуатации) и статистических расчетов.
Затем рассчитывают запас по невязке ZmKj - относительное отклонение невязки от заданного допуска для m-го выходного параметра качества на K-ом участке j-ой реализации:
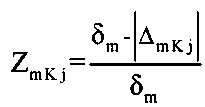 , где
, где
- δm - значение допустимого отклонения m-го параметра в испытаниях и расчетах;
-  - модуль текущей невязки;
- модуль текущей невязки;
- ZmKj - запас по невязке для m-го параметра j-ой реализации.
Запас по невязке является величиной относительной, не использует весовые коэффициенты и позволяет сравнивать параметры разной размерности с учетом требований на точность идентификации, которые определяются разработчиками на основании технического задания.
Запас по невязке показывает, какую долю от принятого допустимого отклонения δm составляет отличие невязки от допуска. Диапазон изменения невязки ±∞, при этом запас по невязке изменяется от 1 до -∞. Максимальное значение запаса, равное 1, соответствует равенству параметров расчета и летных испытаний. Положительное значение запаса (1>ZmKj>0) показывает, что невязка находится внутри заданного допуска. При нулевом значении запаса невязка равна допуску, при отрицательном значении - превышает допуск.
Каждая j-ая реализация может быть охарактеризована минимальным запасом, охватывающим всю совокупность рассматриваемых m выходных параметров качества этой j-ой реализации на каждом K-ом участке.
Из всех jmax реализаций, каждая из которых характеризуется минимальным запасом, ближайшей к испытаниям будет реализация, для которой минимальный запас максимален. На основании рассчитанных сравнительных оценок параметров осуществляется поиск случайной реализации, ближайшей к испытаниям по критерию максимума минимального запаса по всем запасам невязок на всех участках.
Запомненные в выбранной реализации характеристики и возмущения являются параметрами идентификации, которые имели место в испытаниях или штатной эксплуатации объекта управления/
Рассмотрим, как реализуется предлагаемый способ.
В результате испытаний или штатной эксплуатации объекта управления выделяют выходные параметры качества, которые регистрируются измерительной системой. Для условий испытаний проводят статистическое моделирование (метод Монте-Карло) заданного количества случайных реализаций (не менее 3000), регистрируя выделенные параметры качества. По данным испытаний и данным моделирования рассчитывают невязки для всех выходных параметров качества и определяют запасы по невязкам относительно заданных допусков на точность идентификации. Для каждой реализации запоминают минимальные значения запасов по невязкам по всем анализируемым параметрам. Из всех случайных реализаций выбирают реализацию, для которой запас по невязке максимален.
Делается вывод о том, что с наибольшей вероятностью в испытаниях имели место параметры и возмущения, задаваемые в математической модели и реализовавшиеся в данной случайной реализации.
Если имеет место ситуация, при которой запас на ближайшей случайной реализации отрицателен (выходной параметр превышает заданный на него допуск) и не удовлетворяет разработчиков системы, то проводится идентификация не параметрическая, а идентификация в широком смысле, когда в модель системы вводятся дополнительные возмущения и параметры изменяющие, в том числе и структуру системы.
Реализация заявляемого способа с использованием показателя качества - запаса по невязке, являющегося показателем эффективности системы, который не использует весовые коэффициенты функции качества и не требует ее монотонности, позволяет корректно проводить сравнение выходных параметров разной размерности, что позволяет повысить точность идентификации характеристик объекта управления и возмущений, действующих на него в условиях испытаний и штатной эксплуатации. Определение запаса по невязке для всех выходных параметров качества, которые можно измерить в процессе испытаний или штатной эксплуатации объекта управления, позволяет уменьшить количество решений, одновременно удовлетворяющим условиям идентификации, что также повышает точность результатов идентификации. А реализация способа в соответствии с правилом максимизации минимальных значений запасов по невязкам обеспечивает максимальную вероятность близости результатов расчета и испытаний или штатной эксплуатации.
Таким образом, заявляемое изобретение позволяет разрабатывать более точные системы автоматического управления.
Изобретение относится к способу идентификации характеристик и возмущений динамических объектов в стохастических системах автоматического управления. Для идентификации характеристик и возмущений динамических объектов измеряют выходные параметры качества работы объекта управления, проводят статистическое моделирование случайных реализаций методом Монте-Карло, для которых запоминают имеющие место характеристики объекта управления и действующие на объект управления возмущения. Для каждой случайной реализации определяют «невязку» и «запас по невязке», определенные как отклонения и относительные отклонения выходных параметров качества при моделировании и при испытаниях соответственно. Определяют ту реализацию, для которой минимальный «запас по невязке» максимален. Запоминают значения в этой реализации как параметры идентификации. Обеспечивается точность идентифицируемых характеристик и возмущений динамического объекта управления. 1 з.п. ф-лы.
1. Способ идентификации характеристик и возмущений динамических объектов в стохастических системах автоматического управления, заключающийся в том, что измеряют выходные параметры качества работы объекта управления, для условий испытаний или штатной эксплуатации методом Монте-Карло проводят статистическое моделирование случайных реализаций, для которых запоминают имеющие место характеристики объекта управления и возмущения, действующие на объект управления, для каждого выходного параметра качества в каждой случайной реализации определяют показатель невязки - отклонения выходных параметров качества при статистическом моделировании и испытаниях и «запас по невязке» - относительное отклонение невязки от допуска на точность идентификации, для каждой реализации определяют минимальное значение «запасов по невязке» и определяют ту реализацию, для которой минимальный «запас по невязке» максимален, запомненные в этой реализации характеристики и возмущения являются параметрами идентификации.
2. Способ идентификации по п.1, заключающийся в том, что при отрицательном значении «запаса по невязке» в выбранную реализацию вводят дополнительные случайные возмущения и параметры объекта, для которых по методу Монте-Карло проводят статистическое моделирование и поиск ближайшей случайной реализации, для которой «запас по невязке» максимален.
| Устройство для контроля запаса эффективности систем автоматического управления | 1974 |
|
SU519657A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1995 |
|
RU2116663C1 |
| Прокладка для автомобильных шин | 1925 |
|
SU8824A1 |
| US 7966276 B2, 21.06.2011 | |||
| US 6993397 B2, 31.01.2006. | |||

